Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.


Computer and Robot-Assisted Medical Intervention References 1465
stereotactic neurosurgery, Surg. Neurol. 27,543–
547 (1987)
82.5 H.F. Reinhardt: Neuronavigation: a ten year re-
view. In: Computer-Integrated Surgery,ed.by
R.H. Taylor, R. Mosges, S. Lavallée (MIT Press, Cam-
bridge 1996) pp. 329–341
82.6 P.J. Kelly, B.A. Kall, S.S. Goerss, F. Earnest:
Computer-assisted stereotaxic laser resection of
intra-axial brain neoplasms, J. Neurosurg. 64(3),
427–439 (1986)
82.7 Y.S. Kwoh, J. Hou, E.A. Jonckheere, S. Hayati: A ro-
bot with improved absolute positioning accuracy
for CT guidedstereotactic brain surgery, IEEE Trans.
Biomed. Eng. 35(2), 153–160 (1988)
82.8 S. Lavallée, J. Troccaz, L. Gaborit, P. Cinquin,
A.L. Benabid, D. Hoffmann: Image guided oper-
ating robot: a clinical application in stereotactic
neurosurgery, Proc. IEEE Conf. Robot. Autom. (Nice
1992) pp. 618–624
82.9 D. Glauser, H. Fankhauser, M. Epitaux, J.L. Helfti,
A. Jaccottet: Neurosurgical robot Minerva: first re-
sults and current developments, J. Image-Guid.
Surg. 1(5), 266–272 (1995)
82.10 H.A. Paul, W.L. Bargar, B. Mittlestadt, B. Musits,
R.H. Taylor, P. Kazanzides, J. Zuhars, B. Williamson,
W. Hanson: Development of a surgical robot for
cementless total hip arthroplasty, Clin. Orthopaed.
Relat. Res. 285, 57–66 (1992)
82.11 W.L. Bargar, A. Bauer, M. Borner: Primary and re-
vision total hip replacement using the Robodoc(R)
system, Clin. Orthopaed. Relat. Res. 354,82–91
(1998)
82.12 J. Sackier, Y. Wang: Robotically assisted laparo-
scopic surgery: from concept to development, Surg.
Endosc. 8, 63–66 (1994)
82.13 S. Aiono, J.M. Gilbert, B. Soin, P.A. Finlay, A. Gor-
dan: Controlled trial of the introduction of a robotic
camera assistant (EndoAssist) for laparoscopic
cholecystectomy, Surg. Endosc. 16(9), 1267–1270
(2002)
82.14 G.S. Guthart, J.K. Salisbury: The Intuitive telesur-
gery system: overview and application, Proc. IEEE
Robot. Autom. Conf. (San Francisco 2000)
82.15 J. Troccaz, M. Peshkin, B.L. Davies: Guiding
systems: introducing synergistic devices and dis-
cussing the different approaches, Med. Image Anal.
2(2), 101–119 (1998)
82.16 M. Jakopec, F. Rodriguez y Baena, S.J. Harris,
J. Cobb, B.L. Davies: The hands-on orthopaedic
robot Acrobot: early clinical trials of total knee re-
placement surgery, IEEE Trans. Robot. Autom. 19(5),
902–911 (2003)
82.17 J. Troccaz, Y. Delnondedieu: Semi-active guid-
ing systems in surgery. A two-DOF prototype of
the passive arm with dynamic constraints (PADyC),
Mechatronics 6(4), 399–421 (1996)
82.18 O. Schneider, J. Troccaz: A six degree of freedom
passive arm with dynamic constraints (PADyC) for
cardiac surgery application: preliminary experi-
ments, Comput. Aided Surg., special issue Med.
Robot. 6(6), 340–351 (2001)
82.19 S.C. Ho, R.D. Hibberd, B.L. Davies: Robot assisted
knee surgery, IEEE Eng. Med. Biol. Mag. 14(2), 292–
300 (1995)
82.20 Mako, www.makosurgical.com
82.21 A. Vilchis, J. Troccaz, P. Cinquin, K. Masuda,
F. Pellissier: A new robot architecture for tele-
echography, IEEE Trans. Robot. Autom., special
issue Med. Robot. 19(5), 922–926 (2003)
82.22 P. Berkelman, P. Cinquin, E. Boidard, J. Troccaz,
C. Letoublon, J.-M. Ayoubi: Design, control, and
testing of a novel compact laparascopic endoscope
manipulator, J. Syst. Control Eng. 217(14), 329–341
(2003)
82.23 E. Taillant, J. Avila-Vilchis, C. Allegrini, I. Bricault,
P. Cinquin: CT and MR compatible light puncture
robot: architectural design and first experiments.
In: Medical Image Computing and Computer As-
sisted Interventions,LNCS,Vol.2,ed.byG.Goos,
J. Hartmanis, J. van Leeuwen (Springer, Berlin Hei-
delberg 2004) pp. 145–152
82.24 C. Plaskos, P. Cinquin, S. Lavallée, A. Hodgson:
Praxiteles: a miniature bone-mounted robot for
minimal access total knee arthroplasty, Int. J. Med.
Robot. Comput. Aided Surg. 1(4), 67–79 (2006)
82.25 M. Shoham, M. Burman, E. Zehavi, L. Joskowicz,
E. Batkilin, Y. Kunicher: Bone-mounted miniature
robot for surgical procedures: concept and clini-
cal applications, IEEE Trans. Robot. Autom., special
issue Med. Robot. 19(5), 893–901 (2003)
82.26 B. Kim, Y. Jeong, H. Lim, J. Park, A. Menciassi,
P. Dario: Functional colonoscope robot system,
Proc. IEEE Int. Conf. Robot. Autom. (2003)
82.27 N.A. Patronik, C.N. Riviere, S. El Qarra, M.A.
Zenati: The HeartLander: A Novel Epicardial Crawl-
ing Robot for Myocardial Injections Int. Congr. Ser.
(CARS’2005), Vol. 1281 (Elsevier, Amsterdam 2005)
pp. 735–739
82.28 M.A. Rentschler, S.M. Farritor, K.D. Iagnemma:
Mechanical design of robotic in vivo wheeled mo-
bility, J. Mech. Des. 129, 1037–1045 (2007)
82.29 K.B. Yesin, K. Vollmers, B.J. Nelson: Modeling and
control of untethered biomicrorobots in a fluidic
environment using electromagnetic fields, Int. J.
Robot. Res. 21(5/6), 527–536 (2006)
82.30 K. Ikuta, M. Tsukamoto, S. Hirose: Shape memory
alloy servo actuator with electric resistance feed-
back and application to active endoscope, Proc.
IEEE Int. Conf. Robot. Autom. (Philadelphia 1988)
pp. 427–430
82.31 T.Fukuda,S.Guo,K.Kosuge,F.Arai,M.Negoro,
K. Nakabayashi: Micro active catheter system with
multi degrees of freedom, Proc. IEEE Int. Conf.
Robot. Autom. (San Diego 1994) pp. 2290–2295
82.32 www.givenimaging.com
82.33 www.rfnorika.com
Part H 82

1466 Part H Automation in Medical and Healthcare Systems
82.34 R. Kumar, P. Berkelman, P. Gupta, A. Barnes,
P.S. Jensen, L.L. Whitcomb, R.H. Taylor: Prelim-
inary experiments in cooperative human/robot
force control for robot assisted microsurgical ma-
nipulation, Proc. IEEE Int. Conf. Robot. Autom. (San
Francisco 2000) pp. 610–617
82.35 W.H. Zhu, S.E. Salcudean, S. Bachmann, P. Abol-
maesumi: Motion/force/image control of a diag-
nostic ultrasound robot, Proc. IEEE Int. Conf. Robot.
Autom. (San Francisco 2000) pp. 1580–1586
82.36 E. Dombre, X. Thérond, E. Dégoulange, F. Pierrot:
Robot-Assisted detection of atheromatous plaques
in arteries, Proc. IARP Workshop Med. Robot. (Vi-
enna 1996) pp. 133–140
82.37 E. Dombre, G. Duchemin, P. Poignet, F. Pierrot.
Dermarob: A safe robot for reconstructive surgery,
IEEE Trans. Robot. Autom., special issue Med.
Robot. 19(5), 876–884 (2003)
82.38 A. Schweikard, M. Bodduluri, J.M. Adler: Plan-
ning for camara-guided robotic radiosurgery, IEEE
Trans. Robot. Autom. 14(6), 951–962 (1998)
82.39 M. Bodduluri, J.M. McCarthy: X-ray guided robotic
radiosurgery for solid tumors, Proc. IEEE/ASME Int.
Conf. Adv. Intell. Mechatron. (Como 2001) pp. 1065–
1069
82.40 A. Schweikard, G. Glosser, M. Bodduluri, M.J. Mur-
phy, J.R. Adler: Robotic motion compensation for
respiratory movement during radiosurgery, Com-
put. Aided Surg., special issue Plan. Image Guid.
Radiat. Ther. 5(4), 263–277 (2000)
82.41 A. Schweikard, H. Shiomi, J. Adler: Respiration
tracking in radiosurgery without fiducials, Int. J.
Med. Robot. Comput. Assist. Surg. 1(2), 19–27 (2005)
82.42 Y. Nakamura, K. Kishi, H. Kawakami: Heart beat
synchronization for robotic cardiac surgery, Proc.
IEEE Int. Conf. Robot. Autom. (Seoul 2001) pp. 2014–
2019
82.43 A. Krupa, J. Gangloff, C. Doignon, M.F. de Mathelin,
G. Morel, J. Leroy, L. Soler, J. Marescaux: Au-
tonomous 3-D positioning of surgical instruments
in robotized laparoscopic surgery using visual ser-
voing, IEEE Trans. Robot. Autom., special issue
Med. Robot. 19(5), 842–853 (2003)
82.44 S. Voros, J.A. Long, P. Cinquin: Automatic detec-
tion of instruments in laparoscopic images: a first
step towards high-level command of robotic en-
doscopic holders, Int. J. Robot. Res. 26(11-12),
1173–1190 (2007)
82.45 M.A. Vitrani, G. Morel, T. Ortmaier: Automatic guid-
ance of a surgical instrument with ultrasound
based visual servoing, Proc. IEEE Int. Conf. Robot.
Autom. (Barcelona 2005) pp. 508–513
82.46 P. Abolmaesumi, S.E. Salcudean, W.H. Zhu,
M.R. Sirouspour, S.P. DiMaio: Image-guided con-
trol of a robot for medical ultrasound, IEEE Trans.
Robot. Autom. 18(1), 11–23 (2002)
82.47 S. Pinault, G. Morel, M. Auger, R. Ferrand, G. Mabit:
Using an external registration system for daily pa-
tient repositioning in protontherapy, Proc. IEEE/RSJ
Int. Conf. Intell. Robot. Syst. (IROS’07) (San Diego
2007) pp. 4289–4294
82.48 B.L. Davies: A discussion of safety issues for med-
ical robots. In: Computer-Integrated Surgery,ed.
by R.H. Taylor, R. Mosges, S. Lavallée (MIT Press,
Cambridge 1996) pp. 287–296
82.49 www.worldrobotics.org
Part H 82

1467
Home, Of
Part I
Part I Home, Office, and Enterprise Automation
83 Automation in Home Appliances
T. Joseph Lui, Benton Harbor, USA
84 Service Robots and Automation
for the Disabled/Limited
Birgit Graf, Stuttgart, Germany
Harald Staab, Ladenburg, Germany
85 Automation in Education/Learning Systems
Kazuyoshi Ishii, Hakusan City, Japan
Kinnya Tamaki, Tokyo, Japan
86 Enterprise Integration and Interoperability
François B. Vernadat, Metz, France
87 Decision Support Systems
Daniel J. Power, Cedar Falls, USA
Ramesh Sharda, Stillwater, USA
88 Collaborative e-Work, e-Business,
and e-Service
Juan D. Velásquez, West Lafayette, USA
Shimon Y. Nof, West Lafayette, USA
89 e-Commerce
Clyde W. Holsapple, Lexington, USA
Sharath Sasidharan, Huntington, USA
90 Business Process Automation
Edward F. Watson, Baton Rouge, USA
Karyn Holmes, Covington, USA
91 Automation in Financial Services
William Richmond, Cullowhee, USA
92 e-Government
Dieter Rombach, Kaiserslautern, Germany
Petra Steffens, Kaiserslautern, Germany
93 Collaborative Analytics
for Astrophysics Explorations
Cecilia R. Aragon, Berkeley, USA

1468
Home, Office, and Enterprise Automation. Part I This part is about functional automation areas at home, in
the office, and in general enterprises, including multi-enterprise networks. Common to these areas is the power
of automation appliances, such as home and office appliances, and of Internetworking, such as collaborative de-
cision support and scientific exploration, collaborative work, and e-Activities, from service to business, banking
to home-office, laboratories, schools, government and tele-work. Chapters also cover the automation theories,
techniques and practice, design, operation, challenges and emerging trends in education and learning, bank-
ing, commerce. General automation principles and functions include decision support, collaboration, integration,
planning, services forunique needs such as disabilities,and businessprocess automation.An important dimension
of the material compiled for this part is that it is useful for all other functional areas of automation, for in-
stance, office and school automation, interoperability, client relations management, enterprise resource planning,
and collaborative decision support (all subjects of this part) are directly applicable to industrial, infrastructure,
agriculture, medical, transportation, service, and other domains of automation.

1469
Automation i
83. Automation in Home Appliances
T. Joseph Lui
Home appliances, by their very nature, represent
realizations of the principles of automation. Home
appliances exist for the purpose of automating
otherwise manual processes in the home. The
operation of home appliances has been refined
over the years, though the machine function has
remained essentially the same. Advancements
in the areas of microprocessor-based controls,
sensors, displays, and interconnectivity, however,
are enabling a new generation of appliances
with advanced automation capabilities. Smart
refrigerators, smart cooking appliances, and smart
cleaning appliances are already appearing on the
market. Along with these appliances we observe
the viability of advanced applications in home
automation. Software-based controls, appliance
area networks (AANs), and display devices capable
of creating a rich user experience are enabling
advances in refrigeration automation, cooking
integration automation, automated home utility
management, automated fault and performance
83.1 Background and Theory ........................1469
83.1.1 History...................................... 1469
83.1.2 Enabling Technologies ................ 1470
83.2 Application Examples, Guidelines,
and Techniques....................................1472
83.2.1 Refrigeration ............................. 1472
83.2.2 Cooking .................................... 1474
83.2.3 Cleaning ................................... 1475
83.2.4 General Appliance Automation .... 1475
83.2.5 Household Energy Management... 1478
83.3 Emerging Trends and Open Challenges ...1481
83.3.1 Trends ...................................... 1481
83.3.2 Challenges ................................ 1482
83.4 Further Reading ...................................1483
References ..................................................1483
monitoring, and more. In this chapter we explore
the enabling technologies and applications of
advanced home appliance automation.
Convenience – in the form of home chore automa-
tion – has always been the primary justification for
a consumer to purchase a home appliance. Major home
activities including refrigeration, cooking, and cleaning
have enjoyed substantial levels of automation for many
years. In this chapter, we explore the history of home
chore automation, enabling technologies for advanced
automation, and several applications thereof. We will
not address heating, ventilation and air-conditionning
(HVAC), lighting, entertainment, or security systems.
Interested readers can refer to Chaps. 62 and 71 for
treatment of these topics. Here, we focus specifically on
major appliances, namely, refrigerators, dish washers,
cook tops and ovens, clothes washers and dryers, and
microwave ovens. We do not address smaller appliances
such as food processors.
83.1 Background and Theory
83.1.1 History
Home appliances, by their very nature, automate an oth-
erwise manual process. The clothes washer automates
the manual process of fabric care. The food proces-
sor automates portions of the manual processes of food
preparation. The list goes on. So, in a sense, the home
was the first place in which automation received mass-
Part I 83
1470 Part I Home, Office, and Enterprise Automation
market appeal. The automatic clothes washing machine
was introduced in the USA commercially in 1911 and
was a common feature of US homes by the close of
the 1920s. Today, 80% of US homes have a clothes
washer [83.1]. Moreover, though the microwave oven
was only introduced in 1967, the convenience provided
has resulted in around 85% of households having the
appliance today. 1967 is the year of introduction of the
first commercially viable countertop microwave oven:
the Radarange from Raytheon/Amana. The first mi-
crowave oven of any kind was introduced in 1947, also
by Raytheon [83.2].
Home appliances are on a long evolution path in
which they have been improved aesthetically, refined
operationally, and cost-reduced. However, the degree
of automation of the fundamental processes has not
changed substantially: a refrigerator still essentially
keeps food cold; a water heater still basically keeps
water hot. Typically, the quantum leaps in home ap-
pliance automation have not occurred within existing
appliances, but with the introduction of new appliances.
Examples include the microwave oven in 1967 and the
trash compactor in 1969. However, opportunities for
increased automation of the processes performed by ex-
isting appliances do exist and are under development.
Advanced automation opportunities for home appli-
ances appear on two fronts: convenience and precision.
Existing processes can be made more convenient for the
user, for example, by reducing the amount of user input
and intervention required by the process. Processes can
be made more precise and, in particular, more efficient
by transferring some decision-making responsibilities
from the user to the appliance itself.
Start
End
Fill
30s
Agitate
5min
Drain
1min
Spin
2min
Fill
30s
Agitate
5min
Drain
1min
Spin
2min
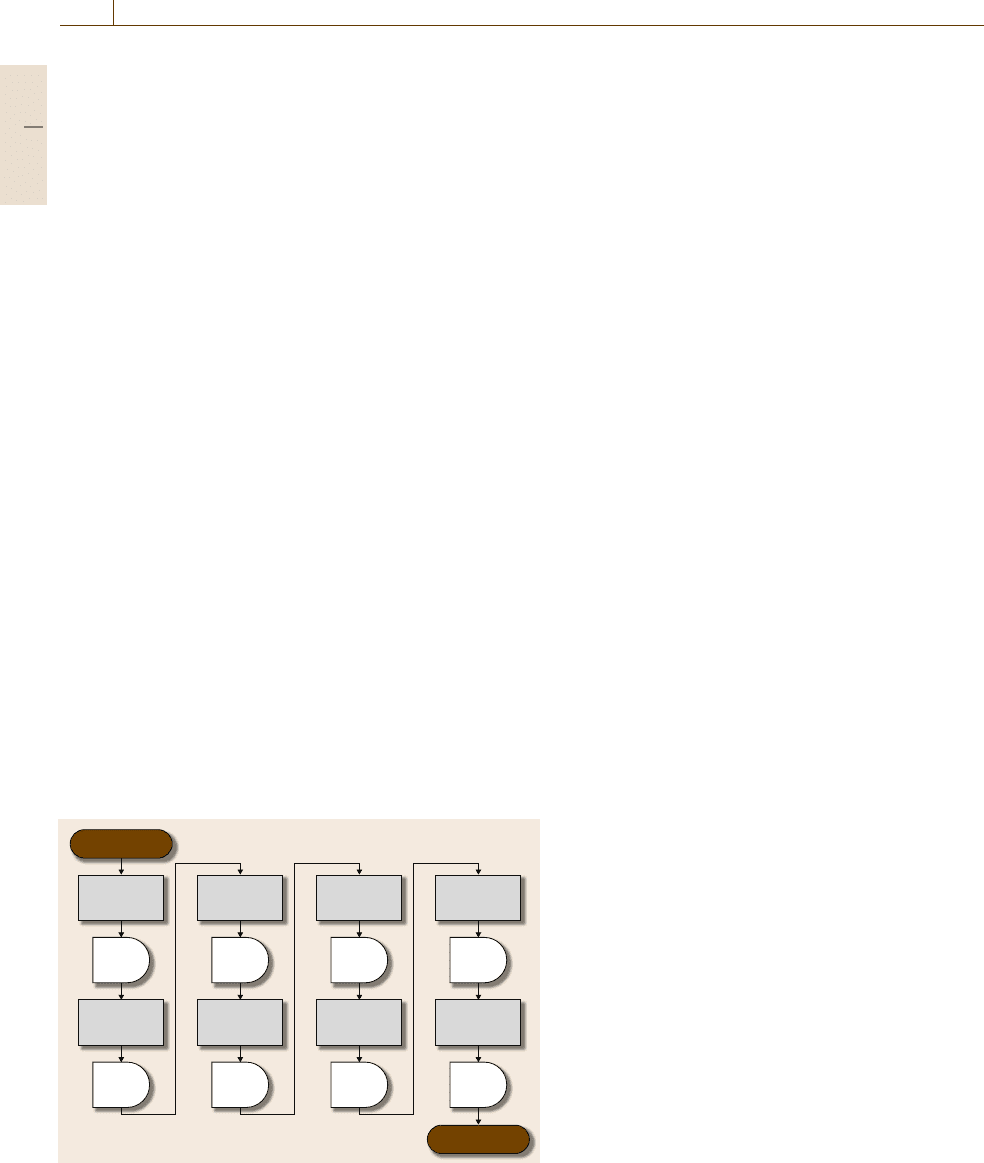
Fig. 83.1 Simple clothes washer algorithm
83.1.2 Enabling Technologies
Microprocessor Controls
The fundamental enabler for advanced home ap-
pliance automation has been the introduction of
microprocessor-based control systems and associated
software. In the past, electromechanical control systems
have made dramatically increased automation either in-
feasible or impractical. However, virtually all modern
major appliances – spanning refrigeration, fabric care,
and cooking – are now equipped with a programmable
microprocessor, thus setting the stage for quantum leaps
in automation.
Sensors
Microprocessors ostensibly can implement their pro-
cesses without environmental inputs; for example,
a clothes washer could operate based on the simple
algorithm presented in Fig.83.1.
However, advanced automation and, in particular,
increased efficiency are dependent on retrieval of in-
formation from the process environment. Thus, another
key technological enabler is environmental sensors. Ex-
amples of important sensors include:
•
Temperature sensors
•
Flow meters
•
Optical cameras
•
Infrared sensors
•
Chemical sensors
•
Radiofrequency identification (RFID) receivers.
Temperature sensors give the microprocessor access
to, for example, the temperature of inflowing water,
ambient or internal air, and food in the case of refrigera-
tion and cooking appliances. Flow meters are employed
primarily to provide data on water volumes, which
can be crucial to achieving a desired water tempera-
ture. Optical cameras provide inputs to, for example,
food doneness determination algorithms. Infrared sen-
sors provide noninvasivemeans toevaluate temperature,
while chemical sensors provide key data for evaluating
things such as detergent concentrations.
The sensors introduced above generally serve to
evaluate the physical characteristics of some element of
the process being executed, or the thing on which the
process is operating (food, clothing, etc.). However, an
RFID receiver provides access to stored data about the
item being processed which is not otherwise accessible
– at least not cheaply and conveniently. For example,
RFID tags embedded inclothing could contain informa-
Part I 83.1
Automation in Home Appliances 83.1 Background and Theory 1471
Start
End
Read
RFIDs
Determine
clothing
type
Determine
clothing
volume
Read
water
level
Optimize water
temperature & level,
detergent
concentration, cycle
Fill Spin
Drain
Agitate
Water
Water
level, detergent
level, detergent
concentration
concentration
OK?
OK?
Water level
Water level
OK?
OK?
Read
water
level
Drain
Water level
Water level
OK?
OK?
Fill
Agitate
Water level
Water level
OK?
OK?
Read
water
outflow
Water outflow
Water outflow
adequate?
adequate?
Spin
Read water
outflow &
detergent
concentration
Water
Water
outflow, detergent
outflow, detergent
concentration
concentration
OK?
OK?
Xmin
Xmin
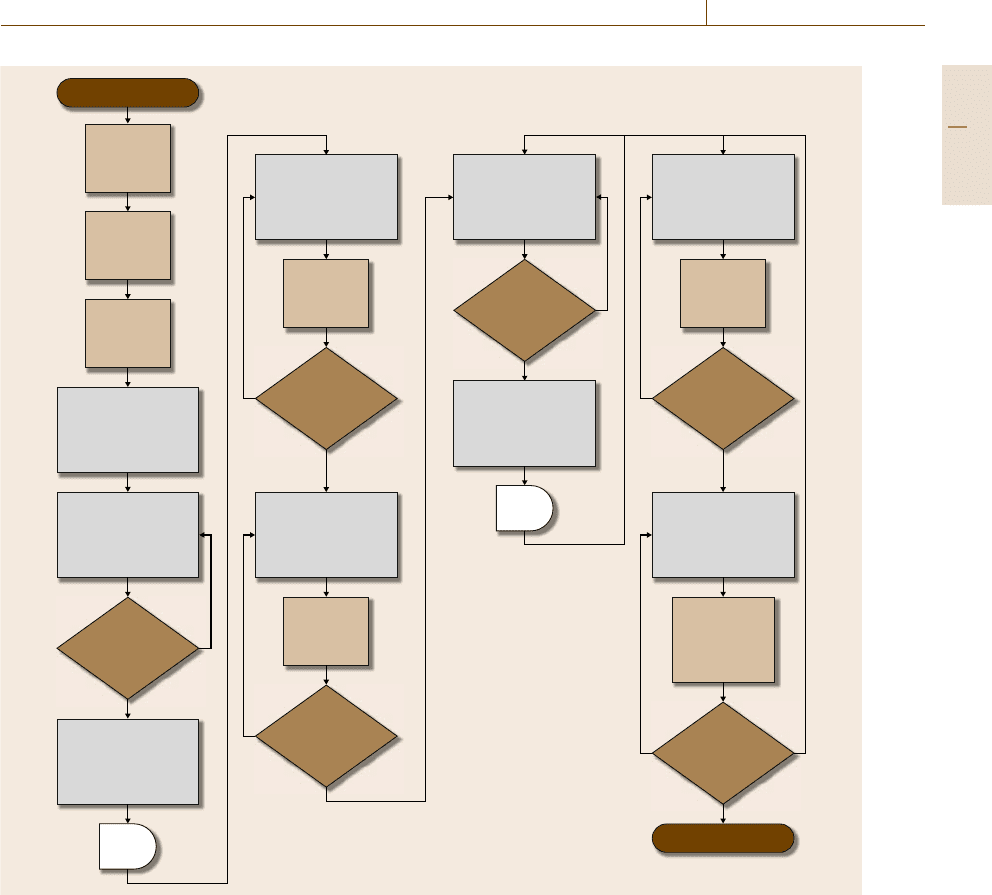
Fig. 83.2 More advanced clothes washer algorithm
tion on the compositionand care of the garment, such as
parameters dealing with appropriate water temperature,
detergent type, and washing cycle. RFIDs contained
in prepared food packaging could contain information
on composition and instructions for preparation, such
as cooking temperature and time. Thus, RFIDspro-
vide access to a rich cache of information which can
be leveraged for automation. The term RFID in this
context is not intended to pertain to any specific ra-
dio technology or technical standard, but to the general
concept of wireless, short-range, passive information
retrieval.
Now, returning to the algorithm presented above,
given a sufficiently capable array of sensors, we might
be able to automate the process as shown in Fig.83.2.
This revised algorithm is critically dependent on the
availability of sensors. Modern home appliances are be-
ing equipped with ever more sensors to enable cycle
optimization and efficiency, as well as process automa-
tion.
Part I 83.1
1472 Part I Home, Office, and Enterprise Automation
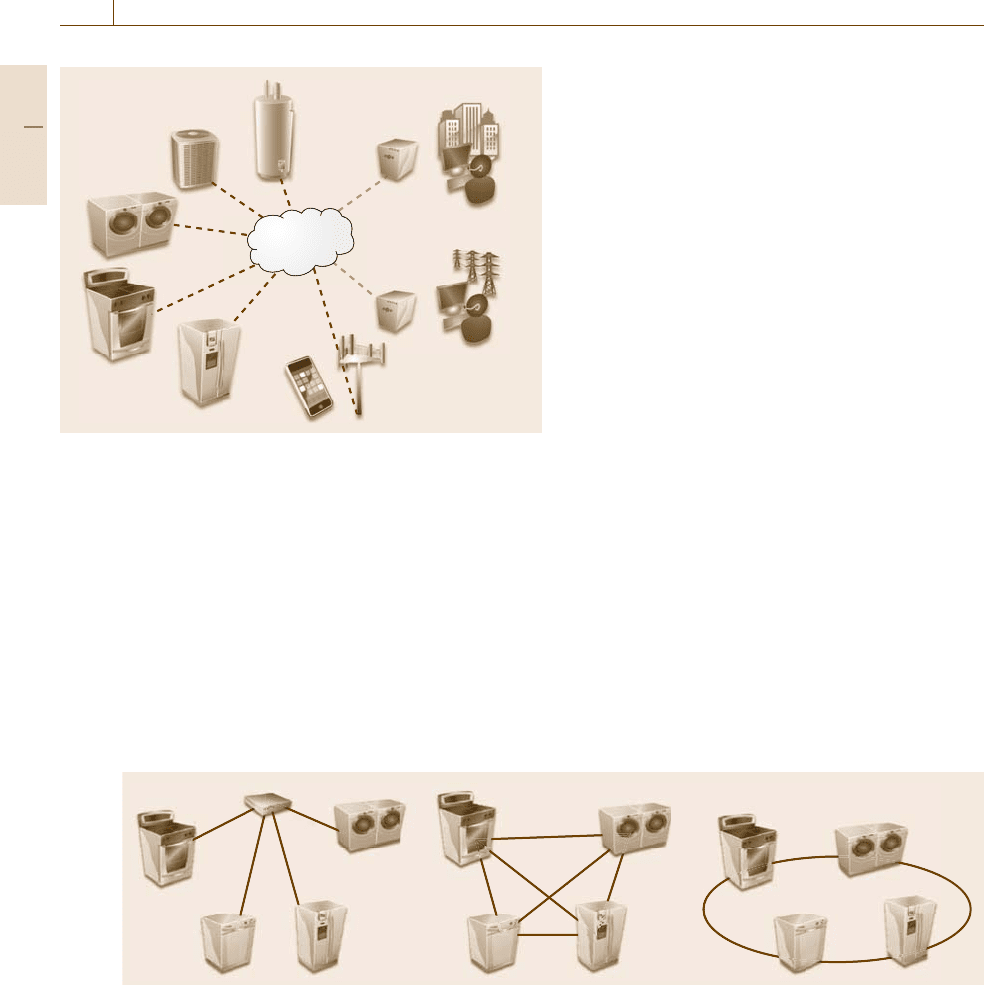
Fig. 83.3 Remote appliance communication
Connectivity
In addition to collecting and processing information
within the home appliance, automation opportunities
are further expanded if the home appliance is able
to communicate information externally. It can be ad-
vantageous to exchange information locally with other
appliances, or remotely with other entities such as the
user, the appliance vendor, or a third party such asa util-
ity (Fig.83.3).
These appliance area networks (AANs) can be re-
alized in any of a number of topologies, such as star,
mesh, and ring (Fig.83.4).
Fig. 83.4 AAN topologies
In order to communicate with entities outside the
AAN, though, an Internet gateway is often required.
The AAN’s Internet gateway could be something as
simple as a broadband modem, or it could be something
more intelligent, for example, in the case that the appli-
ances and/or the networking technology do not natively
support a full suite of internet protocols such as trans-
mission control protocol/Internet protocol (TCP/IP),
dynamic host configuration protocol (DHCP), and do-
main name system (DNS).
AANs can utilize any number of communi-
cation protocols including IEEE 802.3 Ethernet,
IEEE 802.11 wireless local-area network (LAN),
IEEE 802.15.4 low-rate wireless personal area network
(PAN), and a multitude of public cellular networking
technologies.
Once home appliances are networked together and
connected to the Internet, boundless opportunities for
automation exist. Some of these include:
•
Automatic distribution of information amongst the
appliances, for example, time of day
•
Automatic coordination and optimization of electric
power, water, and natura-gas usage
•
Automatic status reporting and remote appliance
control
•
Automatic performance analysis and reporting
•
Automatic fault detection and reporting.
At thetime ofthis writing, home appliance Internet con-
nectivity and some of the applications given above are
becoming available commercially.
83.2 Application Examples, Guidelines, and Techniques
83.2.1 Refrigeration
It has been stated previously that the basic func-
tion of the most widely used home appliance – the
refrigerator – has not changed significantly since its in-
ception. There are, however, opportunities to automate
the fridge’s function significantly. The penultimate in
refrigeration – the smart fridge – would possess at least:
Part I 83.2
Customer service
back office
Internet
Power company
back office
Automation in Home Appliances 83.2 Application Examples, Guidelines, and Techniques 1473
Table 83.1 Smart refrigerator food inventory
Type Subtype Instance Inventory date Expiry date Capacity Fill level
Milk 2% 1 23-Apr 10-May 4L 30%
Milk 2% 2 01-May 18-May 4L 100%
Olives Green 1 23-Apr 06-Dec 200g 100%
Beer Duff 1 23-Apr N/A 6 17%
Carrots N/A 1 23-Apr N/A 0.5kg 80%
... ... ... ... ... ... ...
•
Automatic food inventory
•
Automatic quality management.
In the basic implementation of the smart fridge con-
cept, the type and quantity of refrigerated food would
be stored in a database by the refrigerator. As items
are placed in the fridge, an identifier – such as an
RFID tag – is read. Similar functionality could be im-
plemented via universal product code (UPC) symbol
instead of RFID, but this would require some user in-
tervention (the scanning of the symbol) and would this
represent asemiautomatic process. The tag indicates the
food type, the product brand name, the container size or
Start
End
Read
RFID
Weigh
food
item
Food item placed
in fridge
No
No
No
No
Yes
Yes
Yes
Yes
Compare expiry
date with
today's date
Food item
Food item
spoiled?
spoiled?
Food item
Food item
removed from
removed from
fridge?
fridge?
Food item
Food item
returned to
returned to
fridge?
fridge?
Almost
Almost
out?
out?
Xmin
Issue food
spoilage warning
Add food item to
shopping list
Add food item to
shopping list
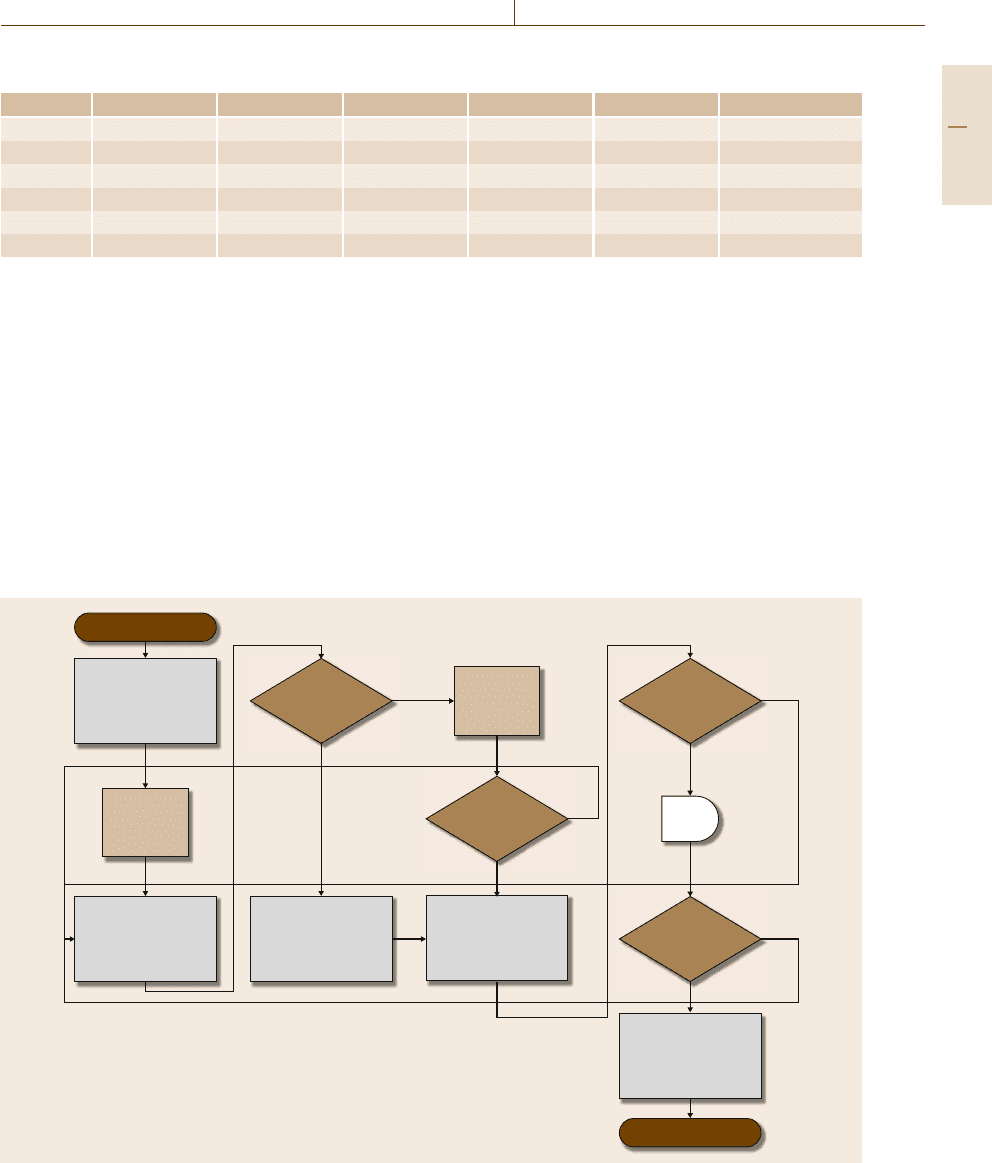
Fig. 83.5 Smart refrigerator inventory maintenance
weight, the use-by date, and any other information rel-
evant to the inventory process. To this the fridge adds
each item’s purchase date, physical location, and other
information (Table 83.1). As food is consumed, the
relevant database entry is updated; for example, a half-
gallon container of milk weighing 900g is determined
to be just under half full.
Several conditions trigger the ordering of food. If
the food container is not returned to the fridge within
a certain period of time, then the food is presumed to
be fully consumed and the smart fridge flags the item
for replacement. Similarly, if the container is returned
to the fridge, but the fridge determines that the con-
Part I 83.2

1474 Part I Home, Office, and Enterprise Automation
tainer’s contents havereached acritically low level, then
the item is also flagged for replacement (Fig.83.5). Fur-
ther, if the item is nearing its use-by date, then the item
is marked for replacement.
Either automatically or pursuant to a demand by the
user, a shopping list can be generated. Using Internet
connectivity, the list can be sent directly to an online
grocer for delivery, or to a bricks-and-mortar grocer for
preparation and eventual collection by the user, or to the
user’s computer or mobile phone. Alternatively, the list
can be sent over the AAN to a printer and hand-carried
by the user to the market, or simply displayed on the
fridge’s own video display device (Fig.83.6).
The smart fridge concept further is conducive to
maximizing food freshness and safety. Detailed knowl-
edge of the fridge contents permits optimization of
temperature and humidity so as to extend food fresh-
ness. And since the smart fridge has retained the use-by
date for each item in its database, any food nearing its
end-of-life can result in safety alerts to the user and
automatic reordering or addition to the shopping list.
Advanced implementations of the smart fridge con-
cept include recipe cognizance. In one realization,
digital recipes – utilizing extensible markup language
(XML) or an appropriate means to identify informa-
tion elements within a recipe – are downloaded to the
fridge over the Internet/AAN, with the fridge alerting
the user as to which ingredients are lacking, and or-
dering them (or adding them to the shopping list) as
necessary. In another realization of recipe cognizance,
the smart fridge alerts the user as to which recipes can
Grocery list
• Milk
• Olives
• Beer
Grocery order
• Milk
• Olives
• Beer
Grocery list
• Milk
• Olives
• Beer
Grocery list
• Milk
• Olives
• Beer
Grocery store
Fig. 83.6 Shopping list generation and notification
be prepared with the ingredients on hand by searching
the Internet for digital recipes which are matches to the
fridge inventory.
Clearly, the smart fridge is dependent on all of the
enabling technologies described previously: a compre-
hensive array of sensors, microprocessor control, and
connectivity.
83.2.2 Cooking
Cooking is, by its very nature, a labor-intensive process.
However, there are several opportunities for further au-
tomation of the processes performed by each of the
major cooking appliances, namely, the cook top (stove),
microwave oven, and convection oven. Some possibili-
ties are as follows.
Often, the temperature of convection ovens and
cook tops is not regulated, but controlled indirectly.
Rather than controlling the temperature, the appliance
controls the amount of energy dissipated. The vessels
used forcooking in convectionovens –and oncook tops
in particular – while not part of the appliance per se,
are critical components in the cooking process. Given
the nature of temperature regulation, the cooking ves-
sel is not integrated into the appliance’s temperature
regulation mechanism. Thus, as ingredients are added
to the cooking vessel, temperatures fluctuate. With ap-
propriate sensors, vessel temperature can be stabilized,
with heat being added as sudden drops in temperature
are detected, thus automating what would otherwise be
the manual process of raising and lowering the energy
consumption rate.
For all cooking appliances, automated doneness
detection is possible. Optical sensors and internal tem-
perature probes can be used to cook precisely to the
desired doneness; for example, most meats are cooked
to a desired internal temperature, depending on personal
preferences for doneness. Temperature sensors can be
used to cook precisely to this temperature, without
over- or undershooting,with the appliance subsequently
keeping the meat warm without continuing to cook it.
(Note that, while temperature probes are often available
from third parties, they are strictly external and not inte-
grated with the cooking appliance’s temperature control
logic.)
Further, a sufficiently rich portfolio of probes
enables more refined cooking cycles; for example, tra-
ditionally, we might set a convection oven to 232
◦
C
for 10min, then turn the temperature down to 163
◦
C
for 2h. A smart ovencouldbeprogrammedtofirst
sear, then cook to an internal temperature of 60
◦
C,
Part I 83.2