Митрофанов А.М., Станякин В.М. (сост.) Теория и расчёт измерительных преобразователей и приборов
Подождите немного. Документ загружается.

11
Различают полные и частные динамические характеристики (ДХ)
средств измерений. Полные ДХ отражают связь информативного параметра
выходного сигнала устройства с изменяющейся измеряемой величиной,
частные ДХ - изменение выходного сигнала в зависимости от изменения
влияющей величины или неинформативного параметра входного сигнала.
Для аналоговых линейных устройств с сосредоточенными параметрами
полными ДХ являются:
- дифференциальное уравнение (структура и коэффициенты);
- передаточная функция W(p) ;
- импульсная характеристика g(t) ;
- переходная характеристика h(t) ;
- комплексная частотная характеристика S(jω), в которой выделяют
действительную и мнимую части: амплитудно-частотную характеристику
(АЧХ) S(ω) и фазочастотную характеристику (ФЧХ) ϕ(ω) .
Любая полная ДХ однозначно определяет работу устройства. Зная любую
из полных ДХ, можно определить все остальные полные ДХ. Полные ДХ
типовых преобразователей приведены в [9], с.183.
Примерами частных ДХ являются:
- время установления показаний;
- выброс переходной характеристики при колебательном переходном процессе;
- ширина диапазона рабочих частот при заданной неравномерности АЧХ или
нелинейности ФЧХ.
3.2 Выбор варианта задания
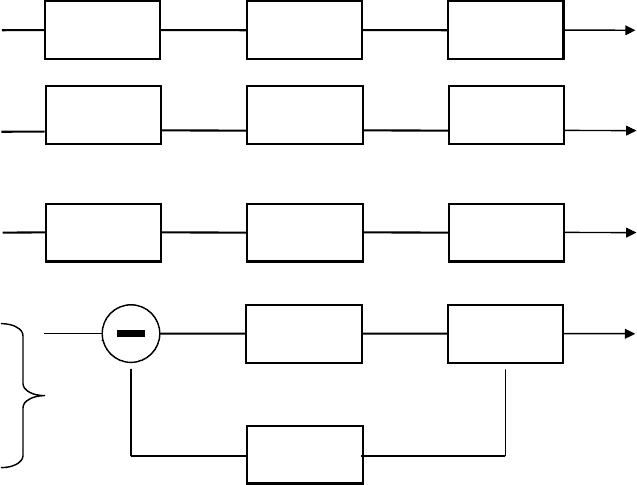
Предлагаемые студентам варианты структурных схем СИ, включающие
по три типовых преобразователя, приведены на рис.1.
1 2 3
Вариант 1: АП УП АП
1 2 3
Вариант 2: АП УП КП
1 2 3
Вариант 3: ДП АП АП
1 2
Вариант 4: АП УП
3
Вариант 5: АП
Рис. 1
12
В вариантах 1-3 использовано последовательное соединение типовых
преобразователей, в вариантах 4,5 – соединение типовых преобразователей с
отрицательной обратной связью (знак минус в кружке сумматора).
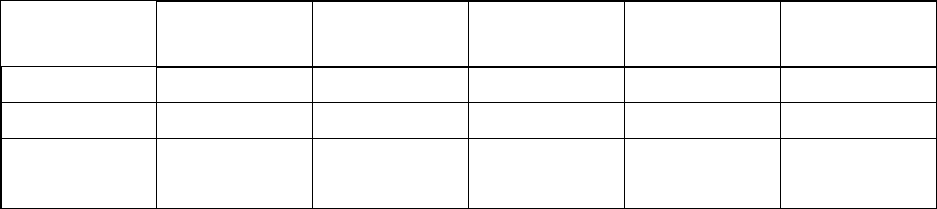
В табл.1 приведены исходные параметры типовых преобразователей,
которые в процессе проектирования будут варьироваться. Для АП и ДП
задается постоянная времени τ , для УП - коэффициент передачи k , для КП -
постоянная времени τ = 2π / ω , где ω - собственная частота КП, и коэффициент
затухания γ.
Таблица 1
№ преобра-
зователя
Вариант 1 Вариант 2 Вариант 3 Вариант 4 Вариант 5
1
τ = 1 с τ = 1 с τ = 0,2 с τ = 5 с τ = 5 с
2 k = 5 k = 5
τ = 10 с
k = 10 k = 40
3
τ = 0,2 с
τ = 10 с
γ = 0,5
τ = 0,2 с τ = 0,1 с τ = 0,1 с
Предложенные варианты структурных схем соответствуют реальным СИ,
например: измерителю медленно меняющихся физических величин
(температуры или влажности воздуха и т.п.) - варианты 1,2; измерителю
пройденного пути с первичным измерительным преобразователем в виде
датчика ускорения - вариант 3; измерителю скачкообразно меняющихся
физических величин (ударных механических нагрузок) - варианты 4,5.
Выбор варианта производится по формуле:
N = целая часть числа (0,5m +1),
где m - последняя цифра шифра студента. Например, при m = 7 следует
выполнять вариант 4.
В процессе проектирования студенты должны таким образом изменить
первоначальные параметры типовых преобразователей, чтобы обеспечить
заданные динамические характеристики проектируемого СИ в целом.
3.3. Содержание и порядок выполнения работы
Курсовая работа состоит из введения, теоретической и практической
частей.
Во введении необходимо дать определение ДХ СИ и перечислить полные
ДХ. В качестве примера привести полные ДХ типовых преобразователей,
использованных в выбранном варианте.
В теоретической части студент рассчитывает полные ДХ СИ в целом в
следующей последовательности:
- передаточная функция W(p);
- переходная характеристика h(t);
- АЧХ S(ω) и ФЧХ ϕ(ω).
По полученным аналитическим выражениям h(t), S(ω) и ϕ(ω) необходимо
произвести расчет значений этих функций в 3-4 точках и построить их графики.
13
Практическая часть курсовой работы (автоматизированное
проектирование) выполняется в компьютерном классе. При этом используется
стандартная САПР «MICROCAP-2», предназначенная для автоматизированного
проектирования электрических схем методом многовариантного анализа.
Поэтому отдельные типовые преобразователи заданной структурной схемы СИ
должны быть предварительно представлены в виде своих электрических
аналогов. Электрические аналоги элементов структурных схем приведены в
приложении 1.
Соединив электрические аналоги типовых преобразователей в
соответствии со структурной схемой СИ, получим электрический аналог СИ в
целом, который анализируется с помощью САПР «MICROCAP-2».
Работа в САПР «MICROCAP-2» проводится с помощью описания этой
системы, приведенного в приложении 2. Студенты должны выполнить
следующие операции:
- создать файл исследуемой схемы - нарисовать средствами САПР
изображение электрической схемы на экране дисплея, распечатать
изображение схемы;
- провести средствами САПР анализ переходной характеристики. Для этого
ко входу схемы подключается батарея постоянного напряжения величиной
1 В - аналог единичного ступенчатого воздействия;
- провести средствами САПР анализ АЧХ и ФЧХ;
- распечатать результаты анализа переходной характеристики, АЧХ и ФЧХ,
сравнить их с теоретически рассчитанными;
- получить у преподавателя задание на синтез СИ с заданным значением
какой-либо частной ДХ. Методом многовариантного анализа, изменяя
параметры элементов схемы, добиться требуемой частной ДХ.
3.4. Пример теоретического расчета полных ДХ
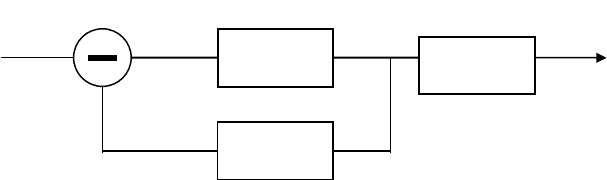
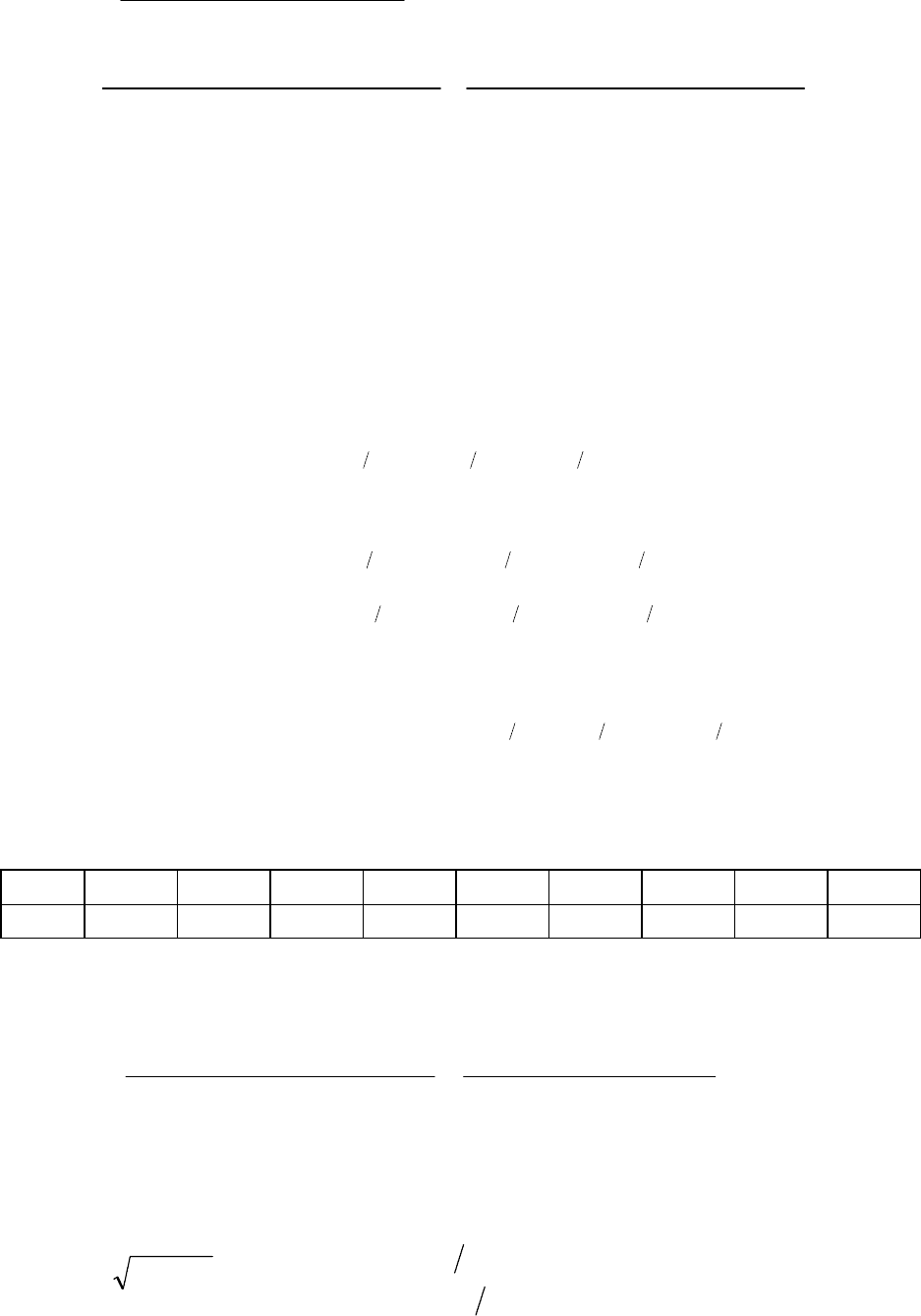
Рассмотрим подробно пример расчета полных ДХ для СИ, структурная
схема которого изображена на рис. 2.
Исходные параметры элементов: τ
1
= 0,5 с; τ
2
= 0,5 с; τ
3
= 1 с.
ДП
АП
3
1
2
Рис. 2
АП
Работа над теоретической частью курсового проекта начинается с
определения передаточной функции W(p) рассматриваемого СИ в целом. При
последовательном соединении n отдельных типовых преобразователей
пользуемся формулой
W(p) = W
1
(p) W
2
(p) . . . W
n
(p),

14
а при наличии соединения с обратной связью
()
(
)
() ()
pWpW
pW
pW
ОСПВ
ПВ
1+
=
,
где W
ПВ
(p) - функция передачи прямой ветви, W
ОС
(p) - функция передачи ветви
обратной связи. В рассматриваемом примере получим
()
(
)
(
)
() ()
pWpW
pWpW
pW
31
21
1+
=
.
(1)
Подставляя в формулу (1) выражения для функций передачи W
1,2,3
(p)
типовых преобразователей (в данном случае - ДП и двух АП), после
преобразований получим
()
(
)
() (
)
331
2
31
31
1]21[
1
τττττ
τ
τ
ppp
pp
pW
++++
+
=
.
(2)
Подставив исходные данные (постоянные времени типовых
преобразователей) в формулу (2), получим окончательное выражение для
передаточной функции рассматриваемого СИ в целом
()
(
)
()
()
ppp
pp
pW
5,015,021
15,0
2
+++
+
=
.
(3)
Расчет переходной характеристики h(t) студент может провести любым из
трех следующих способов:
1. Сначала найти импульсную характеристику g(t) как обратное
преобразование Лапласа (L
−1
) от передаточной функции
()
(
)
{
}
pWLtg
1−
=
,
при этом можно воспользоваться таблицами в [7], с. 242, а затем вычислить
интеграл
() ()
∫
=
t
dttgth
0
.
2. Применить метод неопределенных коэффициентов (см. [9], с. 190);
3. Воспользоваться готовыми выражениями для h(t), приведенными в [8],
с. 48 и в приложении 3, для некоторых стандартных видов функций W(p). При
необходимости с помощью алгебраических преобразований предварительно
привести функцию W(p) к стандартному виду.
В качестве примера рассмотрим подробно использование второго и
третьего способов.
Метод неопределенных коэффициентов следует использовать в случае,
когда степень числителя в (2) меньше степени знаменателя. Идея метода
заключается в представлении исходной функции W(p) в виде суммы простых
алгебраических дробей типа
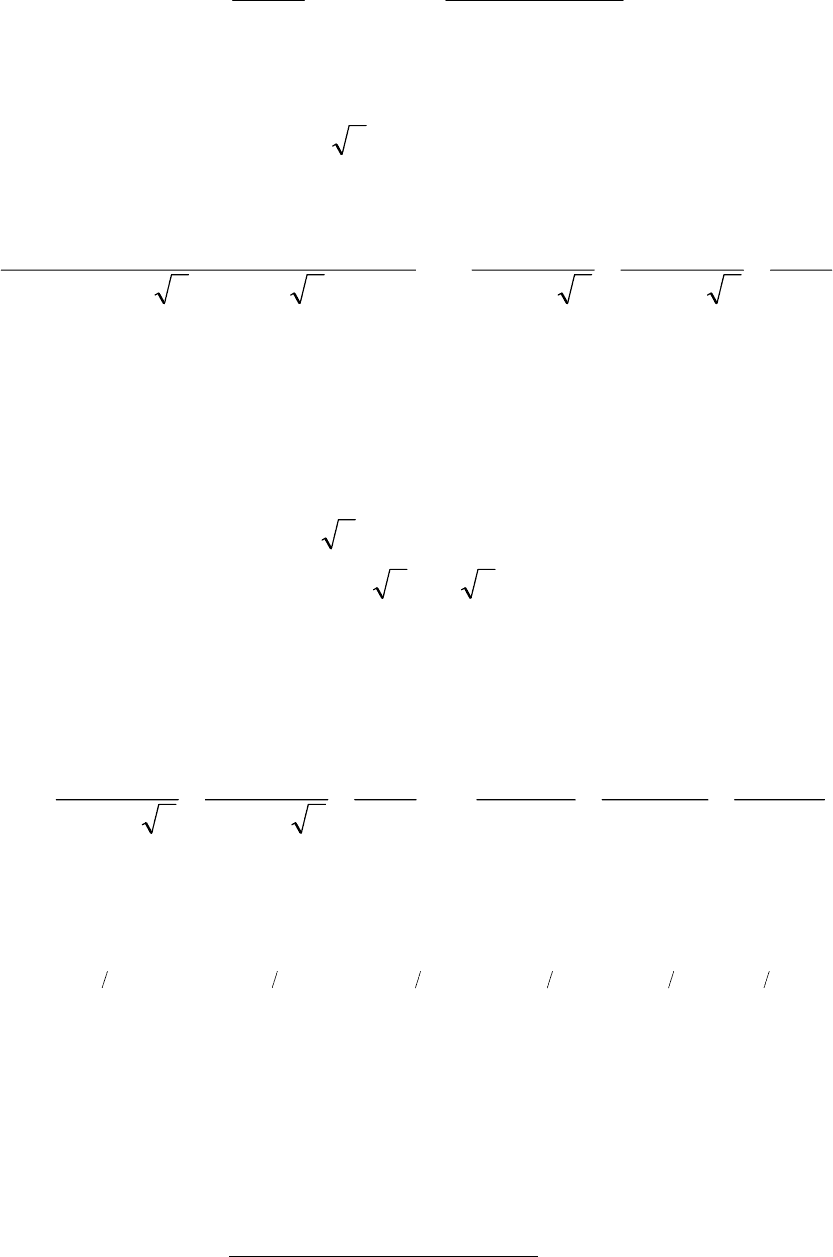
15
()
τ1
1
1
p
pw
+
=
и
()
22
2
ττγ21
1
pp
pw
++
=
,
для каждой из которых отклики h(t) известны.
В нашем случае знаменатель передаточной функции в (3) имеет три
действительных корня: α
1,2
= − 2 ±
2
, α
3
= − 2 и, следовательно, передаточная
функция может быть представлена в виде суммы трех дробей типа w
1
(p), взятых
с неопределенными пока коэффициентами A
0
, A
1
и A
2
()
()
()()
()
.
2
2222
2
2222225,0
15,0
21
0
⎥
⎦
⎤
⎢
⎣
⎡
+
+
++
+
−+
=
+++−+
+
=
p
A
p
A
p
A
ppp
pp
pW
Рассматривая это выражение как уравнение относительно
неопределенных коэффициентов, приведем его правую часть к общему
знаменателю и приравняем коэффициенты при одинаковых степенях р.
Получим систему трех линейных уравнений с тремя неизвестными A
0
, A
1
и A
2
()()
()
()
⎪
⎩
⎪
⎨
⎧
=−−+++
=−+++
=++
,12224
124
1
210210
10210
210
AAAAAA
AAAAA
AAA
из которой, например, методом подстановки, найдем A
0
= −0,06; A
1
=2,06; A
2
= −1.
Таким образом, передаточная функция W(p) может быть представлена в
виде суммы элементарных алгебраических дробей, представляющих собой
передаточные функции трех апериодических звеньев, а именно
()
.
5,01
1
29,01
2,1
71,11
2,0
2
1
22
06,2
22
06,0
2
pppp
pp
pW
+
−
+
+
+
−≈
⎥
⎦
⎤
⎢
⎣
⎡
+
−
+
++
+
−+
−
=
Соответственно и переходная характеристика рассматриваемого СИ
представляет собой сумму переходных характеристик трех апериодических
звеньев
()
(
)
(
)
(
)
.2,12,0112,112,0
5,029,071,15,029,071,1 tttttt
eeeeeeth
−−−−−−
+−=−−−+−−=
(4)
Рассмотрим другой способ определения переходной характеристики h(t).
Передаточная функция W(p) не является одной из стандартных функций, для
которых имеются готовые выражения h(t) (полный набор стандартных функций
приведен в [4] и приложении 3). Однако с помощью простых алгебраических
преобразований она может быть представлена в виде суммы двух стандартных
функций вида
()
()()(
)
,
111
1
321
2
5
2
4
pTpTpT
TppT
pW
+++
++
=
(5)
где
T
1
> T
2
> 0 , T
2
> T
3
≥ 0 , T
4
, T
5
≥ 0 .
16
Действительно, преобразуя выражение (3), получим
()
()
()
()
()( )()()( )()
.
5,0129,0171,11
1
5,0129,0171,11
1
5,0
5,015,021
15,0
2
2
⎥
⎦
⎤
⎢
⎣
⎡
+++
−
+++
++
=
=
+++
+
=
pppppp
pp
ppp
pp
pW
(6)
Таким образом, функция W(p) представлена в виде алгебраической суммы
W(p) = W
′
(p) – W
′′
(p) двух функций стандартного вида (5).
Для функции W
′
(p) параметры равны: T
1
= 1,71 с, T
2
= 0,5 с, T
3
= 0,29 с,
T
4
=
T
5
= 1 c.
Для функции W
′′
(p) параметры равны: T
1
= 1,71 с, T
2
= 0,5 с, T
3
= 0,29 с,
T
4
=
T
5
= 0 .
Далее, по формулам, приведенным в [4] и приложении 3, вычисляем
вспомогательные коэффициенты D
0
, E
0
, F
0
для обеих функций и подставляем
их в выражение для переходной характеристики функции типа (5)
(
)
.1
3
21
000
Tt
TtTt
eFeEeDth
−
−−
−−−=
Получим две вспомогательные переходные характеристики
(
)
,67,297,23,11
29,05,071,1 ttt
eeeth
−−−
−+−=
′
()
,27,097,07,11
29,05,071,1 ttt
eeeth
−−−
−+−=
′′
и, далее, окончательное выражение для переходной характеристики СИ,
которое полностью совпадает с (4)
() ()
(
)()
.2,12,05,0
29,05,071,1 ttt
eeeththth
−−−
−+=
′′
−
′
=
Для построения графика переходной характеристики h(t) рассчитаем ее
значения при t = 0, t → ∞ и еще в нескольких произвольных точках (табл. 2).
Таблица 2
t, c 0 0,1 0,2 0,3 0,4 0,5 1,0 2,0
→ ∞
h(t)
0 0,16 0,25 0,29 0,30 0,30 0,21 0,08 0
Для определения частотной характеристики рассматриваемого СИ
достаточно в формуле (6) сделать замену p→j ω
()
()
()
()
(
)
()
()
.
ω2ωω42
ω1ω2
ω5,01ω5,0ω21
ω1ω5,0
ω
22
jj
jj
jj
jj
jS
+−+
+
=
+−+
+
=
(7)
Для расчета АЧХ необходимо вычислить модуль комплексной функции
(7), а для расчета ФЧХ – аргумент (фазу) этой функции. При расчете
используются следующие правила действий с комплексными числами:
-
(
)
()
⎩
⎨
⎧
<−
>
=+=
0,arctan
0,arctan
arg;mod
22
aab
aab
zbaz
π
, где z = a + jb
;
17
- модуль произведения (частного) двух комплексных чисел равен
произведению (частному) модулей этих чисел;
- аргумент произведения (частного) двух комплексных чисел равен сумме
(разности) аргументов этих чисел.
В нашем примере, пользуясь перечисленными правилами, получим
следующие выражения:
()
()()
.
4ω412ωω
1ωω2
ω
224
2
+++
+
=S
(8)
() ()
(
)
(
)
(
)
(
)
(
.2ωarctan22ωarctan22ωarctanω1arctanωφ −+−−−−=
π
)
(9)
Для построения графиков АЧХ и ФЧХ следует рассчитать значения
функций (8) и (9) при ω = 0, ω → ∞, а также еще в нескольких произвольных
точках (табл. 3).
Таблица 3
ω , рад / c
0 0,5 1,0 2,0 4,0
→ ∞
S(ω)
0 0,20 0,30 0,38 0,35 0
ϕ(ω), град
90 56 37 8
− 36 − 90
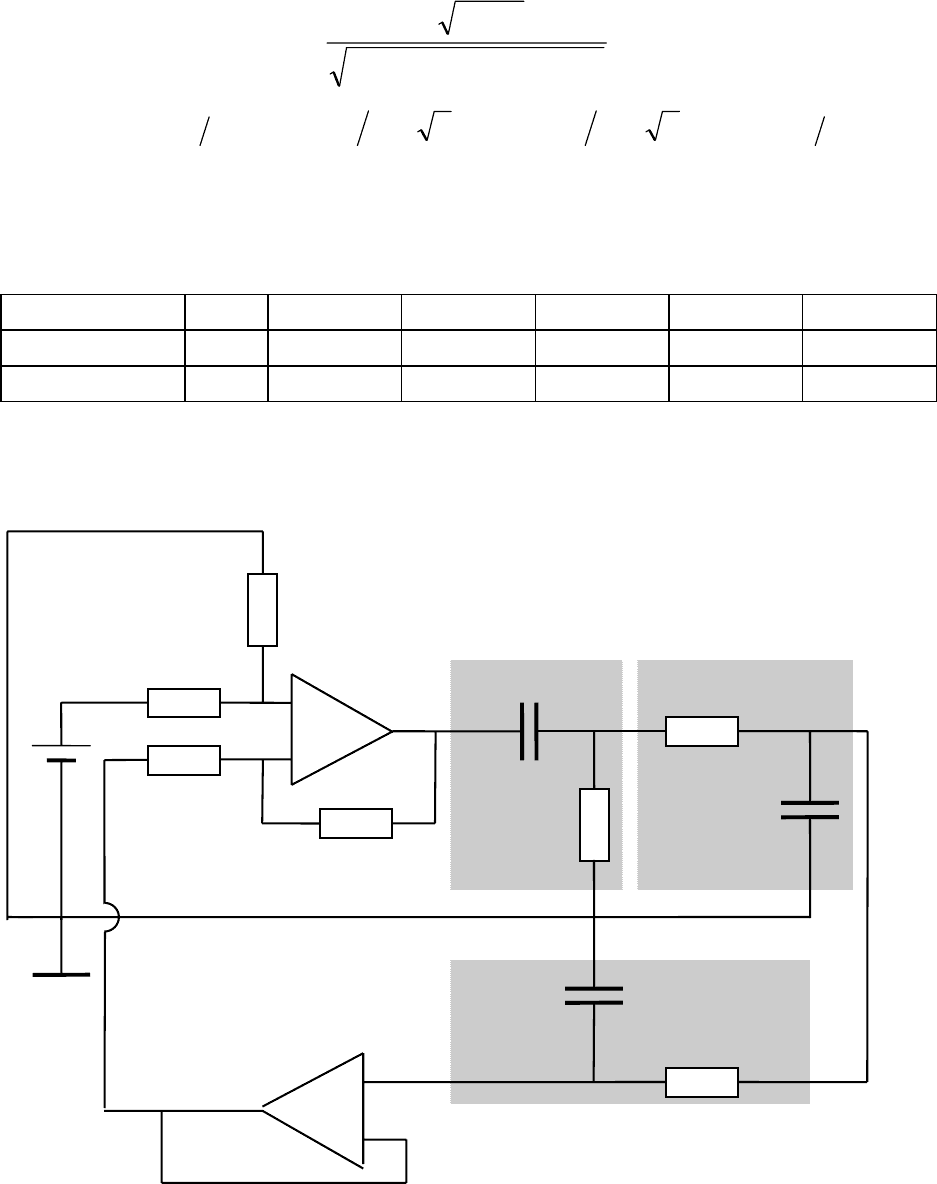
Составим электрический аналог (рис. 3) структурной схемы
рассматриваемого СИ, используя электрические аналоги отдельных типовых
преобразователей (см. приложение 1).
10 кОм
10 кОм
100 мкФ 1 50 кОм 2
1 В +
+ _
10 кОм 5 кОм 10 мкФ
10 кОм
2 мкФ 3
500 кОм
+
_
Рис. 3
18
На схеме фоном отмечены электрические аналоги отдельных типовых
преобразователей:
ДП (1), АП (2) и АП (3) в цепи обратной связи. Параметры
(постоянные времени) типовых преобразователей установлены в соответствии с
заданием за счет выбора номиналов резисторов R и конденсаторов C (τ = RC).
Разностный элемент реализован на операционном усилителе и четырех
резисторах сопротивлением по 10 кОм. Батарея постоянного напряжения
величиной 1 В моделирует единичное ступенчатое воздействие, подаваемое на
вход устройства.
Для обеспечения точности (адекватности) электрической модели
исследуемой структурной схемы СИ полезно ввести в модель буферные
элементы между отдельными типовыми преобразователями. На рис. 3 такой
буферный элемент на операционном усилителе введен в цепь обратной связи. В
схеме использован другой возможный способ уменьшения влияния
последующего типового преобразователя на параметры предыдущего (второго
на первый, третьего на второй) – номиналы резисторов последовательно
увеличиваются на порядок при переходе от первого ко второму и, далее, к
третьему типовому преобразователю.
Работа над практической частью курсовой работы проходит в
компьютерном классе на базе САПР «MICROCAP-2».
Электрическая схема СИ создается средствами САПР «MICROCAP-2» на
экране дисплея с помощью описания, приведенного в приложении 2,
(изображения резисторов и индуктивностей в английском стандарте
отличаются от российского стандарта). Далее проводится анализ переходной
характеристики, АЧХ и ФЧХ электрической схемы для исходных (заданных)
значений параметров типовых преобразователей.
В качестве примера задания на автоматизированное проектирование СИ с
требуемой частной динамической характеристикой потребуем выполнения
следующих условий:
- h(t) < 0,25, т.е. устройство не должно выходить из равновесия более, чем на
25 % от амплитуды входного ступенчатого воздействия;
- параметр первого типового преобразователя τ
1
= 0,5 с должен остаться
неизменным.
Для выполнения указанного требования воспользуемся методом
многовариантного анализа. Будем изменять параметры типовых
преобразователей 2 и 3 и, с помощью САПР, получать результат в виде
переходной характеристики, которую будем визуально оценивать на предмет
выполнения условия h(t) < 0,25. Таким образом будет реализован диалоговый
(интерактивный) режим автоматизированного проектирования, в котором
проектировщик выступает в качестве интерпретатора результатов
проектирования и выбирает направление дальнейшего проектирования (в
данном случае направление изменения параметров).
В нашем примере условие h(t) < 0,25 будет выполнено при следующих
параметрах типовых преобразователей: τ
2
= 1 с, τ
3
= 0,2 с.
19
4. ПРИЛОЖЕНИЯ
Приложение 1
ЭЛЕКТРИЧЕСКИЕ АНАЛОГИ ТИПОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Электрические аналоги типовых преобразователей и других элементов
(табл.) заданных структурных схем включают следующие компоненты
(использованы буквенные обозначения, принятые САПР «MICROCAP-2»):
- резистор (R);
- конденсатор (С);
- индуктивность (L);
- операционный усилитель (ОРА);
- батарея (ВАТ).
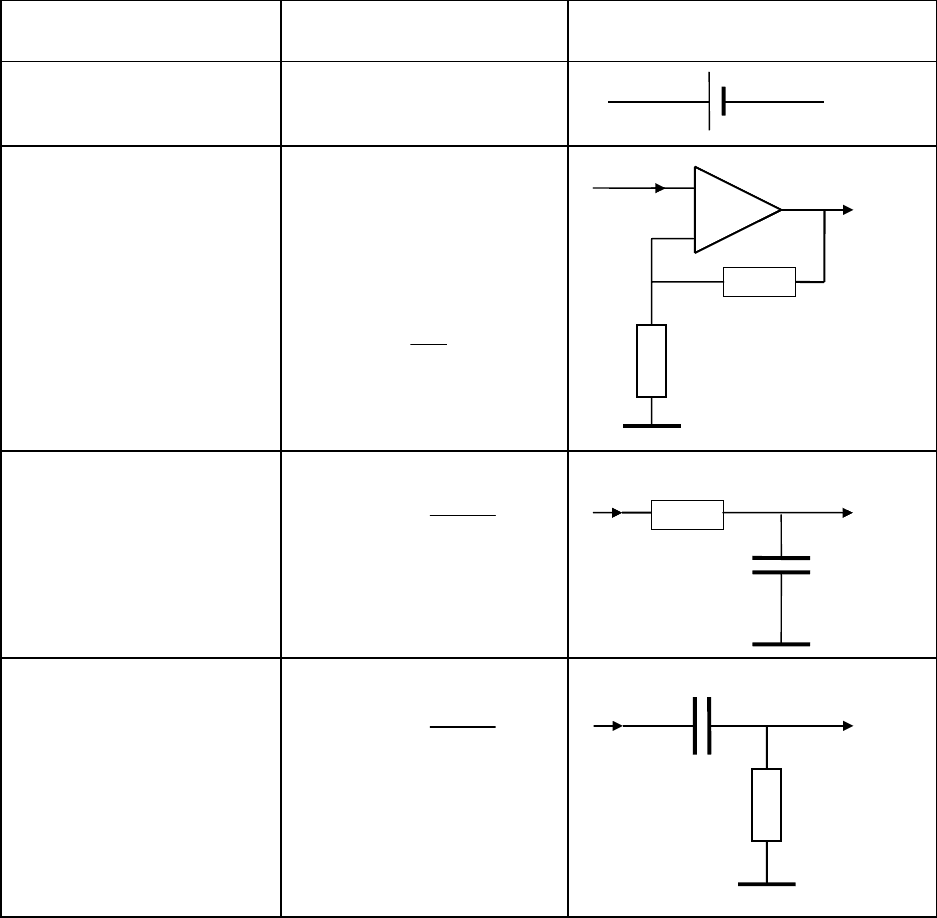
Таблица
Наименование
элемента
Функция передачи,
параметр
Электрический аналог
Батарея
U = 1 В
+
Усилительный
преобразователь
W(p) = k,
1
2
1
+=
R
R
k
+
_
R2
R1
Апериодический
преобразователь
()
RC
p
pW
=
+
=
τ
,
τ1
1
R
С
Дифференцирующий
преобразователь
()
RC
p
pW
=
+
=
τ
,
τ1
1
С
R
20
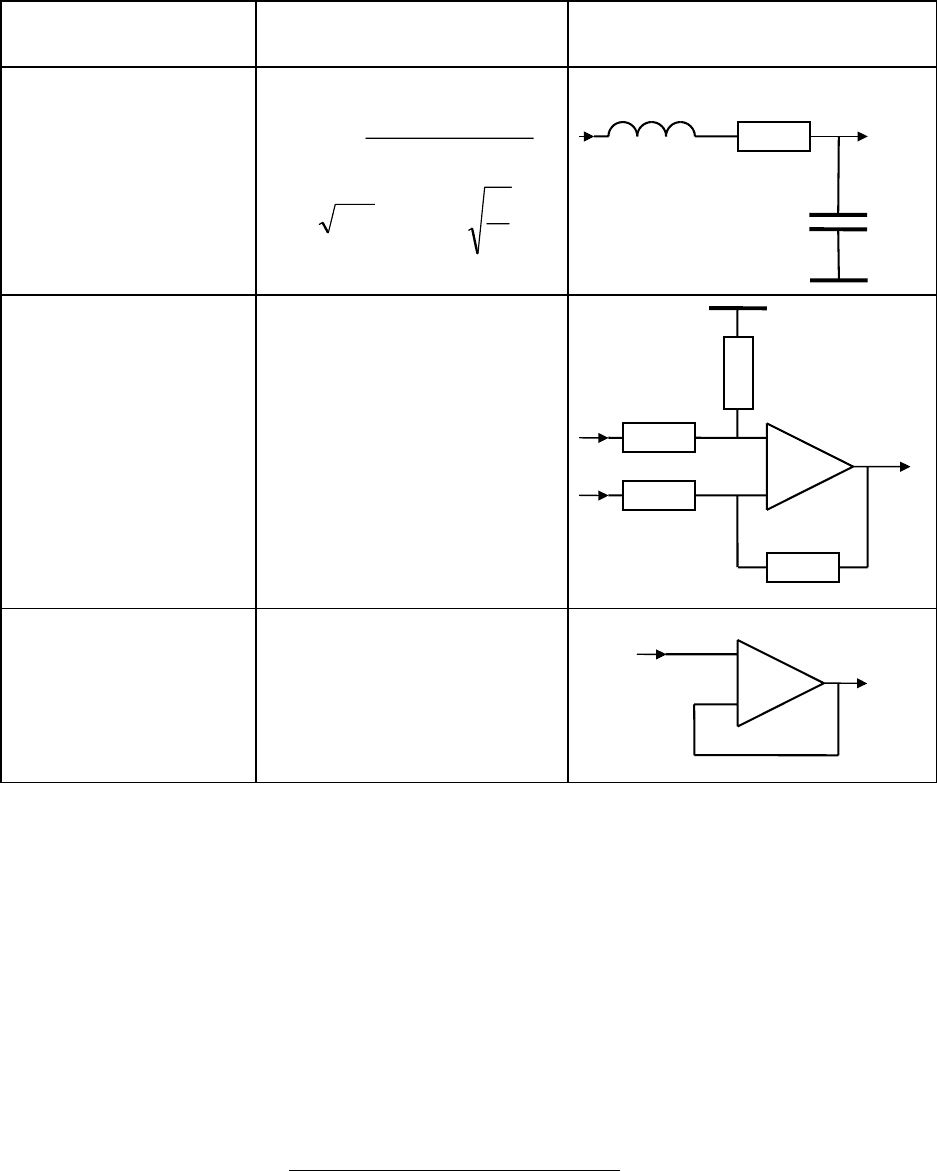
Окончание таблицы
Наименование
элемента
Функция передачи,
параметр
Электрический аналог
Колебательный
преобразователь
()
L
C
RLC
pp
pW
==
++
=
γ2,τ
,
ττγ21
1
22
L R
C
Разностный
элемент
U
ВЫХ
= U
1
- U
2
R
U
1
R
+ U
ВЫХ
U
2
−
R R
Буферный
элемент
U
ВЫХ
= U
ВХ
U
ВХ
+ U
ВЫХ
–
Приложение 2
ПОРЯДОК РАБОТЫ В САПР «MICROCAP-2»
После загрузки САПР «MICROCAP-2» на экране дисплея появляется
прямоугольное поле с курсором, который может перемещаться по
фиксированным позициям с помощью клавиш “←“ , “ ↑ “ , “→“ , “ ↓ “. На этом
прямоугольном поле создается изображение электрической схемы.
Над полем находится список основных команд (главное меню) системы.
Выбор той или иной команды производится нажатием клавиши,
соответствующей первой букве в названии команды.
Перечень основных команд
- Help - вывод на экран пояснений;
- Page - смена страницы (для больших схем);
- Enter - ввод компонента;
- Zap - удаление компонента или изменение его параметра;
- Short - ввод короткозамкнутой перемычки;
- Begin - начало перемычки, не имеющей соединений на пересечениях;
- End - конец перемычки, не имеющей соединений на пересечениях;