Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Service Robots and Automation for the Disabled/Limited 84.3 Application Example: the Robotic Home Assistant Care-O-bot 1495
a) b) c)
Model of arm
Model of head
Model of table
Velocity vectors
Robot torso
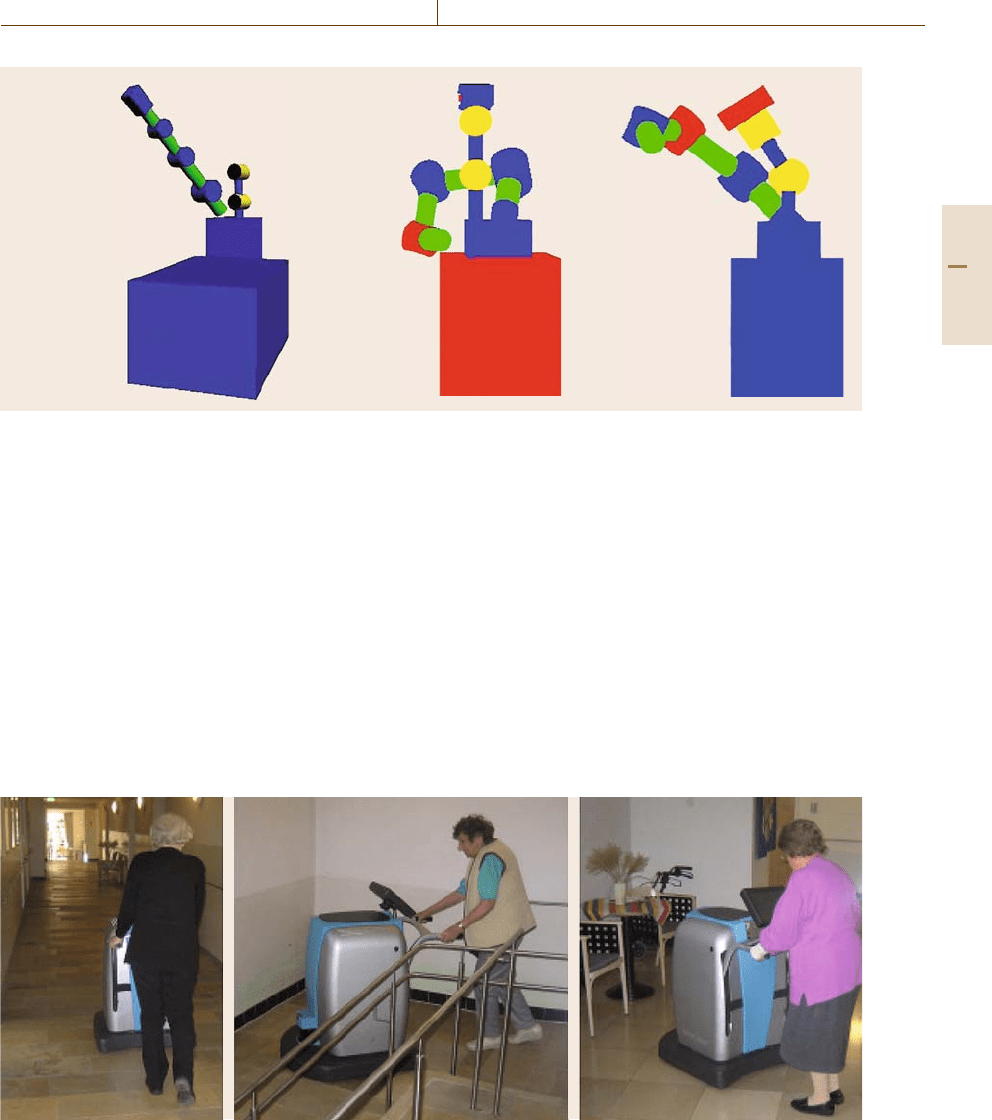
Fig. 84.12a–c Velocity vectors of moving parts (a), detection of potential collisions between different parts of the robot
illustrated in red color
(b,c)
a collision-free trajectory for moving the manipulator to
grasp a previously detected object. The entire obstruc-
tion model is used as the basis for the path search. As
a result the determined path isguaranteed to be collision
free with respect to both the robot’s components and
also the robot’s environment. The implemented method
is based on path planning with rapidly exploring ran-
dom trees[84.76], and smoothing of the calculated path.
User Interface
In order to enable all users to operate Care-O-bot
without difficulties, the user interface must be suitable
even for users without any prior technical knowl-
Fig. 84.13 Field tests of the walking aid function
edge [84.77]. For simple man–machine communication
without misunderstanding, multiple sensing channels
(speech, haptics, and gestures) are addressed. Com-
manding the robot, for example, is done by speech
input, gestures, and touchscreen. The necessary feed-
back about the robot system state is given by speech
output and graphical presentations on the monitor. The
user interface of Care-O-bot II is implemented on
a handheld, lightweight control panel, which the user
can retain – even while the robot moves around. Care-
O-bot 3 provides a moveable tray to pass objects to
and from the user. A touchscreen integrated in that tray
provides the necessary visual input and output.
Part I 84.3

1496 Part I Home, Office, and Enterprise Automation
Fig. 84.14 Care-O-bot 3 fetching a drink in the kitchen and serving drinks to visitors
84.3.3 Applications
Walking Aid Function
Using the walking supporters attached to the rear of
Care-O-bot II,the robotcan serve as an intelligent walk-
ing aid able to lead a user to a given target [84.78].
The velocity of the robot during guidance is adjusted to
the walking velocity of the user by measuring the user
forces applied to the handles. Several user tests in el-
derly care facilities have proven the capabilities of the
guidance system. Figure 84.13 displays some elderly
users during the latest field tests. In order to enable
a clear view ahead, the sensor head and manipulator of
the robot was taken off for the walking aid tests.
Dependable Execution of Fetch and Carry Tasks
The fetch and carry capabilities of Care-O-bot II and
Care-O-bot 3 have been tested and evaluated on several
occasions during fairs and exhibitions. A sample home
environment containing different furniture and objects
is used to test, demonstrate, and evaluate the perfor-
mance of the robots. They are already able to detect,
grasp, and move different objects in the environment or
bring them to the user (Figure 84.14). Care-O-bot II has
also been tested in a real home environment. The robot
was ordered to get a drink from the kitchen. It was able
to grasp a box of juice from the refrigerator, and a glass
from the kitchen shelf and place it on the living room ta-
ble. Direct user interaction was tested by handing a box
of pills to the user.
The tests and demonstrations have proven the de-
pendability of the fetch and carry taskexecution system:
the underlying execution frameworkran to our complete
satisfaction. Error detection and error recovery of the
framework enabled detection and grasping of objects to
function without any failures.
84.4 Application Example: the Bionic Robotic Arm ISELLA
84.4.1 Service Robot Arms
and Drive Technology
Robot arms of servicerobots may also act as a paradigm
for artificial limbs and rehabilitation aids. Some key
features are:
•
Low ratio of weight to payload
•
High energy efficiency and applicability to battery-
powered operation
•
Moderate costs of manufacturing and materials in
series production.
Conventional arms of service robots have a geared
electrical motor for each joint as drives, sometimes built
with a sleeve shaft as a cable duct for other drives
and the gripper. Based on this layout it was possi-
ble to bring down the ratio of weight to payload to
approximately 3 : 1to1: 1 with designs highly op-
timized in weight and careful selection of materials
Part I 84.4
Service Robots and Automation for the Disabled/Limited 84.4 Application Example: the Bionic Robotic Arm ISELLA 1497
a)
b)
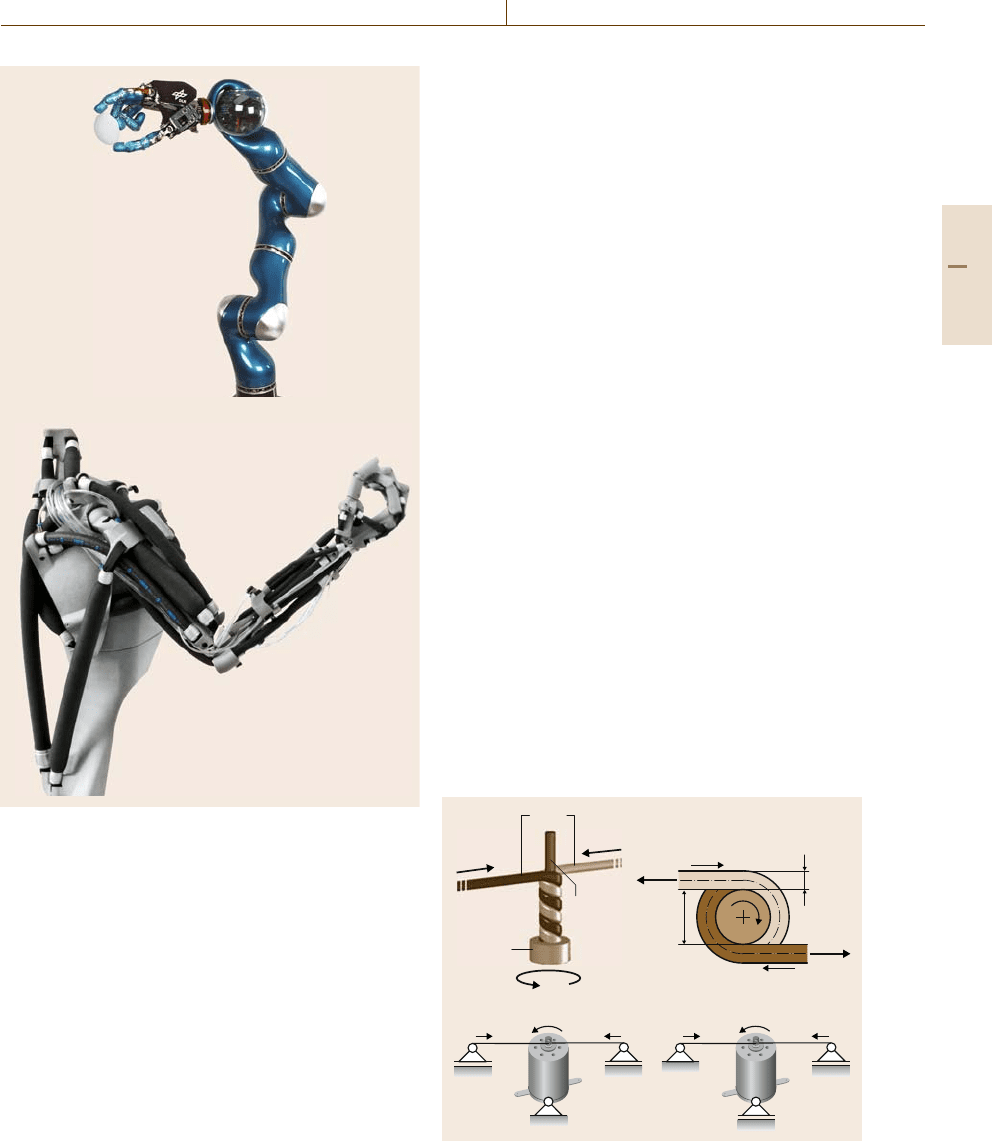
Fig. 84.15a,b Robot arms with high ratio of weight to
payload:
(a) lightweight arm (courtesy of DLR, Wessling,
Germany),
(b) bionic robot arm with fluidic muscles (cour-
tesy of Festo AG, Germany)
(Fig.84.15). However, costs of production, especially
of their high-quality and high-precision drive units, still
exceed what may be attractive and affordable for private
users, even for medical devices. Moreover, prosthe-
ses should have properties similar to their biological
counterparts rather than properties of industrial robots.
Among others, these properties are variable stiffness
of the joints, often smaller ranges of the joint angles,
and less precision in forward-controlled positioning of
the end-effector. These properties may be easier to
achieve with a bionic-oriented approach of mechanical
and kinematic design. Secondly, a different approach
to drive technology is required, which may be more
suitable for variable stiffness and – above all – less
expensive.
Something that may be thought of immediately is
using artificial or technical muscles, i. e., technical ac-
tuators with properties of biological muscles. In recent
years and decades a number of different types have
been proposed and developed. Most of them are in
a state of research, although some are already commer-
cially available. Details and comparisons can be found
in several publications [84.79,80]. The pneumatic mus-
cle, also known as the McKibben muscle [84.81], is
a rubber tube covered with a braided tissue that con-
tracts when pressurized. Since some of its properties
are different from those of pneumatic cylinders, it is
more advantageous for some industrial applications,
and has also been used in some bionic robot applica-
tions [84.82,83]. Figure 84.15b shows Airic’s arm – an
experimental bionic arm by Festo AG, designed like the
human arm and shoulder. However, pneumatic systems
generally have low energy efficiency compared to elec-
tric drives, and also motion control requires precision
valves and pneumatic regulators. Another group of ar-
tificial muscles is shape-memory alloys (SMA), which
change their shape with changing temperature. They
are sparsely used for bionic robot applications [84.84].
Electroactive polymers (EAP) are materials with piezo-
electric properties. Several hundreds of such polymers
are known and some seem promising for use as techni-
cal muscles [84.85,86]. A few demonstrative examples
can be found in the field of robotics [84.87]. Beyond
these there are some other principles of technical mus-
Cord
Shaft
Cord
fastener
a)
b)
F
c
d
s
M
s
,
ω
s
d
c
υ
c
/2
υ
c
/2
F
c
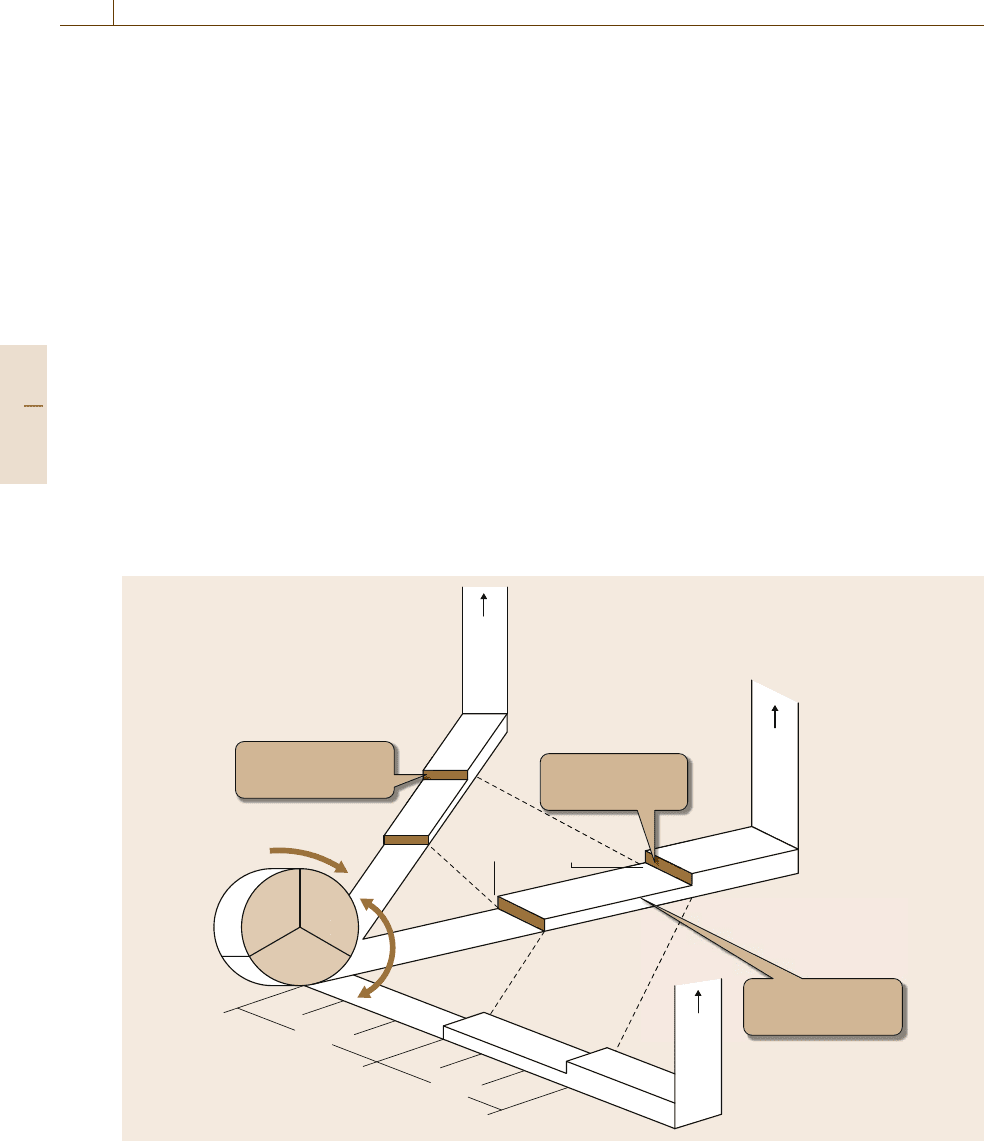
Fig. 84.16 (a) Details of the DOHELIX mechanism,
(b) setup of the DOHELIX muscle
Part I 84.4
1498 Part I Home, Office, and Enterprise Automation
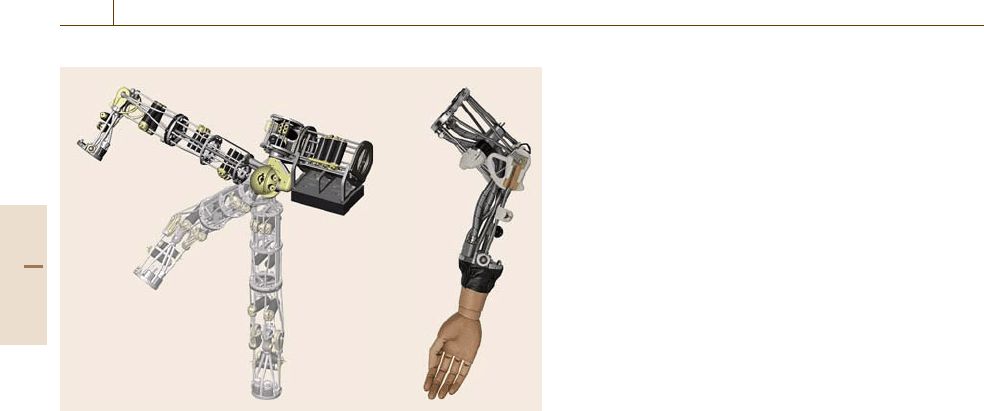
a) b)
Fig. 84.17a,b The ISELLA robot arm in different poses, assembly
of elbow part with a dummy hand
cles [84.88, 89], but these are also in the state of
research.
84.4.2 The DOHELIX Muscle
A recent development of Fraunhofer IPA, Germany in
the field of artificial muscles may overcome all disad-
vantages of the above-mentioned drives and may be
most suitable for battery-powered articulated mecha-
nisms, including consumer service robot arms, pros-
thetic devices, and rehabilitationaids. Thisdevelopment
was introduced in [84.90] and [84.91], and is shown
in Fig.84.16a. The sketch in Fig. 84.16a illustrates parts
and functionality: a highly flexible and high-strength
cord is attached to a turning shaft with a cord fas-
tener and it coils onto the thin shaft while pulling
both ends of the cord towards the shaft – the mus-
cle is contracting. Using a shaft with a small diameter,
high contraction forces with small torques as well
as low contraction velocities can be obtained. The
torque and rotational speed can be produced by small-
size electrical motors and the force can be taken by
high-performance plaited cords such as those used in
sailing, fishing, and kiting. However, this only works
if the cord coils in a single layer, forming a double
helix as shown in Fig.84.16a. For better illustra-
tion, the left and right part of the cord are shown
in different greyscale, although it is a single cord.
The double-helix shape is the origin of the name
DOHELIX.
Figure 84.16b shows how the mechanism may be set
up in practice, using a simple electrical motor to drive
the shaft. Either the motor or one cord end is fixed; the
other two assembly points must be linearly moveable.
This is a muscle-like actuator in many respects: It can
only contract and must be stretched externally, it may
be repeatedly overloaded by a multiple of its nominal
power, only the motor-coils must not overheat and need
time to rest and to regenerate. This is similar to its bio-
logical counterpart – a skeletal muscle.After exhausting
physical work or sports activity we need time to rest and
regenerate our muscles. Unlike gearbox drive solutions,
the DOHELIX muscle is only built of a standard motor,
a standard cord, and some simple mechanical parts. It is
scalable in many respects – size, speed, power, quality,
and price.
84.4.3 The ISELLA Robot Arm
When using DOHELIX muscles to design a robot arm,
there will be some significant differences to conven-
tional designs, as shown in Fig.84.15a. Figure 84.17
shows a full design study of the human-arm-like bionic
robot arm ISELLA in different poses: hanging down
straight and lifted to the side with the elbow bent. It
consists of a total of ten DOHELIX muscles, providing
a flexor and an extensor for each articulated joint, four
situated in the elbow and six in the upper arm. ISELLA
is an abbreviation for intrinsically safe lightweight low-
cost arm. Additional safety compared to conventional
design is a consequence of the fact that a single joint
only moves with coordinated control of at least two
drives. Failure of a single drive control loop is very un-
likely to produce uncontrolled motion of the entire arm,
since the counterpart of the malfunctioning drive will
counteract the motion, trying to maintain the desired
joint angle.
Like a human arm without the wrist, ISELLA has
five degrees of freedom. The DOHELIX muscles are
composed of direct-current (DC) motors and small-ratio
planetary gearboxes. With some muscles there are two
or three drives in parallel to multiply power while using
the same type of motor, cord, and other parts.The elbow
part of ISELLA is shown in Fig. 84.16b with a dummy
hand attached.
Part I 84.4
Service Robots and Automation for the Disabled/Limited References 1499
84.5 Future Challenges
The number of assistive devices required will increase
with the continuously increasing number of elderly per-
sons. At the same time, the budget available for such
assistive tools will be extremely limited. Therefore, one
main effort of future developments will be to obtain
maximum functionality at minimum cost. One solution
could be the use of components already established in
other markets such as sensors or motors used in the
car industry or industrial applications that are already
available at low prices.
Another target for future developments is the de-
sign of new human–machine interfaces in order to
enable intuitive interaction with technical devices. Cur-
rent developments deal with speech interaction, gesture
recognition or other human-like communication chan-
nels. Another aspect for assistive service robots is their
ability to continuously learn new tasks. Current devel-
opments deal with autonomous robots exploring their
environment autonomously or ways of instructing new
tasks to a service robot by demonstration or leading it
by the hand.
A third important aspect of future developments is
the issue of safety. Whereas for mobile robots with-
out manipulation capabilities, safety regulations can
be derived from industrial applications, specifically the
rules for safe navigation of autonomous guided vehicles
(AGVs), no rules are yet available for safe manipula-
tion among humans. Currently available products such
as the Manus ARM solve this problem by limiting the
power of the motors, however, at the cost of not being
able to lift heavy objects. In order to provide enhanced
support, new sensors have to be applied to supervise
the workspace of mobile robot arms in direct interaction
with humans.
References
84.1 Statistisches Bundesamt Deutschland: 11. koor-
dinierte Bevölkerungsvorausberechnung (2006)
www.destatis.de (last accessed February 1, 2007)
84.2 N.I. Katevas: Mobile robots in healthcare: the past,
the present and the future. In: Mobile Robots in
Healtcare, ed. by N.I. Katevas (IOS, Athens 2001)
pp. 1–16
84.3 B. Siciliano, O. Khatib (Eds.): Springer Handbook of
Robotics (Springer, Berlin, Heidelberg 2008)
84.4 H.F.M. van der Loos, D.J. Reinkensmeyer: Reha-
bilitation and health care robotics. In: Springer
Handbook of Robotics, ed. by B. Siciliano, O. Khatib
(Springer, Berlin, Heidelberg 2008)
84.5 C. Huang, G. Wasson, M. Alwan, P. Sheth,
A. Ledoux: Shared navigational control and user
intent detection in an intelligent walker, Proc. AAAI
Fall 2005 Symp. (EMBC) (2005)
84.6 G. Lacey, K.M. Dawson-Howe: Personal adaptive
mobility aid for frail and elderly blind people,Tech.
Rep. TR-CS-95-18 (Comp. Science Dept. School of
Engineering, Trinity College Dublin 1995)
84.7 Y. Hirata, A. Hara, A. Muraki, K. Kosuge: Passive-
type intelligent walker RT walker, Proc. IEEE Int.
Conf. Robot. Autom. (Orlando 2006)
84.8 D. Rodríguez-Losada, F. Matía, A. Jiménez,
R. Galán, G. Lacey: Guido, the robotic smart walker
for the frail visually impaired, 1st Int. Congr. Do-
motics Robot. Remote Assistance All – DRT4all 2005
(Act Book, Madrid 2005) pp. 155–169
84.9 N. Nejatbakhsh, K. Kosuge: User-environment
based navigation algorithm for an omnidirectional
passive walking aid system, Proc. 9th Int. Conf.
Rehab. Robot. (Chicago 2005)
84.10 J. Glover, D. Holstius, M. Manojlovich, K. Mont-
gomery, A. Powers, J. Wu, S. Kiesler, J. Matthews,
S. Thrun: A robotically-augmented walker for
older adults, Tech. Rep. CMU-CS-03-170 (Carnegie
Mellon Univ. Comp. Science Dep., Pittsburgh
2003)
84.11 H.M. Shim, E.H. Lee, J.H. Shim, S.M. Lee, S.H. Hong:
Implementation of an intelligent walking assistant
robot for the elderly in outdoor environment, Proc.
9th Int. Conf. Rehab. Robot. (Chicago 2005)
84.12 S. Egawa, I. Takeuchi, A. Koseki, T. Ishii: Electrically
assisted walker with supporter-embedded force-
sensing device. In: Advances in Rehabilitation
Robotics, Lecture Notes in Control and Informa-
tion Science, Vol. 306 (Springer, Berlin, Heidelberg
2004) pp. 313–322
84.13 H. Yu, M. Spenko, S. Dubowsky: An adaptive shared
control system for an intelligent mobility aid for
the elderly, Auton. Robots 16(15), 53–66 (2003)
84.14 A. Morris, R. Donamukkala, A. Kapuria, A. Steinfeld,
J. Matthews, J. Dunbar-Jacobs, S. Thrun: A robotic
walker that provides guidance, Proc. IEEE Int. Conf.
Robot. Autom. (ICRA) (Taipei 2003)
84.15 P. Médéric, V. Pasqui, F. Plumet, P. Bidaud: Elderly
people sit to stand transfer experimental analysis,
Proc. 8th Int. Conf. Climb. Walk. Robots (CLAWAR
2005) (2005) pp. 953–960
84.16 C. Bühler, H. Heck, J. Nedza, R. Wallbruchr: Eval-
uation of the MOBIL walking and fifting aid. In:
Part I 84
1500 Part I Home, Office, and Enterprise Automation
Assistive Technology Added Value to the Quality
of Life, ed. by C. Marincek, C. Bühler, H. Knops,
R. Andrich (IOS, Washington 2001) pp. 210–215
84.17 O. Chuy Jr., Y. Hirata, Z. Whand, K. Kosuge:
Approach in assisting a sit-to-stand movement us-
ing robotic walking support system, IEEE/RSJ Int.
Conf. Intell. Robots Syst. (Beijing 2006) pp. 4343–
4348
84.18 A.M. Sabatini, V. Genovese, E. Pacchierotti: A mo-
bility aid for the support to walking and object
transportation of people with motor impairments,
Proc. IEEE/RSJ Intl. Conf. Int. Robots Syst. (2002)
84.19 R.A. Cooper: Intelligent control of power wheel-
chairs,Eng.Med.Biol.Mag.14(4), 423–431 (1995)
84.20 S.P. Levine, D.A. Bell, L.A. Jaros, R.C. Simpson,
Y. Koren, J. Borenstein: The NavChair assistive
wheelchair navigation system, IEEE Trans. Rehab.
Eng. 7(4), 443–451 (1999)
84.21 G. Bourhis, O. Horn, O. Habert, A. Pruski: An
autonomous vehicle for people with motor disabil-
ities, IEEE Robot. Autom. Mag. 8(1), 20–28 (2001)
84.22 S.P. Parikh, V. Grassi Jr., V. Kumar, J. Okamoto Jr.:
Incorporating user inputs in motion planning for
a smart wheelchair, IEEE Int. Conf. Robot. Autom.
(New Orleans 2004) pp. 2043–2048
84.23 E. Prassler, J. Scholz, P. Fiorini: A robotic wheelchair
for crowded public environments, IEEE Robot. Au-
tom. Mag. 8(1), 38–45 (2001)
84.24 H.A. Yanco: Shared User-Computer Control of
a Robotic Wheelchair System. Ph.D. Thesis (Mas-
sachusetts Institute of Technology, Cambridge
2000)
84.25 R.A. Brooks: A Robust Layered Control System for
a Mobile Robot (A.I.Memo864,Massachusetts
Institute of Technology, Artificial Intelligence Lab-
oratory 1985)
84.26 T. Röfer, A. Lankenau: Ein Fahrassistent für ältere
und behinderte Menschen, Auton. Mobile Syst. 15,
334–343 (1999), in German
84.27 G. Pires, R. Araujo, U. Nunes, A.T. de Almeida:
ROBCHAIR – a powered wheelchair using a
behaviour-based navigation, 5th Int. Workshop
Adv. Motion Control (Coimbra 1998) pp. 536–541
84.28 D. Vanhooydonck, E. Demeester, M. Nuttin, H. Van
Brussel: Shared control for intelligent wheelchairs:
an implicit estimation of the user intention,
ASER’03 1st Int. Workshop Adv. Serv. Robot. (2003)
pp. 176–182
84.29 H. Hoyer: The OMNI wheelchair, Serv. Robot Int. J.
1(1), 26–29 (1995)
84.30 Toyota Motor Corporation: Robot Technology,
http://www.toyota.co.jp/en/tech/robot/ (last ac-
cessed February 17, 2009)
84.31 S. Shoval, I. Ulrich, J. Borenstein: NavBelt and the
GuideCane, IEEE Robot. Autom. Mag. 10(1), 9–20
(2003)
84.32 M. Montemerlo, J. Pineau, N. Roy, S. Thrun,
V. Verma: Experiences with a mobile robotic guide
for the elderly, Proc. AAAI Natl. Conf. Artif. Intell.
(2002)
84.33 B. Graf, O. Barth: Entertainment robotics: exam-
ples, key technologies and perspectives, Robots in
Exhibitions, Proc. Workshop WS9 (Lausanne 2002)
84.34 H.F.M. van der Loos, J.J. Wagner, N. Smaby,
K.S. Chang, O. Madrigal, L.J. Leifer, O. Khatib:
ProVAR assistive robot system architecture, Proc.
ICRA (Detroit 1999) pp. 741–746
84.35 T. Jones: RAID – toward greater independence in
the office and home environment, Proc. 6th Int.
Conf. Rehab. Robot. (ICORR’99) (Stanford 1999)
84.36 Rehab Robotics Ltd: Handy1, http://ourworld
compuserve.com/homepages/rehabrobotics/
Hand1.htm (last accessed February 17, 2009)
84.37 Exact Dynamics BV: ARM: Assistent Robot Manipu-
lator, http://www.exactdynamics.nl/ (last accessed
February 17, 2009)
84.38 American Honda Motor Co. Inc.: ASIMO, http://asimo.
honda.com (last accessed February 17, 2009)
84.39 Kawada Industries, Inc.: Humanoid Robot HRP-2
“Promet”, http://www.kawada.co.jp/global/ams/
hrp_2.html (last accessed February 17, 2009)
84.40 Sarcos Inc.: High-performace humanoid robot,
http://www.sarcos.com/telespec.atr.html (last ac-
cessed February 17, 2009)
84.41 P. Dario, E. Guglielmelli, C. Laschi, G. Teti (SSSA):
MOVAID: a personal robot in everyday life of dis-
abled and elderly people, Technol. Disabil. J. 10,
77–93 (1999)
84.42 R. Bischoff: HERMES – a humanoid experimen-
tal robot for mobile manipulation and exploration
services. Video Proc, IEEE Int. Conf. Robot. Autom.
ICRA ’01 (Seoul 2001), III–1
84.43 Universität Karlsruhe, Institut für Technische In-
formatik: SFB 588 Humanoide Roboter – Ler-
nende und kooperierende multimodale Roboter,
http://www.sfb588.uni-karlsruhe.de (last accessed
February 17, 2009)
84.44 Fraunhofer IPA: Care-O-bot, http://www.care-o-
bot.de (last accessed February 17, 2009)
84.45 Hitachi, Ltd.: Robotics, http://www.hitachi.com/rd/
research/robotics.html (last accessed February 17,
2009)
84.46 Yaskawa Electric Corporation: Yaskawa develops a
service robot “SmartPal V (SmartPal Five)”. Press
release November 28, 2007
http://www.yaskawa.co.jp/en/newsrelease/2007/
04.htm
84.47 Fujitsu Frontech Ltd.: Fujitsu Service Robot (enon),
http://www.frontech.fujitsu.com/en/forjp/robot/
servicerobot/ (last accessed February 17, 2009)
84.48 D.H. Plettenburg: Basic requirements for upper ex-
tremity prostheses: the WILMER approach, Proc.
20th IEEE Int. Conf. Eng. Med. Biol. Soc. 5, 2276–2281
(1998)
84.49 P. Berkelman, T. Lu, J. Ma, P. Rossi: Passive orthosis
linkage for locomotor rehabilitation, Proc. 10th Int.
Part I 84
Service Robots and Automation for the Disabled/Limited References 1501
Conf. Rehab. Robot. ICORR 2007 (Noordwijk 2007)
pp. 425–431
84.50 D. Odell, A. Barr, R. Goldberg, J. Chung, D. Rempel:
Evaluation of a dynamic arm support for seated
and standing tasks: a laboratory study of elec-
tromyography and subjective feedback, J. Ergon.
50(4), 520–535 (2007)
84.51 A.H.A. Stienen, E.E.G. Hekman, F.C.T. Van der Helm,
G.B. Prange, M.J.A. Jannink, A.M.M. Aalsma, H. Van
der Kooij: Freebal: dedicated gravity compensation
for the upper extremities, Proc. Int. Conf. Rehab.
Robot. ICORR 2007 (Noordwijk 2007) pp. 804–808
84.52 A. Jackson, P. Culmer, S. Makower, M. Leves-
ley, R. Richardson, A. Cozens, M. Mon Williams,
B. Bhakta: Initial patient testing of iPAM – a robotic
system for stroke rehabilitation, Proc. 10th Int.
Conf. Rehab. Robot. ICORR (Noordwijk 2007)
84.53 H. Hirai, R. Ozawa, S. Goto, H. Fujigaya, S. Ya-
masaki, Y. Hatanaka, S. Kawamura: Development
of an ankle-foot orthosis with a pneumatic passive
element, Proc. 15th IEEE Int. Symp. Robot Human
Interact. Commun. (RoMan 06) (2006) pp. 220–225
84.54 P. Beyl, J. Naudet, R. Van Ham, D. Lefeber: Me-
chanical design of an active knee orthosis for gait
rehabilitation, Proc. 10th Int. Conf. Rehab. Robot.
ICORR 2007 (Noordwijk 2007) pp. 100–105
84.55 Fraunhofer IPK: Rehabilitation Robotics,
http://www.ipk.fraunhofer.de/rehabrobotics (last
accessed February 17, 2009)
84.56 D. Surdilovic, R. Bernhardt, T. Schmidt, J. Zhang:
STRING-MAN: a novel wire-robot for gait reha-
bilitation, Advances in Rehabilitation Robotics.
In: Advances in Rehabilitation Robotics,Lecture
Notes in Control and Information Science, Vol. 306
(Springer, Berlin, Heidelberg 2004) pp. 413–426
84.57 L. Luenenburger, G. Colombo, R. Riener: Biofeed-
back for robotic gait rehabilitation, J. NeuroEng.
Rehab. 4(1), (2007), http://www.balgrist.ch/display.
cfm?id=101935
84.58 S.K. Banala, S.K. Agrawal, J.P. Scholz: Active leg
exoskeleton (alex) for gait rehabilitation of motor-
impaired patients, Proc. 10th Int. Conf. Rehab.
Robot. ICORR 2007 (Noordwijk 2007) pp. 401–407
84.59 Berkeley Robotics and Human Engineering Labora-
tory: BLEEX Project, http://bleex.me.berkeley.edu/
bleex.htm (last accessed February 17, 2009)
84.60 University of Tsukuba, Cybernics Laboratory: Robot
suit HAL (Hybrid Assistive Limb), http://sanlab.kz.
tsukuba.ac.jp/english/r_hal.php (last accessed Feb-
ruary 17, 2009)
84.61 Touch Bionics Inc. and Touch EMAS Ltd.: Touch-
bionics, http://www.touchbionics.com (last ac-
cessed February 17, 2009)
84.62 A. Kargov, C. Pylatiuk, S. Schulz, G. Bretthauer:
Modularly designed lightweight anthropomorphic
robot hand, Proc. IEEE Int. Conf. Multisens. Fusion
Integr. Intell. Syst. (Heidelberg 2006) pp. 155–159
84.63 Otto Bock HealthCare GmbH:
http://www.ottobock.de (last accessed February 17,
2009)
84.64 Ossur hf: POWER KNEE, http://www.ossur.com/
bionictechnology/powerknee (last accessed Febru-
ary 17, 2009)
84.65 K.B. Fite, T.J. Withrow, K.W. Wait, M. Goldfarb:
Liquid-fueled actuation for an anthropomorphic
upper extremity prosthesis, Proc. 28th Annual Int.
Conf. IEEE Eng. Med. Biol. Soc. EMBS ’06 (2006)
pp. 5638–5642
84.66 S.K. Au, J. Weber, H. Herr: Biomechanical design
of a powered ankle-foot prosthesis, Proc. 10th Int.
Conf. Rehab. Robot. ICORR 2007 (Noordwijk 2007)
pp. 298–303
84.67 F. Sup, A. Bohara, M. Goldfarb: Design and control
of a powered knee and ankle prosthesis, Proc. IEEE
Int. Conf. Robot. Autom. (2007) pp. 4134–4139
84.68 R.D. Schraft, C. Schaeffer, T. May: The concept of
a system for assisting elderly or disabled persons in
home environments, Proc. 24th IEEE Int. Conf. Ind.
Electron. Control Instrum. (IECON), Vol. 4 (Aachen
1998)
84.69 B. Graf, M. Hans, R.D. Schraft: Care-O-bot II –
development of a next generation robotic home
assistant, Auton. Robots 16(2), 193–205 (2004)
84.70 M. Hans, B. Graf, R.D. Schraft: Robotic home assis-
tant Care-O-bot: past-present-future, Proc. IEEE
Int. Workshop Robot Human Interact. Commun.
(RoMan) (Paris 2001) pp. 407–411
84.71 B. Graf: Dependability of mobile robots in direct
interaction with humans. In: Advances in Human-
Robot Interaction, Springer Tracts in Advanced
Robotics, Vol. 14 (Springer, Berlin, Heidelberg 2005)
pp. 223–239
84.72 J.-C. Latombe: Robot Motion Planning (Kluwer
Academic, Boston 1996)
84.73 T. Oggier, M. Lehmann, R. Kaufmann, M. Schweizer,
M. Richter, P. Metzler, G. Lang, F. Lustenberger,
N. Blanc: An all-solid-state optical range cam-
era for 3-D real-time imaging with sub-centimeter
depth resolution SwissRangerTM, Proc. SPIE 5249,
534–545 (2003)
84.74 M. Pontil, A. Verri: Support vector machines for 3-D
object recognition, IEEE Trans. Pattern Anal. Mach.
Intell. 20(6), 637–646 (1998)
84.75 J. Kubacki, W. Baum: Towards open-ended 3-D
rotation and shift invariant object detection for
robot companions, Proc. IEEE/RSJ Int. Conf. (IEEE,
Piscataway 2006) pp. 3352–3357
84.76 B. Rohrmoser, C. Parlitz: Implementation of
a path-planning algorithm for a robot arm,
Robotik 2002: Leistungsstand, Anwendungen, Vi-
sionen, Trends (Ludwigsburg 2002), ed. by R.
Dillmann et al., VDI/VDE-Gesellschaft Meß- und
Automatisierungstechnik (GMA) (VDI Düsseldorf
2002) VDI Rep. 1679, pp. 59–64
Part I 84
1502 Part I Home, Office, and Enterprise Automation
84.77 C. Parlitz, W. Baum, U. Reiser, M. Hägele: Intuitive
human–machine interaction and implementation
on an household robot companion. In: Human
Interface and the Management of Information.
Methods, Techniques and Tools in Information De-
sign, Lecture Notes in Computer Science, Vol. 4557
(Springer, Berlin, Heidelberg 2007) pp. 922–929
84.78 B. Graf, R.D. Schraft: Behavior-based path modi-
fication for shared control of robotic walking aids,
10th Int. Conf. Rehab. Robot. (Piscataway IEEE, No-
ordwijk 2007) pp. 317–322
84.79 C. Cocaud, A. Jnifene: Analysis of a two DOF anthro-
pomorphic arm driven by artificial muscles, Proc.
2nd IEEE Int. Workshop Haptic Audio Vis. Env. Appl.
(HAVE 2003) pp. 20–21
84.80 J.D.W. Madden, N.A. Vandesteeg, P.A. Anquetil,
P.G.A. Madden, A. Takshi, R.Z. Pytel, S.R. La-
fontaine, P.A. Wieringa, I.W. Hunter: Artificial
muscle technology: physical principles and naval
prospects, IEEE J. Ocean. Eng. 29(3), 706–728 (2004)
84.81 V. Nickel, J. Perry, A. Garrett: Development of useful
function in the seveerely paralyzed hand, J. Bone
Jt. Surg. 45A(5), 933–952 (1963)
84.82 I. Boblan, R. Bannasch, H. Schwenk, F. Priet-
zel,L.Miertsch,A.Schultz:Ahuman-likerobot
hand and arm with fluidic muscles: biologically
inspired construction and functionality. In: Em-
bodied Artificial Intelligence, Lecture Notes in
Artificial Intelligence, Vol. 3139 (Springer, Berlin,
Heidelberg 2004) pp. 160–179
84.83 Festo AG: Brochure Airacuda (Festo, Esslingen
2006), www.festo.com
84.84 C. Pfeiffer, K. DeLaurentis, C. Mavroidis: Shape
memory alloy actuated robot prostheses: initial
experiments, Proc. IEEE Int. Conf. Robot. Autom.,
Vol. 3 (1999) pp. 2385–2391
84.85 S. Arora, T. Gosh, J. Muth: Dielectric elastomer
based prototype fiber actuators, Sens. Actuators A:
Phys. 136(1), 321–328 (2006)
84.86 H.R. Choi, K. Jung, S. Ryew, J.D. Nam, J.C. Koo,
J. Jeon, K. Tanie: Biomimetic soft actuator: design,
modeling, control, and applications, IEEE/ASME
Trans. Mechatron. 10(5), 581–593 (2005)
84.87 K. Takagi, M. Yamamura, Z.W. Luo, M. Onishi,
S. Hirano, K. Asaka, Y. Hayakawa: Development
of a Rajiform swimming robot using ionic polymer
artificial muscles, Proc. IEEE/RSJ Int. Conf. Intell.
Robots Syst. (2006) pp. 1861–1866
84.88 T. Niino, S. Egawa, H. Kimura, T. Higuchi: Electro-
static artificial muscle: compact, high-power linear
actuators with multiplelayer structures, Proc. IEEE
Workshop Micro Electro Mechan. Syst. (1994)
84.89 K. Takemura, S. Yokota, K. Edamura: A micro artifi-
cial muscle actuator using electro-conjugate fluid,
Proc. IEEE Int. Conf. (2005)
84.90 H. Staab, A. Sonnenburg: Studies and guidelines
on the design of the DOHELIX technical muscle. In:
Robotics and Applications, IRA 2007,13thIASTED
Int. Conf. (Würzburg 2007) (ACTA Press, Calgary
2007)
84.91 H. Staab, A. Sonnenburg, C. Hieger: The DOHELIX-
muscle: a novel technical muscle for bionic robots
and actuating drive applications, Autom. Sci. Eng.
3rd IEEE Conf. (Scottsdale 2007) pp. 306–311
Part I 84

1503
Automation i
85. Automation in Education/Learning Systems
Kazuyoshi Ishii, Kinnya Tamaki
The information technology (IT)revolutionwhich
began in the latter half of the 20th century has
brought great changes to education and learning.
The spread of the Internet has made information
ubiquitous, changing the emphasis of education
from the transmission and acquisition of knowl-
edge to knowledge creation [85.1], and shifting the
focus from group to individual education. Since the
perspective for discussions of education systems
is moving from instructors to learners [85.2–4],
in place of education systems we adopt the
expression education/learning systems. When
considering the automation of education/learning
systems, along with the impact of information and
communications technology (ITC), the effects of
educational psychology and educational technol-
ogy cannot be ignored. This field overall is referred
to as instructional design (ID)[85.5]. This chap-
ter examines the history and present conditions of
automation in education/learning systems, cen-
tered on e-Learning, from the perspectives of
information and communication technologies and
instructional design. The chapter also introduces
two examples from the field of industrial en-
gineering and management systems concerning
projects to develop education/learning programs
to train Japanese manufacturing management
personnel. These examples are both ongoing
industry–government–academia collaboration
85.1 Technology Aspects of Education/
Learning Systems..................................1503
85.1.1 Overview
of Instructional Design (ID) ...........1503
85.1.2 Development History
and Present Conditions
of e-Learning .............................1507
85.2 Examples .............................................1511
85.2.1 Educational Programs
for Cyber Manufacturing
in Industrial Engineering
and Information Management......1511
85.2.2 The Case
of an Educational Program
for Manufacturing Managers
Using IT Jigs................................1518
85.3 Conclusions and Emerging Trends ..........1523
References ..................................................1524
projects aimed at the transmission and de-
velopment of Japanese manufacturing kaizen
(continuous improvement) knowhow and the
education and training of management personnel.
The chapter concludes with a summary of
future issues concerning the automation of ed-
ucation/learning systems and a list of reference
materials in related fields for readers who seek
further details.
85.1 Technology Aspects of Education/Learning Systems
85.1.1 Overview of Instructional Design (ID)
There has been a great deal of discussion regarding the
definition of instructional design (ID). (Refer to Martin
Ryder’s site [85.5] for a comprehensive review.) Here,
we introduce two definitions; the first one is from the
Applied Research Laboratory (ARL) at Penn State Uni-
versity [85.6]:
Instructional design as a process is the systematic
development of instructional specifications using
learning and instructionaltheory to ensure the qual-
Part I 85
1504 Part I Home, Office, and Enterprise Automation
ity of instruction. It is the entire process of analysis
of learning needs and goals and the development of
a delivery system to meet those needs. It includes
development of instructional materials and activi-
ties; and tryout and evaluation of all instruction and
learner activities. Instructional design as a disci-
pline is that branch of knowledge concerned with
research and theory about instructional strategies
and the process for developing and implementing
those strategies.
The other one is by Suzuki [85.9]:
ID refers to models and research which compile
methods to improve the results, efficiency and at-
tractiveness of educational activities as well as the
process of realizing learning assistance environ-
ments which apply such models and research.
ID design process models are generally divided
into the two categories: Action, design, development,
implementation, evaluation (ADDIE) models [85.10]
and rapid prototyping models [85.11, 12]. Rapid pro-
The first circle
Motivation for
learning
The second circle
Plan
Control
Implementation
Plan
Control
Implementation
Maintenance of the
status quo
Maintenance of the
status quo
Maintenance of the
status quo
Destruction of the status quo
(Revision of the standard)
Improvement of
efficiency
Improvement of
human values
Improvement of
social values
Plan
(P)
Imple-
mentation
(D)
Control
(C/A)
Knowledge
creation
Active
learning
Conservative
learning
Fig. 85.1 Concept model for learning activity to create new values based on management circle model (after [85.7,8],
[85.8], with permission from Interscience Enterprises Ltd., 2009)
totyping models are based on ADDIE models. ADDIE
models are general models for the management of ID
which grasp ID activities as a process of analysis, de-
sign, development, implementation, and evaluation. As
shown in Fig.85.1 [85.7, 8], the models are based on
aplan→ do → check/act (see) management circle
model, with the plan process subdivided into thirds.
In Fig.85.1, education/learning activities signify col-
laboration toward the creation of human value by each
individual and the creation of social value by enter-
prises and the community. We address the automation
of education/learningsystems assuming that theideal of
education/learning systems management is to continu-
ously create newand greatervaluein education/learning
activities.
Table 85.1 summarizes the education/learning sys-
tems design and operational methods of each process
under this model. This table is revised from models pre-
sented in Gagne [85.13]andAkahori [85.14], incorpo-
rating our own experience. We now proceed to explain
ID following the processes presented in this table. (See
the list of reference materials for further details.)
Part I 85.1