Лекции - Математическое программирование
Подождите немного. Документ загружается.

МАТЕМАТИЧЕСКОЕ ПРОГРАММИРОВАНИЕ
Развитие относится к 30-ым годам. Математик – Толстой . Бурное развитие после войны.
Всюду, где возникает необходимость выбора среди множества вариантов, решения какой либо
проблемы (получения максимальной прибыли, минимальный расходы и.т.д) , выбор наилучшего
в каком-то смысле – там и возникают задачи математического программирования.
Задачи записанные на языке формул, уравнений представляет собой математическое
моделирование
Найти max или min функции Z=f(
уx,
) , где φ(
уx,
)
b
i
, где (i=1,k); φ(
уx,
)=b
i
, где
(i=1,k) (i=k+1, L);
x
- управляемый параметр.
y
- неуправляемый параметр. (не учитывается)
Чтобы решить задачу имея математическую модель нужно знать математические метод (Гауса,
Крамера, матричный и.т.д) Зная метод => нужно знать алгоритм.
КЛАССИФИКАЦИЯ МЕТОДОВ.
В зависимости от того какими являются функции f и φ
i
, задачи делятся на два класса :
1) Если функции f и φ
i
линейны относительно параметров Х и У , то имеем задачу линейного
программирования. (Л.П.)
2) Если хотя бы одна из функций f и φ
i
нелинейная относительно параметров
x
и
y
, то имеем
нелинейную задачу. (Н.П.)
Для Л.П. существует универсальный способ. Симплекс – метод Основ. разработку дал Дансон.
Х3
Х2
Х1
В Н.П. самым изученным является выпуклое программирование – это когда находится минимум
выпуклой функции на выпуклом множестве или максимум вогнутой функции на выпуклом
множестве. Существуют так же :1) Д.П. – динамическое программирование , вся задача
разбивается на n-этапов. 2) Стохастическое программирование – случайные параметры. 3)
Э.П. – эвристическое программирование , где оптимальное решение найти сложно из-за
большого количества вариантов. 4) Ц.П. – целочисленное программирование.
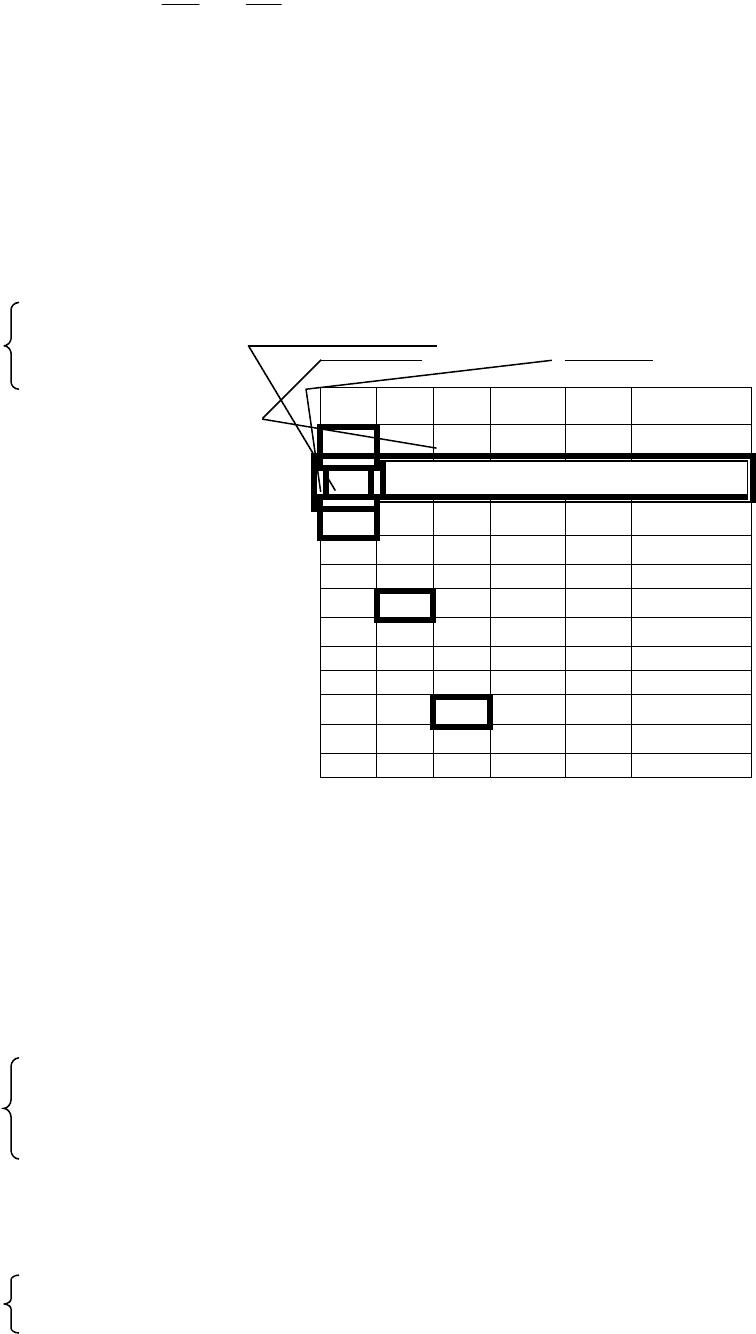
Транспортная задача.
Имеется два пункта однородного продукта. Мощность 1
го
400т.; 2
го
– 500т., имеется 3 пункта
потребления этого продукта. Известны затраты на перевозку 1т. продукции . Из 1
го
пункта к 1
му
– 2млн. р. ; 2
му
– 3 млн. р; 3
му
– 4 млн. р. Из 2
го
- 1
му
– 5 млн. р.;2
му
- 4 млн. р.; 3
му
- 2 млн. р.
Спланировать перевод таким образом, чтобы суммарные затраты были минимальными.
1) нужно 300 т. 2) нужно 400 3) нужно 200 т.
Математическая модель.
Х
ij
– кол-во тонн продукции перевезенной из пункта i к пункту j- му потребителю. Найти план
перевозок. (матрицу Х) Х= х
11
х
12
х
13
Предложение = спросу.
Х
21
х
22
х
23
900 900
Если спрос и предложение совпадают , то имеем закрытую модель, иначе открытая модель. В
закрытом моделирование все выражения равенства.
bj
ai
b1
300
b2
400
b3
200
400
2
x11
3
x12
4
x13
500
5
x21
4
x22
2
x23
b –потребность .
i
a
=
j
b
х
11
+x
12
+x
13
=400
x
21
+x
22
+x
23
=500
1
2 x
11
+x
21
=300
x
12
+x
22
=400
x
13
+x
23
=200
3 x
ij
>=0 (i=
2,1
) (j=
3,1
)
Функция цели 1 Z=2x
11
+3x12+4x13+5x21+4x22+2x23 -> min
1.2.3 математическое моделирование задачи.
Различают другие типы задач :
1) задачи о диете или о рациональном питании.
2) задачи производственного планирования
3) на составление математического моделирования
4) задачи о раскрое
5) задачи о назначениях.
Метод Гауса.
М.Г. вычисляется с помощью таблиц Гауса.
2х1-х2+х3=3
х1+3х2-2х3=1 разрешающий элемнт.
х2+2х3=8 разрешающая строка разреш.столбец.
Х1 Х2 Х3 Св.чл
проверка
2 -1 1 3 5 5
1 3 -2 1 3 3
0 1 2 8 11 11
0 -7 5 1 -1 -1
1 3 -2 1 3 3
0 1 2 8 11 11
0 0 19 57 76 76
1 0 -8 -23 -30 -30
0 1 2 8 11 11
0 0 1 3 4 4
1 0 0 1 2 2
0 1 0 2 3 3
1)разрешающую строку делим на разрешающий элемент. 2) в разрешающем столбце элементы
заменяем на ноли. 3) Все остальные элементы таблицы считаются по правилу прямоугольника.
arsarjaisaijarsa
ij
/*
1
переход от одной формы модели к другой форме модели , различные формы моделей
З.Л.П.
В зависимости от системы ограничения различают в Л.П. три формы модели 1) каноническая 2)
стандартная форма 3) общая форма. Эти три формы эквиваленты между собой в том смысле ,
что от одной формы можно перейти к другой с помощью элементарных преобразований.
Стандартная форма модели З.Л.П. . Система задачи формируется : Найти вектор х,
удовлетворяющий системе ограничений и условию не отрицательности.
а11х1+а12х2+…+а1nxn<=b1
a21x1+a22x2+…+a2nxn<=b2
….
am1x1+am2x2+…+amnxn<=bn
xj>=0 j=1,4; Z=c1x1+c2x2+..+cnxn->max
A-матрица (m*n) Z=cx->max Ax<=b x>=0 ; C=(C1 C2 …Cn) b(b1 b2..bm)
Каноническая тоже самое только в системе ограничений = и Ax=b.
Общая форма. Найти вектор Х, удовлетворяющий системе ограничений
a11x1+a12x2+...+a1nxn=b1
am1x1+amnxn=bm
2
Xj>=0 (j=1,l) l<n Для которого Z=с1х1+cnxn -> max
Для того что бы решать задачи Л.П. симплекс методом необходимо иметь каноническую форму
модели, поэтому необходимо знать , как перейти от одной формы модели к другой .
Переход от стандартной формы к канонической форме.
1) ai1x1+ai2x2+…+ainxn<=bi (2)
ai1x1+ai2x2+..+ainxn+ainxi+n=b xn+i>=0 , i=1,m – балансовые переменные. (1)
Можно доказать, что все решения системы 1 равны решениям неравенства 2 и в этом сысле они
эквивалентны. Функцию цели эти переменные(xn+i) могут быть введены с коэффициентами =0
=> z=c1x1+..+cnxn+oXn+1+..+oxn+m->max
Переход от канонической к стандартной.
Осуществляется двумя способами.
1. а=b (a>=b a<=b) -> a1x1+a2x2=b a1x1+a2x2>=b
a1x1+a2x2<=b
2. Z=c1x1+…+cnxn->max
a11x1+…+a1nxn=b1
a21x1+…+a2nxn=b2
am1x1+…+amnxn=bm (m<n – бесконечно много решений)
1. Приводим к единичному базису методом гауса. Приравняем все свободные переменные к 0,
т.е. xm+1=xm+2=0 то получим первоначальное базисное решение.
2. Выражаем все базисные переменные через свободные.
Х1=b1-a1,m+1xm+1-..-a1,nxn>=0
Xm=bm-am,m+1-…-amnxn>=0
3. В функция цели вместо базисных переменных подставить их через переменные.
Z=c1(b1-..-a1nxn)+c2(b2-..-a2nxn)+cm(bm-..-amnxn)+cm+1xm+1+…+cnxn->max/
Переход от задачи max к min и наоборот.
Во всех формах моделях все сводится к max, но иногда необходимо найти min/
Z=f(x)
min
z1max
z1=f(x)
Чтобы перейти от задачи min к max достаточно поменять знак и ввести новое значение
функции.
Графический метод решения Л.П.
Понятие: допустимого , оптимального , опорного решений, понятие области допустимых
решений.
Вектор Х называется допустимым решением , если он удовлетворяет системе ограничений и
условиям не отрицательности если они есть.
Вектор Х называется оптимальным решением если он является допустимым , а функция цели в
этом решении достигает своего оптимального значения. (max or min)
Опорным решением называется не отрицательное базисное решение системы ограничений.
x1+x3 –x4=1
x2+2x3+4x4=-2
x1 и х2 –базисные неизвестные. Х3,х4 - неизвестные .
Приравняем свободные к 0. , тогда базисные неизвестные получают значения равные х1=1 х2=-2
и получаем базисное решение. Оно является не опорным , т.к. х=-2. Данное решение допустимое
, базисное, не опорное.
Областью допустимых решений называется – совокупность всех допустимых решений
системы.
Геометрическая интерпретация линейного неравенства.
n=2 a1x1+a2x2<=b (n-кол-во переменных , m число неравенств )
Из математики знаем что геометрическим образом уравнение а1х1+а2х2=b – прямая на
плоскости х1 х2 Прямая разбивает плоскость на две полуплоскости . а1х1+а2х2<=b и >= , т.е.
одно из плоскостей является решением. Чтобы определить какая четверть является решением
данного неравенства нужно взять любую точку M и подставить в данное неравенство. И если не
3

равенство удовлетворяется, то точка эта принадлежит той полуплоскости в которая является
решением . И наоборот.
Геометрическая интерпретация системы линейны неравенств.
n=2 . a1x1+a1x2<=b1 ГИСЛН – является пересечение всех полуплоскостей соответству
a2x1+a2x2<=b2 ющих каждому неравенству системы , таким образом нашли ОДР.
am1x1+am2x2<=bm
Возможные случаи ОДР.
1. ОДР является точка.
2. ОДР выпуклый многоугольник.
3. ОДР выпуклая многоугольная область.
4. ОДР – пустая область
Графический метод .
ГМ состоит из двух этапов.
1) ОДР.
2) Среди всех решений необходимо найти такое решение при котором Z достигает своего либо
max или min.
Grad показывает наискорейшее возрастание функции. (С – коэффициент) (линии уровня)
Возможные случаи
1. задача имеет единственное решение.
2. Задача имеет – бесконечно много решений.
3. Задача не имеет решений а) нет ОДР б) в случаи когда zmax - ф-ия не ограниченной сверху
линией уровня и наоборот.
Графический метод можно применять если имеется только две переменные или задача может
быть приведена с помощью эквивалентных преобразований к задаче с двумя переменными.
ОПОРНЫЙ ПЛАН.
Свойства допустимых планов.
1) Выпуклая линейная комбинация точек . х1 х2 …хk сумма вида α1х1+ α2х2+ ...+ αkxk , где
k
1i
αi =1 (αi>=0 αi – коэффициент линейной комбинации).
2) Выпуклым множеством называется такое множество т. Д на плоскости , когда вместе с
любыми двумя точками Х1є Д ; Х2 є Д принадлежащим множеству Д. Ему принадлежит и
их выпуклая Л.К. х=tx1+(1-t)x2 є Д 0<=t<=1
3) Крайняя точка – т.Х выпуклого множества называется крайней если она не может быть
представлена в виде выпуклой Л.К. любых двух точек этого множества (n=2)
Опорное решение – это допустимое базисное решение имеющая не более чем m положительных
элементов , и причем векторы столбца матрицы соответственно положительны координатам
вектора линейны независимы.
Свойства допустимых планов.
Теорема №1
Множество допустимых планов З.Л.П. выпукла если оно не пусто.
Дано: Д- не является пустым множеством – ОДР
Доказать Ж Д- выпуклое множество.
Док-во :
Х1 єД; Х2 єД,то оно удовлетворяет системе ограничений в З.Л.П. Z=cx->max Ax=b X>=0
Ax1=b 0<=t<=1
Ax2=b (1-t) => tAx1+(1-t)Ax2=bt+b(1-t) = A[tx1+(1-t)x2]=b
t>=0
x1; x2>=0 => x>=0
1-t>=0
Ax=b X- решение задачи.
Х = tx1+(1-t)x2 0<=t<=1, согласно опр. Имеем выпуклое множество – Д, т.к. с любыми двумя
точками ему принадлежит и их выпуклая Л.К.
Теорема № 2
Если целевая функция имеет максимум на выпуклом многограннике решений, то это максимум
достигается в вершине многогранника..
Дано: Zmax->X
0
Док-ть X
0-
вершина.
Zmax=C X
0
Док-во: Дан многогранник. А,В,С,Д,Е – вершины. (Док-во проведем от противного)
4

X
0
– не вершина , тогда согласно опр. Крайней точки , X
0
– не крайняя точка , и может быть
представлена в виде выпуклой Л.К. точек хi є ОДР
C X
0
>Cxi (т.к. С X
0
->max)
X
0
=
k
i 1
αiXi
k
i 1
αi=1 αi>=0
Найдем значение функции Z=C X
0
=C
k
i 1
αiXi=
k
i 1
αiCXi<
k
i 1
αiCX
0
=CX
0
k
i 1
αi=CX
0
В каждом слагаемом сменим Xi на Х
0
СХ
0
<CX
0
– противоречие.
Теорема №3
Об альтернативном оптимуме.
Если целвевая функция достигает своего оптимального значения в нескольких вершинах (т)х1
х2 хk , то она достигает оптимального значения в их выпуклой линейной комбинации.
Дано : Док-ть: х=
k
i 1
αiXi
Xi , i:=1,k
k
i 1
αi=1 αi>=0 CX=d
Zmax=C{i=d
Док-во
Найдем Z=СХ=C
k
i 1
αiXi=
k
i 1
αiCXi=
k
i 1
αid=d
k
i 1
αi=d
Теорема № 4
Вектор Х является опорным решением тогда и только тогда , если он является вершиной
многогранника.
Если переменных n>3 то говорят гиперплоскость, положение точек в т – мерном
пространстве.
ИДЕЯ СИМПЛЕКС МЕТОДА.
Симплекс метод является универсальным.
Симплекс метод – аналитический метод.
1. Находятся первоначальное, опорное решение. А)система ограничений должна быть
записана в виде равенств (каноническая форма)
Б)Преобразовать что бы bi >=0 i=1,m
С)Привести систему к единичному базисному виду с неотрицательной правой частью.
Поэтому за разрешающий элемент выбирается строго положительный элемент.
Д)Приравниваем свободные к 0 , получаем первоначальное базисное неотрицательное
решение, которое является опорным решением данной задачи и соответствует вершине.
2. Рассматривая функцию цели выясняем является ли полученное решение оптимальным.
3. Если полученное решение не является оптимальным , то необходимо перейти к следующей
вершине (опорному решению) Переход осуществляется по определенному правилу по
которому : только одна изи базисных переменных должна перейти в свободную и только
одна из свободных перейти в базисную.
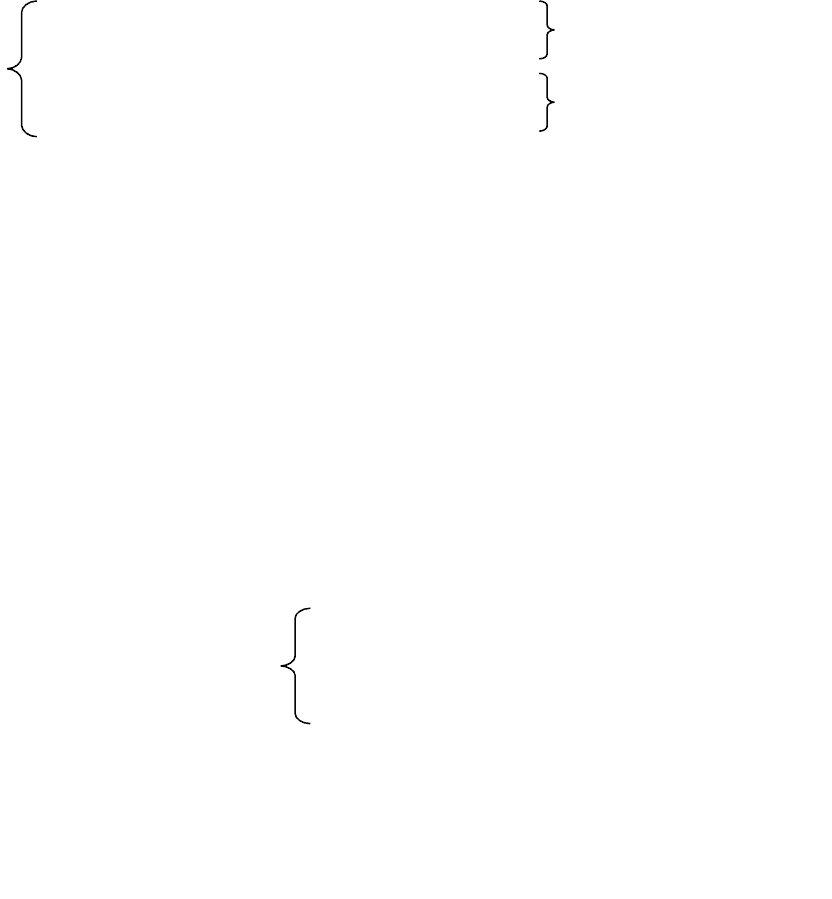
Алгебра симплекс метода.
Х1 Х2 Х3 Х4 Х5 св.чл
1 0 1 6 2 8
0 1 1 0 3 9
0 0 7 -1 -3 -0
1 -2/3 1/3 6 0 2
0 1/3 1/3 0 1 3
0 1 8 -1 0 9
1/6 -2/18 1/18 1 1/3
0 1 -9
1/6 8/9 8 1/8 0 0 1/3
Особенность выделенная клетка.
1) Чтобы решать симплекс методом необходимо Z->min (перейти к min)
5

2) В строке Z записываются коэффициенты ф-ии цели, а свободный член записывается в
выделенную клетку св.чл. с противоположным знаком.
3) Сделаем свободные члены неотрицательными.
4) Приводим систему ограничений к единичному базису методом Гауса, выбирая за
разрешающий элемент положительный элемент.
5) Функция цели должна быть выражена только через свободные неизвестные , чтобы
определить оптимален ли полученный опорный план. Для определения опорного плана
свободные элементы =0 r=(7;-1;-3} Среди них выбираем самый отрицательный и делаем
разрешающий столбец. Для выбора разрешающей строки находится min-ое из отношений
свободных членов системы ограничений к положительным коэффициентам разрешающего
столбца
6) Для выбора разрешающей строки находится min-ое из отношений свободных членов
системы ограничений к положительным коэффициентам разрешающего столбца.
Альтернативный оптимум.
Предположим найдено оптимальное решение. r>=0. Признаком альтернативного оптимума в
этом случаи является равенство 0, хотя бы одной из компонент вектора r. Покажем что если
компонента rj =0 , для найденого оптимального плана (Х
*
1
) то можно найти еще одно
оптимальное решение Х
*
2
, значение в котором будет таким же как и значение в Х
*
1
. Z(Х
*
2
)= Z
(Х
*
1)
=Zmin
За разрешающий столбец берем rj =0 Zmin=Z(X
*
1
)=-Q (свободный член в Z) Q
1
=aij*Q-bi*rj/aij =
Q-(bi*rj/aij)=Q bi>0 aij>=0
Сделав шаг метода Гауса , получим новое решение , а значение функции в т Х
*
2
будет точно
таким же как и в Х
*
2
– т.е. задача Альтернативного оптимума.
Монотонность и конечность алгоритма симплекс метода.
Покажем , что применяя алгоритм симплекс метода к З.Л.П. мы получим , что значение
функции монотонно убывает. Предположим, что на кокаком то шаге симплекс метода выбран
разрешающий столбец rj<0 , а за разрешающую строку выбрана i строка. Покажем что значение
функции не возрастает , если мы применим один шаг симплекс метода. Qнов=aij*Q-bi*rj/aij=
Q-bi-rj/aij<=0 (bi>=0 rj<0 aij>=0) Qнов>=Q -Qнов<=-Q
Так как многогранник имеет конечное число вершин , то алгоритм симплекс метода будет
конечен.
Проблема выражденности.
Если получено в опорном плане число положительных координат меньше чем m , то решение
является выражденным , и если полученный план не является оптимальным , т.е. возникает
необходимость к новому опорному плану и при этом за разрешающую строку выбирается
строка в которой bi=0 Тогда моежт быть проблема зацикливания, т.е. возврат к прежней
вершине , для того чтобы избежать этого нужно «расклеить» точки для чего служит ипсилон
метод. На ипсилон величину сдвигают прямые , таким образом чтобы раздвигаются вершины.
Находят оптимальное решение новой задачи и учитывая ипсилон переходя к страой задаче.
Если в конце преобразований получена таблица , то столбец соответсвующем столбце нет ни
одного положительного элемента то Zmin->- бесконечности ( нет решения)
Если в результате преобразований сстрока превратилась ( 0 0 0 0 = 7), то задача не имеет
решения по причине не совместимости систем . Нет ОДР.
Если оптимальное решение и соответствующий ему вектор (r) имеет 0 координату то задача
на альтернативный оптимум. Что бы найти второе решение берем за разрешающий столбец 0.
Метод искусственного базиса.
Z=CX->min В данной задаче нет естественного базиса. Введем в каждое ограничение
Ax=b искусственную переменную «у»>=0 Z преобразуем в T. М – полож. большое чис
X>=0 -Z задача.
Ах+у=b
Х>=0 у>=0
T=CX+M*y->min (М –задача)
Теорема . Если М задача имеет оптимальное решение , то Z – задача : а) тоже имеет решение ,
если все искусственные переменные = 0. Б) Z- задача не имеет решения если хотя бы одна из
искусственных переменных не равна 0, систем ограничений будет не совместна. Если М задача
не имеет решения ,т.е. Tmin ->-бесконечности , то и Z- задача тоже не имеет решения.
6

ТЕОРИЯ ДВОЙСТВЕННОСТИ .
Каждой задаче Л.П. можно поставить в соответствие двойственную задачу , решения которой
дает немедленное решение прямой задачи.
Стандартная форма.
Z=CX->max
Ax<=b
x>=0 1)
Двойственной задачей к данной З.Л.П. называется задача вида
w=yb->min
YA>=C
Y>=0 2)
Задача 1) и 2) называется пара двойственных задач.
Если по этим правилам построить двойственную задачу к 2) то получим 1) . И в этом смысле
задачи называются взаимозаменяемыми или сопряженными.
(y- строка)
(y1,y2..ym) a11
a21
am1
Экономический смысл : Экономически двойственную и прямую задачу можно интерпретировать
прямая на max прибыль. , при выпуске х1 х2 х3 , а двойственную min -> расходов на ресурсы.
1) b – сырье ; у1 у2 – оценка ресурсов.
Правило построения двойственных задач к общей З.Л.П.
1. Количество переменных в двойственной задаче равно количеству ограничений в прямой
задаче.
2. Количество ограничений двойственной задачи равно числу переменных в прямой задачи.
3. Вектор свободных элементов прямой задачи b является вектором коэффициентов
двойственной задачи.
4. Вектор коэффициентов функции цели C=(C1…Cn) прямой задачи служит вектором
свободных членов системы ограничений двойственной задачи.
5. Если прямой Z->max то в Д.З. W->min/
6. Каждому ограничению – неравенству ai1x1+a12x2+..+ainxm , i=1,m Соответствует
неотрицательная переменная yi>=0 ; i=1,m Д.З.
7. Каждой неотрицательной переменной (xj>=0) j=1,n прямой задачи соответствует
ограничения неравенства Д.З. a1jy1+a2jy2+…+amjym>=Cj (j=1,n)
8. Матрица системы ограничений Д.З. служит транспонированная матрица прямой задачи.
9. Каждом ограничению равенству прямой задачи ai1x1+ai2x2+…+ainxn=bi (i=1,m)
соответствует свободная переменная yi><0
10. Каждой свободной переменной xj><0 (j=1,n) соответствует ограничение равенства a1j+a2j+
…+amjym=Cj
ТЕОРЕМА ДВОЙСТВЕННОСТИ.
1. Если прямая и двойственная задача имеют допустимые решения Х и У , то они имеют
оптимальное решение Х
*
и У
*
и причем значение функции в этих точках совпадают.
Zmax=Wmin CX
*
=Y
*
b
Лемма №1
Для любых двух допустимых решений Х и У пары Д.З. справедливо СХ<=Уb
Док-во:
Z=CX->max W=yb->min
Ax<=b YA>=C
x>=0 y>=0
Допустим что X
1
– любое допустимое решение П.З. , а Y
1
– для Д.З.
Тогда Х
1
удовлетворяет системе ограничений , т.е. АХ
1
<=b ¦ y
1
>=0 Y
1
A>=C¦x
1
>=0
Первое ограничение умножим на y
1
Y
1
Ax
1
<=y
1
b
Y
1
Ax
1
>=Cx
1
Cx
1
<=T<=y
1
b => Cx
1
<=y
1
b
Лемма № 2
Если для допустимых решений X
*
и У
*
, выполняется условие равенства СХ
*
=У
*
b , то Х
*
и У
*
являются оптимальными решениями пары двойственных задач.
7

Док-во : Дана пара Д.З. Х
*
и У
*
допустимые решения. СХ
*
=У
*
b , док-ть Х
*
и У
*
оптим. решение
Предположим что Х- ОДР (любое) , тогда по первой лемме СХ<=У
*
b , но У
*
b=Cx
*
=> Cx=Cx
*
отсюда следует , что Х
*
т. максимума => у
*
т. минимума.
На основании графического анализа Д.З. исследовать разрешимость данной задачи в случаи
разрешимости – найти экстремальные значение целевой функции.
2 часть теоремы.
Если одна из задач не разрешима из-за не ограниченности функции , то и вторая задача не
имеет решения по причине не совместимости систем ограничений.
Док-во :
Согласно первой лемме СХ<=уb , если прямая задача не имеет решения zmax->бесконечности ,
то, очевидно, что нет такого допустимого решения (у) в котором значение функции было бы
больше бесконечности.
ВТОРАЯ ТЕОРЕМА ДВОЙСТВЕННОСТИ И СВОЙСТВА ДВОЙСТВЕННЫХ ОЦЕНОК.
Z=CX->max W=yb->min
Ax>=b ¦ y1 A- матрица коэффициентов
x>=0 ¦ y>=0 y1>=c
теорема : Для того что бы допустимое решение Х
*
и У
*
пары двойственных задач были
оптимальными , необходимо и достаточно , что бы для них выполнялись условия
«дополнительное не жесткости»
Z=Cx->max W=yb->min
Ax<=b ¦y YA>=C ¦x
x>=0 y>=0
1. Y*(Ax*-b)=0 (тогда оптимальное решение)
2. (У*А-С)Х*=0
необходимость :
Х* У* - оптимальное решение.
Док-ть: 1 и 2
Док-во: т.к. Х* является оптимальным решением , то и я является допустимым решением =>
Ах*<=b¦y*>=0 Y*Ax*<=y*b; y* в ходит ОДР => Y*A>=C¦x*>=0 y*Ax*>=Cx* =>
Cx*<=Y*Ax*<=y*b, т.к. х* и у* - оптимальное решение , то Сх*=уb* , по первой теореме =>
Сх*=у*Ах*=у*b. Ч.т.д
(С-у*А)х*=0
2) (у*А-С)х*=0
1) у*(Ах*-b)=0
достаточность
Дано
1) 2)
Док-ть
Х* и У* - оптим. решение.
Док-во: у*Ах*-у*b=0
Y*Ax*=y*b
y*Ax*-Cx=0
yAx*=Cx*
Cx*=T=y*b=> Cx*=y*b
Вывод для практики : Если в оптимальном решении исходной задачи х*j ><0 , то
соответствующее ограничение Д.З. превращается в оптимальное решение равенства. Если какое
либо из ограничений исходной задачи в оптимальном решении превращается в строгое не
равенство , то соответствующая переменная Д.З=0
Свойства двойственных оценок.
В экономике вектор у, называется вектором двойственных оценок или «теневыми ценами».
Двойственные оценки сырья и т.д.
Свойства:
1) y*i – является покупателем дефицитности i-го ресурса (i=1,m) Оценка не дефицитного
ресурса –0 (y*=0) , если
n
j 1
аijxj<bi Чем выше yi (оценка ресурса), тем ресурс дефицитнее.
2) Y*i=dzmax/dbi y*i=lim ▲Zmax/▲bi (bi->0) => y*i≈▲Zmax/▲bi => Zmax=y*i*▲bi
8
3) Вектор y*i – является показателем необходимости введения в производство j- технологии
Х*j(
m
i 1
aijy*i-Cj)=0 , если
m
i 1
aijy*i>Cj, то выгодно (Cj- цена ед. продукции) =>Х*j=0 ,
то не надо выпускать продукцию Х*j>0 , то затраты совпадают с доходами .
4) Вектор У является показателем сопоставимости затрат на ресурсы (у*1b1+y*2b2..) со
стоимостью продукции.
ТРАНСПОРТНАЯ ЗАДАЧА.
Дадим постановку транспортной задачи в общем виде.
Пусть имеется m- пунктов производства однородного продукта, мощности каждого пункта
соответственно = а1 а2 а3 … аь(столбец) , имеется n- пунктов потребления данной продукции.
Потребности которых составляют соответственно b1 b2 bn (строка) Известны затраты на
перевозки единицы продукции из i-го пункта j- потребителю, которые составляют Сij денежных
единиц. Требуется спланировать перевозки таким образом что бы суммарные затраты были
минимальными.
Математическая модель. Матрица С – матрица затрат. Обозначим через Xij кол-во единиц
продукции от i-ог производителя j-потребителю. =>матрица m*n где последний элемент Xmn/
из условия Xij>=0 3)
Предположим что српос = предложению т.е. сумма всех аi= сумме всех bj
х11+х12+…+х1n =a1
x21+x22+…+x2n =a2 m
2) xm1+xm2+…+xmn = am
x11+ x21 +xm1 = b1
x12+ x22+ xm2 = b2 n
x1n+ x2n+ +xmn=bn
1) Z=C11X11+C12X12+…+CmnXmn->min
Бывают задачи типа закрытого и открытого.
А) предположим что спрос >предложения , т.е. сумма ai< суммы bj . Тогда что бы перейти к
закрытой задачи вводят фиктивного производителя мощность которого равно am+1=
bj
ai
а в транспортно таблице вводится новая строка m+1 в которой am+1=
bj
ai
,а затраты = 0 (Cm+1,j=0)
Б) Если
ai
>
bj
, т.е. предложение выше чем спрос. Вводят фиктивного потребителя
bn+1=
ai
-
bj
, а в таблице добавляем фиктивный столбец с затратами =0
Очевидно что Т.З. является Л.П., то можно решить симплекс методом., но таблица которая
будет состоять к примеру из 100 столбцов – считать не удобно , то используют такие методы как
: распределительный метод, метод дифференциальных рент, метод потенциалов.
Особенности Т.З.
1) Все ограничения равенства ( в закрытой)
2) Все переменные входят в систему ограничений, входят в систему либо 0 или 1
3) Каждая переменная входит в С.О. только два раза.
4) Теорема о существовании решения.
Т.З. всегда имеет оптимальное решение если сумма ai= сумме bj.
Док-во: Z=
m
i
n
j1 1
CijXij->min
n
j
xij
1
=ai (i=1,m)
m
i
xij
1
=bj (j=1,n) Xij>=0
Очевидно что решением будет Хij = aibj/
ai
=aibj/
bj
Просуммируем по i:
m
i
xij
1
=
m
i 1
aibj/
m
i 1
ai = bj
m
i 1
ai/
m
i 1
ai = bj
Про суммируем по j :
m
i
xij
1
= ai Xij=min(ai;bj)
ТЕОРЕМА О РАНГЕ МАТРИЦЫ.
9

Ранг матрицы системы ограничений = m+n-1
х11+х12+…+х1n =a1
x21+x22+…+x2n =a2 m
2) xm1+xm2+…+xmn = am
x11+ x21 +xm1 = b1
x12+ x22+ xm2 = b2 n
x1n+ x2n+ +xmn=bn
Докажем что ранг матрицы (А)<m+n
А1=(1,1,1,0…0000…000) (коэффициенты первого уравнения размерность m*n)
А2=(0000,1111,0000000)
А1+А2+…+Аm=(111111111111)
Am+1
Am+2 A1+A2+…+Am=Am+1+Am+2+…+Am+n => Векторы линейно зависимые => уравнения
Am+n системы линейно зависимые между
собой , а раз они линейно зависимые , то r(A)<m+n
Докажем что ранг = m+n-1
Ранг – наивысший порядок минора отличный от 0.
1) Построим матрицу А из (1 и 0) размерность m*n , найдем минор нужного порядка n-1
вычеркиваем одну из строк. Минор будет равен 1, отличен от 0.
Из этого следует что число базисных неизвестных в Т.З. = m+n-1 , а остальные переменные
будут свободными. Ч.Т.Д.
Матрица Х=¦Хij¦ , называется допустимым решением Т.З. или допустимым планом , если она
удовлетворяет системе ограничений и условиям не отрицательности. Допустимый план
называется оптимальным , если Z при этом плане принимает свое минимальное значение.
Этапы решения Т.З.
1) Находят первоначальный опорный план , либо методом северо-западного угла , либо
методом минимального элемента.
2) Согласно т. о потенциальности плана (оптимальности плана) проверяют полученный план
на оптимальность если он оптимален , то записывают ответ X* и Zmin=
3) Если полученный план не оптимален переходят к новому опорному плану.
Метод нахождения первоначального опорного плана.
1) северо-западного угла.
Х11=min(ai;bj) Клетка становится занятой – базисной. Если удовлетворен покупатель то столбец
закрывается, если все со склада вывезли то закрывается строка. И.т.д.
Если баланс по строкам и столбцам выполняется и число клеток (занятых) совпадает с рангом
матрицы то получаем допустимый план. Но данный опорный план может быть далеким от
оптимального, потому что не берутся в расчет расходы. Поэтому используют для этого метод
минимального элемента.
Если в середине таблицы одновременно закрывается строка и столбец , а число занятых клеток
не равно рангу, то в следующую клетку ставят 0 базисный и клетка считается занятой ->
выражденной решение.
Переход от одного опорного плана к другому.
Необходимо перейти к другому опорному решению, т.е. одну из базисных переменных сделать
свободной , а одну из свободных занять, так же как и симплекс метод. Для перехода
используют замкнутую ломаную линию. Цикл 0 замкнутая ломаная линия вершины которой
лежат в клетках а звенья лежат в строках и столбцах. Это ломаная должна быть связной в том
смысле что в каждой вершине встречаются только два звена. Циклы могут быть
самопересекающимися , при чем т. пересечения не является вершиной.
Цикл пересчета - называется цикл, одна вершина которого лежит в свободной клетке , а
остальные в занятой. При переходе от одного плана к другому используются только циклы
пересчета. λ>=0 λmin(xij) – i,j нечетные клетки цикла пересчета. Если в цикле пересчета в
нескольких клетках разность будет равно 0 , то пишут базисный 0.
Проверка плана на оптимальность.
Теорема об оптимальности плана или теорема о потенциальности плана.
Для док-ва составим двойственную к прямой задаче.
Z=
m
i
n
j1 1
Cijxij->min
10