Марченко А.П., Рязанцев М.К., Шеховцов А.Ф. Двигуни внутрішнього згоряння: Серія підручників у 6 томах. Том 3. Комп’ютерні системи керування ДВЗ
Подождите немного. Документ загружается.

190
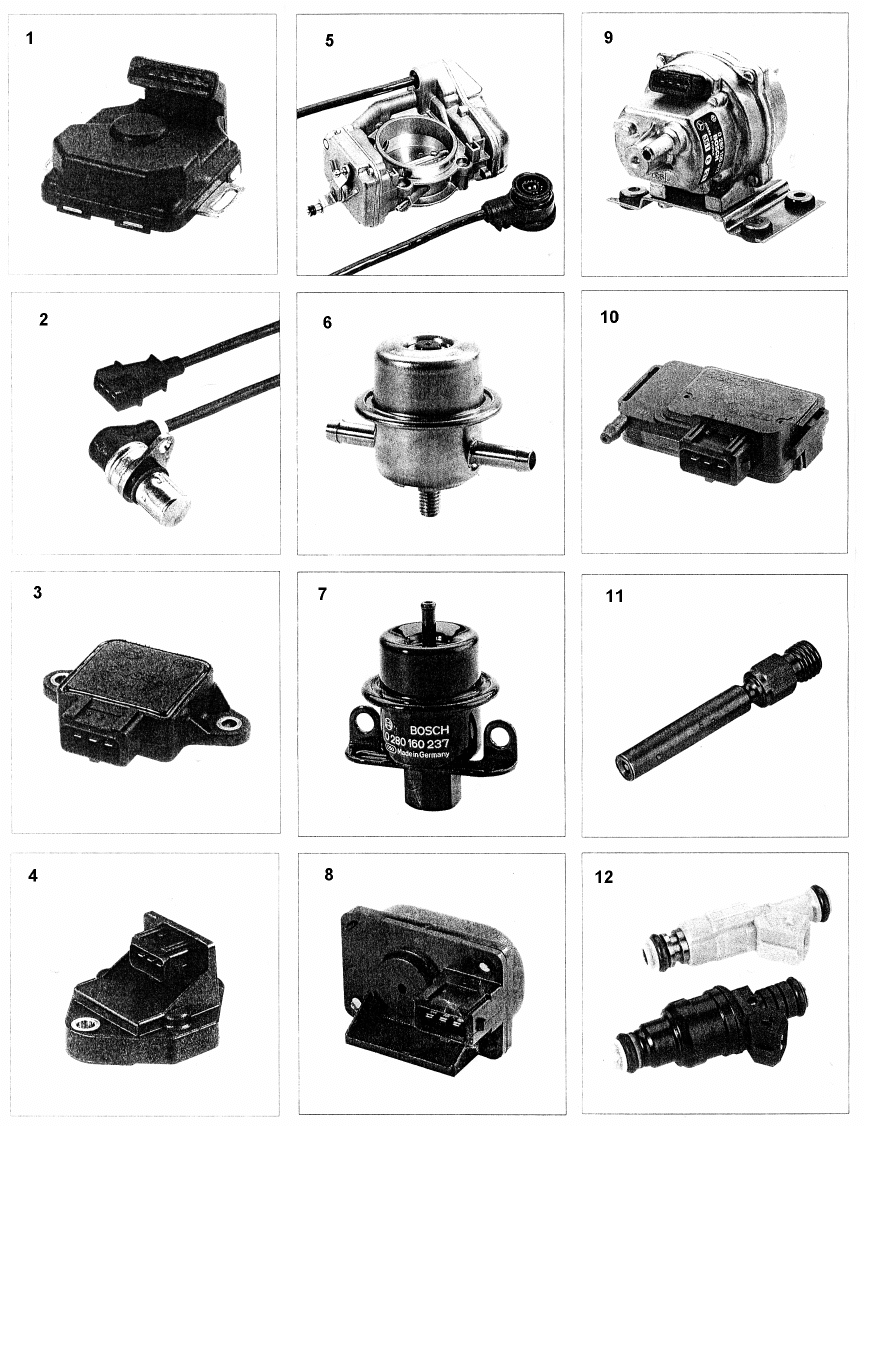
Рисунок 3.69 –
Датчики та виконавчі пристрої сучасної КПСК
паливоподачею (Motronic) (початок):
1 – датчик прискорення; 2 – датчик положення колінвала; 3 – датчик положення
дроселя; 4 – кінцевий вимикач дроселя; 5 – вузол дроселя з пневмопривідом;
6 – демпфер тиску палива; 7 – регулятор тиску палива; 8 – датчик абсолютного
тиску; 9 – датчик абсолютного тиску (D-Jetronic); 10 –
датчик абсолютного тиску;
11 – механічна форсунка; 12 – електромагнітна форсунка
191
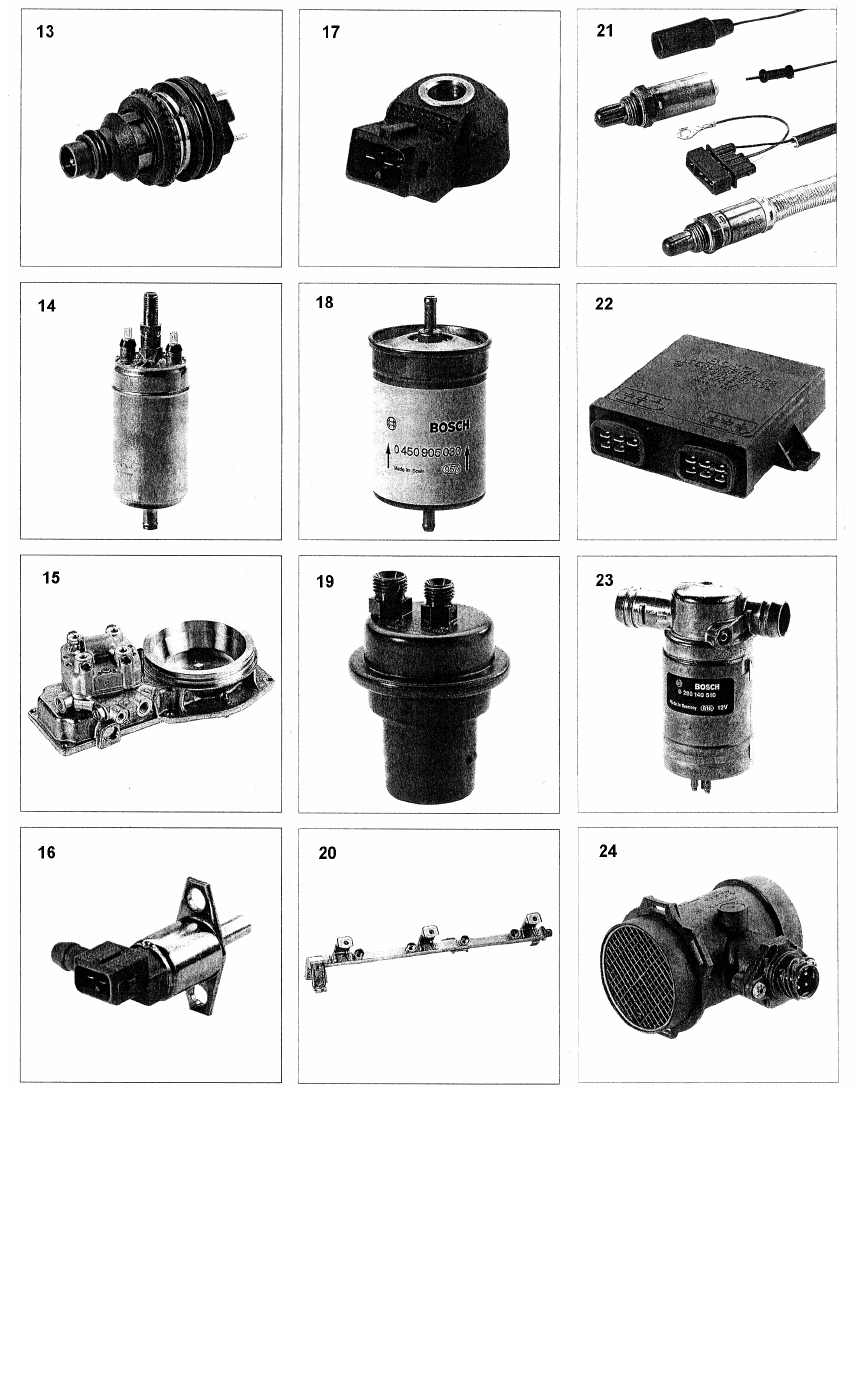
Рисунок 3.69 (продовження):
13 – форсунка; 14 – бензонасос; 15 – регулятор складу суміші; 16 –
пускова
форсунка; 17 – датчик детонації; 18 – паливний фільтр; 19 – накопичувач
палива; 20 – паливна рампа; 21 – l-зонд; 22 – комутатор електронний; 23 –
клапан х.х. з кроковим електродвигуном; 24 –
термоанемометричний
витратомір повітря
192
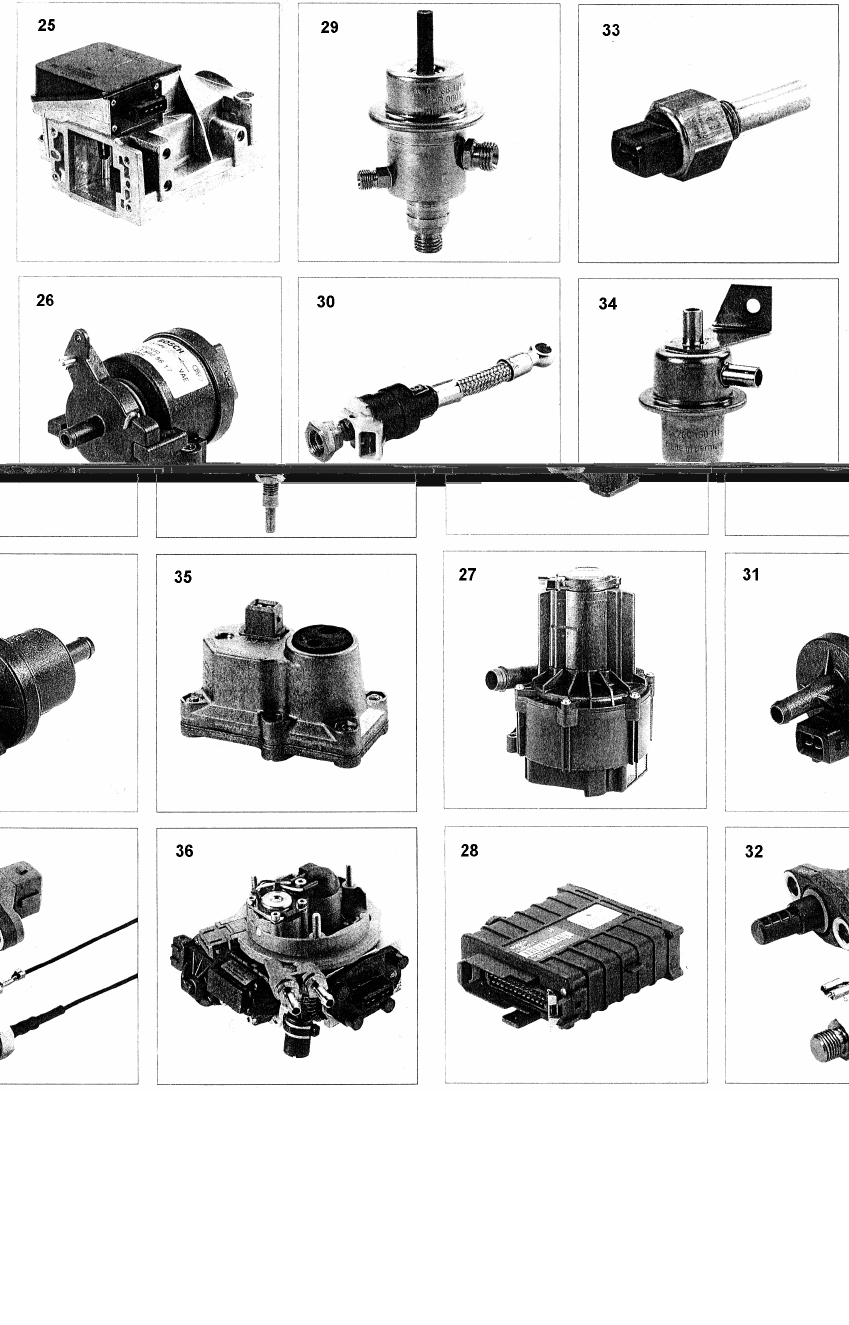
Рисунок 3.69 (закінчення):
25 – витратомір повітря газодинамічний; 26 – модуль педалі акселерато
ра;
27 – адсорбер; 28 – контролер електронний; 29 – регулятор тиску; 30 – кла-
пан перепуску палива при
l
-регулюванні; 31 – клапан вентиляції паливного ба-
ку; 32 – температурний датчик; 33 – датчик температури; 34 – вакуумний
регулятор; 35 – регулятор керувального тиску; 36 – вузол центрального
вприскування
193
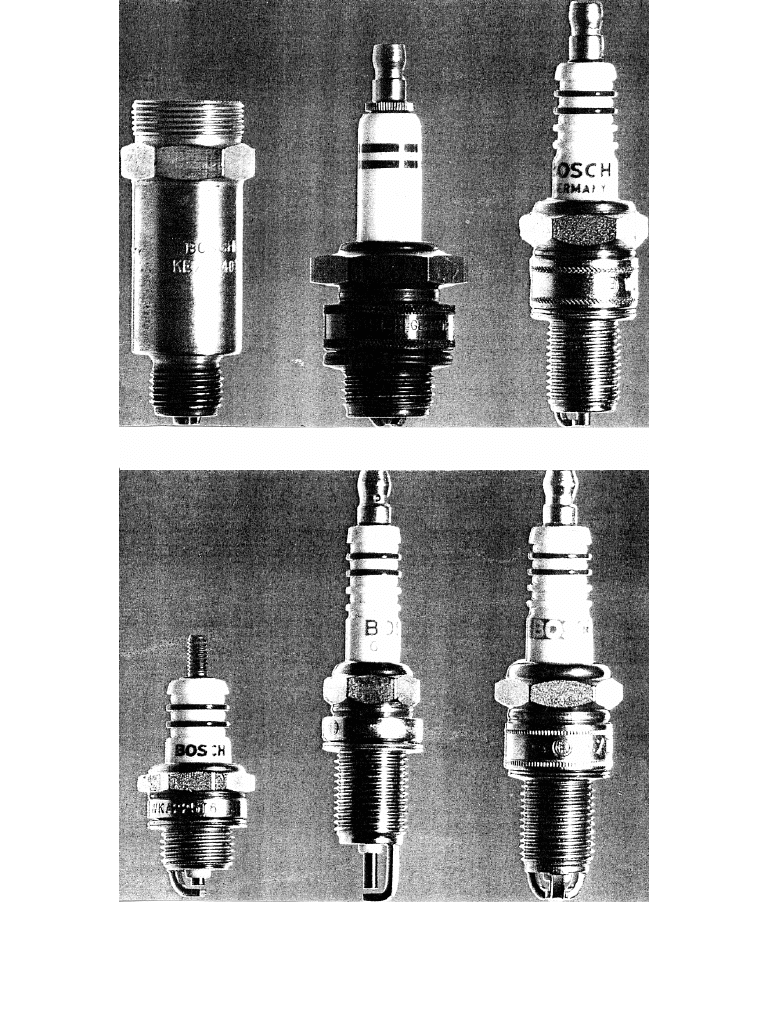
Рисунок 3.70 – Сучасні свічки запалювання
194
3.2. КПСК паливоподачею у дизелях
3.2.1. Можливості поліпшення паливоподачі у сучасних дизелях
Сьогодні провідні моторобудівні фірми суттєво розширюють вироб-
ництво швидкохідних дизелів для транспортних засобів, перш за все лег-
кових та малотоннажних вантажних автомобілів. До 2000 року вже 53 %
нових французьких, 20 % німецьких легкових автомобілів оснащено дизе-
лями з показниками (паливна економічність, токсичність), які дещо пере-
вищують рівні бензинових двигунів.
У першу чергу це пояснюється запровадженням КПСК паливопода-
чею на всіх моделях сучасних автотранспортних двигунів, що дозволяє оп-
тимізувати робочі процеси в широкому спектрі експлуатаційних режимів, і
перш за все – при перехідних процесах.
Тільки електронне керування у поєднанні з рекордними рівнями тис-
ків палива при вприскуванні (до 135–200 МПа) дозволило досягнути не
компромісних, а справді найбільш високих показників дизелів за експлуа-
таційною витратою палива, димністю, токсичністю, шумністю, механічни-
ми, тепловими навантаженнями тощо.
Однак ще не всі резерви поліпшення паливоподачі у дизелях вичер-
пано; це ж стосується й обмежень, наведених вище.
Тому фірми Росії (ЗАЗ, ЯМЗ та ін.), України (ХКБД, м. Харків) та за-
рубіжні (Mercedes-Benz; Volkswagen та Audi; AVL; Stays-Daimler-Puch AG;
Fiat; Robert Bosch i Daimler-Benz тощо) приділяють велику увагу розроб-
кам нових КПСК паливоподачею дизелів, причому не тільки таких, що ке-
рують цикловими подачами, але і якістю вприскування за рахунок керу-
вання моментом початку та тривалістю вприскування, його максимальним
тиском, формою характеристики паливоподачі.
Можна вважати комп’ютеризацію керування дизелів одним з генера-
льних напрямів технічного прогресу в моторобудуванні.
Заміна традиційних відцентрових чутливих елементів мікропроцесо-
рним керуванням дозволяє на значно вищому рівні знаходити нові можли-
вості розв’язувати задачі дво- та всережимного регулювання, особливо при
скиданнях-накидах навантажень, значно скоротивши перехідні процеси, та
зменшити середню експлуатаційну витрату палива та кількість токсичних
викидів при зниженні нерівномірності обертання колінчастого вала.
195
3.2.2. Вимоги до КПСК паливоподачею у дизелях
Накопичений досвід створення й використання КПСК паливопода-
чею дозволяє сформулювати такі основні вимоги до них:
· в умовах широкого спектра усталених експлуатаційних режимів
треба забезпечувати дозування циклової витрати палива при керуванні ку-
том випередження, тривалістю і формою характеристики вприскування з
адаптацією керованих параметрів до змін якості палива, зовнішніх умов,
спрацювання приводу ПНВТ та інших обмежень при мінімумах експлуа-
таційної витрати палива й рівня токсичних викидів;
· в умовах перехідних процесів (неусталені режими) необхідно за-
безпечити з потрібною швидкістю циклічність дії на дозатор палива для
зменшення тривалості таких процесів при дотриманні паливно-
екологічного критерію;
· повинна бути закладена реальна можливість реалізації максима-
льного тиску вприскування до 150–200 МПа за рахунок використання
(створення) виконавчих пристроїв зі зменшеними перестановочними зу-
силлями; треба також забезпечувати підвищення тиску вприскування при
низьких n та малих N
e
за рахунок акумуляторних схем паливоподачі, тощо.
Слід передбачити ступінчасте, багатофазне вприскування та інші заходи
щодо ефективності розпилювання і згоряння;
· у цілому, для конкретної моделі експлуатації двигуна потрібно
забезпечити оптимізацію керування роботою паливної апаратури за міні-
мальним g
e
або за іншою цільовою функцією при накладених обмеженнях.
Сучасні КПСК здатні виконувати складні функціональні задачі, на-
цілені на реалізацію сформульованих вимог, у тому числі:
гнучко регулювати циклову паливоподачу відповідно до заданого
швидкісного режиму двигуна та забезпечувати зовнішню швидкісну його
характеристику (не обов’язково жорстко задану);
забезпечувати мінімальну нерівномірність паливоподачі та кута
випередження вприскування (КВВ) для кожного циліндра;
оптимально регулювати КВВ відповідно до режиму роботи;
автоматизувати пуск; збагачувати за необхідності суміш при пус-
ку; виключати паливоподачу на примусовому холостому ході та здійсню-
вати регулювання a впродовж перехідного процесу;
196
робити відключення циліндрів та робочих циклів на часткових
режимах;
діагностувати датчики й виконавчі пристрої, компенсувати ті, що
вийшли з ладу, за допомогою резервних програм.
Для найпоширеної КПСК типу Common Rail додатково слід
реалізувати:
¨ оптимальне регулювання тиску й характеристики (закону) вприс-
кування;
¨ двофазне вприскування, в тому числі з мінімальною усталеною
запалювальною порцією, з керованим інтервалом між вприсками;
¨ регульоване додаткове вприскування (після основного) для розі-
гріву нейтралізатора на часткових режимах.
Перспективність різних КПСК звичайно оцінюють з урахуванням за-
безпечення зазначених функцій.
3.2.3. Схемні та конструктивні особливості підсистем керування
паливоподачею у дизелях
Електронізація дизелів відстає від могутньої мікропроцесорної тех-
ніки у двигунах з іскровим запалюванням. На те є причини.
По-перше, широка дизелізація автотранспорту почалася зовсім неда-
вно. По-друге, електронізація керування паливоподачею у дизелях супро-
воджується значними труднощами. Основна з них – необхідність реалізу-
вати командні сигнали в умовах надвисокого тиску вприскування, який на
декілька порядків перевищує таке у ДВЗ іскрового запалювання (200 МПа
та більше); при цьому зростають переставні зусилля для пересування дозу-
вальних елементів паливної апаратури за командними сигналам КПСК. Це
потребує створення виконавчих пристроїв з електромагнітами, що мають
особливо потужні магніторушійні сили. Слід також враховувати, що у ди-
зелях паливоподача до циліндрів скорочується (за часом) у декілька разів
порівняно з двигунами іскрового запалювання, тому потрібно різко підви-
щити швидкодію керувальних електромагнітів КПСК. Кращі фірми світу
ще не подолали зазначені труднощі.
Сьогодні вже розроблено й запроваджено дизельні КПСК паливопо-
дачею, де спочатку закладено принцип адаптивності, досвід реалізації яко-
го на бензинових ДВЗ є вже достатньо накопиченим. Тому поділяти КПСК
197
паливоподачею у дизелях на програмні та програмно-адаптивні недоціль-
но.
КПСК паливоподачею у дизелях реалізовані в таких формах:
² електронні регулятори n та N
e
;
² електронне керування характеристикою вприскування палива у
традиційних паливних системах;
² керування вприскуванням у паливних системах з акумуляторами
високого тиску й електрокерованими форсунками;
² керування вприскуванням в електронних паливних підсистемах з
гідропосиленням;
² гібридні схеми з електронним керуванням паливоподачею.
Перейдемо до розгляду кожного варіанта КПСК паливоподачею у
дизелях.
Електронні регулятори швидкості і потужності. Електронні при-
строї отримують все більшого поширення для керування дизелями у
зв’язку з тим, що можливості подальшого удосконалення механічних регу-
ляторів практично вичерпані.
Переваги електронних регуляторів (ЕР) виявляються у їх здатності,
завдяки дуже швидкій реакції на зміни n та N
e
, здійснювати керування ци-
кловою витратою палива залежно від теплового стану двигуна, тиску й
температури повітря для наддуву, питомої ваги палива та інших парамет-
рів, а не тільки від однієї частоти обертання колінчастого валу.
З урахуванням такої важливої переваги саме ЕР й досягли найбіль-
шого розвитку при запровадженні мікропроцесорної техніки у системи ке-
рування паливоподачею у дизелях.
Головним напрямком розробки ЕР є нарощування функціональних
можливостей КПСК шляхом підключення до неї все більшої багатопара-
метрової інформації щодо факторів та обмежень, які впливають на циклову
витрату палива.
На рис. 3.71 показана принципова схема ЕР дизеля, розробленого
японською фірмою Nippon Denso [1]. На дизелі розташовані датчики: час-
тоти обертання n, моменту початку вприскування – q, положення рейки
ПНВТ – h; тиску й температури повітря для наддуву – p
s
, t
s
; температур
охолоджувальної рідини й мастила – t
охол
, t
м
. Крім сигналів датчиків вхід-
ними діями на БСІ є сигнали 1–5. Керування рейкою 7 паливного насоса та
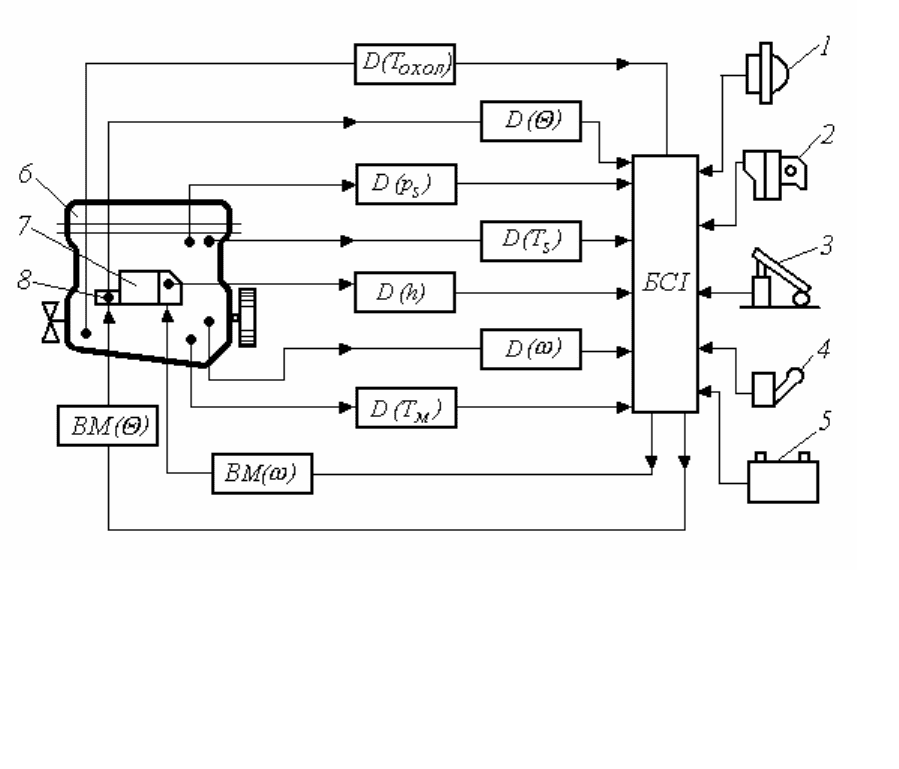
198
муфтою зміни КВВ 8 здійснюється виконавчими механізмами частоти обе-
ртання ВМ (w) та ВМ (q), що включають лінійні електромагніти й масти-
льні серводвигуни.
У комп’ютерний БСІ входять два восьмирозрядних мікропроцесори:
головний і допоміжний.
Головний процесор на основі сигналів визначає циклову подачу g
ц
палива й КВВ. Сигнал про g
ц
подається у допоміжний мікропроцесор, що
контролює роботу виконавчого механізму переміщення рейки шляхом по-
рівняння сигналів реального та потрібного положень. Допоміжний проце-
сор контролює також аналого-цифровий перетворювач (АЦП) й передає
цифрові сигнали до головного мікропроцесора.
Підкреслимо, що цифрові схеми керування на базі мікро ЕОМ дозво-
ляють здійснювати програмно-адаптоване, а в перспективі й адаптоване,
Рисунок 3.71 – Принципова схема ЕР швидкохідного дизеля:
1 – індикатор; 2 – стартер; 3- педаль керування; 4 – тумблер блока діагносту
вання;
5 – акумулятор; 6 – дизель; 7 – паливний насос високого тиску (ПНВТ); 8 –
муфта
випередження вприскування палива; 9 –
БСІ (блок синтезу інформації);
D – датчики; ВМ – виконавчі механізми (пристрої)
199
тобто таке, що само налагоджується з урахуванням вихідних показників
двигуна. Схема рис. 3.71 ґрунтується на рядному ПНВТ.
Розглядаючи електронне керування цикловою подачею й КВВ КПСК
з насосами розподільного типу, треба мати на увазі, що для переміщення
як дозатора g
ц
так і роликової шайби керування кутом q необхідні значно
менші переставні зусилля. Це створює передумови для упровадження такої
конструкції у серійне виробництво.
Комп’ютерне керування одночасно цикловою подачею g
ц
та КВВ
може бути реалізовано не так як на рис. 3.71 (традиційне золотникове до-
зування), а в результаті клапанного регулювання, тобто йдеться про прин-
ципово нові паливні системи з КПСК, які розглядатимуться далі.
Підкреслимо також, що електронні регулятори, як правило, не потре-
бують принципової реконструкції всієї традиційної системи паливоподачі.
Чутливі елементи, виконавчі механізми вбудовуються або обладнуються
на існуючі ПНВТ. Для реалізації ЕР необхідно лише створення відповід-
них (і різноманітних) приводів і механізмів та підключення до дизеля мік-
ро-ЕОМ.
Розглянемо приклади розробки ЕР діючих дизелів різного призна-
чення.
Почнемо з ЕР автомобільного дизеля фірми Bosch [6]. На рис. 3.72,
3.73 подано функціональну схему ЕР та його блоки для шестициліндрового
дизеля з рядним ПНВТ.
Бачимо, що ЕР здатний керувати такими параметрами, які механіч-
ними регуляторами не могли контролюватися. Йдеться про температуру
повітря для наддуву та його тиск, температуру палива та охолоджувальної
рідини тощо. ЕР також здійснює обмін даними з іншими електронними си-
стемами автомобіля, наприклад, керування тягою, трансмісією; це означає,
що ЕР може бути вбудовано у КСК автомобіля.
ЕР складається з трьох системних блоків (рис. 3.73):
1 – датчики і генератори зовнішніх впливів (від педалі акселератора,
вимикача гальм, зчеплення та ін.);
12 – БСІ, який використовує програмні алгоритми керування для
переробки сигналів датчиків у відповідні вихідні командні сигнали;