Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.


1485
Service Robot
84. Service Robots and Automation
for the Disabled/Limited
Birgit Graf, Harald Staab
The increasing number of elderly people is re-
sulting in increased demand for new solutions
to support self-initiative and independent life.
Robotics and automation technologies, initially
applied in industrial environments only, are start-
ingtomoveintooureverydaylivestoprovide
support and enhance the quality of our lives. This
chapter analyzes the needs of disabled or limited
persons and discusses possible tasks of new assis-
tive service robots. It further gives an overview of
existing solutions available as prototypes or prod-
ucts. Existing technologies to assist disabled or
limited persons can be grouped into stand-alone
devices operated by the user explicitly such as
robotic walkers, wheelchairs, guidance robots or
manipulation aids, and wearable devices that are
attached to the user and operated implicitly by
measuring the desired limb motion of the user
such as in orthoses, exoskeletons or prostheses.
Two recent developments are discussed in detail
as application examples: the robotic home assis-
tant Care-O-bot and the bionic robotic arm ISELLA.
One of the most important challenges for future
developments is to reduce costs in order to make
assistive technologies available to everybody. On
the technological side, user interfaces need to be
designed that allow the use of the machines even
by persons who have no technical knowledge and
that enable new tasks to be taught to assistive
84.1 Motivation and Required Functionalities 1486
84.2 State of the Art ....................................1486
84.2.1 Mobility Aids ............................. 1487
84.2.2 Guidance Robots ........................ 1489
84.2.3 Manipulation Aids ...................... 1490
84.2.4 Orthoses and Exoskeletons .......... 1491
84.2.5 Prostheses................................. 1492
84.3 Application Example:
the Robotic Home Assistant Care-O-bot..1493
84.3.1 History
of Care-O-bot Development ........ 1493
84.3.2 Key Technologies........................ 1494
84.3.3 Applications .............................. 1496
84.4 Application Example:
the Bionic Robotic Arm ISELLA ................1496
84.4.1 Service Robot Arms
and Drive Technology ................. 1496
84.4.2 The DOHELIX Muscle .................... 1498
84.4.3 The ISELLA Robot Arm .................. 1498
84.5 Future Challenges.................................1499
References ..................................................1499
robots without much effort. Finally, safe manip-
ulation of assistive robots among humans must
be guaranteed by new sensors and corresponding
safety standards.
In the last years, the percentage of elderly people
in our society has grown rapidly. Out of 82.5million
people living in Germany in 2005, according to
numbers from the German Federal Statistical Of-
fice, around 19% were seniors above 65years [84.1].
With this demographic development continuing, by
the year 2050 those above 65years will comprise
33–36% of Germany’s population. Similar numbers
are reported from other industrial nations all over
the world, in particular the USA and Japan. Many
disabilities come with age. In order to provide suf-
ficient support for the growing number of disabled
persons, new solutions to assist these people are re-
quired.
Part I 84
1486 Part I Home, Office, and Enterprise Automation
84.1 Motivation and Required Functionalities
Technical aids enable people in need of support and
care to live independently in their accustomed home
environments for a longer time. As not all homes are
suitable for installing intelligent home technologies as
described in Chap.83, mobile service robots able to
navigate and operate in existing homes without mod-
ifications to the environment provide a more flexible
solution. Such service robots not only fulfill the user’s
desire for independence and autonomy, but also help to
avoid the high costs of individual treatment in nursing
homes that might otherwise be necessary.
The task of a service robot or other automation
technologies for the disabled and limited is to provide
support and instructional help in a person’s daily life
and to promote self-initiative. The group of target users
for such new technologies includes:
•
Elderly and frail persons
•
Disabled persons (physically, psychically)
•
Severely sick persons (heart attack, plastered leg)
•
Chronically sick persons (diabetes, epilepsy)
•
Severely restrained persons (e.g., pregnancy).
Due to the fact that humans have for a long time
dreamt of an assistant to relieve them of difficult han-
dling tasks, the basic concept of service robots assisting
people in their daily life has been presented and their
functionalities been described long before they were
actually built. The requirements that a service robot
to assist the disabled must cope with and the corre-
sponding technical abilities can therefore be specified
precisely [84.2, 3]. Some of the most important tasks,
identified by a study done with elderly people and their
care-givers, are summarized below.
Household Tasks
•
Execute everyday jobs such as serving drinks, set-
ting the table, operating the microwave, simple
cleaning tasks
•
Fetch and carry objects, e.g., books, remote control,
medicine
•
Support in grasping, holding, and lifting objects and
tools
•
Control of the technical home infrastructure, e.g.,
heating system, air-conditioning, lights, windows,
doors, alarm system, etc.
Mobility Aid
•
Support for standing up from the bed or a chair
•
Controlled motion
•
Obstacle detection and guidance to a target.
Communication and Social Integration
•
Media management (videophone, TV, stereo, inter-
active media, etc.)
•
Daytime manager (daily routine, time for medicine,
etc.)
•
Communication with medial and public facilities
(physician, authorities, etc.)
•
Supervision of vital signs and emergency call
functionality.
84.2 State of the Art
In recent decades, and continuing to the present day,
service robots for the disabled and limited is an ac-
tive field of research and development, performed in
many countries throughout the world. Main research
is carried out at universities and research institutes,
covering abrought rangeof ideas,approaches, andtech-
nologies. The landscape of companies in this branch
seems to be twofold: on the one hand there are a few
large players, who have been providing orthopaedics
solutions in large numbers and for many years al-
ready, trying to introduce robotics into some of their
high-end products. On the other hand there are many
smaller high-technology companies, often launched by
researchers in this field, focusing on a few or a single
product solution.
This section provides a representative overview of
the stateof the art in thefield of assistiverobotic devices
for the disabled and limited. The following examples
may be understood as representatives of many more but
similar developments. For further insights one may re-
fer to proceedings of international conferences such as
those on Robotics and Automation (ICRA), Intelligent
Robots and Systems (IROS), Robotics and Applica-
tions (RA), and others that usually host large sessions
on assistive and rehabilitation robotics. The Interna-
tional Conference on Rehabilitation Robotics (ICORR)
Part I 84.2
Service Robots and Automation for the Disabled/Limited 84.2 State of the Art 1487
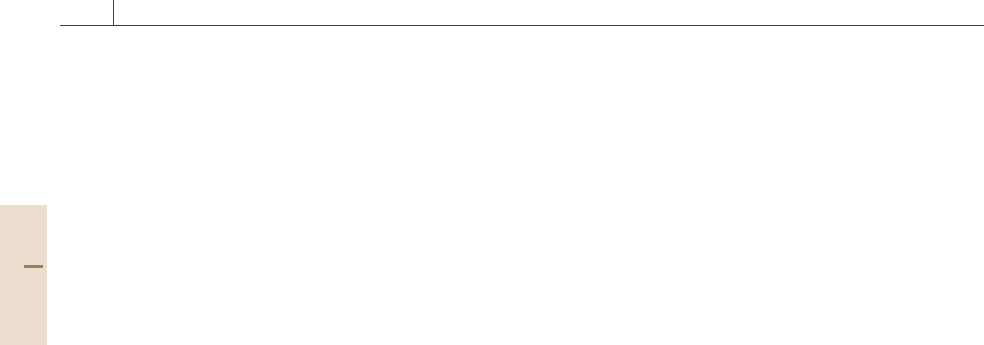
Service robots and automation
for the disabled
Stand-alone
devices
Wearable
devices
Robotic walkers
Fixed-platform manipulators
Portable-platform manipulators
Mobile autonomous robots with
manipulation skills
Robotic wheelchairs
Orthoses and exoskeletons
Prostheses
Mobility aids
Manipulation aids
Guidance robots
Fig. 84.1 Classification of service robots and automation for the disabled
is focused on this topic alone. Other sources may be
periodicals such as the quarterly International Journal
of Rehabilitation Research (IJRR), the monthly Inter-
national Journal of Therapy and Rehabilitation (IJTR),
the quarterly International Journal of Medical Robotics
and Computer Assisted Surgery, and others.
Existing service robots and assistive devices for the
disabled and limited can be grouped into stand-alone
devices, operated by the user explicitly such as robotic
walkers, wheelchairs, guidance robots or manipulation
aids, and wearable devices that are attached to the user
and operated implicitly by measuring the desired limb
motion of the user such as in orthoses, exoskeletons or
prostheses. A similar classification is found in [84.4].
Figure 84.1 summarized this classification of service
robots and assistive devices for the disabled andlimited.
The review of existing solutions startsin Sect. 84.2.1
with mobility aids such as robotic walkers or robotic
wheelchairs providing autonomous or semiautonomous
navigation capabilities. Section 84.2.2 describes ex-
isting guidance robots that may be applied for blind
persons or those suffering from dementia and other
mental disorders. From the technical viewpoint they
are quite similar to robotic walkers but the focus of
these systems is on cognitive, not physical support. Sec-
tion 84.2.3 describes existing manipulation aids that
may be either static, such as in desktop-mounted ma-
nipulators, or mobile when attached to a wheelchair or
to another kind of mobile platform.
Finally the group of wearable devices is reviewed.
Section 84.2.4 describes orthoses and exoskeletons for
users who need direct support in moving their limbs.
Prostheses worn by a user to replace amputated limps
are increasingly incorporating robotic features and are
reviewed in Sect. 84.2.5.
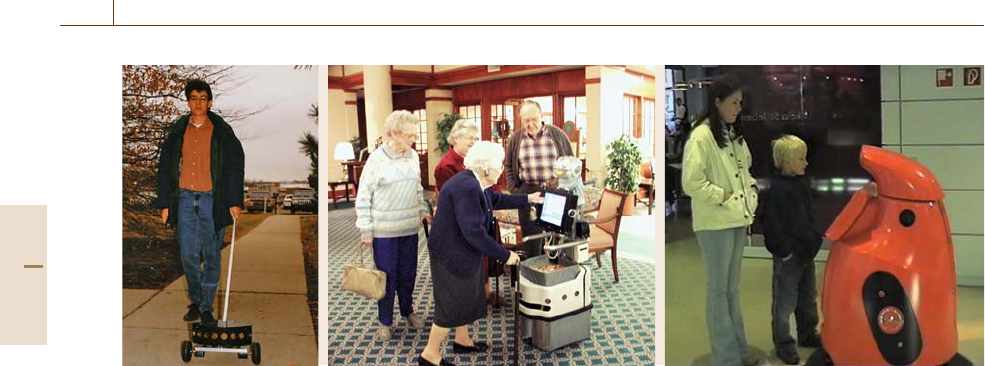
84.2.1 Mobility Aids
Robotic Walkers
Robotic walkers are enhanced off-the-shelf walkers
equipped with robot technology such as environment
sensors and drives. Using these technologies, they are
able to provide additional support to their user, ranging
from audio or visual information on the environment
to autonomous or semiautonomous navigation. For
existing robotic walkers, two basic types can be distin-
guished: passive and active robotic walkers.
Passive robotic walkers do not have any driven
wheels and move directly according to the applied
user forces (direct user control). Examples of passive
walkers are the COOL Aide [84.5](Fig.84.2a) and
PAMM-AID [84.6] systems, which usemotorized steer-
ing of the wheels to lead the user around obstacles. The
RT-Walker [84.7] uses special servo brakes to steer the
device in a collision-free direction. In case no obstacles
are detected the user has full control of the device and
can move it, similarly to a conventional walker. Most
passive systems are equipped with brakes to stop them
if they get too close to an obstacle or step. A guid-
ance system for Guido, the commercial successor of
PAMM-AID, has been presented [84.8](Fig.84.2b).
After a target has been set, the robot will plan and fol-
low a path to the target. During guidance the desired
direction indicated by the user input will be ignored.
The successor of the RT-Walker, ORTW-II [84.9], uses
a potential canal method which only allows deviations
up to a certain distance from the optimal path to the
target. The robotically augmented walker developed at
Carnegie Mellon University (CMU) [84.10](Fig.84.2c)
does not use its motors when traveling with a user but
tracks its position and displays the optimal direction
Part I 84.2
1488 Part I Home, Office, and Enterprise Automation
a) c)b)
Fig. 84.2a–c Examples of passive robotic walkers: (a) COOL Aide (courtesy of the University of Virginia, USA),
(b) Guido (courtesy of Haptica Ltd., Dublin, Ireland), and (c) CMU robotically augmented walker (courtesy of Carnegie
Mellon University, Pittsburgh, USA)
of travel on a screen to guide its user to the selected
target.
Active robotic walkers are equipped with motorized
wheels. Force or force-torque sensors of different kinds
are used to determine the forces applied to the system
by the user. These forces are used to calculate the de-
sired driving direction and speed of the walker (indirect
user control). Some systems (Silbo [84.11](Fig.84.3a),
Hitachi walker [84.12], RT-walker) are equipped with
angle sensors, enabling the required force input to be
adapted on slopes. All systems are able to detect ob-
stacles and stop in front of them; most of them adapt
the traveling direction to surround obstacles in advance.
The PAMM smart walker [84.13](Fig.84.3b) and the
CMU robotic walker [84.14](Fig.84.3c) are able to lo-
calize themselves in their environment and thus plan an
optimal path to a given target. The shared control sys-
tem of PAMM creates a virtual force, leading the robot
to the given target, which is combined with the real
forces applied to the device by the user. The gains of
a) b) c)
Fig. 84.3a–c Examples of active
robotic walkers:
(a) Silbo (courtesy
of Intelligent Healthcare Labora-
tory, Korea),
(b) Smart walker PAMM
(courtesy of Massachusetts Institute
of Technology, USA), and
(c) CMU
robotic walker (courtesy of Carnegie
Mellon University, Pittsburgh, USA)
each control input are set depending on the observed
user abilities. Whereas for PAMM an interface provid-
ing feedback to the user on the planned path has not
been presented, the CMU robotic walker displays the
desired direction of travel on a screen. The user is free
to move in any direction; however, if the deviation from
the planned path is too large, the velocity of the walker
will be reduced to force the user back to the path.
Other robotic walkers focus their works on addi-
tional support functions such as lifting assistance (Hi-
tachi walker, Monimad walker [84.15], MOBIL Walk-
ing & Lifting Aid [84.16], Walking helper II [84.17]),
person tracking (MOBIL Test Bed [84.18]) or moving
out of the way when not used (CMU robotically aug-
mented walker).
Robotic Wheelchairs
Similar to robotic walkers, robotic wheelchairs provide
enhanced safety and/or improved navigation capa-
bilities using mobile robotics technologies. Robotic
Part I 84.2
Service Robots and Automation for the Disabled/Limited 84.2 State of the Art 1489
wheelchairs are based on electric wheelchairs where
control over thedrives is at some point taken over bythe
integrated personal computer (PC). In order to perceive
the environment, robotic wheelchairs are equipped with
environment sensors such assonar sensorsor laserscan-
ners. Existing control systems for robotic wheelchairs
can be divided into two basic types [84.19]: model-
based approaches and behavior-based approaches.
Model-based shared control systems analyze the in-
put of the user and the measured environment data in
order to identify the intended travel direction of the user
and thus adapt the motion of the wheelchair. To iden-
tify the intention of the user, the current sensor input
of the user, e.g., the position of the joystick, is com-
pared with a previously recorded motion model and an
appropriate action is selected. The robotic wheelchairs
NavChair [84.20] or VAHM [84.21] use a method that
generates a histogram of the environment identifying
the optimal direction of travel (minimum vector field
histogram, MVFH). The user is responsible for high-
level control of the system, such as route-planning and
some navigation actions, while the machine overrides
unsafe maneuvers through autonomous obstacle avoid-
ance. It can provide addition assistance, e.g., for safely
passing narrow passages such as doors. The MVFH al-
gorithm ensures that the input of the user is considered
at all times and thus the user always feels in control
of the wheelchair. SmartChair [84.22] is another rep-
resentative of model-based shard control systems. This
robotic wheelchair is not only able to adjust the input
of the user for collision-free motion; it further provides
localization and path-planning capabilities to guide the
user to a previously specified target. SmartChair uses
a potential field method to calculate a suitable mo-
tion direction to the given target. MAid [84.23]isan
autonomous wheelchair able to safely pass crowded en-
vironments, however, at the cost of not considering the
input of the user during motion.
Behavior-based shared control systems assume that
the driving behavior of the robotic wheelchair can be
classified into a few basic tasks such as high-speed
driving, close-quarter manoeuvring, and docking ma-
noeuvres. From the input of the user and the measured
environment data, a suitable motion behavior is se-
lected. The crucial factor in behavior-based shared
control systems is to find out which behavior is cur-
rently most appropriate. Wheelsley [84.24] is a robotic
wheelchair based on the well-known behavior-based
subsumption architecture [84.25]. In free space, the
robot moves along with maximum velocity in the di-
rection indicated by the user. If an obstacle in the
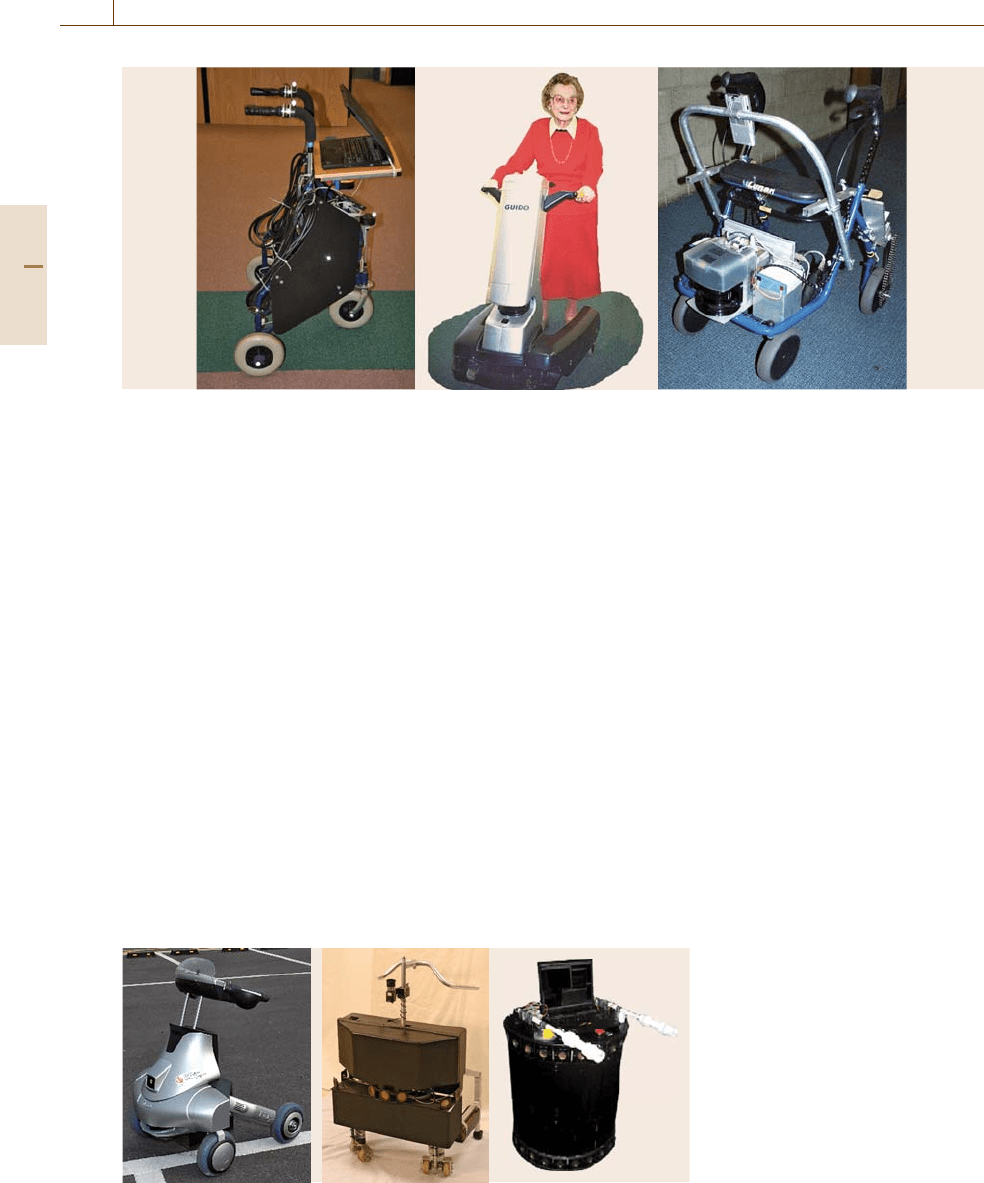
a) b)
Fig. 84.4a,b Examples of advanced robotic wheelchairs: (a) Rol-
land III (courtesy of the DFKI-Labor, Bremen, Germany) and
(b) OMNI (courtesy of Forschungsinstitut Technologie und Behin-
derung der Evangelischen Stiftung Volmarstein, Germany)
desired motion direction is detected, obstacle avoidance
behavior is activated to pass by the obstacle. Similar ap-
proaches are applied in the Rolland [84.26](Fig.84.4a),
RobChair [84.27], and Sharioto [84.28] projects. Some
motion behaviors conflict with each other, such as
passing a narrow passage and obstacle avoidance. An-
other conflict occurs if the user wants to dock to an
object while at the same time collision avoidance is re-
quired. For docking to an obstacle, in [84.28] the user’s
confidence when guiding the wheelchair in a specific
direction is evaluated. Only if the user moves straight
and without fluctuations towards an obstacle will the
direction be maintained.
Other robotic wheelchairs such as the office
wheelchair with high manoeuvrability and naviga-
tional intelligence for people with severe handicap
(OMNI) [84.29](Fig.84.4b) provide advanced assis-
tance through omnidirectional navigation capabilities
and height adjustment. The special mechanics of the
iBOT (http://www.ibotnow.com/) enable stair-climbing.
Even legged chairs such as i-foot, one of the part-
ner robots by Toyota designed to assist people [84.30],
which is able to move along in uneven terrain, have
recently been introduced.
84.2.2 Guidance Robots
Guidance robots are used to assist people with men-
tal weaknesses and diseases or blind people. Guidance
robots for the blind require direct physical contact to
the user. One of the first robotic guidance systems
Part I 84.2
1490 Part I Home, Office, and Enterprise Automation
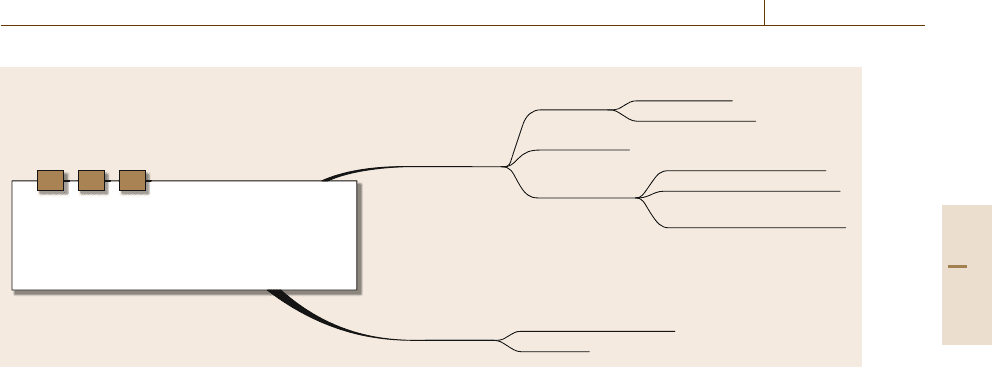
a) b) c)
Fig. 84.5a–c Examples of guidance robots: (a) GuideCane (courtesy of University of Michigan, USA), (b) Nursebot
(courtesy of CarnegieMellon University, Pittsburgh, USA), and
(c) exhibition guide MONAby Fraunhofer IPA, Germany
is the NavBelt [84.31], a device worn by the user.
Equipped with sonar sensors, NavBeld is able to de-
tect obstacles in front of the user and issue a warning.
GuideCane is the cane-based continuation of this re-
search (Fig. 84.5a). In contains a small mobile robot as
a base that carries the environment sensors and a cane
that the user can hold onto. Using a small joystick, the
user indicates the desired travel direction and is led
along by the robotic base. If an obstacle is detected by
the sensors, the path will be modified to lead the user
around the obstacle safely.
Other guidance robots are designed to assist the el-
derly, for example, to guide them to specific locations
in elderly care facilities. In this case, no direct contact
with the user is required. Nursebot [84.32](Fig.84.5b)
is a development that targets this application. Guidance
robots with similar capabilities are also applied in mu-
seums or exhibitions [84.33](Fig.84.5c).
84.2.3 Manipulation Aids
Manipulation aids are applied to assist disabled users
in eating, drinking or object replacement. This Section
describes existing fixed- or portable-platform manipula-
tors as well as existing autonomous mobile robots with
manipulation skills.
Fixed-Platform Manipulators
The professional vocational assistive robot (ProVAR)
[84.34] is a research prototype designed to assist in-
dividuals with a severe physical disability. The system
consists of an industrial manipulator attached to an
overhead track suspended above a worktable and is
able to handle objects for a user who has difficul-
ties in handling these objects himself. The manipulator
is controlled by voice commands or head motion in-
puts. The robot to assist the integration of the disabled
(RAID) [84.35] is a robotic workstation for use by in-
dividuals with little or no upper-limb function in office
environments. It is basedaround a custom-designed me-
chanical structureproviding storagefor books, manuals,
paper documents,and otherreference materials.A robot
arm is mounted on a linear track in front of the stor-
age zones. It is able to assist the user, e.g., to transport
books or diskettesor to hold abook and turnpages when
reading it. The arm’s working envelope includes a large
proportion of the desk area but does not reach to theuser
for reasons of safety.
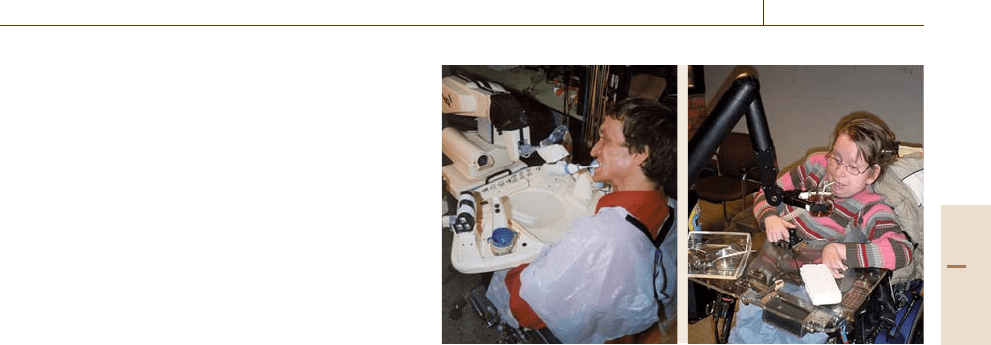
Portable-Platform Manipulators
Portable platform manipulators include manipulators
attached to a mobile base with castor wheels that can
be rolledaround andwheelchair-mountedmanipulators.
Handy1 [84.36](Fig.84.6a) is an example of the first
group of assistive manipulators. It consists of a robot
arm and a tray that can be selected for several appli-
cations such as feeding, cleansing, and make-up. The
robot is controlled by a switch input used in conjunction
with a linear scanning control system which is suit-
able for different disability groups. The assistive robot
service manipulator (ARM), which is also known as
Manus [84.37](Fig.84.6b), is a 6+2 degree of freedom
(DOF) robot that assists disabled people with a severe
handicap of their upper limbs. It compensates their lost
arm and hand function. It can be mounted on an electric
wheelchair (or mobile base) and allows numerous daily
Part I 84.2
Service Robots and Automation for the Disabled/Limited 84.2 State of the Art 1491
living tasks to be carried out in the home, at work, and
outdoors. By means of an input device such as a key-
pad (4×4 buttons), a joystick (e.g., of the wheelchair)
or another device attached to a nondisabled body part,
the manipulator can be operated to grasp objects with
its gripper.
Mobile Autonomous Robots
with Manipulation Skills
Mobile autonomous robots with manipulation skills are
a popular topic of current research. Even though re-
search in this field has grown significantly over recent
years, no commercial products have been placed on the
market so far. Among existing prototypes, two basic ap-
proached can be observed: human-like robots equipped
with legs and arms and wheel-based robots.
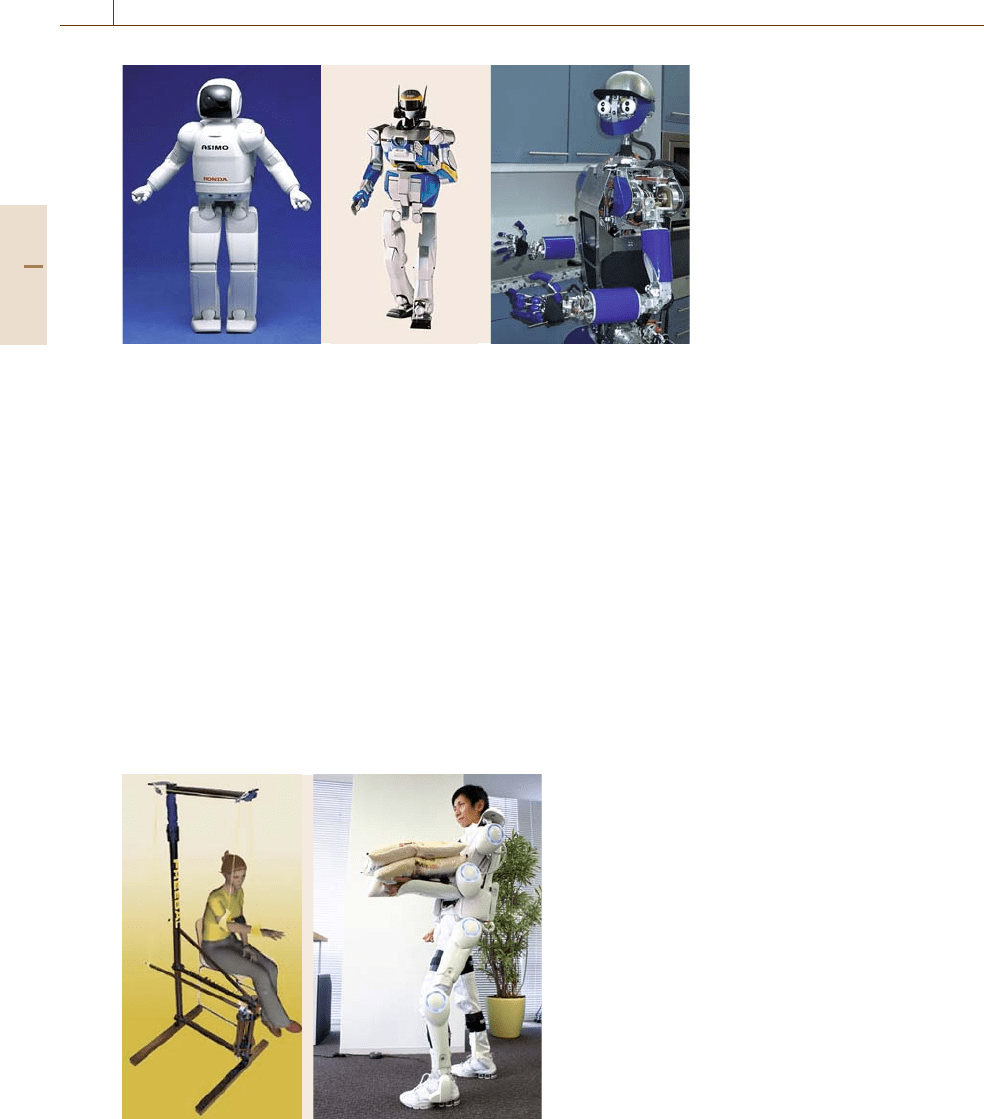
Humanoid robots with legs are most popular in
Japan. Most of the currently existing prototypes are not
specifically designed to assist disabled people. How-
ever, for many robot developers, this application is seen
as one of the most important for future products. The
partner robots developed by Toyota [84.30], for ex-
ample, were first demonstrated at EXPO 2005 AICHI,
Japan. During the EXPO they were applied to entertain
the visitors of Toyota’s pavilion by playing different in-
struments. However, this was only the first step towards
the creation of robots that can use tools, assist people,
and live in harmony with us. According to the part-
ner robot developers, currently, new robots are being
developed that can provide elderly care to help Japan
cope with its rapidly aging population. The goal of
the ASIMO [84.38](Fig.84.7a) development of Honda
is quite similar: to develop a robot that can duplicate
the complexities of human motion and genuinely help
people. Even though ASIMO is mainly used as a re-
search platform at the moment, someday ASIMO might
help with important tasks such as assisting the elderly
or a person confined to a bed or a wheelchair. HRP-
2 [84.39](Fig.84.7b) by Kawada and the US-American
SARCOS [84.40] humanoid robot are similar platforms
that can be used for experiments to further develop
robotic technologies developments.
One of the first wheel-based robots able to assist dis-
abled people with daily tasks is MOVAID by the Scuola
Superiore Sant’Anna in Italy [84.41]. The robot is able
to navigate in homelike environments and to perform
simple manipulation tasks. Another early development
is Hermes [84.42], developed at the Bundeswehr Uni-
versity Munich. Hermes is able to explore unknown
environments, to fulfil transportation and manipulation
tasks inspacious human-populatedareas, and to interact
a) b)
Fig. 84.6 (a) Portable-platform manipulators Handy1 (courtesy of
Forschungsinstitut Technologie und Behinderung der Evangelis-
chen Stiftung Volmarstein, Germany) and
(b) ARM (courtesy of
Exact Dynamics BV, Netherlands)
and communicate even with novice users in a natu-
ral and intuitive way. Research on assistive robots is
currently being performed in several projects in Ger-
many such as the Collaborative Research Center on
Humanoid Robots in Karlsruhe [84.43], where several
generations of the ARMAR platform (Fig.84.7c) have
been set up in the last years. One of the most advanced
developments in wheel-based robotic home assistants
is the German Care-O-bot [84.44] which will be de-
scribed in detail in Sect.84.3.
Recent developments of wheeled robots in Japan in-
clude the excellent mobility and interactive existence
as workmate (EMIEW) by Hitachi [84.45] and Smart-
Pal by Yaskawa [84.46]. At the EXPO 2005 AICHI,
Japan, they were introduced in a bar scenario, where
they demonstrated their abilities to serve drinks to visi-
tors. By now, for each robot, the second generation has
recently been introduced. Another interesting Japanese
development is enon (exciting nova on network)by
Fujitsu [84.47], designed for duties such as providing
guidance, transporting objects, and security patrolling.
In Japan, limited sales of enon have already been an-
nounced.
84.2.4 Orthoses and Exoskeletons
Orthoses are understood as orthopaedic devices to sup-
port parts of the body with reduced mobility. There are
those for fixation at reversible or nonreversible defor-
mations and bad postures as well as for recovery (e.g.,
ruff). Others are used to support, e.g., arch supports and
orthopaedic corsets. The latter are said to be passive
if they support only, and active if they force the body
Part I 84.2
1492 Part I Home, Office, and Enterprise Automation
a) b) c)
Fig. 84.7a–c Popular humanoid and
wheel-based robots with manipula-
tion skills:
(a) ASIMO (courtesy
of Honda Motor Co., Ltd., Japan),
(b) HRP-2 (courtesy of National In-
stitute of Advanced Industrial Science
and Technology, Japan),
(c) Armar 3
(courtesy of the Collaborative Re-
search Center 588 Humanoid Robots
– Learning and Cooperating Multi-
modal Robots, Karlsruhe, Germany)
to actively correct, e.g., mis-statics of the spine. Any
orthoses usually requires significant fine-tuning in or-
der to meet the body conditions as well as the medical
demands of an individual.
Utilizing robotics for orthoses is limited to a few
application examples and there is a fuzzy border to-
wards the prostheses domain, however there is some
research and development (R&D) purely for orthoses.
Most researchers focus on rehabilitation, e.g., of stroke
patients. Sometimes an orthosis may look quite simple
at first sight, but there may be a lot of complexity and
careful thoughts behind any combination of materials,
part design, and choice of mechanisms. An earlier ex-
ample is the Wilmer elbow orthosis [84.48], a passive
foot-drop orthosis from the University of Hawaii-
Manoa, USA [84.49], and numerous stationary passive
or motor-powered gravity-compensation rehabilitation
a) b)
Fig. 84.8 (a) Freebal (courtesy of Baat Medical, Hengelo,
Netherlands) and
(b) Hybrid Assistive Leg (HAL, courtesy
of Tsukuba University/Cyberdyne Inc., Japan)
devices for the upper extremities such a dynamic
arm support [84.50], Freebal [84.51](Fig.84.8a), and
iPAM [84.52]. Some orthoses are equipped with elab-
orated spring and lever mechanisms, brakes, and may
also be motor-powered with advanced control algo-
rithms such as a foot orthosis from the University of
Osaka, Japan [84.53], and a knee orthoses from the
Vrije Universiteit Brussels, Belgium, powered by pneu-
matic artificial muscles [84.54].
There are also quite complex, full-body gait rehabil-
itation systems suchas HapticWalker [84.55], STRING-
MAN [84.56], and LOKOMAT [84.57], which are
composed of a stationary frame, a hanging harness for
the patient to put on, and possibly a treadmill. Current
R&D covers mechanical design as well as extending
the functionalities of existing systems regarding sens-
ing, control, haptic feedback, artificial intelligence, and
virtual reality.
The term exoskeleton is also often used for powered
orthoses, but it is not only limited to medical appli-
cations. There are those for a single extremity (upper
or lower), or covering one or few joints, e.g., knee
and ankle. And there are those for full-body motion
support, either stationary or mobile. Some examples
are ALEX (stationary, for gait rehabilitation) [84.58],
BLEEX (mobile, for military use to increase pay-
load of a soldier carrying equipment) [84.59], and
the Hybrid Assistive Leg (HAL, mobile, full-body ex-
oskeleton, Fig.84.8b) [84.60].
84.2.5 Prostheses
While orthoses and exoskeletons are attached to ex-
isting parts of the body, prostheses are replacements
of lost extremities. Most sold prostheses of arms and
hands are purely cosmetic, whereas most prostheses
of legs and feet are passive but functional, i.e., they
Part I 84.2
Service Robots and Automation for the Disabled/Limited 84.3 Application Example: the Robotic Home Assistant Care-O-bot 1493
enable patients to walk. However, scientific R&D as
well as commercial high-end products clearly aim at
coming close to the functionality of the replaced body
part. This means motorization, haptic perception, and
reliable and comfortable control by the patient. Some
advanced commercial prostheses of fingers or the entire
hand are the i-LIMB [84.61] and the Fluidhand [84.62],
and of the leg are the c-leg [84.63]andthePow-
erknee [84.64].
Beside commercial developments there are a num-
ber of prostheses in research. Focus is placed on
powered prostheses and their mechanical and mecha-
tronic design, signal interfaces to the human body for
control and feedback, and advanced motion control.
There are developments for upper [84.65](Fig.84.9)
and lower limbs; some examples of recent lower-limb
developments are powered ankle–foot and knee pros-
thesis as described in [84.66] and [84.67].
Forearm
catalyst
pack
Elbow
catalyst
pack
Elbow
valve
Propellant
cartridge
Elbow
cylinder
Forearm
cylinders
Forearm
valve
bank
Gas
distribution
lines
Fig. 84.9 Steampunk artificial arm (courtesy of Vanderbilt Univer-
sity, Nashville, USA)
84.3 Application Example: the Robotic Home Assistant Care-O-bot
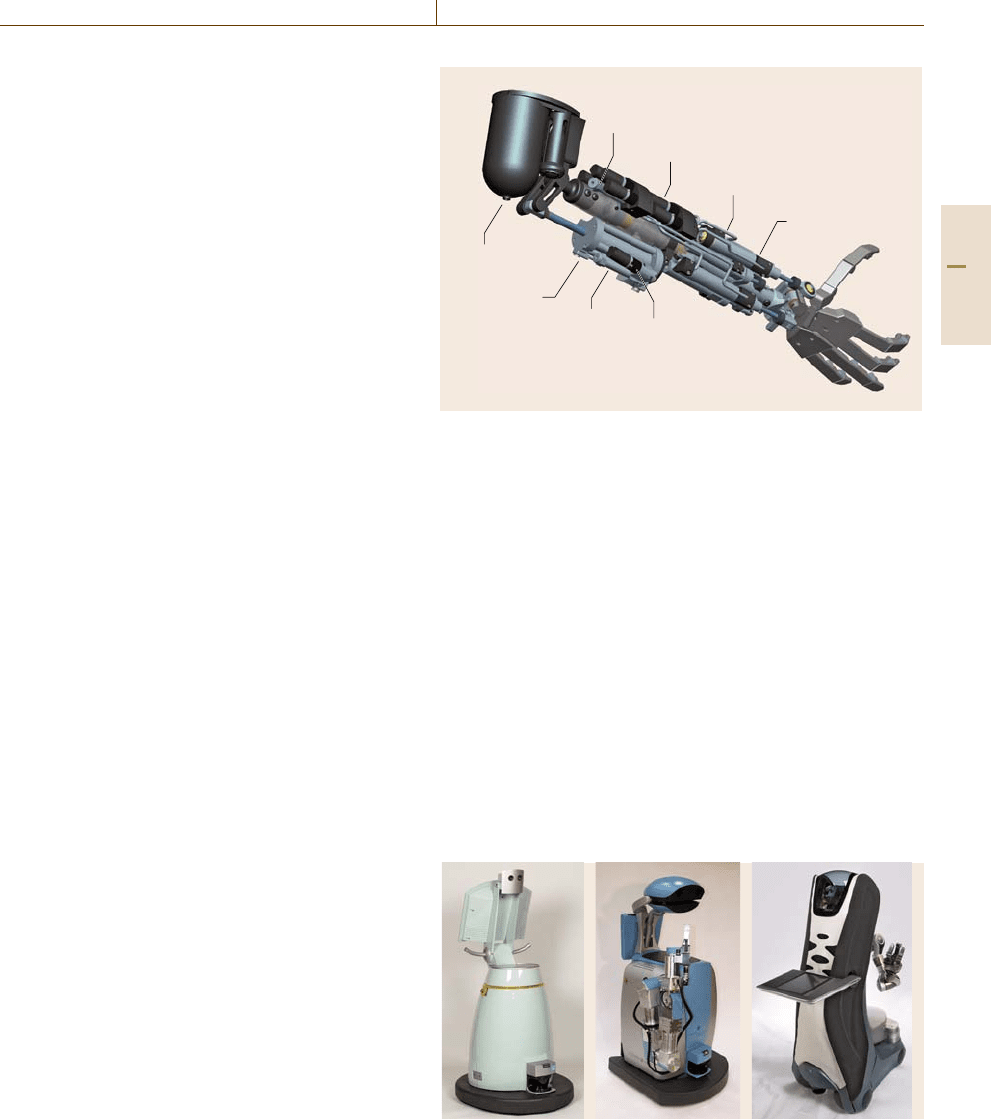
84.3.1 History
of Care-O-bot Development
Care-O-bot is a mobile robot assistant designed of
Fraunhofer IPA, Germany to assist people in daily
life activities. Three Care-O-bot robots have been
developed so far: The first Care-O-bot prototype
(Fig.84.10a) [84.68]was built in 1998, when the idea of
building rehabilitation robots was still new. Care-O-bot
I is a mobile platform with a touchscreen, able to navi-
gate autonomously and safely in indoor environments,
and communicate with or guide people. As a mobile
platform alone, it can be used for transportation and
safeguarding tasks; however, it is unable to execute
complex manipulation tasks as required from a home
assistant. Care-O-bot II (Fig.84.10b) [84.69], built in
2002, is additionally equipped with a manipulator arm,
adjustable walking supporters,a tilting sensor head con-
taining two cameras and a laser scanner, and a handheld
control panel [84.70]. The manipulator arm, devel-
oped specifically for mobile service robots, provides the
possibility of handling typical objects in a home envi-
ronment. A flexible gripper attached to the manipulator
is suitable for grasping various objects such as mugs,
plates, and bottles. A handheld control panel is used for
instructing and supervising the robot. In addition to all
mobility functions already solved in Care-O-bot I, the
second prototype is able to execute manipulation tasks
autonomously and can be used as an intelligent walking
support. Care-O-bot 3 (Fig.84.10c), built in 2008, is the
latest generation of this successful development series.
It is equippedwith the lateststate-of-the-art components
including omnidirectional drives, a seven-DOF redun-
dant manipulator, a three-finger gripper, and a flexible
interaction tray that can be used to safely pass objects
between the human and the robot. Its moveable sen-
sor head contains range and image sensors enabling
autonomous object learning and detection and three-
dimensional (3-D) supervision of the environment in
real time.
a) b) c)
Fig. 84.10a–c Care-O-bot prototypes by Fraunhofer IPA,Ger-
many. Care-O-bot I
(a), Care-O-bot II (b) and Care-O-
bot 3
(c)
Part I 84.3
1494 Part I Home, Office, and Enterprise Automation
a) b) c) d)
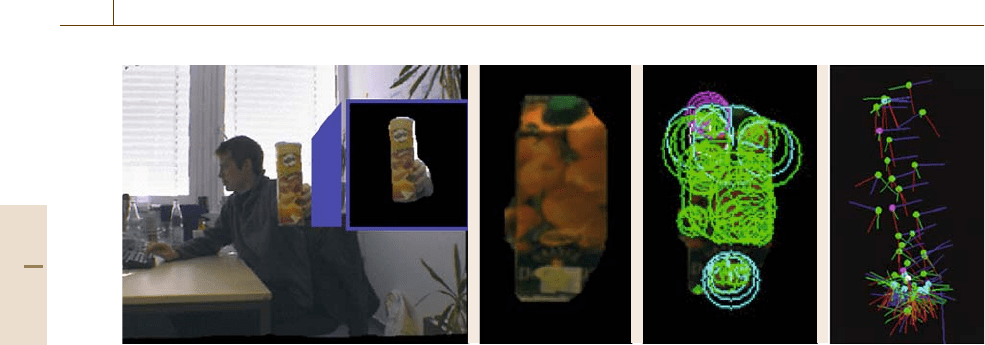
Fig. 84.11a–d Range segmentation for an object (a), object representation: side view of a Tetra Pak (b), detected feature
points
(c), and corresponding feature point cloud (d)
84.3.2 Key Technologies
Autonomous or Semiautonomous Navigation
All Care-O-bot prototypes are able to navigate au-
tonomously to a given target [84.71]. Autonomous
navigation is a key issue in order to execute a fetch and
carry task or to guide the user to a specific location.
Chapter 16 has additional insights in automation mo-
bility and navigation. A static environment map is used
to plan an optimal path to the given target. Different
approaches for global planning have been implemented
and can be selected according to the geometry, kinemat-
ics, and current operation mode of the robot [84.72].
The generated path is smoothed and eventually modi-
fied in reaction to dynamic obstacles or other external
forces. A laser scanner attached to the robot is used for
continuous and dependable obstacle detection.
Automatic Object Detection
In order to grasp an object, the robot must be able to
detect relevant objects in the environment. This task is
solved by combining a range imaging sensor [84.73]
with a color camera. The recognition algorithm is based
on scale-invariant feature transform (SIFT) descriptors
that are recorded for each object and fed into a learn-
ing algorithm (a one-class support vector machine,
SVM) [84.74]. Using the data of the range imaging
sensor, feature keypoints can be segmented from the
background. A region in space is effectively masked out
in the color image of the scene using the range mea-
sures for the corresponding pixels in the range image.
New objects are taught to the robot by placing them in
front of the sensors and by recording the relevant SIFT
keypoints for the object [84.75]. Figure 84.11a displays
the teaching of new objects using the proposed range
segmentation. Figure 84.11b–d illustrates the learning
process and resulting representation of an object: sev-
eral images of the object are recorded and for each the
feature points are detected. In a second step the feature
points of all images are fused into a 3-D feature point
cloud which again can be used to detect and compute
the position of the object in a given scene.
Object Manipulation
Based on the data from the range imaging sensor and
the identified location of the object to be grasped,
a collision-free trajectory for moving the manipulator
to the detected object can be computed. To solve this,
the robot and scene are modeled using oriented bound-
ing boxes (OBBs). For the robot a distinction is made
between static components (e.g., the robot’s torso) and
dynamic components (e.g., its manipulators). The dy-
namic components are mapped by articulated models
which are updated with each robot movement. The
model of the scene is obtained by generating corre-
sponding OBB models fromthe point cloudobtained by
the range sensor. The obstacle model is used as the basis
for online collision monitoring. The algorithm consists
of two main phases: determination of potentially col-
liding objects by a rough distance check based on the
velocity vectors of all moving parts, and subsequent
elaborate collision tests for all objects in the determined
potential colliding sets. Figure 84.12ashowstheveloc-
ity vectors of a moving arm. Figure 84.12bshowsthe
manipulator about to collide with the robot torso; the
respective joints are marked in red color. Figure 84.12c
shows successful collision detection for simultaneous
movement of two manipulators.
In addition to the online collision monitoring,
the obstacle model provides the basis to compute
Part I 84.3