Муромцев Ю.Л., Муромцев Д.Ю. Основы автоматики и системы автоматического управления
Подождите немного. Документ загружается.

Таким образом, на примере апериодического звена подробно рассмотрены вопросы получения одних динамических
характеристик по известным другим. Далее для остальных ТДЗ все динамические характеристики даются в форме спра-
вочного материала.
2.2.2. Усилительное звено
В усилительном (пропорциональном или безынерционном) звене связь между выходом и входом определяется про-
стейшим уравнением
(
)
(
)
tKx=ty , (2.25)
где
K
– коэффициент пропорциональности (передачи).
В принципе усилительное звено является некоторой идеализацией реальных процессов в ограниченном диапазоне
изменения
x
и y .
Все ДХ усилительного звена автоматически получаются из характеристик апериодического звена, если принять
0=T
. Эти характеристики (рис. 2.4) имеют вид:
•
передаточная функция
K=pW )( ; (2.26)
• переходная функция
(
)()
tK=th 1⋅ ; (2.27)
• функция веса
(
)()
tK=tW δ ; (2.28)
• АФЧХ
(
)
K=jW
ω
и
()
K=P ω ,
()
0=Q ω ; (2.29)
• АЧХ
(
)
K=M
ω
; (2.30)
• ФЧХ
(
)
0=
ω
ϕ
; (2.31)
•
ЛАЧХ
(
)
K=L 20lg
ω
. (2.32)
В устройствах автоматики примерами усилительного звена являются усилители, делители напряжения, датчики сиг-
налов, механические редукторы и др.
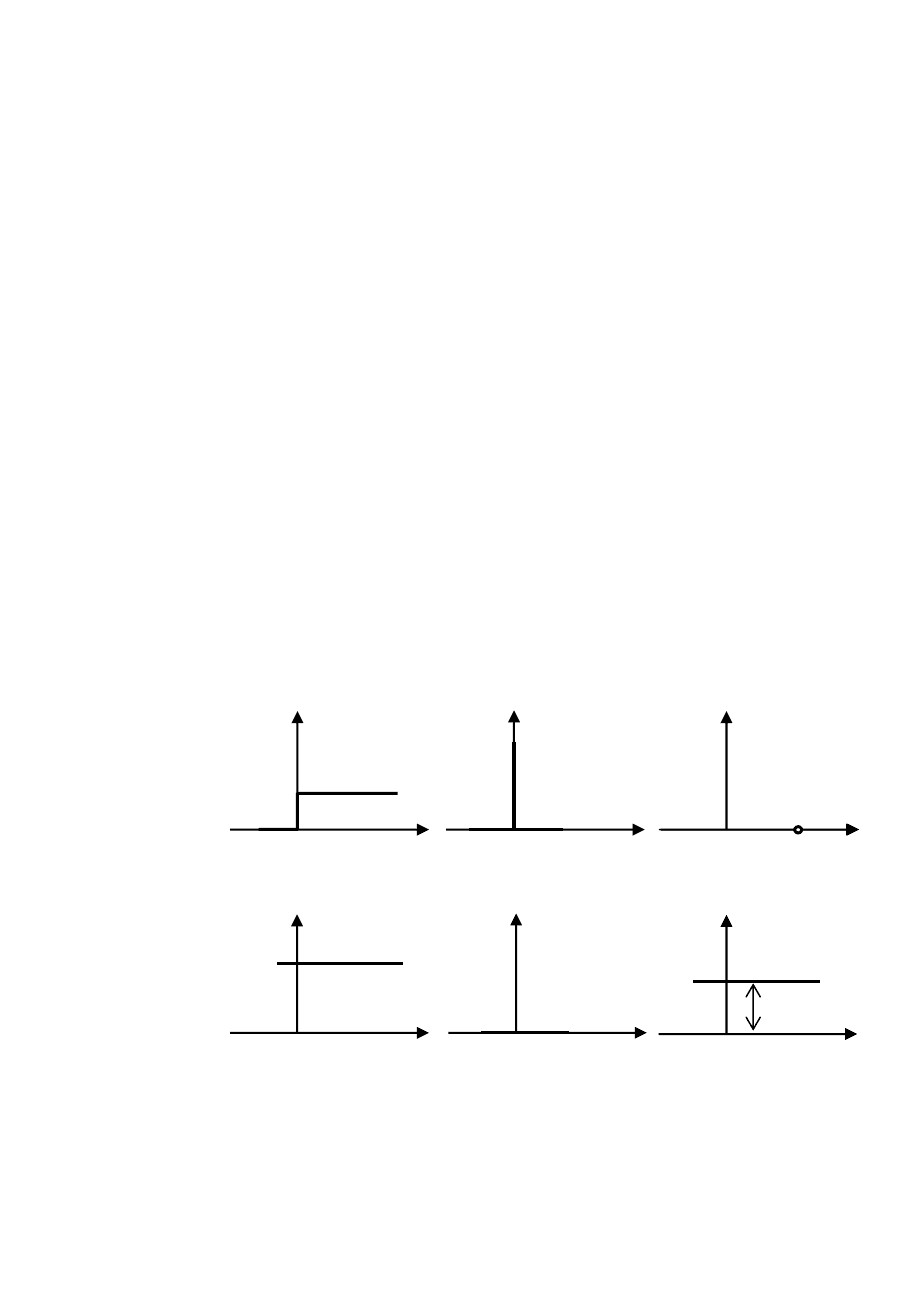
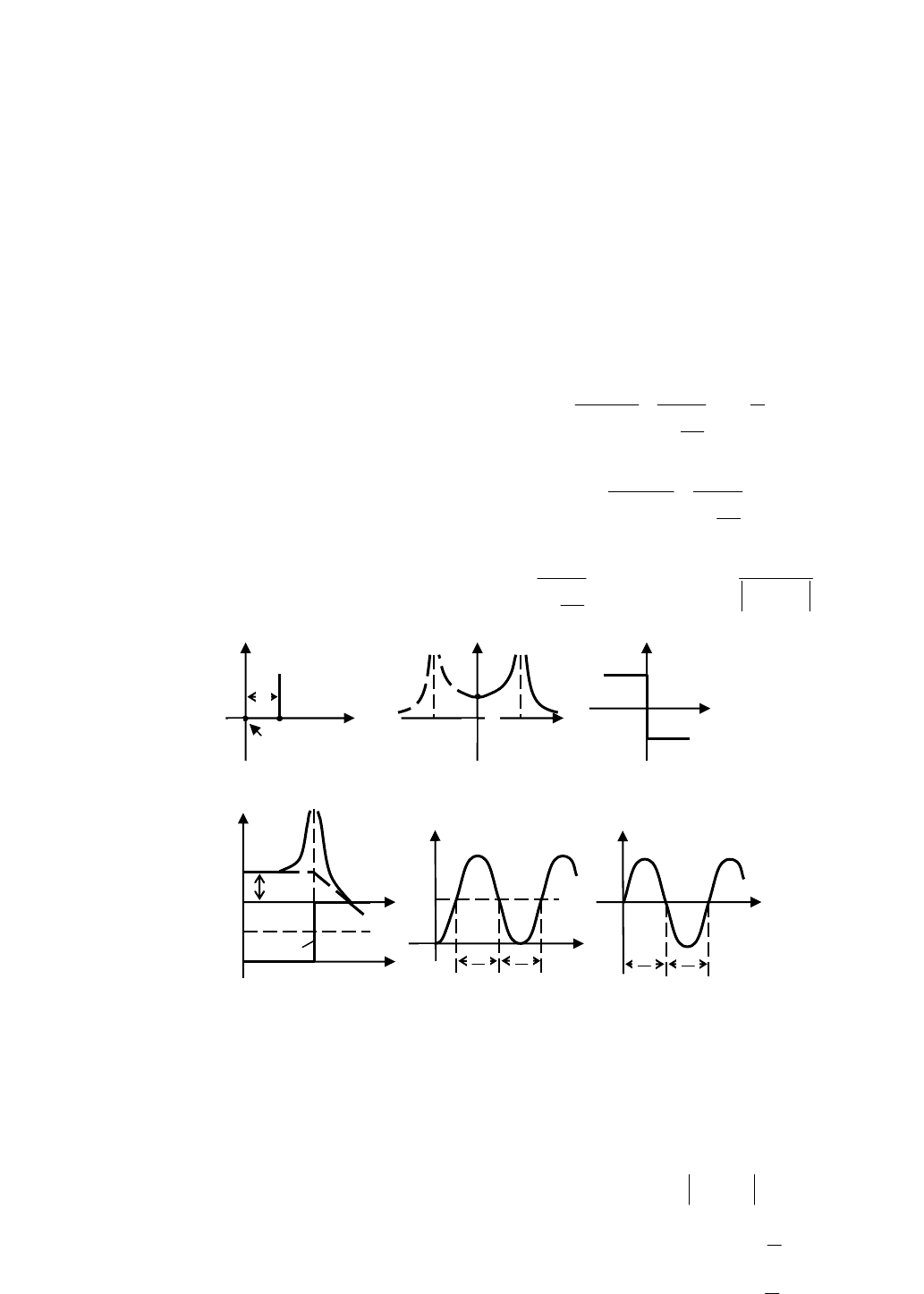
Рис. 2.4. Динамические характеристики усилительного звена:
а – переходная функция; б – весовая функция; в – АФЧХ;
г – P(ω) и АЧХ; д – ФЧХ; е – ЛАЧХ
2.2.3. Инерционное звено второго порядка
Дифференциальное уравнение для данного звена записывается в виде
(
)()
tKx=ty+yT+yT
&&&
1
2
2
(2.33)
W
ϕ
0
h
t
K
а)
jQ
P
0
K
P
ω
0
M
K
ϕ
ω
0
L
ω
0
Klg20
б) в)
г) д) е)
или в нормальной форме
(
)
tz=z
11
&
;
(
)()()
,
22112
tbx+tza+tza=z
&
(2.34)
где y=z
1
; y=z
&
2
;
2
2
1
1
T
=a −
;
2
2
1
2
T
T
=a −
;
2
2
T
K
=b
.
Значения параметров звена
KTT ,,
21
(соответственно baa ,,
21
) должны удовлетворять условию обеспечения веще-
ственности корней характеристического уравнения
01
1
22
2
=+pT+pT
, т.е.
04T
2
2
2
1
>T −
или
21
2T>T . (2.35)
Для параметров
21
, aa это эквивалентно условию
1
2
2
4a≥a
.
Используя операционную форму записи (2.33)
(
)
Kx=y+pT+pT 1
1
22
2
, можно получить передаточную функцию зве-
на
()
()()
pT+pT+
K
=
+pT+pT
K
=pW
43
1
22
2
11
1
, (2.36)
где
43143
2
2
2
11
43,
,,
42
T+T=TT>TT
T
±
T
=T −
. (2.37)
Из (2.36) видно, что инерционное звено второго порядка можно рассматривать как последовательное соединение
двух апериодических звеньев с постоянными времени
43
, TT . Такое звено иногда называют двойным апериодическим.
Временные характеристики звена приведены на рис. 2.5, их аналитические выражения, получаемые с использовани-
ем обратного преобразования Лапласа, имеют вид:
() ()
te
TT
T
+e
TT
T
K=th
T
t
T
t
11
4
43
4
3
43
3
⋅
−−
−
−
−
; (2.38)
() ()
tee
TT
K
=tW
T
t
T
t
1
4
3
43
⋅
−
−
−
−
. (2.39)
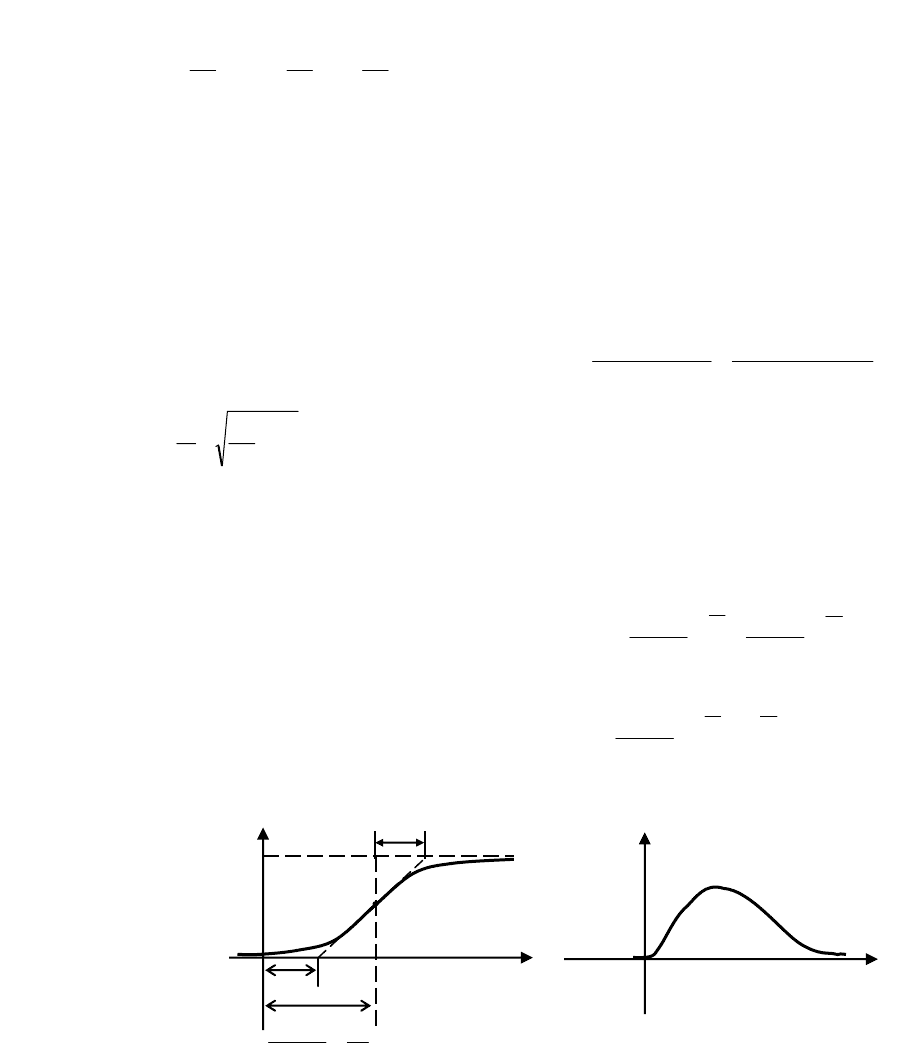
Рис. 2.5. Временные характеристики инерционного звена второго порядка:
а – h(t); б – W(t)
t
0
4
T
4
3
43
43
ln
T
T
TT
TT
−
K
h
1
T
а
)
W
0
t
б)
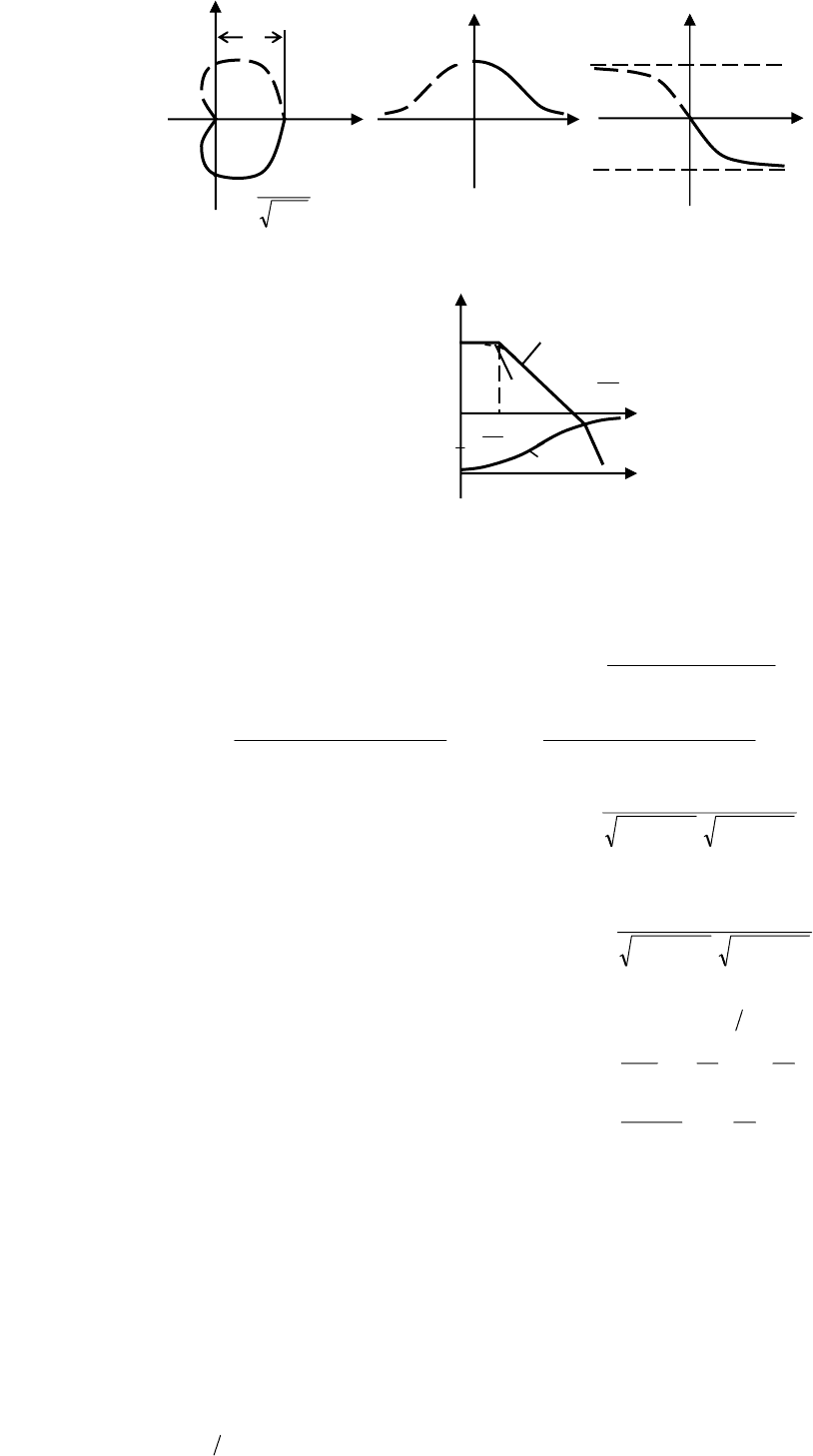
Рис. 2.6. Частотные характеристики инерционного звена второго порядка:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – асимптотическая ЛАЧХ
Частотные характеристики звена записываются в виде:
()
()()
43
11 TjTj
K
jW
ω+ω+
=ω
; (2.40)
()
(
)
()
()
(
)
()
;
1
;
1
1
2
4
2
3
42
4
2
3
2
43
2
4
2
3
42
4
2
3
2
43
2
TTTT
TTK
Q
TTTT
TTK
P
ω++ω+
+ω
−=ω
ω++ω+
ω−
=ω
()
2
4
22
3
2
11 TT
K
M
ω+ω+
=ω
; (2.41)
(
)
43
arctgarctg TT ω
−
ω
−
=
ω
ϕ
; (2.42)
()
2
4
22
3
2
11
lg20
TT
K
L
ω+ω+
=ω
; (2.43)
()
>ω
ω
<ω<
ω
<ω
=ω
.
1
,
;
11
,
;1,lg20
4
43
2
433
3
T
TT
K
TTT
K
TK
L
a
(2.44)
Здесь
()
ω
a
L – асимптотическая ЛАХ, ее первая асимптота с нулевым наклоном, вторая с наклоном 20 дб/дек и третья –
40 дб/дек. Графическое представление частотных характеристик приведено на рис. 2.6.
Данное звено широко используется на практике для описания динамических режимов двигателей постоянного тока,
фрагментов электрических схем, например, двухзвенного RC-фильтра нижних частот и др.
2.2.4. Колебательное звено
Дифференциальное уравнение данного звена в нормальной форме сохраняет вид (2.24), а уравнение (2.23) обычно
записывается с использованием относительного коэффициента затухания
ζ
, т.е.
() ()
tKxtyyTyT =+ζ+
&&&
2
2
, (2.45)
где T – постоянная времени (
T1
– собственная частота
q
).
K
jQ
P
0=ω
∞→
ω
0
0<
ω
43
1
TT
=ω
0
M
ω
а)
0
L
ω
ϕ
Klg20
0
40
0
a
L
3
1
T
20
(
)
ω
a
L
(
)
ω
L
4
1
T
ϕ
K
ω
ω
в)
б)
г)
180
°
–180
°
–180°
–90°
0
Уравнению (2.45) соответствуют передаточная функция и частотные характеристики:
()
1
212
2
222
+
ζ
+
=
+ζ+
=
p
q
q
p
K
pTpT
K
pW
; (2.46)
() () ()
=ω+ω=
ω−ζω+
=ω jQP
TTj
K
jW
22
21
(
)
() ()
;
41
2
41
1
222
2
22222
2
22
22
ωζ+ω−
ζω−
+
ωζ+ω−
ω−
=
TT
KT
j
TT
TK
(2.47)
()
()
21
222
2
22
41
ωζ+ω−
=ω
TT
K
M
; (2.48)
(
)
(
)
[
]
22
12arctg TT ω−ωζ−=ωϕ
; (2.49)
()
(
)
222
2
22
41lg20lg20 ωζ+ω−−=ω TTKL ; (2.50)
()
>ωω−
<ω
=ω
.
1
приlg20
;
1
приlg20
22
T
T
T
K
L
a
(2.51)
Следует заметить, что вторая асимптота в формуле (2.51) пересекает ось абсцисс в точке
TK= /ω
. Графики час-
тотных характеристик приведены на рис. 2.7, а – г.
Рис. 2.7. Частотные и временные характеристики колебательного звена:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
Временные характеристики звена определяются выражениями:
() ()
ttteKth
t
1sincos1 ⋅
λ
λ
γ
+λ−=
γ−
; (2.52)
() ()
tte
q
KtW
t
1sin
1
2
⋅λ
λ
=
γ−
; (2.53)
;lnγ,
1
,lnγ
2
1
1
2
1
B
B
T
q
A
A
q
π
λ
==
π
λ
=ζ=
,
γ
γ
,γ,1
22
1
22
1
2
λ+
=ζλ+=ζ−=λ
qq
λ
π
λ
π
2
B
1
B
W
t
0
е)
q=
ω
a) б) в)
ϕ
jQ
∞→
ω
0
K
0
M
0
180°
0=ω
ω
ω
2
м
21 ζ−=ω q
2
212 ζ−ζ
K
P
K
–180°
–180°
L
ω
ϕ
0
40
г)
0
Klg20
q
λ
π
λ
π
2
A
1
A
K
h
0
t
a
L
ω
д)
–90
°
где
ii
BA ,
– амплитуды колебаний, показанные на рис. 2.7, д, е;
γ
– коэффициент затухания переходного процесса;
λ
–
частота затухающих колебаний.
При значениях
1>
ζ
колебательное звено превращается в апериодическое звено второго порядка. К колебательным
звеньям относятся RLC-цепи, колебательные контуры, гироскопические элементы, упругие механические передачи. Сле-
дует заметить, что рассмотренные звенья обладают самовыравниванием и считаются устойчивыми. Свойство самовырав-
нивания проявляется в том, что при ступенчатом изменении входной величины они самопроизвольно приходят в новое
установившееся состояние с
(
)
const=ty ∞→
.
2.2.5. Консервативное звено
Данное звено представляет собой частный случай колебательного звена при относительном коэффициенте затухания
ζ
, равном нулю. Это имеет место, например, если в колебательной RLC-цепи положить
0=R
. Графическое представле-
ние частотных и временных характеристик показано на рис. 2.8.
ДХ консервативного звена легко получить из характеристик колебательного, если положить
0=
ζ
. В этом случае
ДХ записываются в виде
(
)()
tKxtyyT =+
&&
2
; (2.54)
()
T
q
q
p
K
pT
K
pW
1
,
1
1
2
222
=
+
=
+
=
; (2.55)
()
2
222
1
1
q
K
T
K
jW
ω
−
=
ω−
=ω
; (2.56)
() () ()
;
1
,0,
1
22
2
2
T
K
MQ
q
K
P
ω−
=ω=ω
ω
−
=ω
(2.57)
Рис. 2.8. Частотные и временные характеристики консервативного звена:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
()
<ω
>ω−
=ωϕ
;0при180
;0при 180
0
0
(2.58)
(
)
22
1lg20lg20 TKL ω−−=ω ; (2.59)
()
>ωω−
<ω
=ω
;
1
приlg20
;
1
приlg20
22
T
T
T
K
L
a
(2.60)
(
)
(
)()
tqtKth 1cos1 ⋅
−
=
; (2.61)
K
q→ω
P
∞→ω
0
jQ
q
−
q
ω
M
ϕ
0
ω
б)
0
0=ω
K
в) а)
Klg20
0
ϕ
40
ω
a
L
q
q
π
q
π
t
K
h
λ
π
λ
π
0
W
0
L
ω
t
г) д) е)
180
°
–180
°
–180°
–90°
0°
(
)()
ttqKqtW 1sin ⋅
=
. (2.62)
2.2.6. Интегрирующие звенья
Выделяют три вида интегрирующих звеньев: идеальное, инерционное интегрирующее (с замедлением) и изодром-
ное. ДХ этих звеньев приведены в табл. 2.6 и на рис. 2.9 – 2.11.
2.6. Динамические характеристики интегрирующих звеньев
Наимено-
вание
характе-
ристик
Идеальное
Инерционное
(с замедлением)
Изодромное
Дифференциальное
уравнение
()
txKy =
&
∫
=
=
t
dssxK
ty
0
)(
)(
(
)
xKtyyT
=
+
&&
()
xKtxKy
&&
1
+
=
Переда-
точная
функция
()
p
K
pW =
()
()
Tp
KT
p
K
Tpp
K
pW
+
−=
=
+
=
1
1
()
(
)
KKTK
p
K
p
TK
pW
p
11
,
1
=+=
=
+
=
АФЧХ
()
ω
=ω
j
K
jW
()
()
Tjj
K
jW
ω+ω
=ω
1
()
1
K
j
K
jW +
ω
=ω
АЧХ
()
ω
=ω
K
M
()
22
1 ω+ω
=ω
T
K
M
()
22
1 ω+
ω
=ω T
K
M
ФЧХ
()
2
π
−=ωϕ
Для
0>ω
()
Tω−
π
−=ωϕ arctg
2
()
Tω+
π
−=ωϕ arctg
2
ЛАЧХ
()
()
ω=
=
ω
/lg20 K
L
(
)
22
1
lg20
T
K
L
ω+ω
=
=
ω
()
ω
ω+
=
=ω
22
1
lg20
TK
L
Переходная функ-
ция
() ()
ttKth 1⋅=
(
)
()
⋅
−−=
=
−
teTtK
th
T
t
11
() ( )
(
)
tKKtth 1
1
+=
;
KTK
=
1
Функция веса
() ()
tKtW 1⋅
=
() ()
teKtW
T
t
11 ⋅
−=
−
() ()
(
)
tKtKtW
δ
+
⋅=
1
1
;
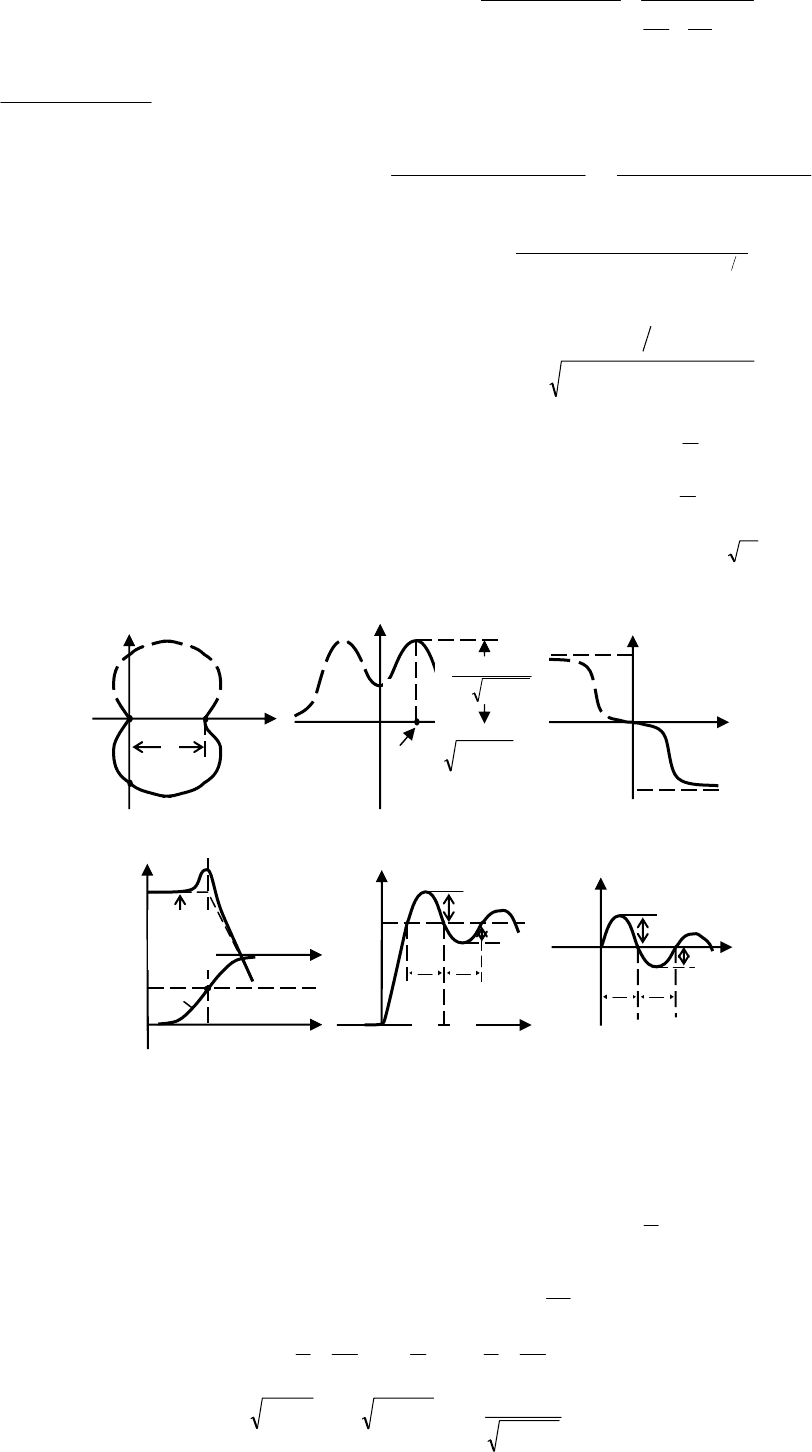
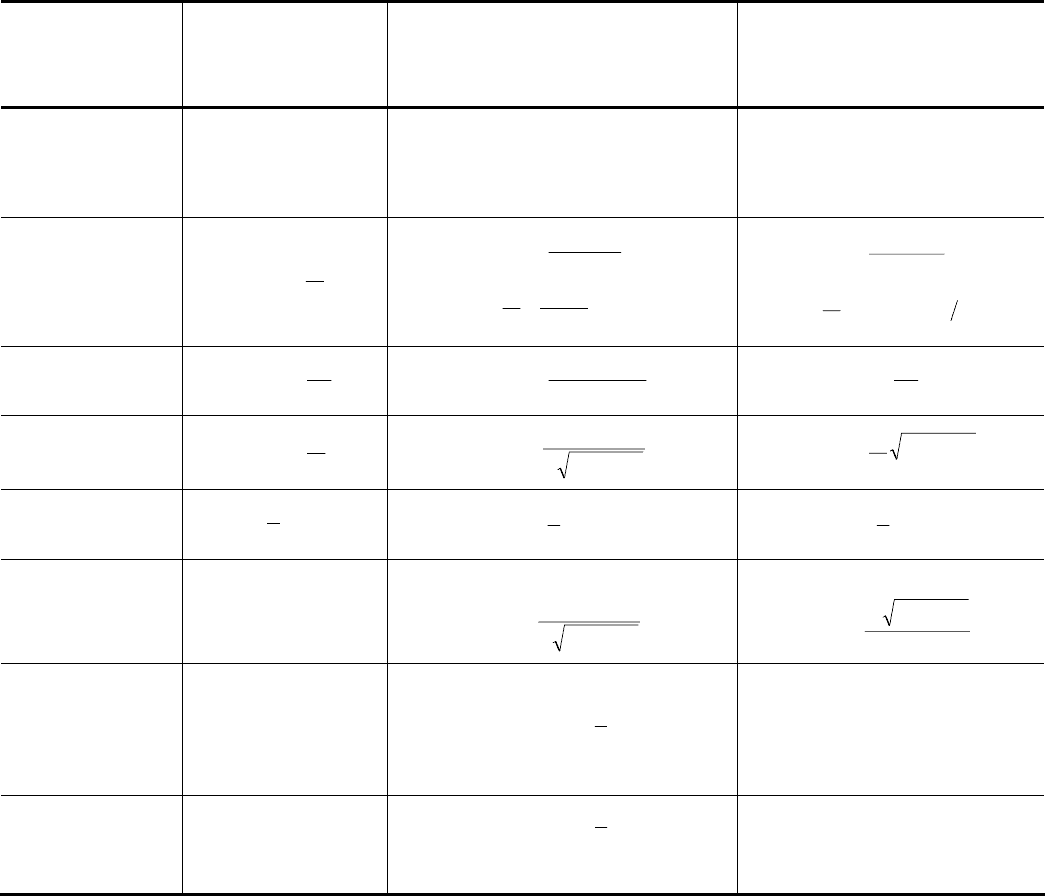
Рис. 2.9. Частотные и временные характеристики идеального
интегрирующего звена:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
Рис. 2.10. Частотные и временные характеристики инерционного
интегрирующего звена:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
Рис. 2.11. Частотные и временные характеристики изодромного
интегрирующего звена:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
ϕ
0
P
0
M
0
ω
L
0
ω
ϕ
20
0
h
W
t
K
а
)
ω
∞→
ω
0→
ω
t
jQ
0
ω = K
б) в)
г) д) е)
ω
–90°
–180°
–90°
–90°
90°
jQ
0
P
KT
∞=ω
0<ω
0
M
ω
ω
а)
T1
0
L
ω
ϕ
20
40
0
h
t
T
W
T
K
a
L
ϕ
б) в)
г)
ω
t
0
д) е)
–180
°
–90°
–180°
–90°
180°
90°
0
0→ω
∞=ω
jQ
P
1
K
0<ω
0
ω
1
K
ϕ
а)
T1
0
L
ϕ
Klg20
20
a
L
K
h
t
K
1
W
K
ω
ω
М
ω
t
б) в)
г)
д) е)
–180
°
–90°
–90°
90°
Примером идеального интегрирующего звена могут рассматриваться операционный усилитель (в режиме интегри-
рования), интегрирующий привод в навигационных системах, гироскоп, малоинерционный электродвигатель и др.
Инерционное интегрирующее звено или интегрирующее звено с замедлением можно рассматривать как последова-
тельное соединение идеального интегрирующего и апериодического (первого порядка) звеньев. Такое звено также назы-
вают реальным двойным интегратором, система дифференциальных уравнений в нормальной форме для него записыва-
ется в виде
;)(
21
tzz
=
&
,)()(
22
tbxtazz
+
=
&
(2.63)
где
T
K
b
T
ayzyz =−=== ;
1
;;
21
&
.
Реальный двойной интегратор используется для описания динамики таких объектов как серводвигатели, демпферы,
интегрирующие приводы и др. Наряду с реальным двойным интегратором. Ряд объектов описываются моделью двойного
интегратора, т.е.
(
)
;
1
tz=z
&
()
tbx=z
2
&
. (2.64)
К таким объектам относятся некоторые двигатели постоянного тока, гидравлические емкости, движение летатель-
ных аппаратов и т.д.
Как видно из передаточной функции изодромного звена, его можно представить в виде двух параллельно соединен-
ных звеньев – идеального интегрирующего и безынерционного (усилительного). Изодромное звено широко используется
для описания динамических режимов некоторых объектов (демпфер с пружиной, операционный усилитель с обратной
связью в виде RC-цепи и др.) и устройств системы автоматического регулирования (изодромный или пропорционально-
интегральный регулятор). Особенностью данного звена (график ЛАЧХ рис. 2.11,
г) является то, что в области малых час-
тот
ω
T
<
1
звено ведет себя как идеальное интегрирующее, а при больших
ω
T
>
1
– как безынерционное.
Общей особенностью интегрирующих звеньев является то, что они не обладают свойством самовыравнивания, т.е.
ограниченное изменение входной величины
х, например, ступенчатое, приводит к неограниченному возрастанию во вре-
мени выходной величины
у. Это наглядно проявляется в графиках переходной функции (рис. 2.11, д; 2.12, д; 2.13, д).
2.2.7. Дифференцирующие звенья
Динамические характеристики трех дифференцирующих звеньев – идеального, с замедлением и форсирующего при-
ведены в табл. 2.7 и на рис. 2.12 – 2.14.
Примерами идеального дифференцирующего звена являются операционный усилитель в режиме дифференцирова-
ния. Дифференцирующее звено с замедлением можно представить в виде последовательного соединения идеального
дифференцирующего и апериодического звеньев. Примерами такого звена служат фрагменты электрических цепей (CR-,
RL-).
Форсирующее звено представляет собой параллельное соединение безынерционного и идеального дифференци-
рующих звеньев. Данное звено широко используется в составе корректирующих цепей систем автоматического управле-
ния.
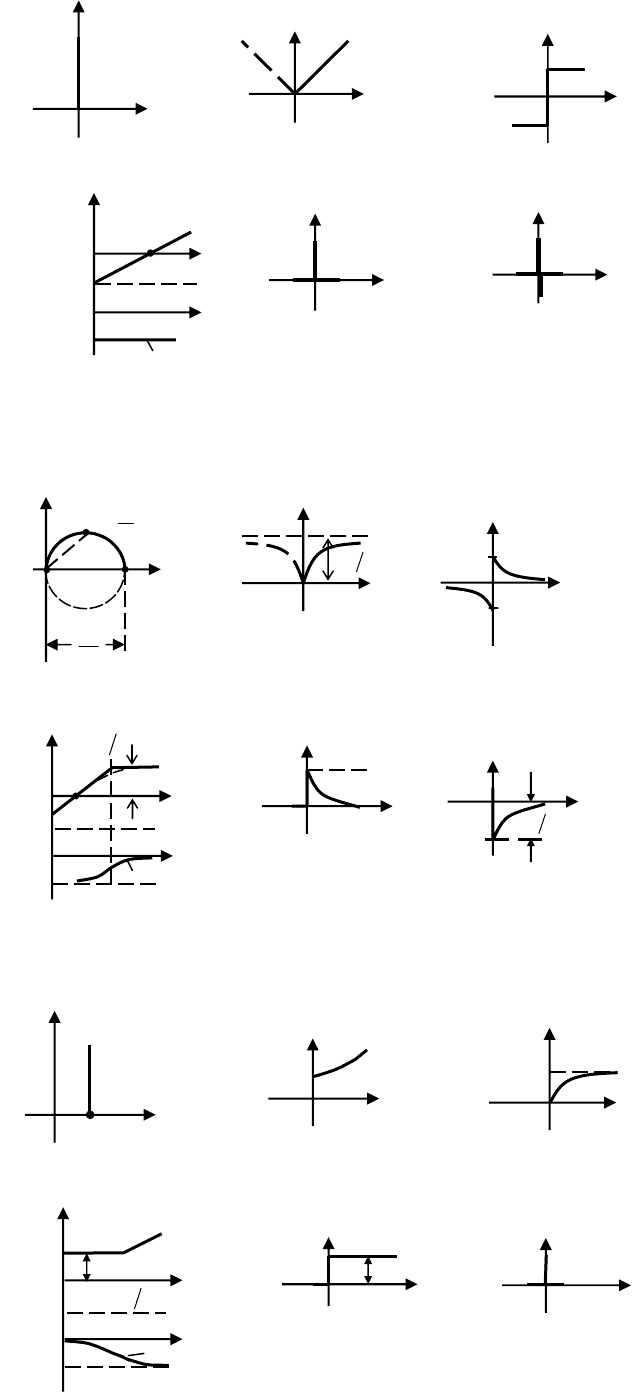
Рис. 2.12. Частотные и временные характеристики идеального
дифференцирующего звена:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
Рис. 2.13. Частотные и временные характеристики с замедлением
дифференцирующего звена:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
Рис. 2.14. Частотные и временные характеристики дифференцирующего звена первого порядка (форсирующего):
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
jQ
0
L
ω
ω
ϕ
20
K/1
0
h
0
W
t
t
г)
д) е)
0
M
ω
а)
0
0=ω
∞→ω
P
0
ϕ
ω
б) в)
–180°
–90°
–90°
90°
90°
T
K
0
∞=ω
0<ω
P
T
1
=ω
0=ω
jQ
0
ϕ
T1
0
L
ω
ω
ϕ
Klg20
20
a
L
K/1
0
h
t
TK /
а)
б) в)
0
M
ω
TK
ω
г)
е) д)
0
t
TK
W
–180°
–90°
90°
90°
–
90°
0
0=ω
∞→ω
jQ
P
1
K
0
M
ω
1
K
0
ϕ
а)
ω
0
L
ω
ω
ϕ
Klg20
0
20
0
T
1
0
h
1
K
0
t
W
a
L
б) в)
е) д)
г)
t
90°
90°
–90°
2.7. Динамические характеристики дифференцирующих звеньев
Наимено-
вание характеристик
Идеальное С замедлением Первого порядка (форсирующее)
Дифференциальное
уравнение
(
)
xKty
&
=
(
)
xKtyyT
&&
=
+
()
(
)()
txxTKty
+
=
&
1
Переда-
точная
функция
(
)
KppW =
()
Tp
Kp
pW
+
=
1
() ( )
;
1
21
1
pKK
TpKpW
+=
=+=
12
/ KKT
=
АФЧХ
(
)
ω=ω KjjW
()
Tj
Kj
jW
ω+
ω
=ω
1
()
TKjK
jKK
jW
11
21
ω+=
=ω+=
=
ω
Окончание табл. 2.7
Наимено-
вание характеристик
Идеальное С замедлением Первого порядка (форсирующее)
АЧХ
(
)
ω=ω KM
()
22
1 T
K
M
ω+
ω
=ω
()
22
1
1 TK
M
ω+=
=ω
ФЧХ
()
2
π
=ωϕ
()
ω
=ωϕ
T
1
arctg
()
T
ω
=ω
ϕ
arctg
ЛАЧХ
() ( )
ω
=
ω KL lg20
()
22
1
lg20
T
K
L
ω+
ω
=ω
()
()
2
1
22
1
1lg20
lg20
T
KL
ω++
+=ω
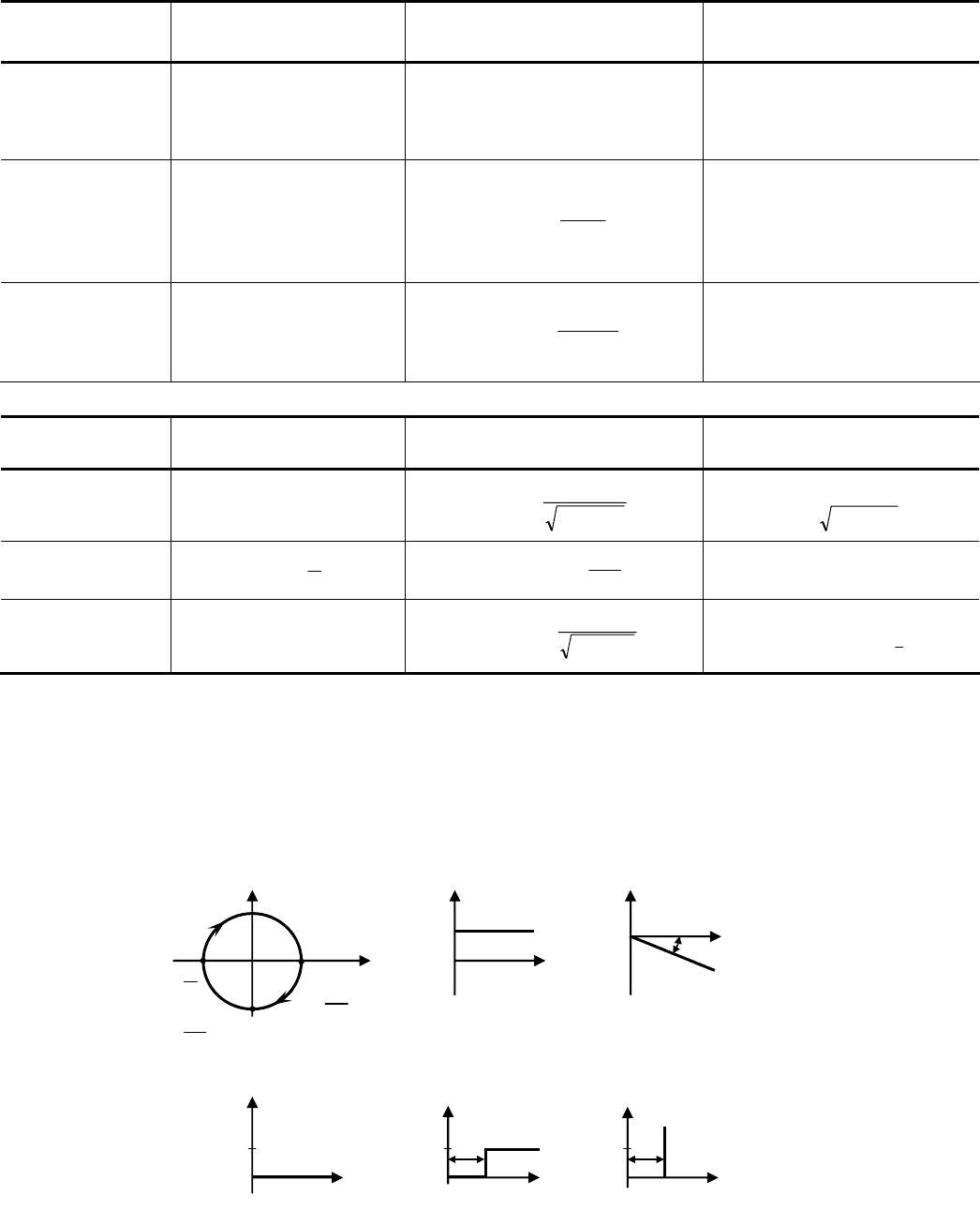
2.2.8. Звено чистого запаздывания
Звено чистого (постоянного) запаздывания без искажения формы входного сигнала сдвигает его во времени, т.е.
(
)
(
)
τ
−
tx=ty , (2.65)
где τ – время запаздывания.
Рис. 2.15. Динамические характеристики звена чистого запаздывания:
а – АФЧХ; б – АЧХ; в – ФЧХ; г – ЛАЧХ; д – переходная функция; е – функция веса
jQ
0=ω
P
τ
π
=ω
2
–1
τ
π
=ω
τ
π
=ω
3
1
0
ϕ
ω
0
α
τ
=
α
tg
а)
1
ω
0
L
()
0=ωL
1
t
0
h
τ
(
)
(
)
τ
−
=
tth 1
1
0
W
τ
(
)
(
)
τ
−
δ
=
ttW
()
ωτ−ωτ==ω
ωτ−
sincos jejW
j
(
)
1
=
ω
M
(
)
ω
τ
−
=
ω
ϕ
1
ω
0
M
б) в)
е)д)г)
t