Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.


2. Номинальная скорость вращения асинхронного двигателя 735об/мин.
Каково число пар полюсов этого двигателя?
3. В паспорте асинхронного двигателя с фазным ротором указано, что
номинальная э.д.с. ротора Е
Р
=240В. При какой скорости вращения двигателя
напряжение на кольцах ротора будет равно указанному значению?
4. Как зависит максимальный момент асинхронного двигателя от вели-
чины питающего напряжения?
5. Что нужно сделать, чтобы изменить критическое скольжение асин-
хронного двигателя?
6. При каких скольжениях асинхронный двигатель работает в режиме
рекуперативного торможения, торможения противовключением?
7. От чего зависит величина индуктивного сопротивления обмотки рото-
ра асинхронного двигателя?
8. Почему у асинхронного короткозамкнутого двигателя пусковой ток
составляет 5,5-6 от номинального, а пусковой момент близок к номинальному?
9. Как реализуется способ динамического торможения асинхронного
двигателя?
10.Поясните принцип изменения числа пар полюсов многоскоростного
асинхронного двигателя.
11.Чему будут равны потери в роторе асинхронного двигателя, если он
путем снижения величины питающего напряжения работает со скоростью 70%
от синхронной при номинальном моменте на его валу?
12.Для чего в цепь ротора асинхронного двигателя с фазным ротором
при пуске включают добавочные сопротивления?
13.Что показывает угловая характеристика синхронного двигателя?
14.Для чего служит короткозамкнутая обмотка (беличья клетка) на рото-
ре синхронного двигателя?
15.Какие источники тока используются для возбуждения синхронного
двигателя?
16.С какой целью регулируют ток возбуждения синхронного двигателя?
17. Что нужно сделать, чтобы коэффициент мощности в цепи статора
синхронного двигателя стал опережающим?
18.Синхронный двигатель работал в режиме, при котором cosφ
1
, = 1. Как
изменится ток статора, если при той же нагрузке на валу увеличить ток возбуж-
дения?
19.Асинхронный двигатель имеет номинальную скорость 980 об/мин.
Какова будет частота тока ротора при работе его в номинальном режиме?
Глава 4. ОБЩИЕ ПРИНЦИПЫ РЕГУЛИРОВАНИЯ ЭЛЕК-
ТРОПРИВОДА
4.1. Регулируемый электропривод - основной вид автоматизи-
рованного электропривода
Применение регулируемого электропривода в составе технологических
машин и агрегатов обычно связано с одним из следующих обстоятельств:
- необходимостью оперативного управления ходом технологического
процесса (электроприводы грузоподъемных кранов, экскаваторов, реверсивных
прокатных станов и других машин);
- необходимостью устанавливать и точно выдерживать технологический
режим (электроприводы станов непрерывной прокатки, бумагоделательных ма-
шин, отделочных агрегатов текстильной промышленности и др.);
- необходимостью корректировки технологического процесса (электро-
приводы питателей, дозаторов и др.);
- автоматическим управлением режимом обработки материала (электро-
приводы станков с ЧПУ и др.);
- стремление оптимизировать технологический процесс по затратам
электроэнергии (электроприводы насосов, вентиляторов, компрессоров).

Приведенный перечень обстоятельств, обуславливающих необходимость
или целесообразность применения регулируемого электропривода, может быть
расширен и дополнен.
По мере развития рабочих машин и механизмов, применения высоких
технологий потребность в регулируемых электроприводах существенно возрос-
ла, и автоматизированный регулируемый электропривод составляет энергетиче-
скую и кибернетическую (с точки зрения управления) основу большинства ра-
бочих машин и агрегатов во всех технологических областях.
Автоматизированный электропривод выполняет две технологические
функции:
- преобразование электрической энергии в механическую, необходимую
для осуществления данного технологического процесса;
- управление технологическим процессом, причем с определенной сте-
пенью оптимизации этого процесса по ряду критериев, таких как: обеспечение
максимальной производительности, точности и качества обработки, минималь-
ного расхода энергии и т.п.; конкретные задачи управления многообразны и оп-
ределяются характером технологического процесса.
Вторая функция автоматизированного электропривода всецело связана с
необходимостью регулирования величин, характеризующих движение электро-
привода (скорости, момента, положения рабочего органа). Выполнение этой
функции возможно только посредством использования регулируемого электро-
привода. Использование для целей регулирования механических или гидравли-
ческих средств (вариаторы, коробки передач, гидромуфты и др.) сегодня являет-
ся технически и экономически неоправданным.
Под регулируемым электроприводом понимается электропривод, обес-
печивающий плавное с необходимой точностью регулирование скорости (или
момента) в заданном диапазоне. Однако требования к регулируемому электро-
приводу этим не ограничиваются. Система управления регулируемого электро-
привода должна обеспечивать также заданный характер переходных процессов
при изменении скорости, момента или других параметров электропривода.
Поскольку по своим электромеханическим свойствам электродвигатели
в естественной схеме включения в питающую сеть не могут обеспечить регули-
рование параметров движения электропривода с нужным качеством, для созда-
ния регулируемого электропривода приходится преобразовывать электрическую
энергию, подводимую к (или отводимую от) двигателю. Преобразование элек-
трической энергии осуществляется посредством полупроводниковых преобра-
зователей.
Регулируя параметры преобразованной электрической энергии (частоту,
напряжение, форму и длительность импульсов и др.) удается получить требуе-
мые для регулируемого привода механические и динамические характеристики.
Для управления параметрами (напряжение, частота и др.) полупроводниковых
преобразователей, входящих в состав регулируемого электропривода, служат
внутренние контуры автоматического регулирования -это регуляторы тока,
э.д.с., тока возбуждения и др. В этом смысле регулируемый электропривод все-
гда является автоматизированным, т.к. содержит средства автоматического
управления, формирующие характеристики электропривода.
Внешние контуры регулирования определяют переменные, характери-
зующие движения электропривода: скорость или положение рабочего органа.
Обычно эти контуры регулирования являются замкнутыми, т.е. содержат отри-
цательную обратную связь по регулируемому параметру и соответствующий ре-
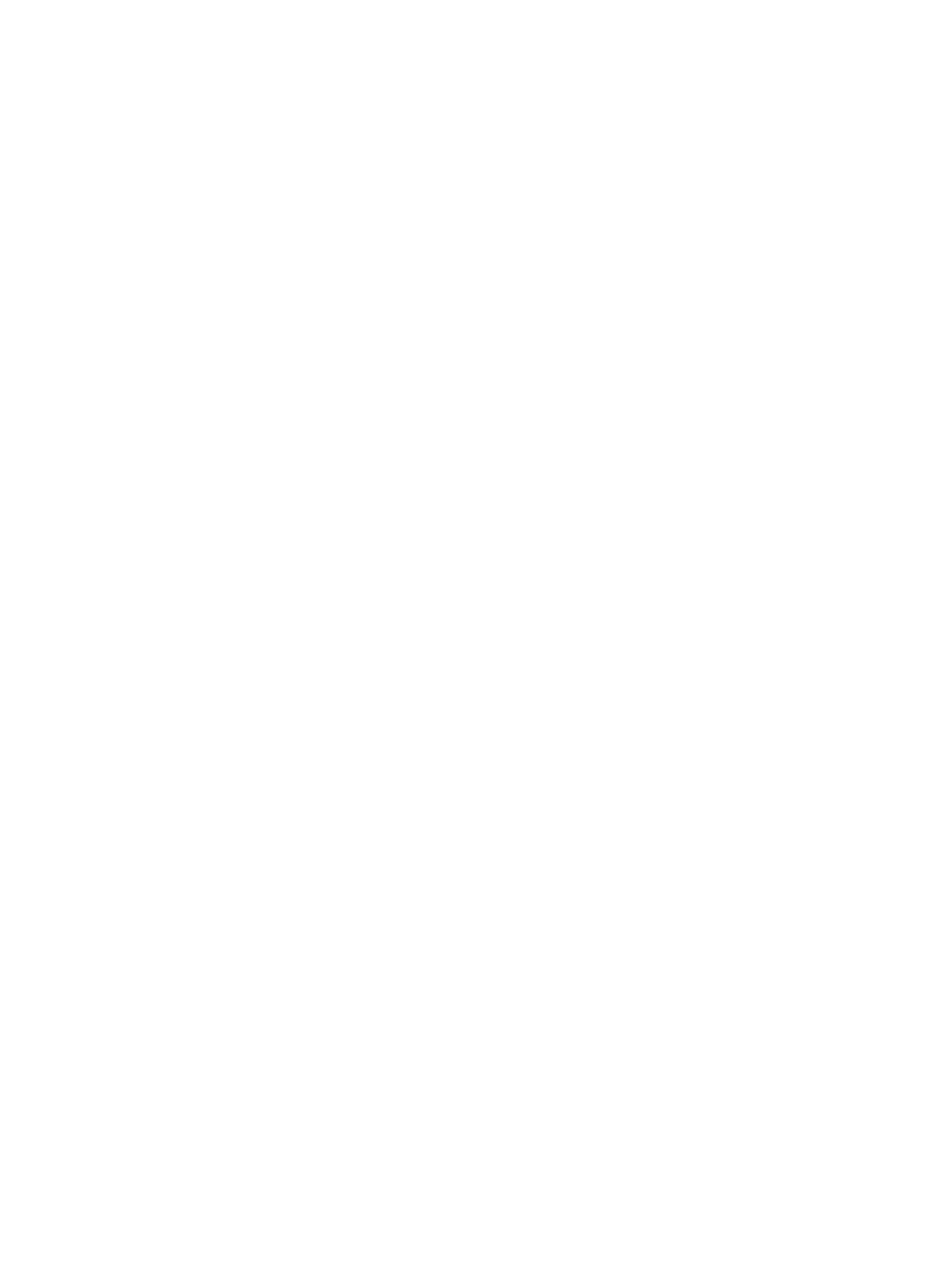
гулятор. Типичная схема замкнутого контура регулирования скорости представ-
лена на рис.4.1.
Задание на скорость uзс может фор-
мироваться вручную - машинистом экскава-
тора, крановщиком, оператором и др., или
автоматически - от системы числового про-
граммного управления (системы ЧПУ в при-

приводе станков), от технологических регуляторов или управляющих устройств
верхнего уровня автоматизации.
Передаточная функция регулятора скорости W
РС
(р) выбирается такой,
чтобы обеспечить требуемое качество регулирования по статическим (диапазон,
точность) и по динамическим показателям (быстродействие, перерегулирование,
колебательность).
Двигатели, полупроводниковые преобразователи электрической энергии,
датчики и устройства автоматического регулирования в своей совокупности об-
разуют систему регулируемого электропривода. Эти системы различаются, пре-
жде всего, по виду приводного электродвигателя, а также по виду используемых
полупроводниковых преобразователей электрической энергии, питающих дви-
гатель.
Регулирование скорости - это принудительное посредством системы
управления изменение скорости, исходя из требований технологического про-
цесса. Такое регулирование производится при подаче на вход системы регули-
рования управляющего воздействия. Однако регулирование скорости может
производиться и при неизменном управляющем воздействии, когда задача регу-
лирования заключается в стабилизации скорости при появлении возмущающих
воздействий, например при изменении нагрузки, прикладываемой к валу элек-
тродвигателя.
4.2. Показатели качества регулирования скорости
Одним из основных показателей, характеризующих регулирование ско-
рости электропривода, является диапазон регулирования. Диапазон регулирова-
ния D - это отношение максимальной установившейся скорости электропривода
к минимальной при изменении нагрузки на валу двигателя в заданных пределах.
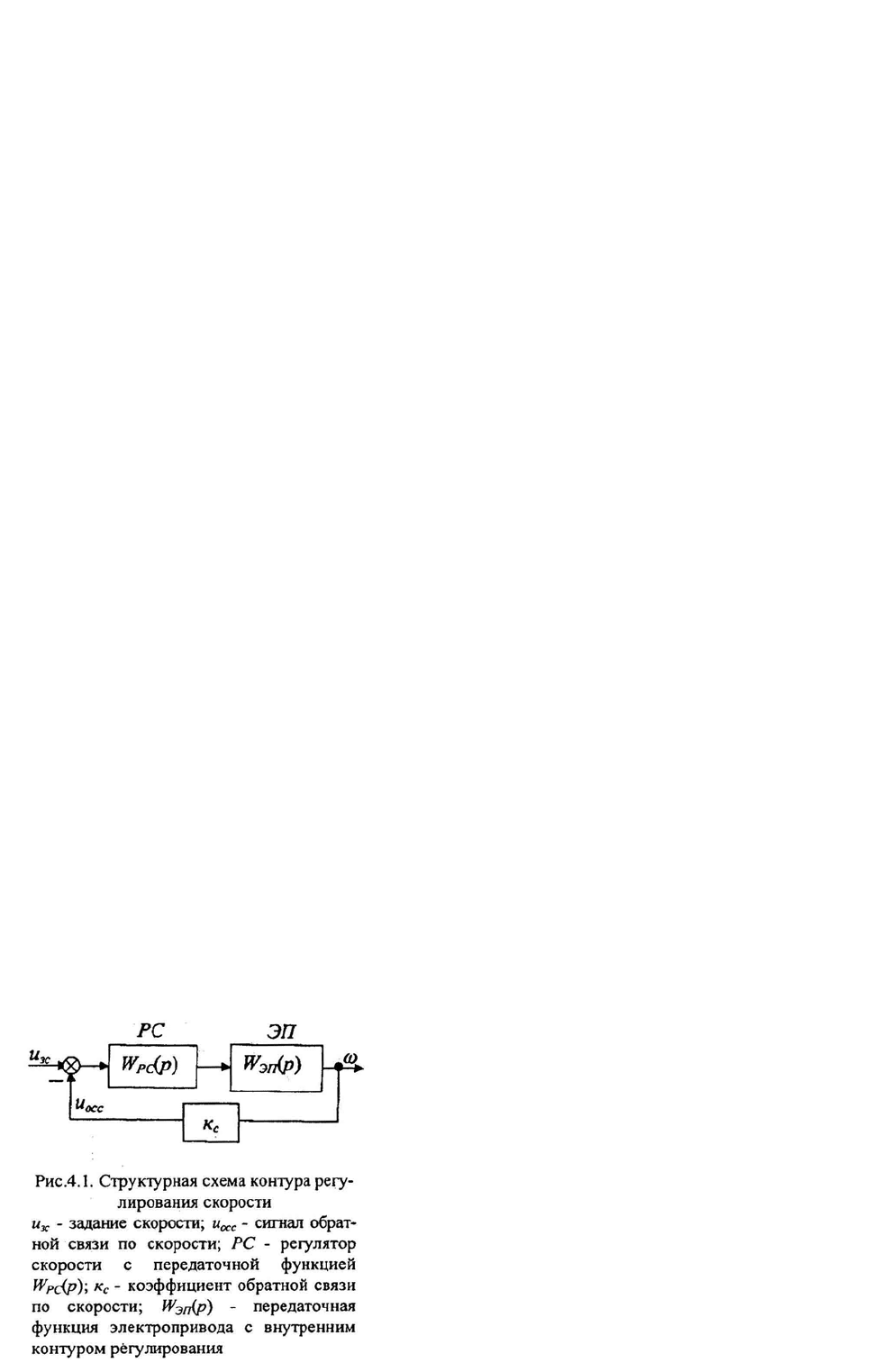
Определение величины диапазона регулирования показано рис.4.2.
Положим, что электропривод имеет
прямолинейные механические характеристи-
ки. Прямая 1 соответствует максимальной по
скорости механической характеристике.
Положим, что регулировочные
характеристики привода будут перемещаться
вниз параллельно характеристике 1, имея ту
же жесткость β что характерно для
большинства современных систем
регулируемого электропривода. Нижняя предельная характеристика, которая
будет обеспечивать требуемый максимальный момент, будет характеристика 2.
Диапазон регулирования будет равен отношению максимальной скорости к ми-
нимальной, которые определяются по среднему моменту из заданных мини-
мального и максимального его значений [8]
2
минмакс
ср
ММ
М
−
=
б
а
мин
макс
D
ω
ω
ω
ω
== (4.1)
Из графиков рис.4.2. найдем:
β
ωω
2
0
минмакс
макс
ММ +
−=
β
ωω
2
0
минмакс
мак
ММ
−
−=
Подставляя эти значения в (4.1), получим:
минмакс
минмакс
ММ
ММ
D
−
−
−
=
0
2
βω
(4.2)
Здесь и далее β - абсолютное значение жесткости.
Из формулы (4.2) следует, что диапазон регулирования зависит от жест-
кости механических характеристик привода: чем больше жесткость, тем больше
диапазон регулирования.
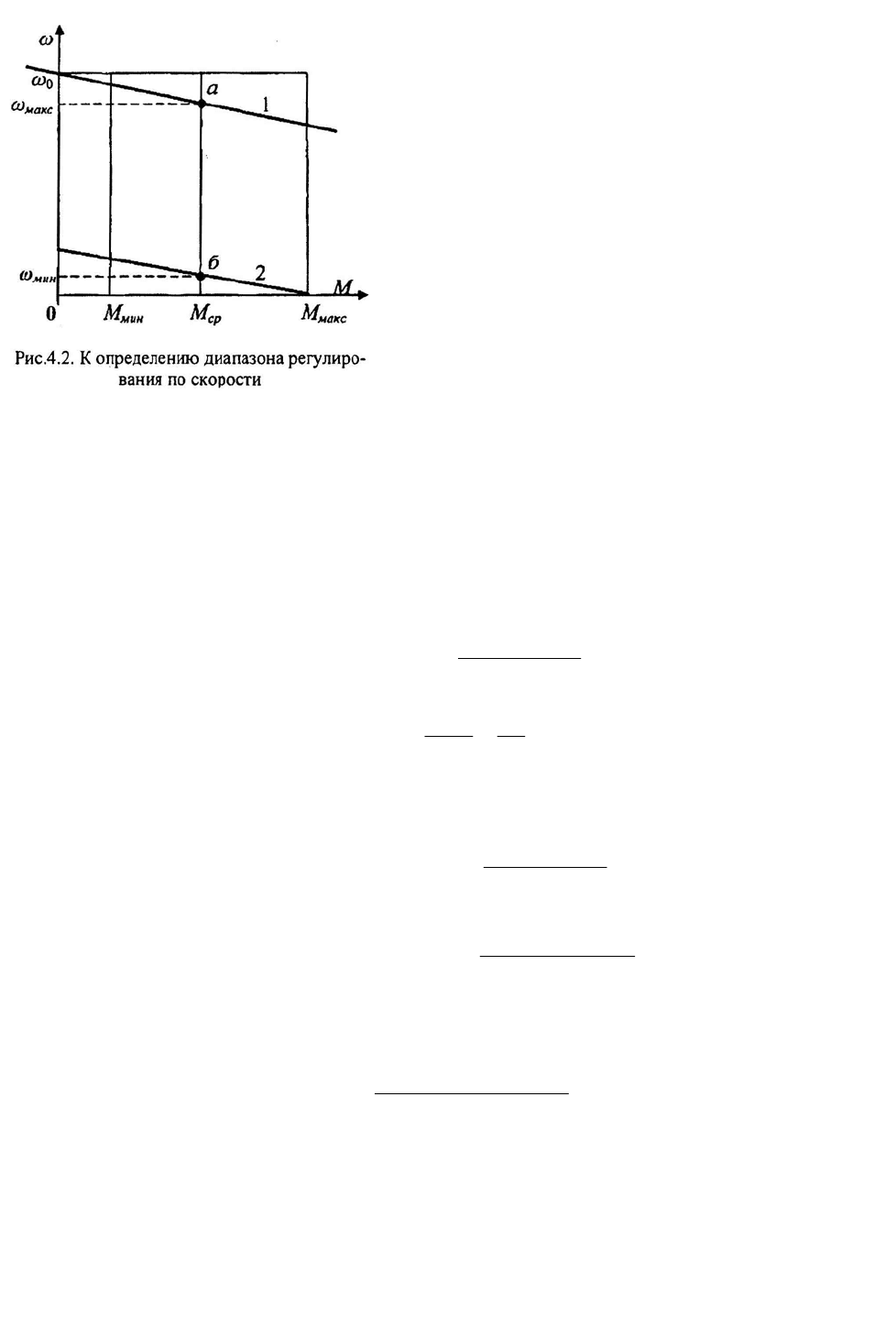
Вторым важным показателем
качества регулирования является
точность регулирования скорости.
Статическая ошибка Δω
с
характеризует
реакцию электропривода на приложение
(снятие) нагрузки. Если мы анализируем
регулируемый электропривод, имеющий
линейные (линеаризованные)
механические характеристики, которые в зависимости от управляющего воздей-
ствия могут плавно перемещаться вниз от основной с постоянной жесткостью β
(см. рис. 4.3), то абсолютная статическая ошибка будет равна:
β
ω
с
с
М
=Δ
(4.3)
Эта ошибка при постоянной жесткости механических характеристик бу-
дет одна и та же во всем диапазоне регулирования.
Относительная величина ошибки находится как отношение аб-
солютной ошибки к базовой (заданной) скорости. Она тем больше, чем меньше
заданная скорость.
зад
с
с
ω
ω
Δ
=Δ (4.4)
Из (4.3) и (4.4) следует, что величина статической ошибки, связанной с
возмущением по нагрузке, обратно пропорциональна жесткости механически
характеристик: чем больше жесткость, тем меньше статическая ошибка.
Нижнее значение скорости ω
мин
заданного диапазона регулирование ско-
рости может ограничиваться также требуемой точностью регулирования (ста-
тизмом). В соответствии с (4.4) точность поддержания заданной скорости, как
величина относительная, будет тем хуже, чем меньше заданная минимальная
скорость. Поэтому условие выполнения заданной точности будет
доп
мин
с
Δ≤
Δ
=Δ
ω
ω
Учитывая, что
β
ω
2
МминМ
макс
−
=Δ
получим
доп
макс
мин
МминМ
Δ⋅
−
=
β
ω
2
Тогда диапазон регулирования скорости из условия обеспечения задан-
ной точности будет
минмакс
минмаксдоп
мин
макс
ММ
ММ
D
−
−
−
Δ
==
)2(
0
βω
ω
ω
(4.5)
Обычно жесткость механических характеристик электропривода с ра-
зомкнутой системой управления недостаточна для достижения требуемого диа-
пазона регулирования и требуемой статической
точности. Потому в регулируемых электроприводах,
как правило, используются замкнутые по скорости
системы регулирования.
Рассмотрим влияние отрицательной обратной
связи по скорости на механические характеристики
электропривода.
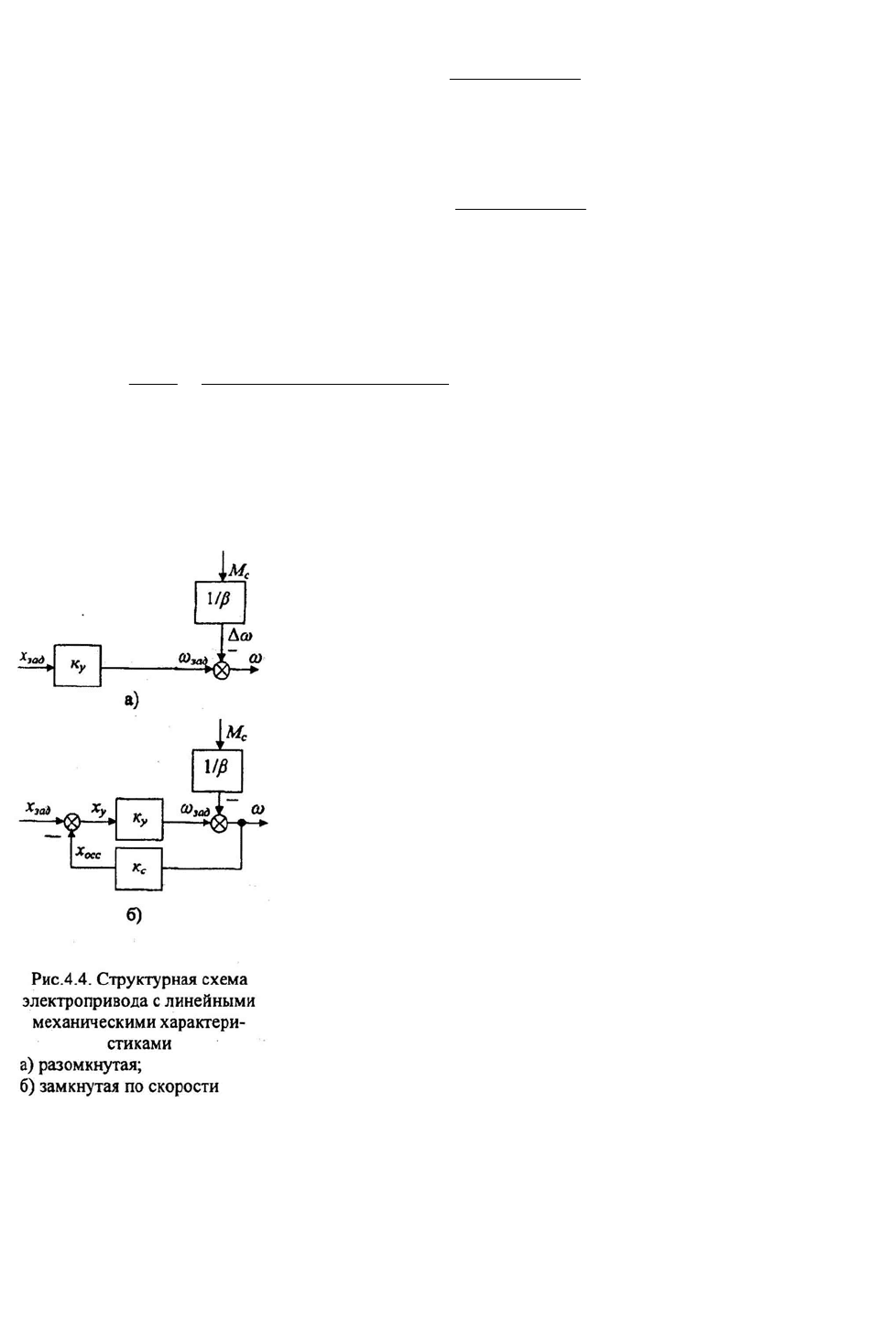
На рис.4.4 представлена структурная схема
электропривода с разомкнутой системой управления
(рис.4.4,а) и с системой управления, включающей в
себя отрицательную жесткую обратную связь по
скорости, т.е. с замкнутой по скорости системой
управления (рис.4.4,б). При разомкнутой системе
управления заданная скорость определяется как ω
зад
= к
у
х
зад
(см. рис.4.4,а).
Величина статической ошибки, возникающей при приложении момента
нагрузки М
с
, будет зависеть от жесткости механических характеристик (см. 4.3).
Разомкнутая система управления не может автоматически компенсировать или
уменьшить ошибку по возмущению.

В замкнутой системе управления с жесткой отрицательной обратной свя-
зью по контролируемому параметру (в рассматриваемом случае по скорости)
величина этого параметра через датчик скорости с передаточным коэффици-
ентом к
с
подается с отрицательным знаком на вход системы регулирования
ω
сосс
кх
=
(4.6)
Таким образом, регулирование скорости производится по величине
ошибки, т.е. разности между заданным и действующим значениями скорости
оссзаду
ххх
−
=
(4.7)
Рассмотрим механизм действия отрицательной обратной связи (см.
рис.4. 5). Пусть характеристики 1 - механические характеристики привода с ра-
зомкнутой системой управления. Если задано значение скорости ω
0зад
, то при М
с
= 0 привод будет работать с заданной скоростью. При приложении нагрузки М
с
и разомкнутой системе регулирования скорость двигателя снизится на величину
∆ω, пропорциональную отрезку ав. При этом двигатель работает на механиче-
ской характеристике, определяемой прямой ω
0зад
-в, имеющей жесткость β и про-
садка скорости определяется величиной ∆ω
с
= М
с
/ β .
В замкнутой системе регулирования процесс изменения скорости проте-
кает иначе. После приложения нагрузки скорость начнет снижаться. При этом
будет уменьшаться сигнал обратной связи по скорости к
с
ω. в результате чего
разность (х
зад
-х
осс
) увеличится, а, следовательно, увеличится сигнал задания ско-
рости ω
зад
)
(
оссзадузад
ххк
−
=
ω
(4.8)
Увеличение сигнала задания скорости холостого хода произойдет до ве-
личины ω
об
, и двигатель автоматически перейдет на механическую характери-
стику ω
об
-б
и после завершения переходного процесса будет работать в точке б.
В результате установившаяся ошибка скорости составит ∆ω
замк
, определяемую
отрезком аб, существенно меньшим, чем это было бы в разомкнутой системе
ав
аб
замкс
=
Δ
Δ
ω
ω
.
(49)
Если статический момент равен М
сг
то привод будет работать в точке г,
если М
с
= М
се
то привод будет работать в точке е.
Мы видим, что механическая характеристика замкнутой системы пред-
ставляет собой совокупность точек ω
0зад
-г-б-д-е, принадлежащих механическим
характеристикам разомкнутой системы с различными значениями скорости хо-
лостого хода. Жесткость β
замк
механической характеристики замкнутой системы
(прямая 2) будет выше жесткости характеристик разомкнутой системы.
Механическая характеристика замкнутой системы будет
замк
с
М
β
ωω
−=
0
,
где ω
0
определяется из (4.8)
β
ω
с
оссзаду
М
ххк
−−= )(
β
ωω
с
сузаду
М
ккхк
−−=
откуда
)1(1
су
с
су
заду
кк
М
кк
хк
+
−
+
=
β
ω
обозначив к
у
к
с
=К - коэффициент усиления разомкнутой системы (при
разрыве обратной связи по скорости), получим
)1(1 К
М
К
хк
с
заду
+
−
+
=
β
ω
или
замк
с
замкзаду
М
хк
β
ω
−=
.
,
где )1( К
замк
+
=
β
β
4.10)
Мы видим, что жесткость механических характеристик в замкнутой сис-
теме увеличивается по сравнению с жесткостью механических характеристик
разомкнутой системы в (1+К) раз.
Следовательно, статическая ошибка уменьшается в (1+К) раз