Новиков С.О. Лекции по CoDeSyS
Подождите немного. Документ загружается.

Лекция CoDeSys (Новиков).
В стандарте Мэк есть понятие боле высокого уровня чем - это конфигурация – множество
ресурсов, взаимодействующих определённым образом (сконфигурированных). В одной системе
может быть несколько интеллектуальных ресурсов, каждый из которых обладает собственным
процессором, памятью и системой исполнения. Каждый из них можно программировать. Это
могут быть реальные модули или виртуальные машины, эмулируемые одним процессором. Все
они имеют доступ к определённым наборам входов и выходов, и координируют свою работу с
помощью глобальных переменных, расположенных в общедоступной памяти. Таким образом, для
программирования каждого ресурса (в рамках МЭК конфигурации) должен быть создан
отдельный проект. Т.к. система программирования универсальная, то различий между ресурсом и
конфигурацией не делается. Техника реализации, распределённых систем существенно зависит от
конфигурации конкретного ПЛК. Таким образом инструмент «PLC Con|gura~on» на вкладке
ресурсов проекта CoDeSys – это инструмент выполняющий конфигурирование ПЛК.
ЯЗЫКИ МЭК.
ПРОБЛЕМЫ ПРОГРАММИРОВАНИЯ ПЛК
Мы говорим, что ПЛК функционирует циклически – читает входы, выполняет прикладную
программу и записывает выходы. В результате прикладное программирование для МЭК-ПЛК
существенно отличается от традиционной модели, применяемой при работе с языками высокого
уровня. Рассмотрим простейшую задачу: Необходимо запрограммировать мерцающий
индикатор. Очевидно, что алгоритм проекта должен быть следующим.
1) Включить выход
2) Выдержать паузу
3) Включить выход
4) Выключить паузу
5) Переход к шагу 1 (начало цикла)
6) Конец программы.
Реализованная по этому алгоритму программа работать не будет. Во-первых, она содержит
бесконечный цикл. Весь код прикладной программы выполняется в каждом рабочем цикле от
начала и до конца, любая прикладная программа ПЛК является частью рабочего цикла и должна
возвращать управление системе исполнения. Следовательно, шаг 5 является лишним. Если его
удалить – программа работать будет, но не так как задумана. Выход всегда будет находиться во
включённом состоянии, т.к. его установка происходит по окончанию работы прикладной
программы 1 раз. Промежуточные изменения значений выходов не отображаются на аппаратные
средства. Что ещё плохо в данном алгоритме – это задержки времени. Вполне вероятно, что
кроме мерцания выхода ПЛК будет выполнять и другую работу, т.е. программу необходимо будет
дополнять, но, если контролер занят ожиданием это означает, что он ничего больше сделать не
сможет. Следовательно, задержки времени нужно реализовать иначе. Достаточно засечь время и
заняться другой работой, периодически контролировать часы. Также поступают и люди. С учётом
выше изложенного алгоритм станет следующим.
1) Проверить таймер, если время паузы вышло, то:
А) инвертировать выход ( включить если выключен и наоборот)
Б) начать отсчёт новой паузы
2) Конец программы.
Алгоритм получился гораздо проще. Технология ПЛК ориентирована именно на такие задачи.
ПЛК КАК КОНЕЧНЫЙ АВТОМАТ
Чтобы хорошо писать программы для ПЛК необходимо научиться думать определённым образом.
Секрет состоит в том, чтобы представить себе контроллер не как машину, непосредственно
выполняющую команды программы, а как конечный автомат. В любом автомате существует
множество входов (Х), множество выходов (Y) и множество состояний (S). В нашем случае – это
конечные множества, т.к. число входов и выходов ПЛК ограниченно также как и память
переменных. Начальные состояния однозначно определены, т.е. s нулевое принадлежит S.
Автомат работает по тактам. Для ПЛК – это рабочий цикл, в каждом такте значение входов
известно, значение выходов определяется текущим значением входов и текущим состоянием.
Лекция CoDeSys (Новиков).
Реакция автомата зависит только от текущего состояния без предыстории, т.е. не важно, как он
пришёл в это состояние. Вместе с тем текущее состояние изменяется также по тактам. Автомат
переходит в новое состояние (сигма). В теории автоматов описанные 6 объектов
А=(Х,Y,S,s,лямбда,сигма) принято называть конечным автоматом Мили. Классическая сфера
применения ПЛК – программная реализация автоматов. Контроллер вычисляет программно
заданную функцию выходов и функцию переходов. В каждом рабочем цикле ПЛК вычисляет
значения для выходов, которые необходимо изменить. В итоге прикладная программа для ПЛК
очень похожа на вычисление по формуле. Типовым примером дискретного автомата является
управление стиральной машиной. Базовые механизмы этого устройства включают:
1) Клапан подачи воды
2) Помпу слива воды
3) Таймер Привод барабана
4) Нагреватель
Каждому механизму можно сопоставить логическую переменную. Все возможные состояния
определяются множеством переменных. Переход из одного состояния в другое происходит под
воздействием входного сигнала. Таймер является самостоятельным блоком. Сигнал окончания
выдержки времени является выходом. Если расширить понятия автомата можно рассматривать
переходы как функции событий. События не обязательно связаны с входами. Таким образом,
окончания тайм аута можно воспринимать, как событие при этом совершенно не важно, как
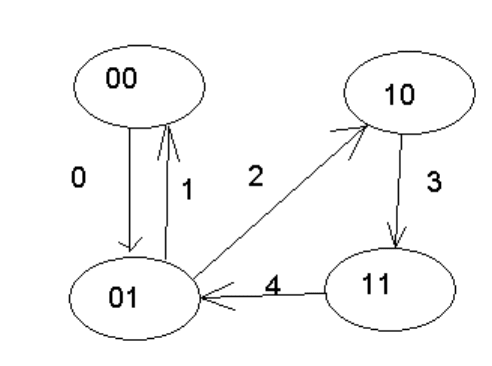
реализован таймер. Модель такой системы можно изобразить с помощью графа состояния.
Состояния отображаются овалами, содержащими , а переходы направленными дугами.
Диаграмма состояний очень эффективный инструмент программирования и анализа автоматов.
Граф состояний для двух переменных.
Технически база для построения ПЛК разнообразна. Это реле, электронные схемы, пневма-
системы и т.д. Но в отличие от них технология ПЛК обеспечивает гибкое и быстрое решение.
Безусловно программирование микропроцессоров и программируемых логических матриц с
помощью графов состояний также возможно, но значительно более трудоёмко. Делается это пи
наличии специального оборудования и специально подготовленным персоналом. Применение
формализма количества информации позволяет значительно упростить процесс
программирования . Следовательно хорошо проработанные спецификации проекта позволяют
программисту выполнять качественно. Неточности в тех задании или плохо проработанная
система неизбежно выливается в переделки и затяжную атаку. Поэтому описание задачи в виде
словесного алгоритма и рисунков на бумаге всегда позволяет значительно упростить алгоритм и
не упустить детали. Самое обидное, что детали как правило просты, но из-за отсутствия некоторых
из них приходится пересматривать всю структуру построения управляющей программы. Например
забыта кнопка аварийной блокировки или фиксации промежуточного положения для настройки
механики (по аналогии с 1ой лабой, где забыта деталь реализации отпускания клавиш). Для
выявления подобных тонкостей необходим действующий прототип системы и соответствующее
средство, позволяющее его построить. Одной из важнейших задач при создании языков ПЛК и
комплексов программирования являются возможностей реализовывать прототип без вложения
Лекция CoDeSys (Новиков).
средств. Приём это должен быть действующий прототип, а не картинка. Высокоуровневая модель
даже созданная из пустых блоков должна работать так, чтобы её можно было
продемонстрировать заказчику, обсудить и отработать. Далее прототип должен стать скелетом
готовой программы без какой-либо переделки. Только так программист получит возможность
сразу написать правильную и красивую программу, а не переписывать её по частям.
СИМЕЙСТВО ЯЗЫКОВ МЭК
Диаграммы SFC стоят особняком, а точнее выше по отношению к другим языкам являются
высокоуровневым графическим инструментом. Благодаря SFC идея превращения модели системы
в законченную программу становится реальностью. SFC даёт действующий непосредственно в
ПЛК прототип.
СЕТИ ПЕТРИ
Одним из методов формального описания дискретных систем являются сети Петри. Он опирается
на разделение системы или отдельных её систем на множество простых позиций. Позиции
описываются состоянием части системы. Переходы между позициями происходят при
выполнении определённых условий. Позиция отображается в виде окружности. Переходам
соответствуют отрезки направленных дуг соединённых с позициями. Каждая позиция способна
обладать маркером и передавать его другим позициям по исходящим дугам. Маркеры
отображаются в виде жирной точки. Допускается присутствие нескольких маркеров. К переходу
приходит одна или несколько дуг, идущих от разных позиций. От перехода также могут отходить
несколько исходящих дуг, ведущих кК разным позициям. Проверка условия перехода
производится, только если хотя бы одна из его позиций владеет маркером. Существенным
моментом сетей Петри является то, что несколько позиций могут одновременно иметь маркер.
ТУТ БУДЕТ РИСУНОК
Таким образом, сети описывают процессы, работающие параллельно и взаимосвязано. Состояние
сети определяется совокупностью позиций владеющих маркерами.
SFC-ДИАГРАММЫ
В отличии от сетей петри дуги в SFC имеют яркую направленность сверху вниз, позиции
вызываются шагами или этапами, отображаются в виде прямоугольников. Задать несколько
стартовых шагов в SFC нельзя. SFC-диаграмма состоит из шагов и переходов между ними.
Разрешение перехода определяется условием. С шагом связаны определённые действия.
Действие описывается на любом языке МЭК. В них можно также использовать вложенные SFC-
диаграммы, но в конечном счёте действие нижнего уровня всё равно будет описано на языках IL,
ST, LD, FBD. Каждая позиция SFC требует собственного признака активности. Из-за необходимости
внутренней памяти только функциональные программы и блоки могут быть реализованы на SFX
(функции не могут). Целью использования SFC является разделение на определённые этапы с
формально определённой логикой работы. SFC даёт возможность быстрого построения прототипа
системы без программирования. Причём для построения верхнего уровня не требуется детально
описания действий, также как и привязки к аппаратным ресурсам.
ШАГИ
Любая SFC-схема составляется из элементов. Шаги на схеме могут быть пустыми – это не вызывает
ошибки. Определить действие, привязанное к шагу можно в любое время. Нет ничего странного,
что в полностью законченном проекте могут быть пустые шаги, т.к. шаг является ожиданием
перехода. (Из sfc-диаграммы удалить шаг можно только вместе с переходом, предварительно
выделив их.) Если правый верхний угол шага содержит признак затемнённого треугольника – шаг
содержит действие
Лекция CoDeSys (Новиков).
ПЕРЕХОД
Ниже шага на соединительной линии присутствует линия – она обозначает переход. Условием
перехода может служить логическая переменная, логическое выражение, константа или прямой
адрес. Переход выполняется при соблюдении двух условий:
1) Переход разрешён (соответствующий ему шаг активен);
2) Условие перехода имеет значение True.
Простые условия отображаются непосредственно на диаграмме справа от черты, обозначающей
переход. В CoDeSys на диаграмме можно записывать выражении только на языке ST. Для
громоздких условий применяется другой подход. В этом случае на диаграмме записывается
индикатор перехода. Само же условие записывается на одном из языков, кроме SFC в отдельном
окне редактора. Переменные или прямые адреса используются в условиях перехода только для
чтения. В условном выражении перехода нельзя вызывать экземпляры FB и использовать
операцию присваивания. Признаком того, что идентификатор перехода на диаграмме является
отдельным реализованным условием, является закрашенный угол перехода. В качестве условия
перехода может использоваться логическая константа. Если задано TRUE, то шаг будет выполнен
однократно за один рабочий цикл. Далее управление передаётся следующему шагу. Если задано
False, то шаг будет выполняться бесконечно.
НАЧАЛЬНЫЙ ШАГ
Каждая SFC-диаграмма начинается с шага, выделенного двойной линией по всему периметру.
Наименование начального шага может быть произвольным. По умолчанию Init. Он присутствует
обязательно, может быть пустым.
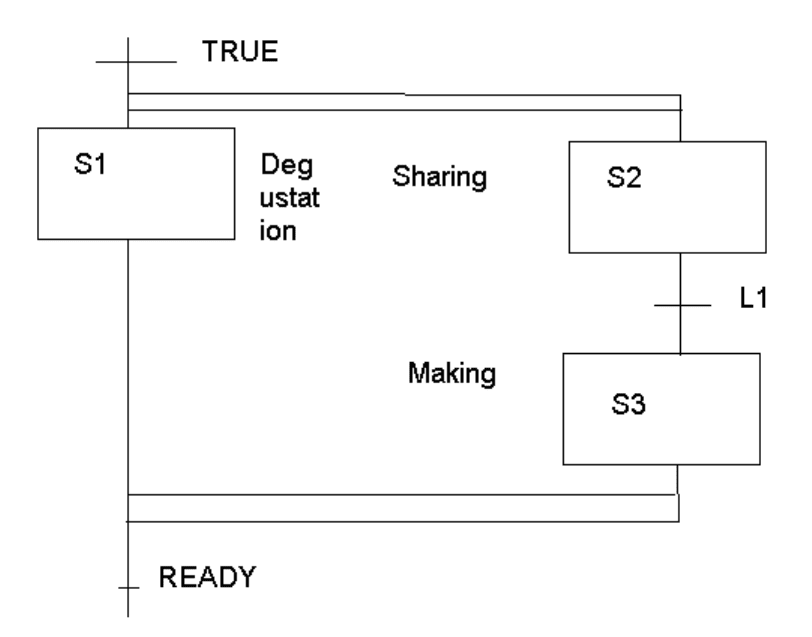
ПАРАЛЛЕЛЬНЫЕ ВЕТВИ
Несколько ветвей SFC могут быть параллельными.
Признаком параллельности является двойная горизонтальная линия. Каждая параллельная ветвь
начинается и заканчивается шагом, т.е. условие входа в параллельность всегда одно, условие
выхода тоже одно. Параллельные ветви выполняются теоретически одновременно. На практике -
слева направо. Условие выхода, завершающее параллельность проверяется только в том случае,
если в каждой параллельной ветви активны последние шаги. В нашем конкретном случае Sharking

Лекция CoDeSys (Новиков).
будет выполнено однократно, а Degusta~on и Making будут работать параллельно по достижении
условия READY.
АЛТТЕРНАТИВНЫЕ ВЕТВИ
Несколько ветвей могут быть альтернативными. Их признаком является одинарная
горизонтальная линия. Каждая альтернативная ветвь начинается и заканчивается с условия
перехода. Проверка альтернативных условий выполняется слева направо. Если альтернатива
найдена, то оставшиеся условия не проверяются. В альтернативных условиях работает только
одна ветвь, поэтому её окончание и будет означать переход к следующему за альтернативной
группой шагу.
В данном примере альтернатива STOP оценивается первой, шаги DOWN и UP могут стать
активными, только если STOP-FALSE. При создании альтернативных ветвей используются только
взамо в этом случае вероятность допустить ошибку исключена
ПЕРЕХОД НА ПРОИЗВОЛЬНЫЙ ШАГ
В общем случае SFC-диаграмма выполняется сверху вниз. Стандартом допускается переход на
произвольный шаг, для этого применяются соединительные линии с промежуточными стрелками
или поименованные переходы, т.е. осуществляется переход на шаг, имя которого, указано под
стрелкой (JUMP).
В данном примере при условии STOP-FALSE шаги M_D и M_UP соединены в логическое кольцо,
при этом STOP проверяться больше не будет. В этом случае имеется два варианта входа, но ни
одного варианта выхода. Маркер активности при этом будет перемещаться исключительно в этом
кольце. Прыжок из одной ветви параллельного блока наружу, вызывает эффект размножения
маркера. Прыжок внутрь параллельного блока нарушает параллельность ветвей. Подобных
трюков следует избегать. Есть возможность использовать упрощённую SFC-диаграмму. Смысл её
заключается в применении более простого, компактного и быстрого последовательного SFC-
исполнителя. Само построение упрощённого SFC получается компактнее и проще для понимания.
В упрощённом SFC нельзя использовать включение и выключение действий в рамках одного шага
и управлять активностью действия по времени. Действия могут быть трёх классов – текущее,
входное и выходное. Графически эти действия никак не отображаются. Их редактирование
выполняется в отдельных окнах. В упрощённом SFC действие принадлежит шагу, т.е. действие
нельзя вызвать из другого шага или откуда-либо ещё. Можно считать, что каждый шаг содержит 3
Лекция CoDeSys (Новиков).
раздела, соответствующие трём возможным действиям. Такие действия не требуют отдельных
идентификаторов и называются по имени шага. Для создания новго или редактирования
существующего действия CoDeSys достаточно щёлкнуть по прямоугольнику шага. Это приводит к
открытию окна редактора и вызывается диалог создания нового действия.
ВХОДНОЕ И ВЫХОДНОЕ ДЕЙСТВИЕ
Весьма вероятен слуяай когда определённое действие нужно выполнить в шаге только один раз.
Напрмер включить нагрев в начале активности шага и выключить при переходе на другой шаг. Для
этого предусмотрены входное и выходное действие. Входное – E(entry). Выходное – X (exit). На
диаграмме в шаге входное действие располагается в левом нижнем углу, выполняется
однократно при активации шага. Выходное Х располагается в левом нижнем углу, выполняется
однократно при завершении шага.
МЕХАНИЗМ УПРАВЛЕНИЯ ШАГОМ
Для каждого шага CoDeSys создаёт две логические переменные. Допустим шаг называется Step_1.
Для него будут определены 2 переменные:
1) _Step1
2) Step1
Объявление переменных происходит неявно, т.е. в разделе объявления переменных никаких
записей делать не надо. Переменная с лидирующим подчёркиванием _STEP1 получает значение
TRUE, когда шаг активируется () условие выполнено, и сбрасывается при деактивации шага (сразу
после выполнения условия). Переменная STEP1 отстаёт на один рабочий цикл, т.е. получает
значение TRUE, после выполнения входного действия и сбрасывается после выполнения
выходного действия. Комбинация двух этих переменных _STEP1 и STEP1 образует 4 возможных
состояния шага:
0 0 – не выполняется;
1 0 – входное действие;
1 1 и 1 0 – текущее действие;
0 1 – выходное действие.
Данные переменные можно использовать для определения активности шага. Например с целью
синхронизации параллельных ветвей.
ЗДЕСЬ Ещё РИСУНОК
Так в примере шаг STEP4 не может быть закончен раньше STEP2. Для доступа к переменным шага
вне данного компонента из Отладчика их необходимо определить как логические переменные.
Предварительная установка переменных шагов в отладчике даёт возможность быстро перейти к
отладке определённого действия системы. Обращаться к переменным шага в пользовательской
программе нельзя, это может привести к тому, что SFC – диаграмма будет работать совсем не так
как это следует из её графического представления. На самом деле запись не запрещена,
используется только при отладке.
СТАНДАРТНЫЕ SFC
Выше описанная техника настраивает на то, что изначально определяются шаги, которые
наполняются определённым содержимым в процессе работы над проектом. При использовании
МЭК-действий подход меняется. Сначала определяются действия (виды работ), которая должна
выполнить система, а затем составляется диаграмма в которой определяется их порядок и
взаимосвязь. Каждое действие сопоставляется одному или нескольким шагам. Причём
допустимо, что некоторое действие может допускаться в одном шаге и останавливаться в другом.
Возможно также, что действие должно будет закончить свою работу, независимо не от каких
шагов. Например: кабина лифта как минимум должна доехать до ближайшего этажа и выпустить
Лекция CoDeSys (Новиков).
пассажиров даже если дана команда на окончание работы. Действие на SFC-диаграмме
показываются справа у шага и привязываются к нему графически.
И ЕЩЁ ОДИН РИСУНОК
Так в данном примере в шаге Cooling (охлаждение) и шаге Drying (сушка) используется действие
AirCondi~on (воздушный обдув). Видно, что действие не принадлежит конкретному шагу, является
отдельным самостоятельным программным элементом. Идентификаторы должны быть
уникальными в пределах одного компонента POU и не должны совпадать с именами шагов и
переходов.
КЛАССИФИКАТОРЫ ДЕЙСТВИЙ
Прямоугольник, отображающий действие содержит в левой части специальное поле –
классификатор действий. Классификатор определяет способ влияния активного шага на данное
действие. Возможны следующие классификаторы:
.N – несохраняемое действие, данное действие выполняется в каждом рабочем цикле,
пока активен шаг.
РИСУНОК
P – импульс. Действие выполняется один раз при активации шага и один раз при
деактивации.
РИСУНОК
S - Сохраняемое действие. Действие активируется и остаётся активным до сброса.
Действие продолжает выполняться в каждом цикле даже тогда, когда шаг уже неактивен.
РИСУНОК
R – сброс. Действие деактивируется.
РИСУНОК
L – ограниченное по времени. Действие инициализируется вместе с шагом и остаётся
активным на заданное время, но не дольше чем шаг. На рисунке показано два возможных
случая. В первом действие деактивируется по истечению времени. Во втором по
деактивации шага.
РИСУНОК
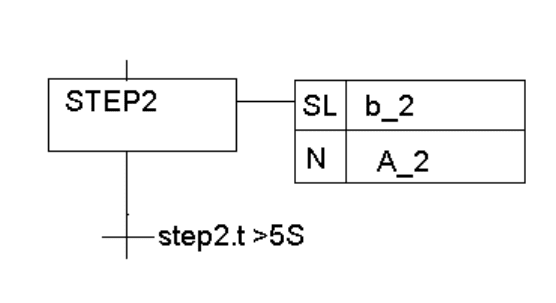
SL – ограниченное и сохраняемое по времени. Действие активируется вместе с шагом и
остаётся активным в заданное время вне зависимости от активности шага. Действие
можно деактивировать досрочно из другого шага с классификатором R.
РИСУНОК
Лекция CoDeSys (Новиков).
D – отложенное действие. Действие активируется через заданное время после активации
шага и остаётся активным, пока шаг активен. Если шаг окажется активным меньше
заданного времени, то действие активировано не будет.
РИСУНОК
DS – отложенное и сохраняемое действие. Действие активируется через заданное время
после активации шага и остаётся активным до сброса. Если шаг активен меньше заданного
времени – действие не будет активировано. При параллельном выполнении сброса в
процессе отсчёта времени (из другого шага с классификатором R) действие активироваться
не будет.
РИСУНОК
SD – сохранённое и отложенное действие. Действие активируется через заданное время
после активации шага, даже если шаг уже не активен. Но если в процессе активации
выполнить сброс (в другом шаге с классификатором R) то активация не произойдёт.
РСИУНОК
Активированное действие остаётся активным до сброса. Классификаторы L, D, SD, DS и SL требуют
указание константы времени в формате Time. Как видно из временных диаграмм – каждое
активное действие выполняется ещё один раз уже после деактивации. Это не обходимо для того
чтобы действия могли отработать потерю активности и выполнить некоторые завершающие
операции.
Пример:
IF STEP1.X THEN iC:=iC+1; (*счётчик активности*)
ELSE
iD:=iD+1; (* счётчик деактивации*)
END_IF
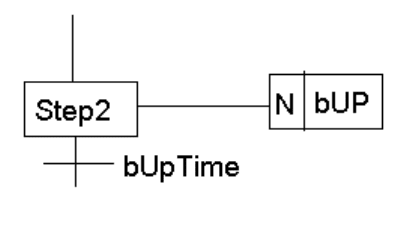
ДЕЙСТВИЕ ПЕРЕМЕННОЕ
Действие стандартного SFC не обязательно должно что-либо делать. В качестве имени действия
можно использовать логическую переменную, внутреннюю или внешнюю. Переменное действие
применяется для синхронизации различных ветвей диаграммы или программы всего проекта.
Пример:
bUP AT%QX2.2:bool;
Переменная bUP соответсвует Классификатор работает. Такая переменная гораздо полезней чем
может показаться на первый взгляд. Вполне вероятно, что необходимо управлять одним
дискретным выходом, а вся логика уже прописана в SFC – диаграмме, поэтому никакого
дополнительного программирования здесь не нужно.
МЕХАНИЗМ УПРАВЛЕНИЯ ДЕЙСТВИЕМ
Лекция CoDeSys (Новиков).
Классификаторы определяют достаточно сложные возможности управления работы действия.
Очевидно что действие как и шаг имеет внутреннюю память и логику управления. Для реализации
управления в каждое действие неявно включается экземпляр функционального блока
SFCAc~onControl. ФБ – имеет входы соответствующие классификаторам. Если какой-либо шаг
включает действие, то это приводит к присваиванию логической единицы соответствующему
входу SFCAc~onControl. После отработки всех активных шагов по состоянию выхода Q система
исполнения принимает решение о необходимости вызова данного действия. Все действия
вызываются один раз в рабочем цикле. Порядок выполнения действий зависит от реализации
исполнения. Интерфейс ФБ SFCAc~onControl описан в библиотеке IESFC.lib в ней входы S и R
обозначены через Sнулевое и Fнулевое (это сделано для исключения конфликтов с ключевыми
словами). В CoDeSys есть лазейка позволяющая получить доступ к блоку управления действия.
SFCAc~onControl доступен в каждом действии.
Пример:
IF A3.AC.Q
…….
END_IF
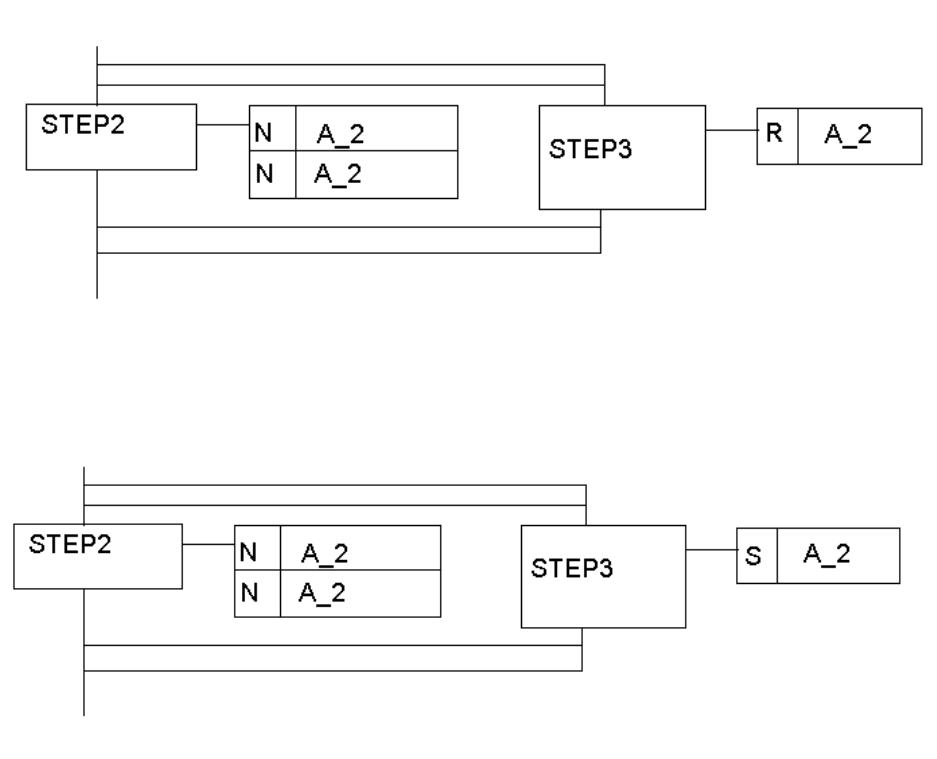
Пример:
Рисунок 1: вызов действия А_2 происходит дважды и один раз запрещается
Как отражено ранее вызвать действие в каждом цикле можно вызвать один раз. Поэтому пример
рисунка 2 абсолютно бессмысленный, т.к. действие вызывается трижды, но выполнено будет
только один раз в рабочем цикле. На рисунке1 действие вызывается дважды затем сбрасывается.
В результате выполнено оно не будет. (При параллельной обработке шаги выполняются слева
направо, условно, одновременно).
ВНУТРЕННЯЯ ПЕРЕМЕННАЯ ШАГА И ДЕЙСТВИЯ
Лекция CoDeSys (Новиков).
Для каждого МЭК – шага неявно объявлена структура из двух доступных по чтению переменных.
Первая переменная – X:bool – является признаком активности шага. По смыслу она равноценна
логической переменной шага «StepName». Логическая единица является признаком активности.
Вторая переменная типа Time – T: Time – указывет время активности шага. Доступ к переменной
возможен через имя шага и точку. Переменные шага можно использовать в условных переходах.
Пример:
ФУНКЦИОНАЛЬНЫЕ БЛОКИ И ПРОГРАММЫ SFC
Применение SFC в объёмных компонентах позволяет сократить время выполнения и
соответственно время реакции системы. При помощи шагов монолитная программа разбивается
на короткие фрагменты, выполняемые в разных рабочих циклах ПЛК. Реализация ФБ в SFC
отсутствуют первая и последняя команды. Оператор RETURN не используется. Программа как бы
не имеет конца. Каждый вызов SFC_POU равносилен выполнению одного цикла. Что, конкретно
будет выполнять POU зависит от предыдущего состояния. Принудительно вернуть компонент в
начальное состояние можно только путём сброса ПЛК. Принудительная активация начального
шага в SFC не означает автоматический сброс компонента. Это приводит только к тому, что кроме
текущих активных действий активным становится и начальный шаг. Начальный шаг не содержит
скрытых действий, не запрещает другие шаги и действия.
Пример:
В данном примере параллельная ветвь содержит пустой шаг S4 затем она передаёт управление
начальному шагу. Другая параллельная ветвь Step2 – S3 зациклена сама на себя. Она продолжает
работать независимо ни от чего. Отработка реакции на все необходимые события включая
экстренные обязательно должна быть предусмотрена в SFC явным образом. Перевод системы в
начальное или в безопасное состояние предусматривает для ПЛК установку заданного положения
исполнительных механизмов и управления ими. Нажатия аварийной клавиши или отработка
аварийного сигнала, который обесточит исполнительные механизмы должно корректно
отрабатываться программным обеспечением. Установка и поддержание безопасного состояния
системы – это даже более сложная работа, чем обычное функционирование. В этих случаях не
рекомендуется использовать программный сброс ПЛК (даже в стандартных библиотеках такая
функция отсутствует). В CoDeSys экстренный сброс программ и ФБ всё же разрешён. Проблема
решается с помощью специальных лагов SFC-init и Sfc –reset.
ЯЗЫК IL
Текст на Il – список последовательных инструкций. Каждая запись в отдельной строке. Инструкция
может содержать 4 поля, разделённые пробелом или горизонтальной табуляцией. Метка не
является обязательной. Ставится только там, где нужна. Оператор присутствует обязательно,
операнд – по необходимости. Комментарий – не обязательное поле, ставится в конце строки.
Ставить комментарий между полями инструкций нельзя. Для лучшего восприятия колонки полей
выравнивают.
ПРИМЕР: