Малаханов А.А. Структурный синтез дискретного автомата
Подождите немного. Документ загружается.

1
Структурный синтез дискретного автомата
Постановка задачи
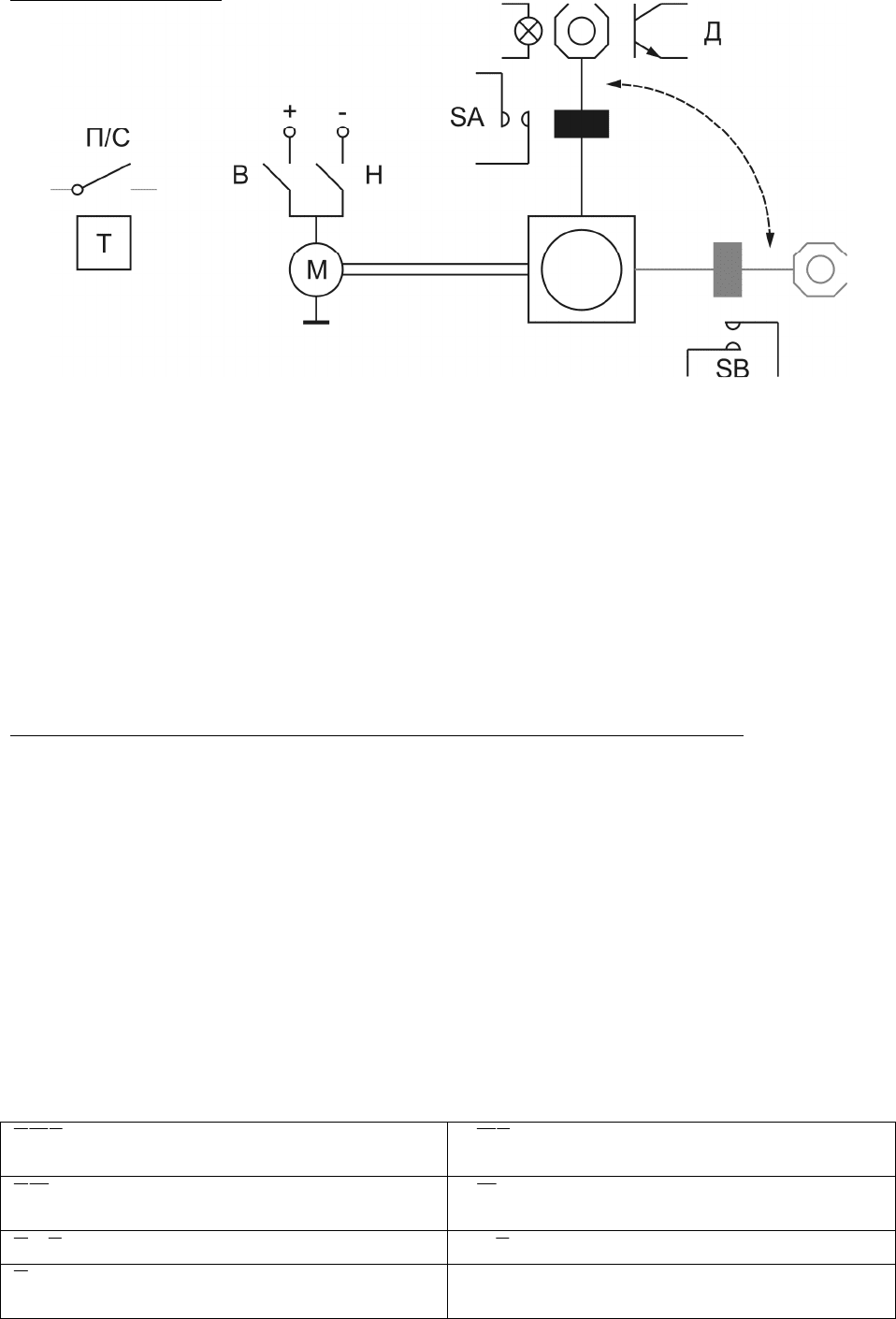
Имеется манипулятор, приводимый в движение электродвигателем
(М), который выполняет перемещение детали (Д) из верхней позиции в ниж-
нюю. Находясь в нижней позиции, манипулятор ожидает выполнения неко-
торой операции с деталью (в течение интервала времени Т), после чего воз-
вращается в верхнюю позицию за следующей деталью. Управление манипу-
лятором осуществляется с помощью команд «Пуск/Стоп», «Вперед» и «На-
зад». Интервал времени Т задается таймером. Наличие детали в верхней по-
зиции определяется с помощью фотодатчика Д. Перемещения манипулятора
ограничивают путевые выключатели SA и SB.
Определение входных, выходных сигналов и состояний автомата
Выходные сигналы – сигналы, по которым будет управляться двига-
тель, а также сигнал запуска для таймера.
Входные сигналы – сигнал пуска/останова двигателя, сигналы с путе-
вых выключателей, определяющие момент достижения крайних позиций, и
сигнал таймера, свидетельствующий о завершении интервала Т.
Для автомата Мура выделим состояния автомата, имея в виду, что
функция выходов автомата Мура зависит только от текущего состояния. То-
гда, исключив КЛУ2, целесообразно сформировать состояния автомата, как
комбинации выходных переменных. Выходных сигналов три: «вперед», «на-
зад» и «пуск таймера». Обозначим их соответственно В, Н и Т. Три сигнала
дадут 8 комбинаций. Проанализируем их:
Т
Н
В
– ничего не работает. Может служить исход-
ным состоянием.
Т
Н
В
– движение вперед.
Т
Н
В
– включение таймера при выключенном дви-
гателе. Пригодится в нижней позиции.
Т
Н
В
– движение вперед с запуском таймера. Не
требуется.
Т
Н
В
– движение назад.
Т
ВН
– … интересно, что из этого выйдет?
НТ
В
– движение назад с запуском таймера. Не
требуется.
ВНТ
– … как, впрочем, и из этого …
2
Таким образом, достаточно четырех состояний для полного описания
алгоритма работы манипулятора, по которым составим направленный граф.
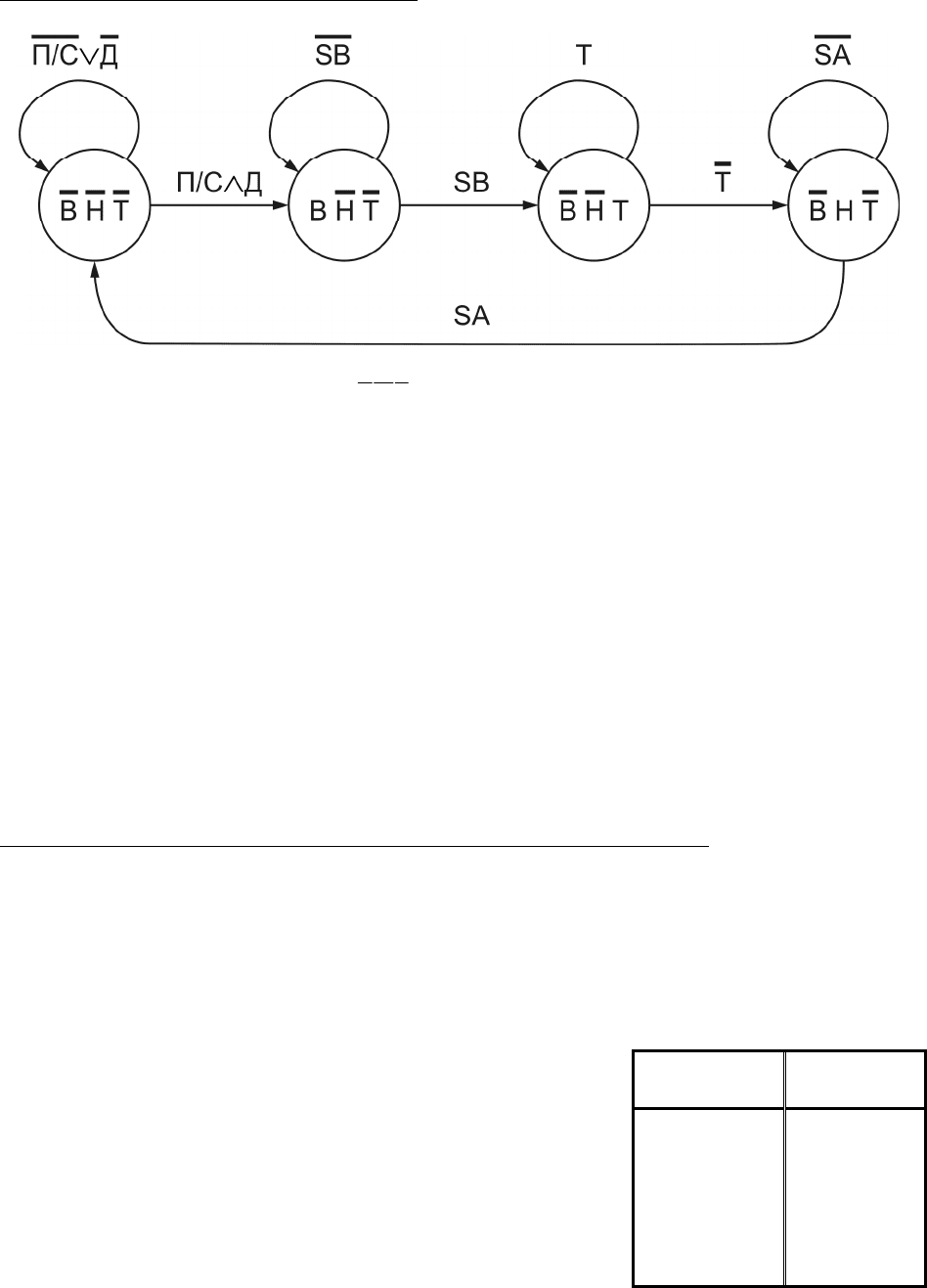
Направленный граф автомата Мура
В исходном состоянии (
Т
Н
В
)
двигатель выключен, таймер не работает.
Отсутствие детали или отсутствие пуска манипулятора не изменяет текущего
состояния. Выход из исходного состояния возможен при соблюдении двух
условий: нажатия кнопки «Пуск» и наличия детали в верхней позиции. После
этого автомат переходит во второе состояние и запускает двигатель «впе-
ред». Смена данного состояния возможна только после срабатывания путево-
го выключателя SB в нижней позиции. Пока SB не сработал, состояние оста-
ется прежним. Достигнув нижней позиции, необходимо запустить таймер на
отсчет интервала Т (третье состояние), причем условие смены состояния
также одно – сигнал с таймера о завершении счета (или завершение работы
таймера). Последнее состояние описывает движение манипулятора назад, ко-
торое прекращается (а соответственно изменяется состояние автомата) при
достижении верхней позиции (срабатывания путевого выключателя SA).
Примеры реализации асинхронного и синхронного автомата
Для хранения четырех состояний достаточно двух триггеров. Но в этом
случае потребуется КЛУ2 для декодирования обозначенных состояний.
Можно использовать лишний триггер, тогда выходные логические сигналы
можно получить непосредственно с выходов триггеров. Вообще кодирование
состояний (тем более, соседнее кодирование) позволяет параллельно решить
и ряд других задач (см. конспект лекций), а в данном случае использовать
минимальное количество триггеров. В общем виде
однозначно сформулировать, что лучше: лишние
триггеры или КЛУ2, затруднительно, поэтому вы-
бор должен определяться исходя из требований
конкретной задачи.
В дальнейших примерах будем использовать
закодированные состояния (см. таблицу).
В Н Т Q1 Q0
0 0 0 0 0
1 0 0 0 1
0 0 1 1 1
0 1 0 1 0
3
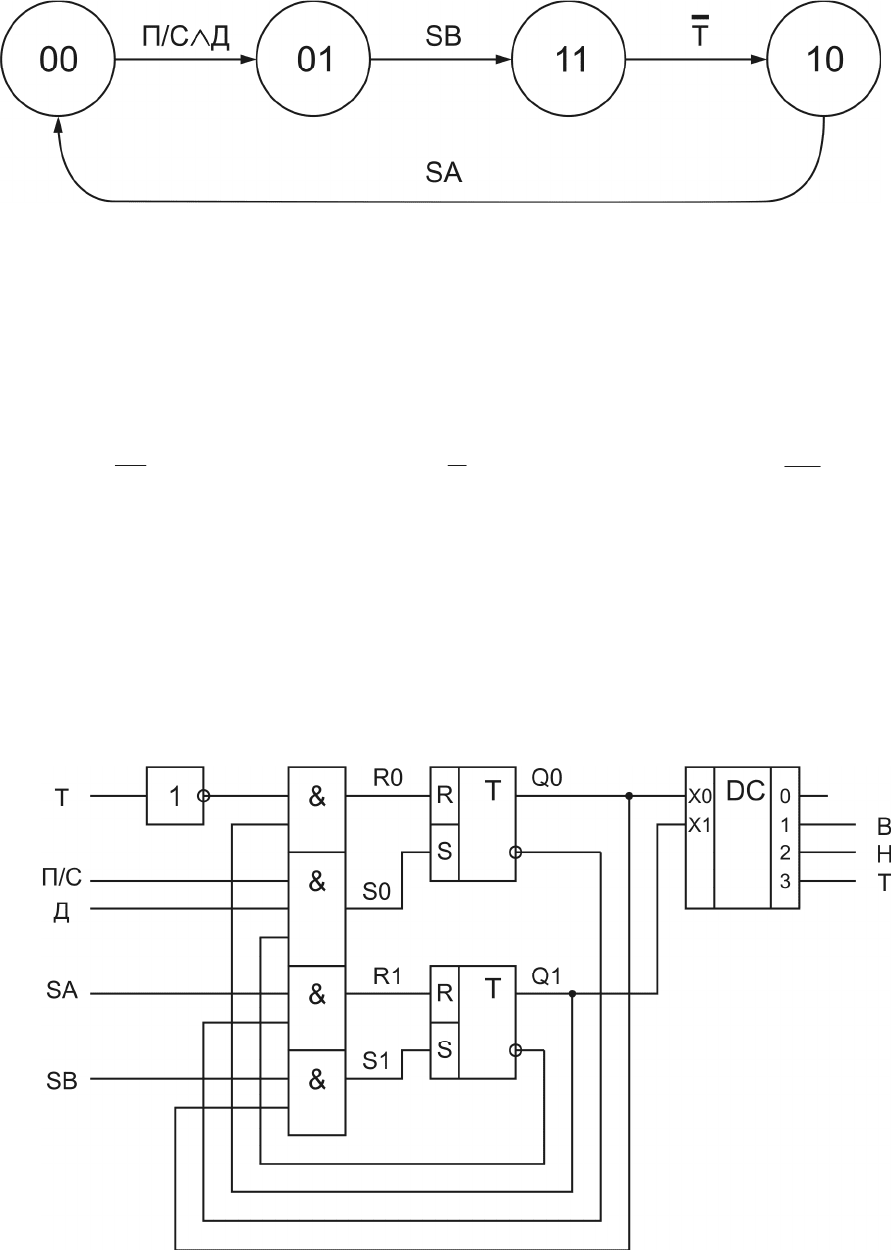
а) Синтез асинхронного автомата Мура
С учетом кодирования направленный граф будет выглядеть следую-
щим образом:
Составим функции установки и сброса для разрядов состояний.
Функция установки записывается в виде дизъюнкции конъюнкций раз-
рядов состояния (за исключением того разряда, для которого записывается
функция) и условия перехода. В функцию входят только те переходы и со-
стояния, в которых требуемый разряд переходит из «0» в «1». Функция сбро-
са записывается аналогично, только для состояний и переходов, где в тре-
буемом разряде выполняется переход из «1» в «0». Таким образом:
ДСПQS ⋅⋅= /0
1
;
TQR ⋅=
1
0
;
SBQS
⋅
=
0
1
;
SAQR ⋅=
0
1
.
На
основании
полученных
функций
составляем
схему
КЛУ
1,
которая
довольно
просто
реализуется
на
логических
элементах
.
КЛУ
2
также
можно
построить
на
логических
элементах
,
реализовав
таблицу
состояний
,
приве
-
денную
выше
.
Однако
,
внимательно
проанализировав
таблицу
,
целесообраз
-
но
применить
дешифратор
для
построения
КЛУ
2.
Схема
дискретного
авто
-
мата
будет
выглядеть
следующим
образом
:
4
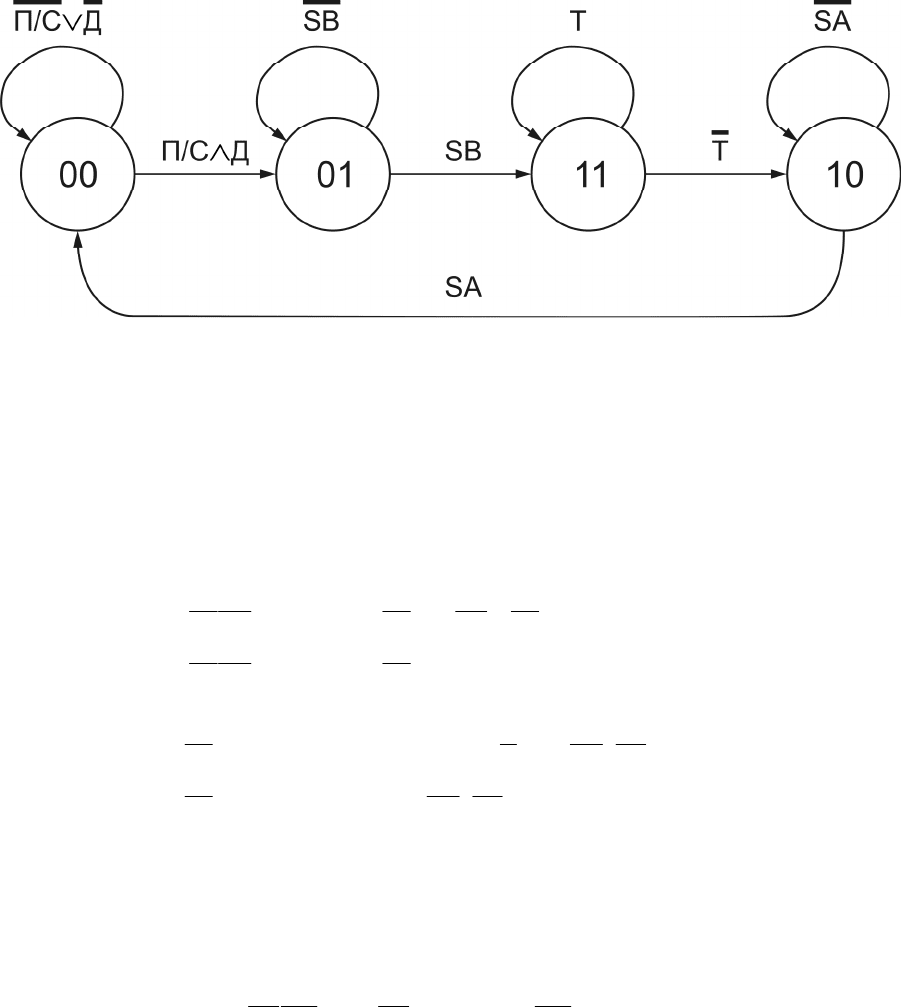
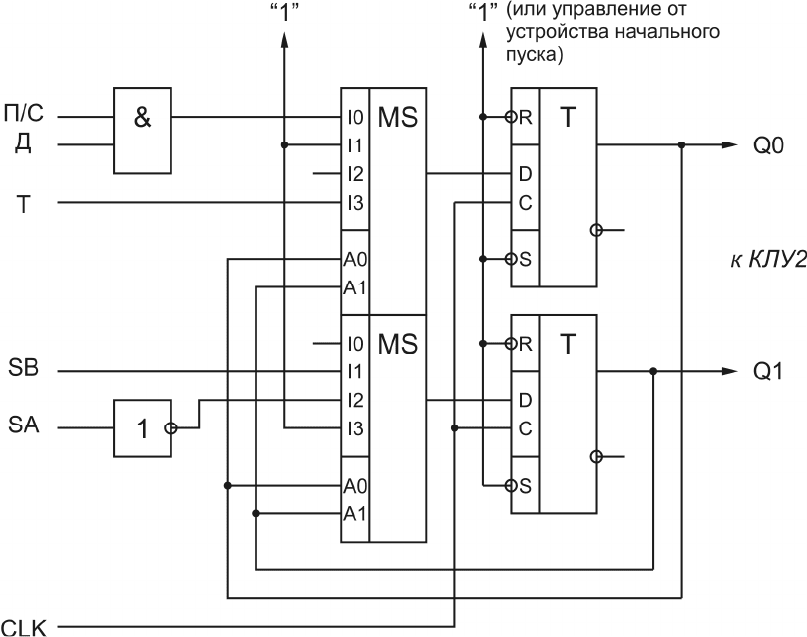
б) Синтез синхронного автомата Мура
С учетом кодирования направленный граф будет выглядеть следую-
щим образом:
Составим функции возбуждения памяти.
Функция возбуждения памяти записывается в виде дизъюнкции конъ-
юнкций разрядов состояния (включая тот разряд, для которого записывается
функция, и петли) и условия перехода. В функцию входят только те перехо-
ды и состояния, в которых требуемый разряд переходит из «0» в «1» или со-
храняет при переходе единичное значение. Таким образом:
TQQQQДСПQQ
TQQSBQQSBQQДСПQQD
⋅++⋅⋅=
=⋅+⋅+⋅+⋅⋅=
0
1
0
1
/
0
1
010101
/
01
0
SAQQQQSBQQ
SAQQTQQTQQSBQQD
⋅++⋅=
=⋅+⋅+⋅+⋅=
0
1
0
1
0
1
01010101
1
КЛУ1 можно реализовать на логических элементах по полученным
функциям, но можно использовать мультиплексоры. Функция, описывающая
работу четырехвходового мультиплексора выглядит следующим образом:
3
0
1
2
0
1
1
0
1
0
0
1
I
A
A
I
A
A
I
A
A
I
A
A
Y
+
+
+
=
Очевидно, что если подать на адресные входы мультиплексора комби-
нацию
0
1
QQ
, то значение выхода мультиплексора будет определяться усло-
вием перехода, которое подаем на соответствующий информационный вход.
Что касается КЛУ2, то его реализация может быть выполнена анало-
гичным образом как и в примере асинхронного автомата.
5
Асинхронные входы D-триггера подключают к логической единице
(через резистор к источнику питания для ТТЛ(Ш) или напрямую для КМОП).
Возможно использование этих входов для реализации начального пуска ав-
томата. В этом случае в соответствии с исходным состоянием автомата на
асинхронных входах сброса и установки должны формироваться соответст-
вующие уровни.