Курсовой проект - Транспортная задача по критериям времени и стоимости. Вариант 3.5
Подождите немного. Документ загружается.

6. Листинг фрагмента программы, реализующего алгоритм решения
задачи
module Prog where
import GHC.Ptr
import Maybe
import BaseOperations
import Foreign.C
import Foreign.Marshal.Array
foreign export ccall "getplan" getPlan :: CInt → CInt → CInt → Ptr CInt → IO
(Ptr CFloat)
getPlan :: CInt → CInt → CInt → Ptr CInt → IO (Ptr CFloat)
getPlan rC cC eC ptr
= do
aData ← peekArray (fromIntegral eC) ptr
let rCount = fromIntegral rC
cCount = fromIntegral cC
cData = map fromIntegral aData
a = take rCount cData
b = take cCount ◊ drop rCount cData
tT = take (rCount*cCount) ◊ drop (rCount+cCount) cData
cT = drop (rCount*cCount+rCount+cCount) cData
t = [[ tT !! (i*cCount + j) |
j ← [0 cCount-1] ] | ‥
i ← [0 rCount-1] ] ‥
c = [[ cT !! (i*cCount + j) |
j ← [0 cCount-1] ] | ‥
i ← [0 rCount-1] ] ‥
-- Проверка баланса и добавление фиктивного пункта
mx = checkForClosing a b
aV = getAddedVector a b
mColCount = if aV ≡ 2
then (cCount + 1)
else cCount
mRowCount = if aV ≡ 1
then (rCount + 1)
else rCount
-- Строим опорнный план
basePlan = northWesternCorner (fst mx) (snd mx) 1
prd = 2 * sum [ t !! i !! j | i ← [0 rCount-1], j ← [0 cCount-1]] ‥ ‥
maxi = maximum [ t !! i !! j |
i ← [0 rCount-1], j ← [0 cCount-1], (basePlan !! (i*cCount + j))‥ ‥
≠ 0]
-- Избавляемся от вырожденности.
lNDPlan = makeNonDegeneratePlan basePlan mColCount
-- Находим оптимальный план по критерию времени.
ans = addConditions lNDPlan t mRowCount mColCount rCount cCount aV maxi
[]
optimPlan = last ◊ fst ◊ fst ◊ last ◊ init ans
-- Находим максимальноое время перевозки
maxT = maximum [ t !! ((fst ◊ fst el) - 1) !! ((snd ◊ fst el) - 1)|
el ← optimPlan,
(snd el ≥ 0.9) &&
(((aV ≡ 1 ) ((fst ◊ fst el) ≠ mRowCount)) || ∧
((aV ≡ 2 ) ((snd ◊ fst el) ≠ mColCount)) || ∧
(aV ≡ 3 )) ]
cM = 2 * sum [ c !! i !! j | i ← [0 rCount-1], j ← [0 cCount-1]] ‥ ‥
-- Блокируем
c1 = [[(case aV of
1 → if i ≡ mRowCount - 1
then cM
else (if (t !! i !! j) > maxT
11
then cM
else c !! i !! j)
2 → if j ≡ mColCount - 1
then cM
else (if (t !! i !! j) > maxT
then cM
else (c !! i !! j))
3 → (if (t !! i !! j) > maxT
then cM
else (c !! i !! j))) |
j ← [0 mColCount-1] ] | ‥
i ← [0 mRowCount-1] ] ‥
nonDPlan = listToArrayList lNDPlan mColCount
-- Потенциалы и оценочная матрица
rt = potentials c1 (map snd optimPlan) ([(0,0)],[])
c0 = [[ (c1 !! i !! j) - ((fromJust ◊ lookup j ◊ snd rt) - (fromJust ◊
lookup i ◊ fst rt)) |
j ← [0 mColCount-1] ] | ‥
i ← [0 mRowCount-1] ] ‥
fstSum = sum ◊ zipWith (*) (mkNonClsdPlan optimPlan mColCount aV) ◊
concat c
-- Находим план, дооптимизированный по стоимости.
pl = if null [ minimum i | i ← c0, (minimum i) < 0 ]
then (([optimPlan,optimPlan], [c1,c0]),([maxT,maxT],[fstSum,fstSum])
)
else
let newStepsPlan = fst ◊ mkNewPlan c0 optimPlan mRowCount mColCount
sndSum = sum ◊ zipWith (*) (mkNonClsdPlan newStepsPlan mColCount
aV) ◊ concat c
maximm = maximum [ t !! i !! j |
i ← [0 rCount-1], j ← [0 cCount-1], ‥ ‥
(snd (newStepsPlan !! (i*cCount + j))) ≠ 0]
in (potentialsMethod t (mkNonClsdPlan2 c1 aV) ([maxT,maxT,maximm],
[fstSum,sndSum,sndSum])
mColCount aV False [optimPlan,optimPlan,newStepsPlan]
[c1,c0])
parameters = [mRowCount, mColCount, 1 + length ans] [ length ◊ fst ◊⊕
fst el | el ← ans ]
[fromIntegral ◊ length ◊ fst ◊ fst pl] ⊕
pr ← newArray ([ fromIntegral i | i ← parameters ]
(concat [[ fromRational ◊ toRational el | ⊕
el ← map snd (concat ◊ fst ◊ fst et)] ++
(map fromIntegral ◊ concat ◊ concat ◊ snd ◊ fst et) |
et ← ans])
( [ fromRational ◊ toRational el | ⊕
el ← map snd (concat ◊ fst ◊ fst pl)] ++
(map fromIntegral ◊ concat ◊ concat ◊ snd ◊ fst pl))
---et ← ans])
(map fromIntegral ◊ concat [fst ◊ snd et | et ← ans]) ⊕
(map fromIntegral ◊ concat [snd ◊ snd et | et ← ans]) ⊕
(map fromIntegral ◊ fst ◊ snd pl) ⊕
(map fromIntegral ◊ snd ◊ snd pl)) ⊕
return pr
module BaseOperations where
import List
import Maybe
type Plan = [((Int, Int), Float)]
type Ansset = (([Plan],[[[Int]]]),([Int],[Int]))
addConditions :: [Float] → [[Int]] → Int → Int → Int → Int → Int → Int →
[Ansset] → [Ansset]
addConditions plan t mRC mCC rC cC aV maxi dec = (
12
-- blok - Значение, которым будем блокировать перевозки.
let blok = 5 * sum [ t !! i !! j | i ← [0 rC-1], j ← [0 cC-1]] ‥ ‥
-- Блокируем в матрице временных затрат те элементы,
-- которые больше максимального времени перевозок, соответсвующего
опорному плану, или равны ему.
tBl = [[(case aV of
1 → (if (i ≡ mRC - 1) ((t !! i !! j) ≥ maxi) ∨
then blok
else t !! i !! j)
2 → (if (j ≡ mCC - 1) ((t !! i !! j) ≥ maxi) ∨
then blok
else (t !! i !! j))
3 → (if (t !! i !! j) ≥ maxi
then blok
else (t !! i !! j))) |
j ← [0 mCC-1] ] | ‥
i ← [0 mRC-1] ] ‥
--sumNew = sum ◊ zipWith (*) (map round plan) ◊ concat t
nonClosedModelTime = (case aV of
1 → listToArrayList (concat ◊ init tBl) mCC
2 → listToArrayList (concat ◊ [ init i | i ← tBl ]) (mCC-1)
3 → listToArrayList (concat ◊ tBl) mCC)
nonDPlan = listToArrayList plan mCC
-- Вычисляем потенциалы
pts = potentials tBl plan ([(0,0)],[])
-- Рассчитываем матрицу T1
t1 = [[ (tBl !! i !! j) - ((fromJust ◊ lookup j ◊ snd pts) - (fromJust
◊ lookup i ◊ fst pts)) |
j ← [0 mCC-1] ] | ‥
i ← [0 mRC-1] ] ‥
fstSum = sum ◊ zipWith (*) (mkNonClsdPlan nonDPlan mCC aV) ◊ concat t
-- Проверяем на наличие отрицательных элементов в T1
in if null [ minimum i | i ← t1, (minimum i) < 0 ]
then
-- Если нету, то выдаем ответ.
if null dec
then [(([nonDPlan,nonDPlan], [tBl,t1]), ([maxi,maxi],[fstSum,fstSum]))]
else dec {-++ [([nonDPlan], [t1 [[maxi]]])]-} ⊕
-- Иначе строим новый, улучшенный план.
else (let newStepsPlan = fst ◊ mkNewPlan t1 nonDPlan mRC mCC
-- После предварительного этапа и первой итерации приступаем к следующим
итеррациям и находим
-- оптимальный план при данных условиях.
planT = mkNonClsdPlan newStepsPlan mCC aV
maximm = maximum [ t !! i !! j |
i ← [0 rC-1], j ← [0 cC-1], (planT !! (i*cC + j)) ≠ 0] ‥ ‥
sndSum = sum ◊ zipWith (*) (mkNonClsdPlan newStepsPlan mCC aV) ◊
concat ◊ mkNonClsdPlan2 tBl aV
decision = potentialsMethod (mkNonClsdPlan2 tBl aV) []
([maxi,maxi,maximm],[fstSum,fstSum,sndSum]) mCC aV True
[nonDPlan, nonDPlan, newStepsPlan] [tBl, t1]
pl = last ◊ fst ◊ fst decision
-- Убираем из оптимального плана добавленную при переходе к закрытой модели
строку или столбец,
-- если модель была открытой.
newPlan = mkNonClsdPlan pl mCC aV
newPlan1 = mkNonClsdPlan1 pl mCC aV
in if or
[(fst el) `elem` (map fst ◊ filter ( λa → snd a≥ 0.9) newPlan1) |
el ← (filter (λa → snd a > (blok `div` 2)) nonClosedModelTime) ]
then dec [decision] ⊕
else addConditions plan t mRC mCC rC cC aV
(maximum [ t !! i !! j |
i ← [0 rC-1], j ← [0 cC-1], newPlan !! (i*cC + j) > 0 ]) ‥ ‥
(dec [decision]))) ⊕
mkNonClsdPlan :: Plan → Int → Int → [Int]
mkNonClsdPlan plan mCC addV =
13
let mRC = (length plan) `div` mCC
in (case addV of
1 → map (round snd) ◊ take ((mRC-1)*mCC) plan ∘
2 → map (round snd) ◊ concat [ init ◊ drop ((i-1)*mCC) ◊ take∘
(i*mCC) plan | i ← [1 mRC] ] ‥
3 → map (round snd) plan) ∘
mkNonClsdPlan2 :: [[a]] → Int → [[a]]
mkNonClsdPlan2 plan addV =
(case addV of
1 → init plan
2 → map init plan
3 → plan)
mkNonClsdPlan1 :: [a] → Int → Int → [a]
mkNonClsdPlan1 plan mCC addV =
let mRC = (length plan) `div` mCC
in (case addV of
1 → take ((mRC-1)*mCC) plan
2 → concat [ init ◊ drop ((i-1)*mCC) ◊ take (i*mCC) plan | i ← [1‥
mRC] ]
3 → plan)
mkNewPlan :: [[Int]] → Plan → Int → Int → (Plan, Int)
mkNewPlan t1 nonDPlan mRC mCC =
let minEl = minimum [ minimum i | i ← t1, (minimum i) < 0 ]
rowOfMinEl = head [ i |
i ← [1 length t1], ‥
(findIndex (≡ minEl) (t1 !! (i-1))) ≠ Nothing ]
colOfMinEl = 1 + fromJust (findIndex (≡ minEl) (t1 !!
(rowOfMinEl-1)))
-- Далее находим подматрицу в опорном плане, содержащую цикл, и число
колонок в этой подматрице.
mCycle = findCycle rowOfMinEl colOfMinEl mCC 1 nonDPlan
mCol = length ◊ filter (≡(fst ◊ fst ◊ head mCycle)) ◊ map
(fst fst) mCycle ∘
-- Находим номер нулевого элемента плана, который соотетствует минимальному
отрицательному марицы T1
indexX = fromJust ◊ findIndex (≡((rowOfMinEl, colOfMinEl), 0.0))
mCycle
-- Составляем цикл
cy = getCycle ((indexX `div` mCol)+1) ((indexX `mod` mCol)+1)
mCol mCycle
-- Находим минимальный нечетный элемент
cymin = minimum [ snd (cy !! (i-1)) | i ← [1 length cy], even ‥
i]
-- Отнимаем его из нечётных, и прибавляем к чsum ◊ zipWith (*) plan ◊
concat tbaseётным
tempCycle = [ if even i
then (fst (cy !! (i-1)), snd (cy !! (i-1)) - cymin)
else (fst (cy !! (i-1)), snd (cy !! (i-1)) + cymin) | i ←
[1 length cy] ] ‥
-- Находим в преобразованном цикле нулевые элементы
zeroMass = [ fst ◊ (tempCycle !! (i-1)) |
i ← [1 length tempCycle], ‥
(even i) (snd (tempCycle !! (i-1)) ≡ 0) ] ∧
-- Если число нулевых елементов больше 1, то заменяем все , кроме одного, на
0.0001
modifiedCycle = if (length zeroMass) > 1
then [ if(findIndex (≡(fst (tempCycle !! (i-1)))) ◊ tail
zeroMass) ≠ Nothing
then ((fst (tempCycle !! (i-1))), 0.000001)
else tempCycle !! (i-1) | i ← [1 length tempCycle]] ‥
else tempCycle
-- Записываем полученную цепочку в матрицу опроного плана вместо
первоначальных значений.
in ([ (if (lookup (i+1,j+1) modifiedCycle) ≠ Nothing
14
then ((i+1,j+1), fromJust (lookup (i+1,j+1) modifiedCycle))
else (nonDPlan !! (i*mCC + j))) |
i ← [0 mRC-1], j ← [0 mCC-1] ], minEl * round ‥ ‥
cymin)
potentialsMethod :: [[Int]] → [[Int]] → ([Int],[Int]) → Int → Int → Bool →
[Plan] → [[[Int]]] → Ansset
potentialsMethod tbase cbase sm colCount aV byTime x1 t1 =
let x = last x1
t = last t1
significantIndices = [ fst i |
i ← x,
(snd i ≠ 0) ((t !! ((fst ◊ fst i)-1) !! ((snd ◊ fst i)-1)) ≡ 0) ] ∧
minEl = minimum [ minimum i | i ← t ]
rowOfMinEl = head [ i |
i ← [1 length t], ‥
(findIndex (≡ minEl) (t !! (i-1))) ≠ Nothing ]
newT = processMarkedRnC
(getMarkedRowsNColoumns [(1, rowOfMinEl)] significantIndices)
minEl
t
rowCount = (length x) `div` colCount
in if null [filter (<0) i | i ← newT, ¬ (null (filter (<0) i)) ]
then ((x1, t1 [newT]), sm) ⊕
else let newX = mkNewPlan newT x rowCount colCount
plan = mkNonClsdPlan (fst newX) colCount aV
calcMax = maximum [ tbase !! i !! j |
i ← [0 (length tbase)-1], j ← [0 (length ◊ head ‥ ‥
tbase)-1],
(plan !! (i*(length ◊ head tbase) + j)) ≠ 0]
calcSum = if byTime
then sum ◊ zipWith (*) plan ◊ concat tbase
else sum ◊ zipWith (*) plan ◊ concat cbase
in if(calcSum ≡ (last ◊ snd sm) + (snd newX))
then potentialsMethod tbase cbase
((fst sm) [calcMax],(snd sm) [calcSum]) ⊕ ⊕
colCount aV byTime (x1 [fst ◊ newX]) (t1 [newT]) ⊕ ⊕
else error ("potentialsMethod: error!! " (show ◊ length x1)) ⊕
-- | Функция прибавляет модуль минимального отрицательного элемента ко всем
строкам
-- и отнимает из столбцов матрицы Ti
processMarkedRnC :: [(Int, Int)] → Int → [[Int]] → [[Int]]
processMarkedRnC indices mint t =
let isRow = fst ◊ head indices
vecNumber = snd ◊ head indices
in if null indices
then t
else if isRow ≡ 1
then processMarkedRnC (tail indices) mint
[ if i ≡ vecNumber
then map (+(- mint)) (t !! (i-1))
else t !! (i-1) |
i ← [1 length t] ] ‥
else processMarkedRnC (tail indices) mint
[[ if j ≡ vecNumber
then (t !! (i-1) !! (j-1)) + mint
else (t !! (i-1) !! (j-1))
| j ← [1 length ◊ head t] ] | ‥
i ← [1 length t] ] ‥
-- | Функция ищет по списку индексов существенных нулей те строки и столбцы, к
элементам
-- которых нужно соотвеветсвенно добавить или отнять модуль минимального
-- отрицательного элемента матрицы времени (стоимости).
getMarkedRowsNColoumns :: [(Int,Int)] → [(Int,Int)] → [(Int,Int)]
15
getMarkedRowsNColoumns indices arr =
let indicesGroup = last ◊ groupBy (λa b → (fst a ≡ fst b)) indices
newEl = if (fst ◊ head indicesGroup) ≡ 1
then [ (2, snd j) |
i ← indicesGroup,
j ← arr,
(snd i ≡ fst j) ¬ ((2, snd j) `elem` indices) ] ∧
else [ (1, fst j) |
i ← indicesGroup,
j ← arr,
(snd i ≡ snd j) ¬ ((1, fst j) `elem` indices) ] ∧
in if null newEl
then indices
else getMarkedRowsNColoumns (indices newEl) arr ⊕
-- | Фукнция находит в плане X подматрицу, которая содержит цикл.
findCycle :: Int → Int → Int → Int → Plan → Plan
findCycle i j colCount counter plan
| colCount < 1 = []
| counter > (colCount + (length plan) `div` colCount) = plan
| otherwise =
let rowCount = (length plan) `div` colCount
rowMass = [ fst ◊ fst ◊ (plan !! (n*colCount)) |
n ← [0 rowCount-1] ] ‥
colMass = map (snd fst) ◊ drop ((rowCount - 1) * colCount) plan ∘
in (if counter ≤ rowCount
then
-- Образуем список из ненулевых элементов текущей строки, и
проверяем его длину.
(if (length [ plan !! ((counter-1)*colCount + m) |
m ← [0 colCount-1], ‥
let curRow = rowMass !! (counter-1),
let curCol = colMass !! m,
((fromJust ◊ lookup (curRow, curCol) plan) ≠ 0) ||
((curRow ≡ i ) (curCol ≡ j))]) > 1 ∧
then findCycle i j colCount (counter + 1) plan
-- Если в строке не больше одного ненулевего элемента, то
удаляем строку.
else findCycle i j colCount 1 [ plan !! ((n-1)*colCount + (m-1))
|
n ← [1 rowCount], ‥
m ← [1 colCount], ‥
n ≠ counter])
else
-- Образуем список из ненулевых элементов текущего столбца, и
проверяем его длину.
(if (length [ plan !! (n*colCount + (counter - rowCount) - 1)
|
n ← [0 rowCount-1], ‥
let curRow = rowMass !! n,
let curCol = colMass !! (counter - rowCount - 1) ,
((fromJust ◊ lookup (curRow, curCol) plan) ≠ 0) ||
((curRow ≡ i) (curCol ≡ j))]) > 1 ∧
then findCycle i j colCount (counter + 1) plan
-- Если в солбце не больше одного ненулевего элемента, то
удаляем столбец.
else findCycle i j (colCount - 1) 1 [ plan !! ((n-1)*colCount +
(m-1)) |
n ← [1 rowCount], ‥
m ← [1 colCount], ‥
m ≠ (counter - rowCount)]))
listToArrayList :: [a] → Int → [((Int, Int), a)]
listToArrayList t colCount = [((i, j), (t !!((i-1)*colCount + j - 1))) |
i ← [1 ((length t) `div` colCount)], j ← [1 colCount]] ‥ ‥
16
-- | Функция рассчитывает потенциалы для опорного плана basePlan и матрицы
временных затрат t.
-- Возвращает пару списков: первый содержит вектор U, второй - V.
potentials :: [[Int]] → [Float] → ([(Int, Int)], [(Int, Int)]) → ([(Int,
Int)], [(Int, Int)])
potentials t basePlan pt =
let rC = (length t)
cC = (length ◊ head t)
in if ((length ◊ fst pt) ≥ rC) ((length ◊ snd pt) ≥ cC) ∧
then pt
else potentials t basePlan
((fst pt) [(n, (snd el) - t !! n !! (fst el) ) | ⊕
el ← snd pt,
n ← [0 rC-1], ‥
((last ◊ take ((fst el)+1) ◊ drop (n*cC) basePlan) ≠ 0.0) ∧
((lookup n ◊ fst pt) ≡ Nothing) ],
(snd pt) [(m, (snd el) + t !! (fst el) !! m) | ⊕
m ← [0 cC-1], ‥
el ← fst pt,
((last ◊ take (m+1) ◊ drop ((fst el)*cC) basePlan) ≠ 0.0) ∧
((lookup m ◊ snd pt) ≡ Nothing) ])
-- | Функция проверяет модель и (если нужно) добавляет фиктивный пункт
потребления или производства.
checkForClosing :: [Int] → [Int] → ([Int], [Int])
checkForClosing _ [] = error "checkForClosing: Can't process an empty list!"
checkForClosing [] _ = error "checkForClosing: Can't process an empty list!"
checkForClosing a b
| (sum a) ≡ (sum b) = (a, b)
| (sum a) > (sum b) = (a, b [sum a - sum b]) ⊕
| otherwise = (a [sum b - sum a], b) ⊕
getAddedVector :: [Int] → [Int] → Int
getAddedVector _ [] = error "getAddedVector: Can't process an empty list!"
getAddedVector [] _ = error "getAddedVector: Can't process an empty list!"
getAddedVector a b
| (sum a) < (sum b) = 1
| (sum a) > (sum b) = 2
| otherwise = 3
-- | Функция, реализующая метод северозападного угла, для построения опорного
плана.
northWesternCorner :: [Int] → [Int] → Int → [Int]
northWesternCorner [] _ _ = error "northWesternCorner: Can't process an empty
list!"
northWesternCorner _ [] _ = error "northWesternCorner: Can't process an empty
list!"
northWesternCorner a b c
| c > ((length a) * (length b)) = []
| otherwise = [me] northWesternCorner ⊕
((take ((c - 1) `div` (length b)) a) [ca - me] (drop (((c - 1)⊕ ⊕
`div` (length b)) + 1) a))
((take ((c - 1) `mod` (length b)) b) [cb - me] (drop (((c - 1)⊕ ⊕
`mod` (length b)) + 1) b))
(c + 1)
where
ca = a !! ((c - 1) `div` (length b))
cb = b !! ((c - 1) `mod` (length b))
me = min ca cb
-- | Функция, преобразующая вырожденный план в невырожденный.
makeNonDegeneratePlan :: [Int] → Int → [Float]
makeNonDegeneratePlan basePlan cC = [
if (i < ((length basePlan) `div` cC) - 1) (j > 0) && ∧
((basePlan !! (i*cC + j)) ≡ 0) ((basePlan !! ((i + 1)*cC + (j - 1))) ≡∧
0) &&
((basePlan !! (i*cC + (j - 1))) ≠ 0) ((basePlan !! ((i + 1)*cC + j)) ≠∧
0)
17
then 0.000001
else fromInteger ◊ toInteger (basePlan !! (i*cC + j)) |
i ← [0 ((length basePlan) `div` cC)-1], j ← [0 cC-1] ] ‥ ‥
-- | Функция, строящая цепочку из элементов подматрицы текущего плана, которая
содержит цикл.
--
getCycle :: Int -- ↑ i - строка элемента, вводимого в цепочку
→ Int -- ↑ j - столбец элемента, вводимого в цепочку
→ Int -- ↑ сС - количество столбцов подматрицы
→ [((Int, Int), Float)] -- ↑ cycle - подматрица, содержащая цикл
→ [((Int, Int), Float)] -- ↑ возвращается цепочка из не
использованных на текущей
-- и предыдущих итерациях положительных
элементов
getCycle i j cC cycle =
let rC = ((length cycle) `div` cC) - 1
-- Ниже обнуляем текущий элемент цепочки в подматрице (чтобы не обращать больше
на него внимания).
mCycle = [ (if (i ≠ n+1) (j ≠ m+1) ∨
then cycle !! (n*cC + m)
else (fst (cycle !! (n*cC + m)), 0.0)) |
n ← [0 rC], m ← [0 cC-1]] ‥ ‥
-- Ищем индекс ненулевого элемента в той же строке, в которой находится вводимый
в цепочку элемент.
id = (findIndex (>0) [ snd (mCycle !! ((i-1)*cC + m)) | m ← [0 cC-‥
1] ])
-- Проверка на отсутствие элементов, который можно ввести в цепочку
in if (length ◊ filter (>0) ◊ snd ◊ unzip mCycle) ≡ 0
then [cycle !! ((i-1)*cC + j - 1)]
else (if id ≠ Nothing
then [cycle !! ((i-1)*cC + j - 1)] (getCycle i ((fromJust id)+1) ⊕
cC mCycle)
else let idi = findIndex (>0) [ snd (mCycle !! (n*cC + j-1)) | n ←
[0 rC]] ‥
in if idi ≠ Nothing
then ([cycle !! ((i-1)*cC + j-1)] (getCycle ((fromJust idi)⊕
+1) j cC mCycle))
else error "getCycle: no non-zero elements in this row or
coloumn!")
18
7. Руководство пользователя
7.1. Системные требования
Процессор: Pentium I или аналогичный AMD, 400 MHz и выше.
ОЗУ: 64 Мб и более.
ОС: Windows 98, 2000, ХР.
7.2. Описание возможностей
Данная программа предназначена для решения транспортной задачи по
критерию времени вариантом метода потенциалов, при дополнительных
условиях, вводимых последовательно в процесс решения, а также
дооптимизации полученного решения по критерию стоимости.
Производится оптимизация транспортных перевозок, тем самым
сокращаются время перевозок и издержки.
В программе есть "Инженерный" режим работы, с помощью которого
можно просмотреть все этапы вычисления. Этот режим предназначен для
специалистов в данной области.
19
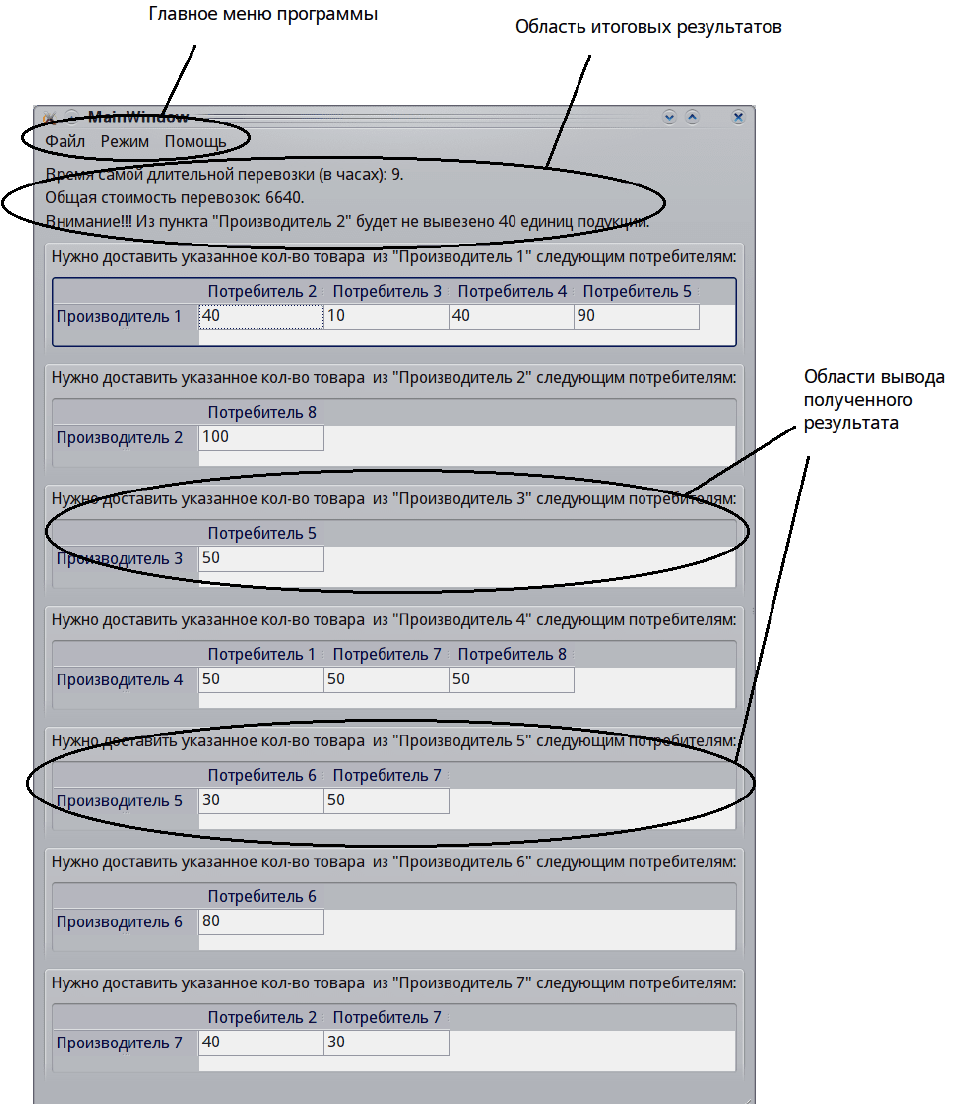
7.3. Основное окно программы
7.4. Главное меню программы
Главное меню программы содержит пункты «Файл», «Режим»,
«Помощь».
В пункте «Файл» находится подпункт «Выход», который используется
для завершения работы программы.
В пункте «Режим» находятся подпункты «Обычный» и
«Инженерный».
20