Ніколаєнко А.М. Методичні вказівки до лабораторного практикуму. Частина І
Подождите немного. Документ загружается.


31
2 Подати напругу на щит КВП, увімкнути прилад і ручку задавача
перевести у нульове положення .
3 Збалансувати вимірювальний блок регулятора за допомогою органів
“Уст.0” і “Коректор” , завчасно встановивши задавач на нуль, а усі органи
настройки регулятора у початковий стан і ні в якому разі не вимикаючі
настройку інтегральній складовій. Якщо неможливо досягти повного балансу і
має місце “перекидка” на світлових діодах, за допомогою органу ∆ збільшити
значення зони нечутливості до тих пір , поки не зникне режим автоколивань.
4 Відградуювати орган настройки пропорційної частини α
n
.Для цього
вимкнути диференціальну складову закону регулювання і установити
максимальне значення τи. При різних значеннях α
n
задавачем подавати на вхід
регулятора ступінчастий сигнал і фіксувати на вторинному приладі РП160
значення вихідного сигналу Р27 . За отриманими даними знайти коефіцієнти
передачі регулятора
вх
вих
з
Х
Х
К
∆
∆
= і побудувати графік залежності Κ
р
=ƒ(α
n
).
5 Відградуювати орган настройки сталої часу інтегрування . При
вимкнутій диференційній складовій закону регулювання , для трьох-чотирьох
значень α
n
і різних положеннях органу настройки τ
u
зняти криві розгону
регулятора , подаючи на його вхід ступінчастий сигнал . Швидкість діаграми
вторинного приладу РП160 , який реєструє вихідний сигнал регулятора ,
повинна бути такою , щоб графік був розтягнутий у часі. За отриманими
результатами установити час подвоєння Т
под
вихідного сигналу пропорційної
частини під дією інтегруючої складової закону регулювання. Цей час
характеризує собою сталу часу ізодром Т
із
=τ
і
ф
К
n
. Із цього співвідношення
потрібно установити фактичне значення сталої часу інтегрування τ
і
ф
побудувати графіки залежності τ
і
ф
= ƒ(τ
u
), τ
і
ф
= ƒ(Κ
Ρ
).
6 Відградуювати орган настройки сталої часу –диференціювання τ
д
.
При максимальному значенні інтегрувальної складової закону регулювання ,
для трьох – чотирьох значень α
n
і різних положеннях органу настройки τ
д
зняти
криві
розгону регулятора , подаючі на його вхід ступінчастий сигнал.
Швидкість діаграми вторинного приладу РП160 повинна бути такою , щоб
графік вихідного сигналу регулятора був розтягнутий у часі .
За отриманими результатами встановити сталу часу випередження Т
в
, для
чого до низхідної частини графіка на діаграмі провести дотичну у точці
найбільшої швидкості зменшення до пересікання її з віссю часу. Значення часу
у точці пересікання характеризує собою Т
в
. Користуючись співвідношенням
Т
д
ф
=Т
в
К
р
знайти фактичне значення сталої часу диференціювання Т
д
ф
і
побудувати графік Т
д
і
=ƒ(τ
д
), Т
д
ф
=ƒ(К
р
).
7 Зняти кілька кривих розгону регулятора , який реалізує ПІД- закону
регулювання, при різних настройках α
n
,τ
u
, τ
д
.
32
8 За результатами роботи зробити висновки про вплив органів
настройки на динамічні властивості регулятору , а також установити ступінь їх
взаємозв’язку.
4.6 Зміст звіту.
Звіт повинен мати назву виконаної роботи . Крім цього необхідно привести
схему регулятора , а також формули та графіки , які розкривають його динаміку
і суть роботи. Результати досліджень мають бути представленні у вигляді
таблиць та графіків, з відповідними висновками.
4.7 Питання для самоперевірки
1 Як реалізуються закони регулювання у Р27?
2 Що собою уявляє ланка у колі негативного зворотного зв’язку та як вона
впливає на роботу регулятора?
3 Як будується передатна функція регулятора ?
4 Якою ланкою є виконавчий механізм і яка його роль у формуванні
законів регулювання?
5 За рахунок чого змінюється тривалість імпульсів при зміні положення
органу “t
u
” ?
6 Як впливає коефіцієнт передачі регулятора на його динамічну
характеристику ?
ЛАБОРАТОРНА РОБОТА № 5
ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИКИ РЕГУЛЮВАЛЬНОГО
АНАЛОГОВО БЛОКА Р17 КОМПЛЕКСА ТЕХНІЧНИХ ЗАСОБІВ
“КАСКАД2”
МЕТА РОБОТИ – вивчити конструкцію , принцип дії і особливості
експлуатації регулювального блока, дослідити його статичні та динамічні
характеристики, побудувати градуйовані характеристики органів настройки.
5.1 Загальні відомості
Блок регулювальний Р17 є аналоговим ПІД- регулятором з уніфікованими
вихідними сигналами 0-5 мА. Блок вміщує модуль регулювальний РО17 .1,
джерело живлення ИПС – І і модуль вимірювальний ИОО1.1.
Вимірювальний модуль реалізує підсумовування і масштабування вхідних
сигналів .
Регулювальний модуль виконує формування вихідного безперервного
електричного сигналу блока у відповідності до законів П-, ПД-,ПІ чи ПІД-
регулювання , двобічне обмеження вихідного сигналу , демпфування вхідного
сигналу , а також (у комплекті з зовнішніми блоками керування)ручне
33
керування вихідним сигналом і безударне перемикання режимів роботи.
5.2 Будова приладу
Конструктивно Р17 складається із збірного шасі , жорстко зв’язаного з
передньою панеллю і зварного корпуса. Корпус розрахований на щитовий
монтаж .
Органи настройки регулювального блока розміщені на бокових панелях
усередині корпусу, з правої сторони шасі. Щоб забезпечити доступ до органів
настройки ,його шасі висувається з корпусу . Для цього необхідно натиснути
кнопку замка у нижній частині передньої панелі і потягти шасі на себе.
На панелі регулювального модуля розміщені:
К
н
– орган плавної зміни коефіцієнта передачі ;
Т
и
- орган плавної зміни сталої часу інтегрування ;
Т
д
- орган плавної зміни сталої часу диференціювання;
Т
дф
- орган плавної зміни сталої часу демпфірування;
“Огр. Мин.” І “Огр . Макс.” – ручки зміни рівній обмеження вихідного
сигналу ;
комутаційні гнізда з перемичками для дискретної зміни множника
коефіцієнта передачі / “х1”, “хх10”/ ;
комутаційні гнізда з перемичками для дискретної зміни множника сталої
часу інтегрування Т
и
і вимикання інтегральної складової закону регулювання /
“Выкл.” , “х1”, “х10”/
На панелі вимірювального модуля розміщені :
“α
2
”, “α
3
”, “α
и
” – органи плавної зміни масштабних коефіцієнтів передачі
по входам ;
“Корректор” – орган плавної зміни сигналу коректора ;
“Уст. 0” – орган балансування вимірювальної схеми ;
“+”, “-“ – комутаційні гнізда з перемичкою для зміни полярності сигналу
корекції ;
α
зд
- орган плавної зміни діапазону дії зовнішнього задавача. К
н
, Т
и,
Т
д,
Т
дф, ,
“Огр. Мин.” І “Огр Макс.” Установити у крайнє ліве положення
5.3 Опис роботи регулятора блока
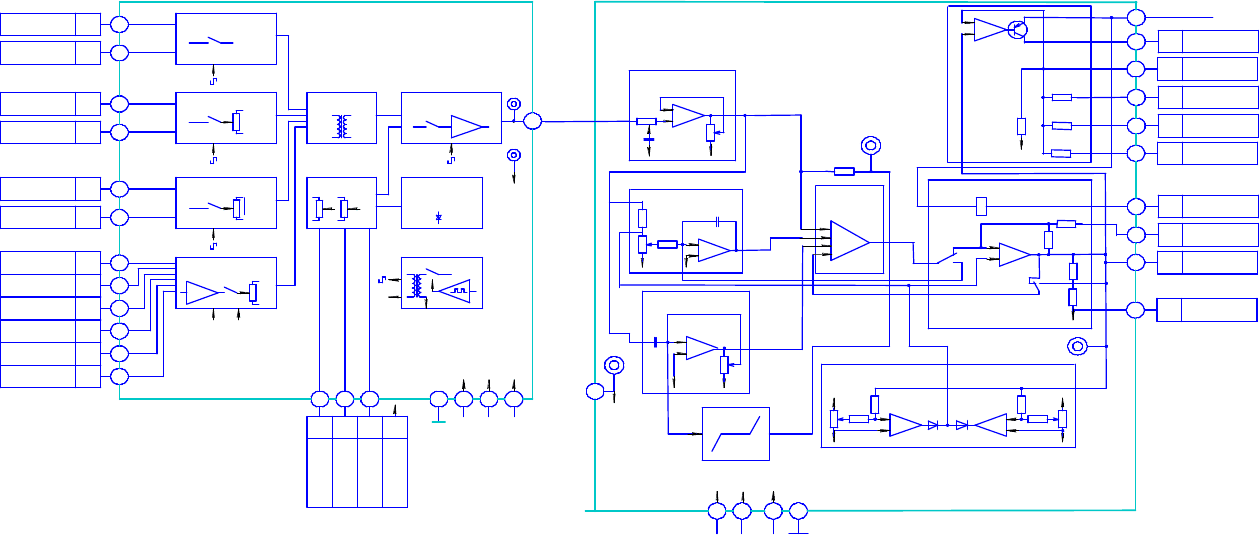
Функціональна схема регулювального блока Р17 приведена на рис.7.
Вимірювальний модуль И001.1 реалізує підсумовування і масштабування
вхідних сигналів, введення заданого значення регульованої величини,
формування і підсилення сигналу відхилення регульованої величини від
заданого значення і має наступні функціональні вузли:
31
Общаяточка
входаХвх
28
30
26
27
29
ВХОДХ41
0-5мА
ВХОДХ41
0-5мА
ВХОДХ43
0-20 мА
ВХОДХ44
0-10 В
ВХОДХ45
-1...0...+1 В
УСИЛИТЕЛЬ-
МОДУЛЯТОР 4
ОТ
±
МОДУЛЯТОР 3
МОДУЛЯТОР 2
МОДУЛЯТОР 1
24
ВХОДХ3
0-5мА
25
ВХОДХ3
0-5мА
22
ВХОДХ2
0-5мА
23
ВХОДХ2
0-5мА
20
ВХОДХ1
0-5мА
21
ВХОДХ1
0-5мА
a
2
a
1
=1
a
3
a
4
СУММАТОР
КОРРЕКТОР
ДЕМОДУЛЯТОР-
УСИЛИТЕЛЬ
ИСТОЧНИК
ОПОРНОГО
НАПРЯЖЕНИЯ
ГЕНЕРАТОР
±
+
Общая точка
входаХвх
ВХОД Х43
0 -20мА
ВХОД Х44
0 -10В
ВХОД Х45
-1.,0...+1В
10
8
12
14
16
18
20
22
24
26
28
30
23
21
6
4
13 21 11
3
"
e
"
"
ОТ
"
ОТ
1 17 15
ИОО1.1
19
ОТ
У
1
ВХОДНОЙ
УСИЛИТЕЛЬ
ОТ
3
ВыходУ
1
0-10 В
27
2
ОБЩАЯТОЧКА
(ОТ)
29
10
19
25
Р017.1
117 1519
+15 ВОТ -15 В
12
Ручное
управление
Переключатель
управления
+15 ВОТ -15 В
"k
П
"
ОТ
У
3
ДИФФЕРЕНЦИАТОР
ОТ
"T
Пд
"
ИНТЕГРАТОР
У
2
ОТ
ОТ
"Тиз"
31
ОТ
ОТ
HE
У
4
α
ЗУ
OT
"ТДФ
"
ОГРАНИЧИТЕЛЬ
У5
ОТ
"Огр.
мин."
У8
ОТ
"Огр.
макс."
СУММАТОР
У7
ОТ
8
11
7
5
13
6
Для 4-20мА
кзажиму 29
5
9
7
4
Токовый
ВыходУ
2
ОТ
18
У6
ПРЕОБРА-
ЗОВАТЕЛЬ
"напряже-
ние-ток"
+27 В
Токовый
ВыходУ
2
Для 4-20мА
кзажиму 29
Для 4-20мА
кзажиму 21
U
ε
У
ВЫХОДНОЙУСИЛИТЕЛЬ
KV
KV
OT
S
Рис.7 Функціональна схема Р17
- модулятори 1, 2, 3 для перетворення уніфікованих вхідних сигналів
постійного струму на сигнали напруги змінного струму. У модуляторах 2, 3
вхідні сигнали множаться додатково на відповідні масштабні коефіцієнти
2
α
і
3
α
;
- підсилювач – модулятор 4 для складання сигналів постійного струму,
перетворення суми на сигнал змінного струму і множення на масштабний
коефіцієнт
4
α
;
- суматор, який забезпечує гальванічне розділення всіх підсумованих
вхідних сигналів один від одного і від вихідного сигналу;
- коректор для ручного коригування вихідного сигналу;
- демодулятор – підсилювач для перетворення вихідного сигналу суматора
на напругу постійного струму і формування вихідного сигналу модуля (сигналу
відхилення);
- генератор імпульсів прямокутної форми для комутації ключів модулятора
і демодулятора;
- джерело опорної напруги для живлення вузла коректора і зовнішнього
потенціометричного задавача, який вмикається до блоку.
Статична характеристика вимірювального модуля описується рівнянням:
кор5
5
1i
i4433221
XXXXXXE ±−±⋅±⋅±±=
∑
=
ααα ;
де Х
1
, Х
2
,..., Х
5
– вхідні сигнали модулятора, отримані від первинних
перетворювачів, у відносних величинах від діапазону зміни;
1
α
,
2
α
,
3
α
–
масштабні коефіцієнти.
Регулювальний модуль Р017.1 складається з вхідного підсилювача,
інтегратора, нелінійного елемента, суматора, вихідного підсилювача,
перетворювача напруги у струм, обмежувача вихідного сигналу і вузла
безударного перемикання режимів роботи.
Вхідний підсилювач У1, створений за високоомною інтегральною
мікросхемою, на виході якої встановлена аперіодична ланка. Коефіцієнт
передачі повільно регулюється потенціометром “К
n
”, стала часу демпфування –
змінним резистором “Т
дф
”.
Інтегратор збудовано на високоомному інтегральному підсилювачі У
2
.
Стала часу інтегрування Т
і
регулюється повільно повзуном потенціометра “Т
і
” і
дискретно за допомогою перемикача.
Нелінійний елемент у колі негативного зворотного зв'язку, який охоплює
суматор і диференціатор при великому вихідному сигналі диференціатора, має
діоди, увімкнені зустрічно-паралельно.

34
Суматор виконано на підсилювачі У
4
. Вихідні сигнали інтегратора і
диференціатора, а також сигнал негативного зворотного зв'язку з виходу
підсилювача подаються на інвертуючий вхід У
4
. Вихідний сигнал вхідного
підсилювача У
1
і сигнал місцевого негативного зворотного зв'язку подаються
також на інвертуючий вхід підсилювача У
4
.
Вхідний підсилювач У
7
виконаний за інтегральною мікросхемою та
транзисторі, що працює в режимі емітерного повторювача. Вихідний сигнал
емітерного повторювача надходить на вхід блока за напругою У
1
(0-10В) і на
вхід підсилювача У
6
перетворювача напруги на струм. Вихідний підсилювач і
суматор охоплені негативним зворотним зв'язком. Ступінь цього зв'язку
дискретно змінюється за допомогою перемикача, при цьому дискретно
змінюється коефіцієнт передачі блока К
п
.
Перетворювач напруги у струм виконаний на підсилювачі У
6
і
транзисторах, охоплених глибоким негативним зворотним зв'язком при
діапазоні вихідного сигналу 0-5mA. При діапазонах вихідного сигналу 0-20 mA,
4-20 mA паралельно опору у коло зворотного зв'язку вмикаються відповідні
допоміжні резистори.
Обмежувач вихідного сигналу має інтегральні мікросхеми У
5
і У
7
що
працюють у режимі порогових елементів і джерело опорної напруги – 10В.
Опорна напруга подається на потенціометр “Обм. мін.” і “Обм. макс.” за
допомогою яких встановлюються відповідні рівні обмеження. Напруга з виходу
порогових елементів через діоди подається на вхід вихідного підсилювача У
7
і
на вхід підсилювача У
2
інтегратора.
Передаточна функція регулювального блоку має вигляд:
()
⋅+
⋅
+⋅
+⋅
= PT
PT
1
1
1PT
K
pW
в
іздф
p
,
де
(
)
np
KfK
=
– коефіцієнт передачі; Т
дф
– стала часу демпфування;
іріз
TKT
⋅
=
– стала часу ізодрому;
рдв
K/TT
=
– стала часу випередження.
Вузол безударного перемикання режимів роботи має реле KV з
перемикаючим контактом.
У режимі ручного керування (при спрацьовуванні реле KV) на вхід
вихідного підсилювача через резистор подається сигнал 0-10В постійного
струму від зовнішнього блоку керування. Сигнал, пропорційний вихідному
сигналу вихідного підсилювача, надходить на суматор, а з його виходу через
контакт реле KV – на вхід інтегратора, який відслідковує вихідний сигнал
блоку, що забезпечує безударність перемикання з ручного керування на
автоматичне. При вимкнутій інтегральній складовій закону регулювання
безударність перемикання з ручного керування на автоматичне не
забезпечується.
35
Основними параметрами настройки блоку є: коефіцієнт передачі К
n
, стала
часу інтегрування Т
і
і стала часу диференціювання Т
д
.
Залежно від рівня пульсування регульованих параметрів необхідне
значення сталої часу демпфування встановлюють органом настройки “Т
дф
”.
Якщо за технологічних умов повний діапазон зміни вихідного сигналу
неможливий, при настройці встановлюють потрібний діапазон ручками “Обм.
мін.” і “Обм. макс.”.
5.4 Опис лабораторної установки
Дослідний аналоговий регулювальний блок Р17 установлений на щиті .
Під ним розташований струмковий задавач ЗУ-05 . Вихідний сигнал Р17
фіксується на діаграмній стрічці вторинного приладу РП160 . У правій частині
щита КВП установлений перемикач режимів роботи “А” і “Р”, а зліва кнопки
ручного керування роботаю виконавчого механізму “Більше-Менше” .
5.5 Порядок виконання роботи
1 Ознайомитися з інструкцією і лабораторною установкою .
2 Увімкнути установку і перевести ручку перемикача режимів роботи у
положення “А”.
3 Провести балансування регулювального блока . Для цього ручку задавача
установити на нуль . Висунути шасі Р17 з корпусу і на боковій панелі РО17.1
органи настройки Т
дф
, Т
д ,
Т
и ,
К
н ,
“Огр. Мин.” І “Огр . Макс.” установити у
крайне нижнє положення . Перемичку дискретної зміни К
н
установити у
положення “х1” , а перемички дискретної зміни Т
и
і Т
д
– у положення “Выкл.”.
На боковій панелі ИОО1.1. органи “α
2
”, “α
3
”, “α
4
” установити у нульове
положення .
Регулятор балансується по вторинному приладу РП160 спочатку органом
“Уст. 0”, а потім точно коректором до тих пір , доки стрілка приладу не стане
на нульове значення .
4 Відградуювати орган настройки коефіцієнта передачі К
н
при вимкнутих
інтегральній та диференціальній складових закону регулювання . На вхід
регулятора за допомогою задавача подавати ступінчастий сигнал і фіксувати
вихідний за шкалою вторинного приладу РП160 . Розрахувати коефіцієнт
передачі регулятора К
р
.
5 Відградуювати орган настройки сталої часу інтегрування “Т
и
”.
Для трьох-чотирьох значень К
н
і вимкнений настройці Т
д
зняти криві
розгону регулятора при різних значеннях Т
и
, подаючи на вхід ступінчастий
сигнал і фіксуючи зміну вихідної величини на діаграмі РП160. Швидкість
діаграми повинна бути вибрана такою, щоб графіки вихідного сигналу

36
регулятора були розтягнуті у часі. Фактичне значення сталої часу інтегрування
Т
і
ф
=
р
із
К
T
розраховується по знайденої сталої часу ізодрома Т
із
, яка дорівнює
часу подвоєння вихідної величини пропорційної складової закону регулювання
під впливом інтегральної частини регулятора . побудувати графік Т
і
ф
=ƒ( Т
и
),
Т
і
ф
=ƒ(К
р
).
6 Відградуювати органи настройки сталої часу диференціювання Т
д
.
Для трьох-чотирьох значень К
n
і вимкненій настройці Т
и
зняти криві
розгону регулятора при різних значеннях Т
д
, подаючи на вхід ступінчастий
сигнал і фіксуючи зміну вихідної величини на діаграмі РП160. Швидкість
діаграми повинна бути вибрана такою, щоб крива розгону була розтягнутою у
часі. Фактичне значення Т
д
ф
=Т
в
⋅ К
n
установлюється по знайденій сталої часу
випередження Т
в
з графіків кривої розгону . Для цього до низхідної частини
характеристики проводиться дотична у точці найбільшої швидкості зменшення
до перетинання її з віссю часу і береться на ній відлік , що встановлює значення
Т
в
.
Побудувати графік залежності Т
д
ф
= ƒ(Т
д
) і Т
д
ф
=ƒ(К
р
)
7 Зняти декілька кривих розгону регулятора при ПІД-законі регулювання,
для різних настройках К
n
, Т
и
, Т
д
.
8 За результатами роботи зробити висновки про вплив параметрів
настройки на динамічні властивості регулятора, а також установити ступінь їх
взаємозв’язку.
5.6 Зміст звіту
Звіт повинен мати назву виконаної роботи, схему регулятора , а також
формули і графіки , що розкривають його динаміку і суть роботи. Результати
досліджень потрібно представити у вигляді таблиць і графіків, по яким зробити
висновки.
5.7 Питання для самоперевірки
1 Які закони реалізує Р17 і як вони формуються?
2 Органи настройки взаємозв’язані чи ні?
3 Як забезпечується безударне перемикання режимів роботи?
4 Що таке стала часу ізодрому і стала часу інтегрування?
5 Чим відрізняється стала часу випередження від сталої часу
диференціювання?
6 Які формули і графіки характеризують динаміку роботи регулятора?

37
ЛАБОРАТОРНА РОБОТА № 6
ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИК РЕЄСТРУВАЛЬНОГО ПРИЛАДУ
ДИСК-250 З ПРОПОРЦІЙНО-ІНТЕГРУВАЛЬНИМ РЕГУЛЮВАЛЬНИМ
ПРИСТРОЄМ
МЕТА РОБОТИ: вивчити конструкцію і принцип дії ДИСК-250 , зняти
статичну характеристику перетворення приладу і відградуювати настроювальні
елементи регулювального пристрою .
Загальні відомості
Реєструвальні прилади ДИСК-250, ДИСК-250И призначенні для
вимірювання і реєстрації активного опору , сили (тільки ДИСК-250 ) і напруги
постійного струму , а також неелектричних величин , перетворених у вказані
сигнали.
Прилади ДИСК-250 мають вхідні іскробезпечні електричні кола .
Прилади розраховані на роботу з вхідними сигналами:
- від термоелектричних перетворювачів ;
- від термоперетворювачів опору з номінальною статичною
характеристикою 0-5 мА, 4-20 мА, 0-5 В, 0-10 В, 0-50 мВ, 0-100мВ.
Сумарний опір лінії зв’язку і внутрішнього опору термоелектричних
перетворювачів не повинен перебільшувати 200 Ом. Опір кожного проводу
лінії зв’язку термоперетворювача опору з приладами не повинен
перебільшувати 5 Ом.
Прилади мають наступні вихідні пристрої:
- пристрій перетворення вхідних сигналів у безперервний електричний
сигнал 0-5 мА, чи 4-20 мА;
- пропорційно-інтегральний (ПІ) регулятор;
- регулювальний з безконтактним , а для ДИСК-250 з контактним
(релейним) виходом для формування трипозиційного регулювання;
- два двопозиційні пристрої сигналізації з релейним виходом;
Номінальна статична характеристика перетворювачів відповідає формулі:
( )
н
нв
н
нв
І
хх
хх
ІІІ +
−
−
−=
де І – значення інформативного параметра вихідного сигналу , мА;
І
в
, І
н
– відповідно верхня та нижня межі значень вихідного сигналу , мА;
Х – значення інформативного параметра вхідного сигналу мВ, Ом / під
інформативним параметром розуміють середнє значення сигналу за час не
менше 20 мс/;
Х
в
, Х
н
, - відповідно верхня та нижня межі значень вхідного сигналу мВ,
Ом.
38
Будова і робота приладу
Прилади конструктивно виконані у прямокутному корпусі ,
пристосованому для щитового монтажу , корпус зачиняється осклованою
кришкою з установленою шкалою.
На кришці також розміщені:
- кнопки і опори установлення меж позиційного регулювання і
сигналізації;
- індикатори спрацьовування пристроїв регулювання і сигналізації;
- індикатор зеленого кольору, що сигналізує про вимикання приладу із
мережі ;
- індикатор червоного кольору, що сигналізує про аварійний стан приладу;
Для приладів з ПІ – регулювальним пристроєм установлений тумблер А-Р
А – увімкнений ПІ – регулювальний пристрій;
Р – увімкнений ручний задавач, а також кнопка і опір установлення
завдання регулювальному пристрою.
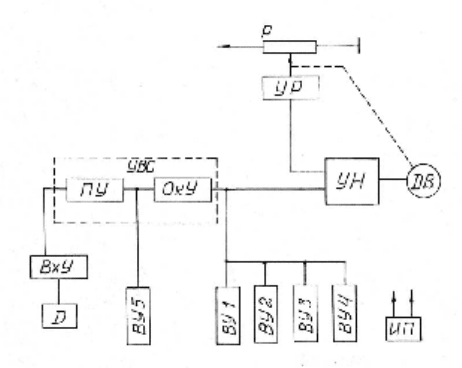
В основі роботи приладу покладений принцип електромеханічного
слідкуючого зрівноваження , рис 8.
Рис.8. Функціональна схема приладу ДИСК – 250
У приладі ДИСК-250 вхідний сигнал від датчика D надходить до вхідного
пристрою ВхУ, де він нормується за нижньою межею вимірювання для
зручності його наступного перетворення. Крім того , вхідний пристрій має
джерело струму для живлення термоперетворювачів опору або для живлення
мідного опора температурної компенсації термо- Э. Р. С. холодних спаїв
термоелектричних перетворювачів.
У приладі ДИСК-250И вхідний сигнал від датчика D надходить до блоку
іскрозахисту, що захищає датчик від аварійного збільшення струму і напруги ,