Марченко А.П., Рязанцев М.К., Шеховцов А.Ф. Двигуни внутрішнього згоряння: Серія підручників у 6 томах. Том 3. Комп’ютерні системи керування ДВЗ
Подождите немного. Документ загружается.

350
комплексних КСК ДВЗ. Однак, не проводячи їх системного аналізу, ми
обмежувались тим, що розглядали побудову конкретних систем керування
(структуру, специфіку датчиків та виконавчих пристроїв), виділяючи різні
підсистеми, цільові блоки й канали керування.
Результати проведеного ознайомлення компонентів КСК дозволяють
перейти до блок-схеми алгоритму функціонування, можливостей її реалі-
зації, необхідності корегування вироблених команд в адаптивних каналах,
тобто до системного аналізу комплексної КСК ДВЗ.
6.2.1. Функціональний аналіз комплексної КСК ДВЗ
Проведемо такий функціональний аналіз на прикладі комплексної
КСК чотирициліндрового двигуна з вприскуванням бензину для перспек-
тивних автомобілів (розробка НАМІ, Росія) [2].
КСК пройшла випробування на мікроавтобусі “РАФ”, оснащеному
двигуном “ЗМЗ” (літраж 2,3 л) й трикомпонентним нейтралізатором ВГ.
Вона реалізує комплекс функцій:
· автоматичний пуск і прогрів двигуна;
· фазове вприскування палива;
· електронне запалювання із вбудованим комутатором;
· підтримання частоти обертання колінчастого вала на режимі
холостого ходу;
· керування економайзером примусового холостого ходу;
· керування кутом випередження запалювання q за параметром
детонації;
· керування паливоподачею з зворотним зв’язком по концентрації
кисню у ВГ (l-регулювання);
· корекція управляючих параметрів за температурами охолоджува-
льної рідини й повітря, а також за положенням дросельної заслінки;
· динамічна корекція (при перехідних процесах);
· діагностування й аварійне реагування та сигналізація тощо.
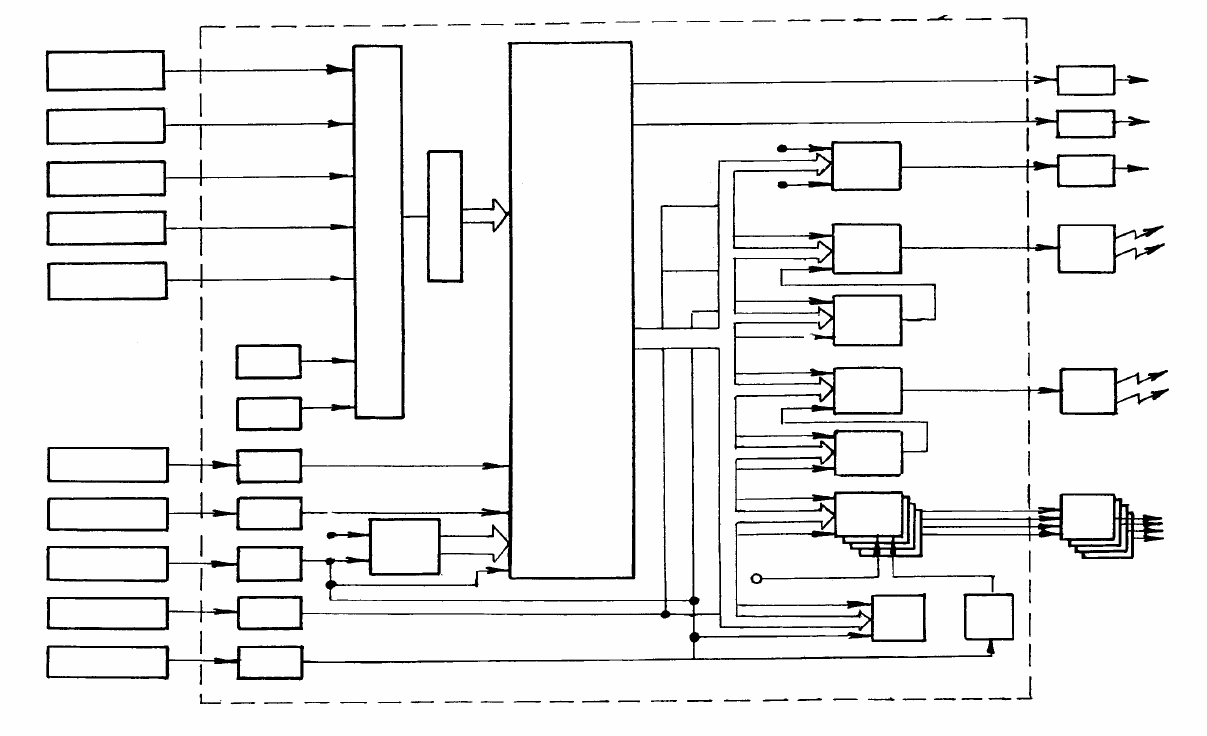
На рис. 6.1 показана структурна схема КСК, вишикуваної (при всій її
складності) у простий функціональний ряд: датчики – блок комплексного
керування – виконавчі пристрої.
Такі три функціональні групи включають:
датчики – масової витрати повітря (G
п
); положення дроселя (j); тем-
351
ператури охолоджувальної рідини (t
ох
); температури повітря на впуску (t
s
);
концентрації кисню у ВГ (l-зонд); детонації (ДЕТ); ВМТ; положення ко-
лінчастого вала – кутових міток (КМ); стану стартера (СТ); ідентифікації
першого циліндра (1Ц);
блок комплексного керування (БК) – бортовий комп’ютер з ОЗП;
АЦП; комутатор; канали адаптивного (локального) керування та інші елек-
тронні виконавчі пристрої;
основні виконавчі пристрої – електромагнітні форсунки (Ф); двови-
відні котушки запалювання з електронним керуванням (КЗ); регулятори
додаткового повітря для нейтралізатора (РДП); реле бензонасоса (РБН);
сигналізатор аварійної ситуації (АС).
Обробку вхідної інформації, що надходить, організовано системно
програмним способом, що дозволяє швидко адаптувати КСК до різних
змін при ладнанні, а також до різних двигунів.
Розглянемо функціональні особливості структурних складових КСК.
Безпосередня реєстрація маси повітря, що витрачається, за допомо-
гою термоанемометричного датчика, який має високу швидкодію, є осно-
вою для визначення параметрів керування в КСК. Сигнал датчика містить
змінну, що відповідає пульсаціям повітряного потоку у впускній трубі, де
він вимірюється.
Циклове наповнення при цьому для кожного циліндра розраховуєть-
ся за середнім значенням, яке формується методом інтегрування сигналу
датчика за один оберт колінчастого вала. Це дозволяє звести до мінімуму
вплив коливань частоти обертання вала й повітряного потоку у впускній
системі під час циклу й підвищити якість керування двигуном.
Датчик j потенціометричного типу визначає кутове положення дро-
сельної заслінки й має лінійну характеристику за кутом обертання.
Для вимірювань Т
ох
та Т
s
використовуються однакові напівпроводни-
кові датчики з лінійною характеристикою. Тарування каналів вимірювання
температур проводять в діапазоні – 40 ... + 120 °С.
l-зонд, який є гальванічним елементом, виступає джерелом напруги
з нелінійною характеристикою. Діапазон зміни напруги складає від 50 мВ
(бідна суміш) до 950 мВ (багата суміш) з різким перепадом напруги в зоні
стехіометричного (a » 1) складу горючої суміші.
352
G
п
j
Т
ах
Т
s
l
-зонд
ДЕТ
СТ
ВМТ
КМ
1Ц
И
бс
К
хх
ФПІ
ФПІ
ФПІ
ФПІ
ФПІ
Т
ТІ1
УІ
n
Преривання
К
омп’ютер
з ОЗП
Комутатор
АЦП
Т
2
Т
3
Т
4
Т
5
Т
6
Т
7
-Т
10
Т
11
ВЦ
Ф
К3
К3
РДП
РБН
АС
БУ
Виконавчі пристрої
Датчики
Датчики
ТІ2
ТІ
УІ
ТІ
ТІ
ТІ
УІ
УІ
УІ
УІ
УІ
УІ
ТІ
ТІ3
Рисунок 6.1 – Структурна схема комплексної КСК ДВЗ
353
Датчик детонації виконує функцію акселерометра для вимірювання
вібрацій деталей двигуна. Реєстрація виникнення детонації у камері зго-
ряння здійснюється шляхом порівняння рівнів шуму у двофазових вікнах
за кутом повороту колінчастого вала. У першому фазовому вікні, обраному
таким чином, що в ньому не може виникнути детонація у даному циліндрі
(такт стиску), вимірюється фоновий шум двигуна. Шум, виміряний у дру-
гому фазовому вікні (період згоряння), в якому може виявитися детонація,
порівнюється з фоновим шумом та залежно від їх співвідношення робиться
висновок про наявність детонації. Розташування й тривалість відкриття
(існування) фазових вікон повинні бути обрані із умови мінімізації вірогід-
ності неправильної реєстрації детонації.
Датчики G
n
, j, T
ox
, T
s
і l-зонд виробляють аналогові сигнали, які пе-
ретворюються у цифрові коди, придатні для обробки мікро-ЕОМ за допо-
могою АЦП.
Датчики ВМТ, КМ та 1Ц генерують імпульси напруги у моменти
проходження в їхньому магнітному полі відповідно: маркерного штифта,
запресованого в обід маховика; зубців ободу маховика; маркерного штиф-
та, запресованого у торцевій частині розподільного вала двигуна. Вихідні
сигнали цих датчиків за допомогою формувачів прямокутних імпульсів
(ФПІ) перетворюються в імпульси прямокутної форми, придатні для робо-
ти з цифровими мікросхемами. Імпульси від датчика ВМТ використову-
ються для синхронізації роботи БУ КСК з двигуном при створенні реаль-
ного моменту часу, а також для вимірювання частоти (n). Вимірювання n
здійснюється за кожний оберт за допомогою багаторозрядного (наприклад,
16-розрядного) програмно-керованого таймера (Т
1
). Імпульси, які отримані
від датчика КМ, використовуються для формування кута випередження за-
палювання q й тривалості протікання струму в первинному колі котушок
запалювання (t
кз
) за допомогою таймерів (Т). Датчик (1Ц) служить для іде-
нтифікації ВМТ першого циліндра з метою прив’язки керуючих діянь від-
повідно до порядка роботи циліндрів.
За вхідний сигнал використовується інформація про роботу стартера
(СТ).
Блок комплексного керування (БК) реалізується на основі бортової
мікро-ЕОМ. В БК мається можливість регулювання паливоподачі на ре-
жимі холостого ходу за допомогою потенціометра К
хх
, а також вимірюєть-
354
ся напруга бортового кола Ц
БЦ
, за значенням якого корегується тривалість
імпульсів, що керують форсунками (Ф). Формування часових та фазових
тривалостей, необхідних для роботи виконавчих пристроїв, здійснюється
за допомогою таймерів Т
1
– Т
2
. Кожний таймер Т
і
має три входи : інформа-
ційний, що забезпечує обмін інформацією з мікро-ЕОМ; керуючий, на
який надходять керуючі (командні) імпульси (КІ); тактовий, на який пода-
ються імпульси тактової частоти (ТІ), кожний з яких зменшує зміст Т на
одиницю. Для зберігання даних, отриманих від датчиків, виконання необ-
хідних проміжних обчислень, зберігання необхідних констант і т.д. вико-
ристовується оперативний запам’ятовуючий пристрій (ОЗП), наприклад,
самого комп’ютера. Для зберігання програмного забезпечення, що реалізує
алгоритм керування (функціонування КСК), а також тарировочних харак-
теристик використовується перепрограмований пристрійний за-
пам’ятовуючий пристрій. На основі отриманої від датчиків комплексу ін-
формації блок керування (БК) й здійснює керування виконавчими при-
строями КСК двигуна.
Двовивідні котушки запалювання (КЗ) генерують високовольтні ім-
пульси одночасно на свічці запалювання в двох циліндрах. Тому за час ро-
бочого циклу (два оберти колінчастого вала) у кожному циліндрі чиняться
два іскрових розряди: один у кінці такту стиску (робочий), другий холос-
тий – у кінці такту випуску. Кожний канал керування КЗ має два таймери
Т
і
, перший з яких (Т
4
, Т
6
) забезпечує формування випередження запалю-
вання j
зап
, а другий (Т
3
, Т
5
) задає тривалість замкнених контактів первин-
ного цепу КЗ, причому Т
4
і Т
5
запускають відповідно Т
3
і Т
6
.
Циклова подача палива забезпечується у задані моменти часу для
кожного циліндра за допомогою Ф. При постійному перепаді тисків у па-
ливній магістралі та у впускному трубопроводі кількість палива, яка над-
ходить крізь форсунки Ф, обумовлюється тривалістю їх відкриття, яка фор-
мується БК за допомогою таймерів Т
7
, Т
10
(на кожну форсунку – за тайме-
ром). У КСК реалізоване фазове вприскування палива. Відсліджування
моменту (фази) початку вприскування бензину здійснюється таймером Т
11
,
який запускає в потрібний момент один з таймерів Т
7
– Т
10
за схемою ви-
бору (порядку роботи)циліндрів (ВЦ).
Канал керування РДП має власний таймер Т
2
, в якому комп’ютер ви-
дає код, пропорційний куту відкриття РДП.
355
Крізь РБН здійснюється вмикання електробензонасоса.
Сигналізація аварійна (АС) спрацьовує у випадку виявлення діагнос-
тичними тестами несправності, потім сигнал надходить на приладову па-
нель водія.
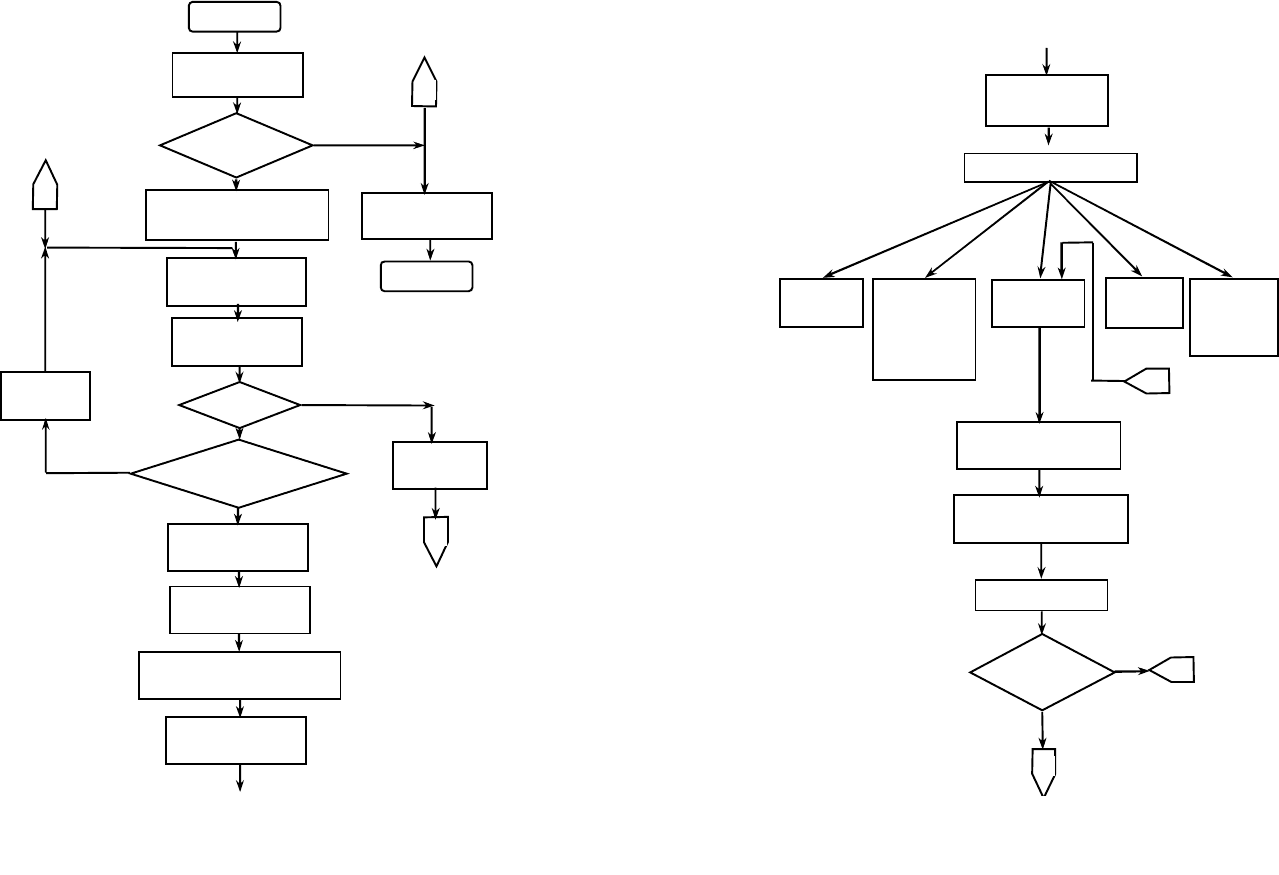
Функціонування КСК здійснюється таким чином (на рис.6.2 показана
схема його алгоритму).
Загальний принцип побудови програмного забезпечення наведеного
алгоритму керування – блочний; кожна підпрограма реалізована у вигляді
самостійного модуля. Функціонування окремого програмного модуля по-
чинається з визначення необхідності його роботи у даному циклі керуван-
ня, тобто перевіряється відповідність поточних параметрів ДВЗ робочої
області програми, а також алгоритмічна допустимість її роботи. Якщо про-
грама у даному циклі керування не працює, то виконується, у разі необхід-
ності, її ініціалізація у вихідний (початковий) стан та керування передаєть-
ся наступному програмному модулю.
Після успішного завершення тестів керування передається програмі
ініціалізації системи керування, яка здійснює настроювання каналів інтер-
фейсу, таймерів, готує ОЗП до роботи КСК, проводить ініціалізацію всіх
програм. До початку режиму пуску за допомогою стартера на 2 с вмакаєть-
ся електробензонасос з метою створення необхідного тиску у паливній ма-
гістралі. Система керування підготовлена до роботи – програмне забезпе-
чення “зависає”, чекаючи переривань, які чередуються упродовж робочого
процесу ДВЗ кожні півоберти колінчастого вала двигуна.
З початком переривань здійснюється опитування датчиків та обробка
отриманої інформації, яка записується й зберігається у ОЗП та використо-
вується усіма програмами.
В режимі пуску, ознакою чого є працюючий стартер, вмикається
електробензонасос та здійснюються керувальні діяння на виконавчі при-
строї. Тривалість командного імпульсу на вприскування t
впр
є функцією n і
t
ох
; випередження запалювання є функцією n, регулятор РДП повністю від-
критий.
При вимкненому стартері аналізується величина n. Якщо поточне
значення n менше заданого n, то це ідентифікується як невдалий пуск, вна-
слідок чого t
впр
і t
кз
дорівнюють нулю й електробензонасос відключається.
356
Визначення
d
зносу
=f(n)
Диспетчер режимів
Корекція по
поло
женню
дросельної
заслінки
Цифр
о
вий
фільтр
Видача
керую
чих
д
і
янь
Діагностика
Система
працездатна?
ХХ т
а
ПХХ
l
-ре-
гулятор
Зміна інформаці
й-
ного кадру
3
(Продовження)
Регул
ю-
вання по
детонації
2
1
ні
да
Початок
Діагностичні
тести
Ініціалізація си
с
теми
керування
Чекання
переривання
Опитування
датчиків
Пуск
Динамічна
к
о
рекція
Корекція
G
п
, по Т
ох
Тести
пройшли ?
Двигун запущено ?
Визначення базових
значень t, q=f(G
п
,n)
G
, по
Т
Корекція
t, q по t
ох
Останов
ДВЗ
Аварійна
сигналізація
Кінець
Пусковий
режим
2
1
3
ні
ні
да
Рисунок 6.2 – Блок-схема алгоритму функціонування КСК ДВЗ:
1-3 – канали зв’язку, обірвані для економії місця
357
У випадку успішного пуску корекція виміряного значення напруги
U
п
датчика масової витрати повітря G
п
за температурою Т
s
здійснюється на
працюючому двигуні. По розрахованим значенням U
п
за допомогою харак-
теристики датчика, що зберігається у пам’яті БК, визначається величина
витрати повітря.
Динамічна корекція враховує темп діяння водія на педаль керування
дросельною заслінкою.
Базові значення t
впр
та q визначаються як функції G
п
та n за табли-
цею, яка зберігається у пам’яті БК, а потім корегуються за Т
ох
. Величина t
кз
визначається як функція n.
Режими роботи двигуна ідентифікуються відповідно до алгоритму
керування і з використанням програмного диспетчера. Ознакою режиму
холостого ходу (ХХ) або примусового холостого ходу (ПХХ) є закритий
дросель. За величиною Т
ох
визначається значення n
т
, відносно якого фор-
мується гістерезис переходу з ХХ на ПХХ й назад, з плавною зміною кое-
фіцієнта регулювання за визначений термін часу. Незалежно від зовніш-
нього навантаження забезпечується визначений, що залежить від Т
ох
, рі-
вень n. Регулювання досягається за рахунок зміни наповнення циліндрів й
j
зап
двигуна. Зміна наповнення з використанням регулятора додаткового
повітря РДП здійснюється методом пропорційно-інтегрального регулю-
вання, а керування величиною j
зап
– методом пропорційного регулювання.
Сигналом неузгодженості служить відхилення виміряного значення n від
заданого n
т
(n
т
– поточне значення).
Плавний вихід на зовнішню характеристику двигуна здійснюється за
рахунок корекції базових значень t
впр
і j
зап
по положенню дросельної за-
слінки з використанням коефіцієнтів, які зберігаються у пам’яті БК й зале-
жних від n, j
зап
.
В алгоритмі керування передбачена ідентифікація режимної області
роботи двигуна, де вступає в дію l-регулювання. В цій зоні для керування
цикловою подачею палива використовується інформація, яка надходить від
l-зонду, й здійснюється дворежимна корекція середньої циклової подачі
палива для кожного циліндра. Дворежимний метод корекції дозволяє під-
тримувати стехіометричний склад суміші з достатньою точністю, що за-
безпечує ефективну роботу трикомпонентного нейтралізатора.
358
Алгоритм керування кутом j із зворотним зв’язком по детонації до-
зволяє адекватно ідентифікувати у кожному циліндрі робочий цикл з дето-
нацією та підготувати керуюче діяння з корекцією за j до моменту наступ-
ного робочого циклу. За наявності детонації значення j стрибкоподібно
зменшується, але не більше ніж на 15 град. П.К.В. Це передбачено для ава-
рійної ситуації, наприклад, у випадку обривання кабелю до датчика дето-
нації. Після зникнення детонації значення j плавно зростає до потрібного
табличного значення.
Цифровий фільтр дозволяє регулювати темп зміни керуючих параме-
трів.
Після завершення коригувань здійснюється видача керуючих діянь
шляхом занесення відповідних кодів у таймери. Параметри таких діянь за-
пам’ятовуються в ОЗП БК та використовуються для реалізації цифрового
фільтра й динамічної корекції.
У кожний циліндр паливо вприскується один раз за кожні два оберти
колінчастого вала у задані моменти відносно робочого такту цього цилінд-
ра (застосовано так зване послідовне фазоване вприскування). У зв’язку з
цим КСК ДВЗ має чотири незалежних окінцевих ступеня для керування
форсунками Ф. Момент вприскування обраний за умовою зменшення ток-
сичності викидів з ВГ та покращення плавності ходу на режимах часткових
навантажень двигуна.
Алгоритм керування, окрім функціональних вимог щодо реалізації з
необхідною точністю й швидкодією командних (керуючих) діянь, залежно
від основних режимів роботи двигуна з урахуванням корегуючих факторів,
реалізує групу не менш важливих вимог, що забезпечують їздові якості, ді-
агностичні й аварійно-попереджувальні функції.
Діагностування, аварійно-попереджувальний захист та сигналізація
націлені на зниження максимальних циклових подач палива, в тому числі й
зупинку двигуна при перевищенні визначених як порогові сигнали датчи-
ків у місцях контролю.
З виходом комп’ютера з ладу БК залишається життєздатним, не
втрачає гнучкості керування. У випадку, що розглядається, аварійний ре-
жим функціонування БК дозволяє автобусу доїхати до станції технічного
обслуговування.
359
Закінчуючи розгляд та системний аналіз сучасної комплексної КСК
ДВЗ, зазначимо, що схема, наведена на рис. 6.1, не містить та й не може
містити весь набір датчиків й виконавчих пристроїв, які розглядалися у
главах 3–6.
Наддув, АРТСД та інші засоби поліпшення експлуатаційної характе-
ристики двигуна, безумовно, ускладнили б КСК, не вносячи між тим прин-
ципових змін у її структурну схему.
Однак вже з розгляду конкретної комплексної КСК ДВЗ можна зро-
зуміти структурні, функціональні особливості і можливості саме таких си-
стем керування.
Принципово, що у схемі цієї, як й інших, комплексної КСК чітко ви-
рисовуються її функціональні компоненти: дві підсистеми керування пали-
во- та повітропостачанням, а також набір блоків (каналів, контурів) лока-
льного керування за обраними критеріями. Структура КСК, таким чином,
складається з функціональних рядів: датчики КПСК (КБК та ін.) – засоби
автоматичного керування виконавчі пристрої, що відповідає структурній
побудові КСК ДВЗ в цілому.
Розглянутий системний підхід до побудови і аналізу КСК може ви-
користовуватися для комплексних систем керування двигунами внутріш-
нього згоряння будь-яких типів та призначень.
Ще раз підкреслимо, що принцип комплексної побудови сучасних
КСК ДВЗ єдино сприяє досягненню найвищого ефекту від їх використання
у складі силових установок.
Це підтвердив і досвід експлуатації розглянутої комп’ютерної систе-
ми керування у складі мікроавтобуса “РАФ”, що виявив такі її переваги:
поліпшення паливної економічності за рахунок більш точної реа-
лізації законів керування у всьому діапазоні швидкісних та навантажува-
льних режимів двигуна;
зниження токсичності ВГ та задовольняння перспективних жорс-
тких норм по токсичності в результаті більш точного дозування палива,
оптимізації випередження запалювання, використання l- регулювання й
трикомпонентного нейтралізатора;
зниження мінімальної частоти обертання колінчастого вала на
режимі холостого ходу за рахунок більш високої якості регулювання, по-
ліпшення пристосованості двигуна;