Контрольная работа - Механизм долбежного станка
Подождите немного. Документ загружается.

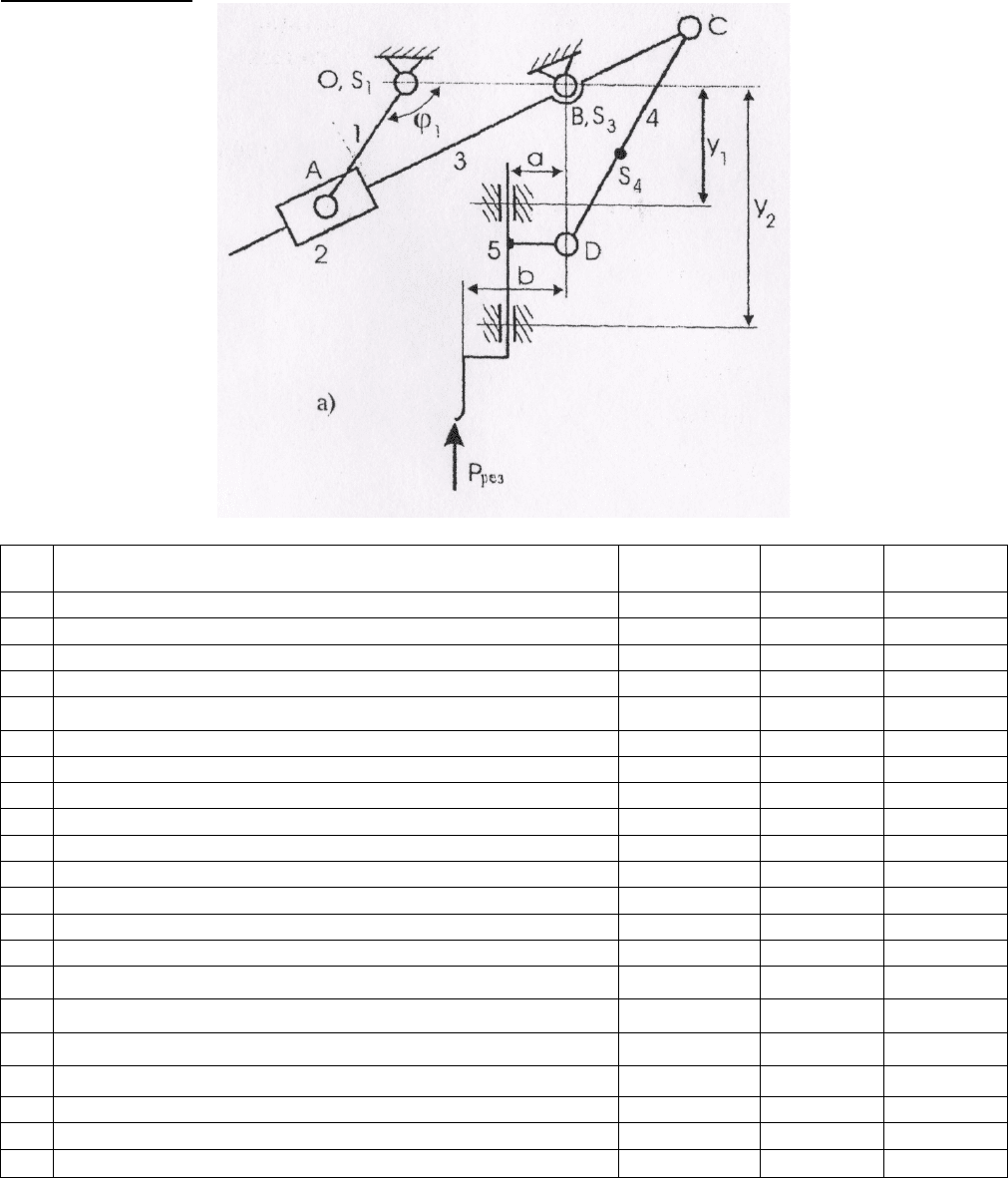
4. Механизм долбежного станка.
Исходные данные:
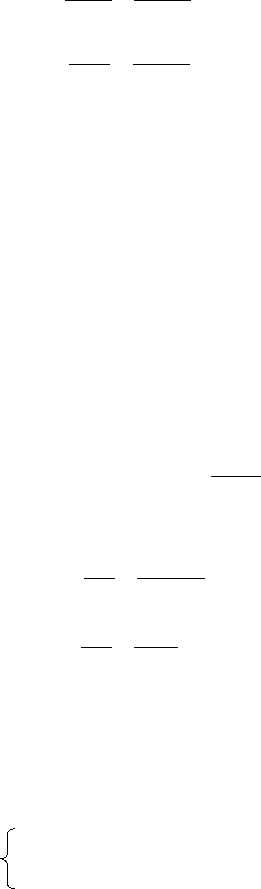
Рис. 1 - Рычажный механизм перемещения долбяка
№
п/п
Параметр
Условное
обозначение
Величина
Единицы
измерения
1 Размеры звеньев l
OA
0,1 м
l
OB
0,04 м
l
BC
0,9 м
l
CD
0,3 м
l
CS
4
=0.5 l
CD
0,15 м
2 Параметры расположения звеньев а 0,01 м
b 0,02 м
y
1
0,21 м
y
2
0,39 м
3 Частота вращения двигателя n
дв
1000 об/мин
4 Частота вращения кривошипа 1 n
1
100 об/мин
5 Масса звеньев рычажного механизма m
3
18 кг
m
4
4 кг
m
5
25 кг
6 Моменты инерции звеньев
J
S
1
0,20 кг м
2
J
S
3
0,18 кг м
2
J
S
4
0,04 кг м
2
J
дв
0,10 кг м
2
7 Сила резания Р
рез
1,9 кН
8 Коэффициент неравномерности вращения кривошипа δ 0,06 -
9 Положение кривошипа при силовом расчете механизма
φ
1
240 град
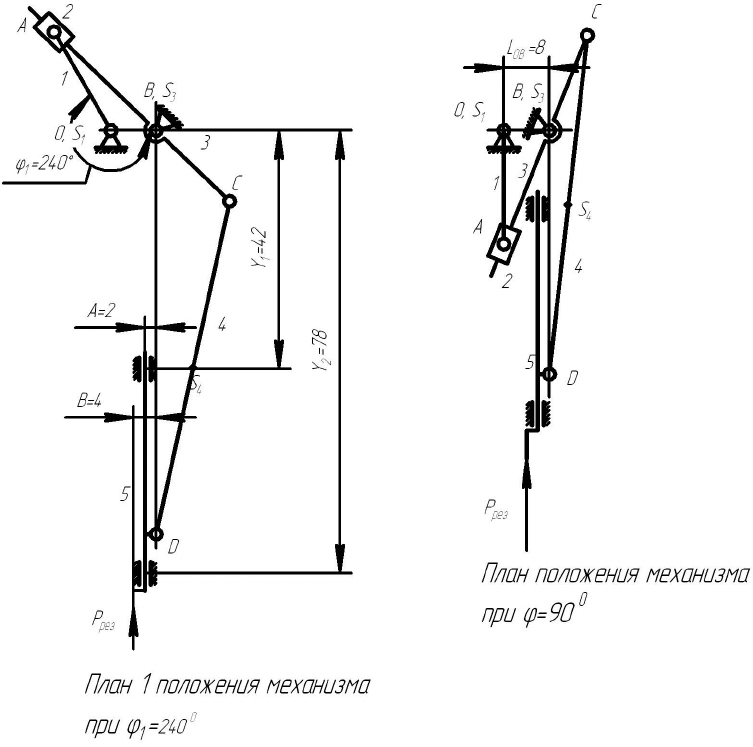
I. Построение плана механизма для первого положения при φ=90
0
.
Для выполнения плана положения механизма примем масштабный коэффициент
μ
l
=l
CD
/CD=0.005 м/мм, где l
CD
=0.30 м - действительная длина звена CD; CD=60 мм -
изображающий ее отрезок на чертеже.
Тогда чертежные размеры рычажного механизма будут равны:
ОА = l
OA
/ μ
l
=0.10/0.005=20мм;
ОВ = l
OB
/μ
l
=0.04/0.005=8 мм;
ВС = l
BC
/ μ
l
=0.09/0.005=18 мм;
CS
4
=
l
CS
4
/ μ
l
=0.15/0.005=30 мм;
А = а/ μ
l
=0.01/0.005=2 мм;
В = b/ μ
l
=0.02/0.005=4 мм;
Y
1
= y
1
/ μ
l
=0.21/0.005=42 мм;
Y
2
= y
2
/ μ
l
=0.39/0.005=78 мм.
Сначала построим план 1 положения механизма, для определения положения опор 5 звена
относительно точки D.
Для построения плана положения механизма:
1. Из точки О проводим отрезок ОА=20 мм под углом φ
1
=240
0
, согласно схеме механизма.
2. На горизонтальной линии из точки О откладываем отрезок ОВ=8 мм, получим точку В.
3. Через точки А и В проводим линию, соответствующую отрезку АС.
4. Из точки В откладываем отрезок ВС=18 мм, получим точку С.
5. Из точки С до вертикальной линии, проходящей через точку В, откладываем отрезок
CD=60мм.
6. Посередине отрезка CD откладываем точку S
4
.
7. На расстояниях Y
1
=60 мм, Y
2
=100 мм, А=2 мм и В=4 мм достраиваем остальную часть
рычажного механизма перемещения долбяка.
При построении плана механизма при φ=90
0
поступаем аналогичным образом, однако положения
опор 5 звена относительно точки D берем из предыдущего построения.
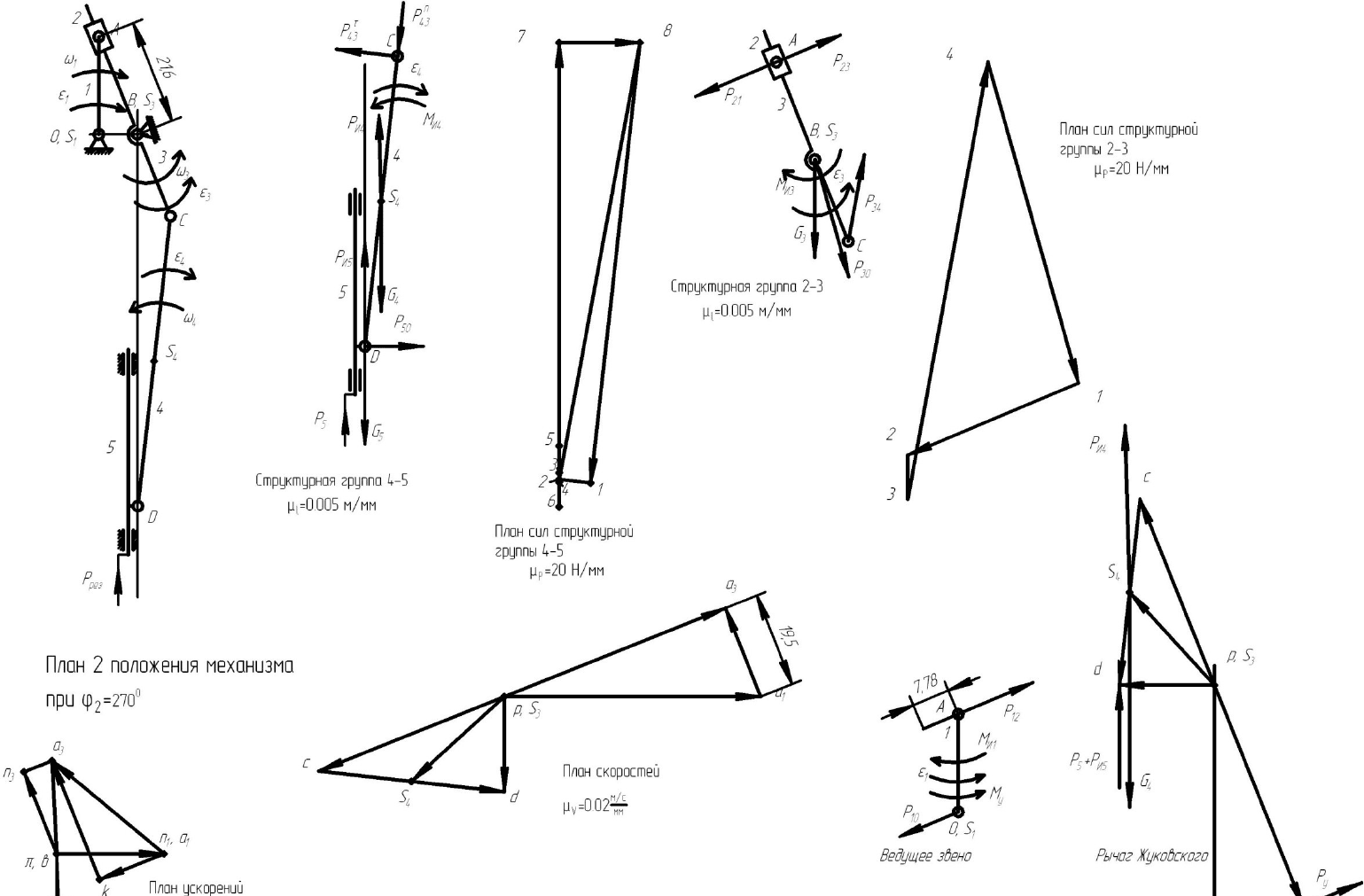
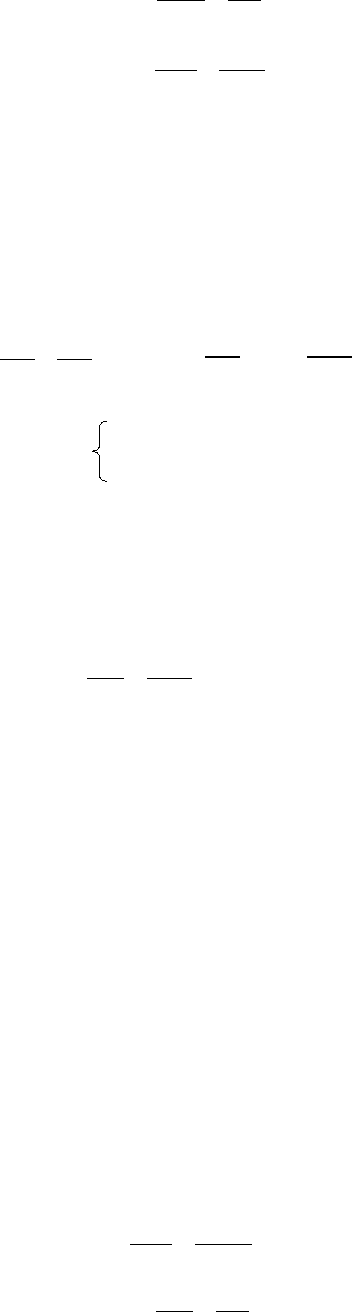
II. Построение планов скоростей и ускорений
Для построения плана 2 положения механизма отрезок ОА откладываем под углом
φ
1
+30
0
=240+30=270
0
. Кривошип 1 вращается по часовой стрелке. Остальные построения
выполняем аналогично, как для 1-го положения.
Для построения плана скоростей необходимо определить угловую скорость звена 1.
Определим его по формуле
ω
1
=
π ∙ n
1
30
=
3.14 ∙ 100
30
=10 , 5
рад
с
.
Кинематический анализ выполняется в последовательности определяемой формулой
строения механизма I(0,1)→II(2,3)→III(4,5).
Скорость точки А разложим на две скорости, поскольку звено 2 взаимодействует как с
первым звеном, так и с третьим.
Для механизма 1 класса:
скорость точки А
1
, принадлежащей к 1 звену
V
A
1
=ω
1
∙l
OA
=10 , 5∙ 0.10=1, 05 м /с
;
примем масштабный коэффициент
μ
V
=
V
A
1
[ pa
1
]
=
1 , 05
52 , 5
=0.02(
м/с
мм
)
.
V
A
1
перпендикулярно ОА в направлении ω
1
, тогда отрезок [ра
1
] отложим перпендикулярно ОА в
этом направлении.
Далее рассмотрим группу Ассура 2-3. Известными к началу рассмотрению являются
V
A
1
и
V
B
0
=0
(поскольку принадлежит стойке). Первоначально определим скорость точки А
3
.
Рассмотрим движение точки А
3
относительно точек А
1
и В
0
, в векторном выражении запишем:
V
A
3
=V
A
1
+V
A
3
A
1
(параллельно отрезку АВ);
V
A
3
=V
B
0
+V
A
3
B
0
(перпендикулярно отрезку АВ).
Точку А
3
находим как пересечение решений этих 2-х уравнений.
Скорость точки С определим по теореме подобия:
BA
CB
=
[ ра¿¿ 3]
[ pc ]
¿
; тогда [
pc ¿=
[ ра¿¿3 ]∙ CB
BA
=
49 ∙18
21, 6
=41 мм¿
. Размеры
[ ра¿¿3 ]¿
и ВА определяем
из чертежа. Скорость точки С лежит по линии действия точки А
3
.
Группа Ассура 4-5.
Известными к началу рассмотрению являются скорость точки C и
V
D
0
=0
(поскольку
принадлежит стойке).
Скорость точки D рассмотрим относительно точек С и D
0
, в векторном выражении запишем:
V
D
=V
C
+V
DC
(перпендикулярно отрезку CD через С);
V
D
=V
D
0
+V
D D
0
(параллельно у-у, вдоль направляющей).
Точка S
4
лежит посередине отрезка cd, поскольку
l
CS
4
=0.5 l
CD
. Скорость точки S
4
определяем путем
соединения полюса р с этой точкой.
Из плана скоростей находим линейные и угловые скорости:
V
A
3
=V
A
3
B
=
[
p a
3
]
∙ μ
V
=48.8∙ 0.02=0.976 м/с
;
V
с
=
[
pс
]
∙ μ
V
=41∙ 0.02=0.82 м /с
;
V
A
3
A
1
=
[
a
3
a
1
]
∙ μ
V
=19.5 ∙ 0.02=0.39 м /с
;
V
D
=
[
pd
]
∙ μ
V
=19.5 ∙ 0.02=0.39 м/с
;
V
S
4
=
[
p S
4
]
∙ μ
V
=25.8 ∙ 0.02=0.516 м /с
;
V
CD
=
[
cd
]
∙ μ
V
=38.3 ∙0.02=0.766 м/с
;
ω
3
=
V
A
3
B
l
AB
=
0.976
0.108
=9.1c
−1
;
ω
4
=
V
CD
l
CD
=
0.766
0.30
=2.6 c
−1
.
Направление угловой скорости ω
3
звена 3 получим, поместив вектор относительной скорости
V
A
3
B
в точку В и рассматривая поворот точки В относительно точки А
3
. Аналогично определяется
направление угловой скорости 4 звена.
Переходим к построению плана ускорений.
Ускорение точки А
1
а
А
1
=а
A
1
n
+а
A
1
τ
;
где
а
A
1
n
- нормальное ускорение точки А
1
, направленное от точки А
1
к точке О.
а
A
1
τ
- касательное (тангенциальное) ускорение точки А
1
, направленное перпендикулярно ОА в
сторону углового ускорения ε
1
.
а
A
1
n
=ω
1
2
∙ l
OA
=10.5
2
∙ 0.10=11, 025 м /с
2
;
а
A
1
τ
=ε
1
∙ l
OA
=1.5 ∙ 0.10=0.15 м /с
2
.
Примем масштабный коэффициент ускорений
μ
а
=0 ,5
м/с
2
мм
и находим отрезки, изображающие
а
A
1
n
и
а
A
1
τ
:
[π n
1
]=
a
A
1
n
μ
a
=
11.025
0.5
=22 мм
;
[n
1
а
1
]=
a
A
1
τ
μ
a
=
0.15
0.5
=0 ,3 ≈ 0 мм
Из полюса плана ускорений π откладываем отрезок πn
1
в направлении
а
A
1
n
. Поскольку
n
1
а
1
равно
нулю, то точки n
1
и а
1
совпадают. Значит данный отрезок будет полным ускорением точки А
1
.
Далее на основании теоремы о сложении ускорений в плоском движении составляем векторные
уравнения в порядке присоединения структурных групп.
Для определения ускорения точки А
3
используем уравнения
а
А
3
=а
А
1
+а
А
3
А
1
k
+а
А
3
А
1
r
а
А
3
=а
В
+а
А
3
B
n
+а
А
3
B
τ
где
а
А
3
А
1
k
- ускорение корриолиса,
а
А
3
А
1
r
- релятивное ускорение кулисного механизма;
а
В
=0
(точка В неподвижна);
а
А
3
B
n
и
а
А
3
B
τ
- нормальная и касательная составляющие ускорения точки А
3
при вращательном движении звена 2 относительно точки В. Вектор
а
А
3
B
n
направлен от точки В к
точке А
3
,
а
А
3
B
τ
- перпендикулярно АВ, вектор
а
А
3
А
1
r
- параллельно АВ.
а
А
3
А
1
k
=2∙ ω
3
∙V
A
3
A
1
=2 ∙ 9.1∙ 0 , 39=¿
7,1 м/с
2
.
Направление корриолисова ускорения получим, если повернуть вектор
V
A
3
A
1
на 90
0
в
направлении
ω
3
.
а
А
3
B
n
=ω
3
2
∙l
АВ
=9.1
2
∙ 0.108
=8.94 м/с
2
.
Находим отрезки , изображающие эти ускорения
[а
¿
¿1k ]=
а
А
3
А
1
k
μ
a
=
7.1
0.5
=14.2 мм¿
;
[b n
3
]=
а
А
3
B
n
μ
a
=
8.94
0.5
=18 мм
.
Систему уравнений для ускорения
а
А
3
решаем графически . Д ля этогоиз точки
а
1
откладываем
отрезок
[а¿¿1 k ]¿
в направлении
а
А
3
А
1
k
,
через точку k проводим линию в направлении
а
А
3
А
1
r
. Затем
из точки b, совпадающей с полюсом π, откладываем отрезок [πn
3
] в направлении
а
А
3
B
n
и через
точку n
3
- линию в направлении
а
А
3
B
τ
. В пересечении указанных линий получим точку а
3
, которую
соединяем с полюсом и получаем отрезок [πа
3
], изображающий
а
А
3
.
Точку с на плане ускорений находим по теореме подобия. Для этого вдоль отрезка πа
3
в
противоположном направлении откладываем отрезок [πс], который находим из подобия
АВ
ВС
=
πа
3
πс
;
πс=πа
3
ВС
АВ
=19.1
18
21.6
=16 мм
.
Для определения ускорения точки D используем уравнения
а
D
=a
C
+a
DC
n
+a
DC
τ
;
а
D
=a
D
0
+a
DD
0
❑
,
где
a
DC
n
и
a
DC
τ
- нормальная и касательная составляющие относительного ускорения точки D (по
отношению к точке С),
a
D
0
=0
(так как точка D
0
, принадлежащая стойке О и в данный момент
совпадающая с точкой D, неподвижна),
a
DD
0
❑
- относительное ускорение точки D по отношению к
точке D
0
(направленное вдоль линии движения звена 5, то есть параллельно у).
а
DC
n
=ω
4
2
∙ l
CD
=2.6
2
∙ 0.3=2.03
м/с
2
.
отрезок изображающий
а
DC
n
[с n
4
]=
а
DC
n
μ
a
=
2.03
0.5
=4 мм
.
В соответствии с системой уравнений из точки с откладываем отрезок
[с n
4
]
в направлении
а
DC
n
,
из точки n
4
проводим линию в направлении
a
DC
τ
. Из точки d
0
, расположенной в полюсе π,
проводим линию в направлении
a
DD
0
❑
. В пересечении указанных линий получим точку d, которую
соединим с полюсом π и получим отрезок [πd], изображающий
а
D
.
Точку S
4
находим по теореме подобия.
Поскольку
l
CS
4
=0.5 l
CD
, тогда
[
c S
4
]
=0.5
[
cd
]
=0.5 ∙ 4.2=2.1 мм
.
Соединив точки π и
S
4
получим отрезок [π
S
4
], соответствующий ускорению
а
S
4
.
Из плана скоростей находим линейные и угловые ускорения
а
А
3
=
[
π a
3
]
∙ μ
a
=19.1∙ 0.5=9.55 м/с
2
а
с
=
[
πс
]
∙ μ
a
=16∙ 0.5= 8 м /с
2
а
D
=
[
πd
]
∙ μ
a
=12∙ 0.5=6 м/с
2
а
S
4
=
[
π S
4
]
∙ μ
a
=14 ∙0.5=7 м /с
2
a
А
3
A
1
r
=
[
k a
3
]
∙ μ
a
=26.2∙ 0.5=13.1 м /с
2
a
A
3
B
τ
=
[
n
3
a
3
]
∙ μ
a
=6.2∙ 0.5=3.1 м/с
2
a
DC
τ
=
[
n
4
d
]
∙ μ
a
=1.2∙ 0.5=0.6 м /с
2
ε
3
=
a
A
3
B
τ
l
АВ
=
3.1
0.108
=28.7 c
−2
ε
4
=
a
DC
τ
l
CD
=
0.6
0.3
=2 c
−2
.
Направление углового ускорения
ε
3
звена 3 получим, поместив вектор тангенциального
ускорения
a
A
3
B
τ
в точку В и рассмотрев поворот точки В относительно точки А. Аналогично
определяем направление углового ускорения звена 4.
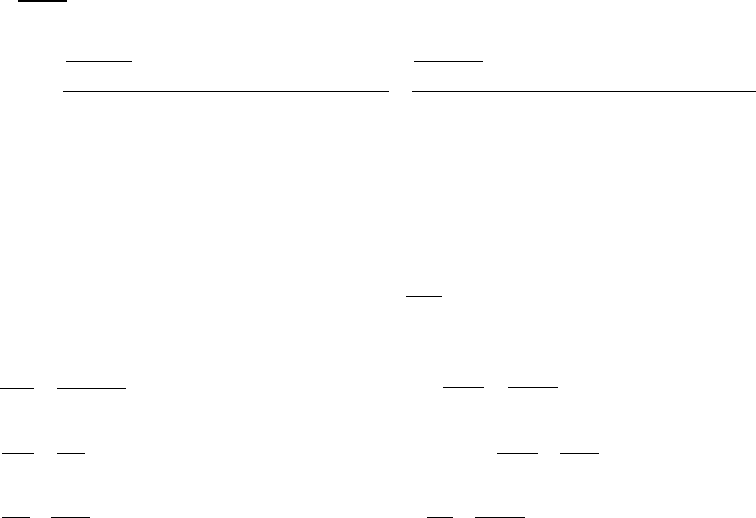
III. Определение реакций в кинематических парах и уравновешивающего момента
Главные векторы сил инерции:
Р
И
1
=−m
1
∙ a
S
1
=0
(так как центр масс S
1
находится на оси вращения и является неподвижным);
Р
И
3
=−m
3
∙ a
S
3
=0
(так как центр масс S
3
находится на оси вращения и является неподвижным);
Р
И
4
=−m
4
∙ a
S
4
=−4 ∙ 7=−28 Н
;
Р
И
5
=−m
5
∙ a
D
=−25 ∙6=−150 Н
.
Силы инерции приложены в центрах масс и направлены противоположно ускорениям центров
масс звеньев.
Главные моменты сил инерции:
М
И
1
=−I
П
I
∙ ε
1
=−33 ,7 ∙ 1 ,5=−50 , 6 Н ∙ м
;
М
И
3
=−I
S
3
∙ ε
3
=−0.18 ∙ 28 ,7=−5 , 17 Н ∙ м
;
М
И
4
=−I
S
4
∙ ε
4
=0 , 04 ∙ 2=−0 , 08 Н ∙м
Моменты сил инерции направлены противоположно угловым ускорениям звеньев.
Силы тяжести:
G
3
=m
3
∙ g=18 ∙10=180 H
;
G
4
=m
4
∙ g=4 ∙ 10=40 H
;
G
5
=m
5
∙ g=25 ∙10=250 H
.
Силовой анализ выполняется в порядке, обратном присоединению структурных групп.
Отделяем от механизма статически определимую структурную группу (4, 5). В точке С
вращательной пары прикладываем неизвестную по направлению реакцию Р
43
на звено 4 со
стороны звена 3, которую раскладываем на составляющие -
Р
43
n
, направленную вдоль звена CD и
Р
43
τ
, направленную перпендикулярно CD. Реакция на звено 5 со стороны стойки О Р
50
приложена
в точке D и направлена перпендикулярно направляющей.
Составляющую
Р
43
τ
находим из уравнения моментов всех сил, действующих на звено 4,
относительно точки D:
∑
М
D
=0
значит
Р
43
τ
∙CD +
M
И 4
μ l
+Р
И 4
∙ 4 ,2−G
4
∙ 4.2−Р
5
∙ 4=0
Откуда
Р
43
τ
=
−M
И 4
μ l
−Р
И 4
∙ 4 , 2+G
4
∙ 4.2+Р
5
∙ 4
CD
=
−0 , 08
0 , 005
−28 ∙ 4 ,2+40 ∙ 4 , 2+1900∙ 4
60
=127 , 24 Н
Здесь 4.2 - плечи сил, берутся непосредственно из чертежа измерением в миллиметрах.
Составляющую
Р
43
n
, полную реакцию Р
43
и реакцию Р
50
находим путем построения плана сил
согласно уравнению равновесия группы, которые записываем в соответствии с принципом
Даламбера:
Р
43
n
+Р
43
τ
+Р
И 4
+G
4
+Р
И 5
+G
5
+Р
5
+Р
50
=0
Примем масштабный коэффициент сил
μ
Р
=20
Н
мм
и находим отрезки, изображающие все
известные силы:
[
1−2
]
=
Р
43
τ
μ
Р
=
127.24
20
=6.4 мм
;
[
2−3
]
=
Р
И 4
❑
μ
Р
=
28 ,2
20
=1 , 4 мм
[
3−4
]
=
G
4
❑
μ
Р
=
40
20
=2 мм
;
[
4−5
]
=
Р
И 5
μ
Р
=
150
20
=7 , 5 мм
;
[
5−6
]
=
G
5
μ
Р
=
250
20
=12.5 мм
;
[
6−7
]
=
Р
5
μ
Р
=
1900
20
=95 мм
.
В соответствии с векторным уравнением последовательно откладываем отрезки [1-2], [2-3] и т.д.
в направлении соответствующих сил. Затем из точки 1 проводим направление силы
Р
43
n
, а из
точки 7 - направление силы Р
50
. В пересечении этих направлений получаем точку 8. Тем самым
многоугольник сил оказывается замкнутым. В результате находим
Р
43
n
=
[
8−1
]
∙ μ
Р
=90 , 7∙20=1814 Н
;
Р
43
❑
=
[
8−2
]
∙ μ
Р
=91 ∙ 20=1820 Н
;
Р
50
❑
=
[
7−8
]
∙ μ
Р
=16 , 5 ∙20=330 Н
.
Реакцию Р
54
, действующую на звено 5 со стороны звена 4 и приложенную в точке D, находим из
уравнения равновесия звена 5:
Р
И 5
❑
+G
5
+Р
5
+Р
50
+Р
54
=0
Для этого согласно этому уравнению на построенном плане сил достаточно соединить точки 8 и
4. Тогда
Р
54
❑
=
[
8−4
]
∙ μ
Р
=91 , 5 ∙20=1830 Н
.
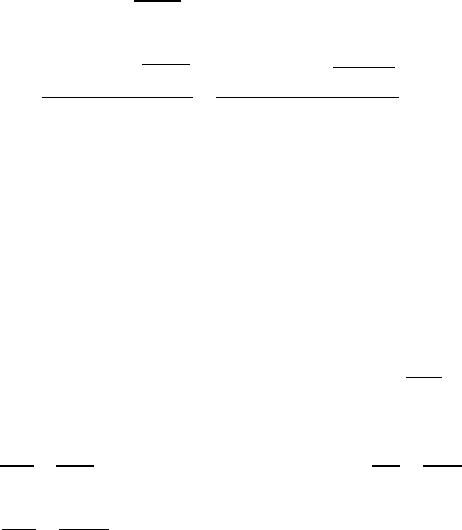
Далее рассматриваем структурную группу (2, 3). В точке С прикладываем известную реакцию
Р
34
=-Р
43
, а в точке А - реакцию со стороны звена 2 Р
23
и в точке В - реакцию со стороны стойки О
Р
30
.
Составляющую Р
23
, направленную перпендикулярно звену 2, находим из уравнения моментов
всех сил действующих на звено 2, относительно точки В:
∑
М
В
=0
значит
−Р
23
∙ АВ+Р
34
∙ 9 , 6−
М
И 3
μ
l
=0
.
Тогда
Р
23
=
Р
34
∙ 9 , 6−
М
И 3
μ
l
АВ
=
1820 ∙ 9 , 6−
5 , 17
0 , 005
21 ,6
=761 Н
.
Где 9,6 - плечо силы, берется непосредственно из чертежа измерением в миллиметрах.
Реакцию Р
21
, действующую на звено 2 со стороны звена 1 во внутренней кинематической паре А,
находим из уравнения равновесия звена 2:
Р
21
+Р
23
=0.
Тогда Р
21
=- Р
23
. То есть реакция Р
21
равна по величине реакции Р
23
и противоположна по
направлению.
Для определения реакции Р
30
строим план сил согласно уравнению равновесия группы:
Р
21
+G
3
+Р
34
+Р
30
=0
Примем масштабный коэффициент сил
μ
Р
=20
Н
мм
и находим отрезки, изображающие все
известные силы:
[
1−2
]
=
Р
21
μ
Р
=
761
20
=38 мм
;
[
2−3
]
=
G
3
μ
Р
=
180
20
=9 мм
[
3−4
]
=
Р
34
μ
Р
=
1820
20
=91 мм
.
В соответствии с векторным уравнением последовательно откладываем отрезки [1-2], [2-3] и т.д.
в направлении соответствующих сил. Соединив точки 1 и 4 получим направление и величину
реакции Р
30
. Тем самым многоугольник сил оказывается замкнутым. В результате находим
Р
30
❑
=
[
4−1
]
∙ μ
Р
=68 ,3 ∙ 20=1366 Н
.
В заключении рассматриваем начальное звено - кривошип 1. В точке А прикладываем известную
реакцию Р
12
=-Р
21
, а в точке О - реакцию Р
10
со стороны стойки О, которую находим путем
построения плана сил согласно уравнению равновесия:
Р
12
+Р
10
=0, следовательно Р
10
=-Р
12
.
Уравновешивающий момент находим из уравнения моментов:
∑
М
О
=0
значит
М
И 1
+Р
12
∙ 7 , 8 ∙ μ
l
−М
у
=0
,
откуда
М
у 1
=М
И 1
+Р
12
∙ 7 , 8∙ μ
l
=50 ,6+761∙ 8 ∙0 , 005=81 Н ∙ м
.
IV. Определение уравновешивающего момента методом рычага Жуковского

Для определения уравновешивающего момента сначала определим уравновешивающую силу Р
у
из условия равновесия рычага Жуковского. Она считается приложенной в точке А
перпендикулярно кривошипу ОА.
Строим рычаг Жуковского. Для этого план скоростей поворачиваем на 90
0
по часовой стрелке. В
точке S
4
прикладываем силу тяжести G
4
и силу инерции P
И4
, в точке d - силы Р
5
и Р
И5
, а в точке а
3
- Р
у
.
Составляем уравнение моментов относительно полюса рычага Жуковского
Р
у
∙ а
3
р−
(
Р
5
+Р
И 5
)
∙19, 5−Р
И 4
∙ 17 ,3+G
4
∙17 , 3=0
откуда
Р
у
=
(
Р
5
+Р
И 5
)
∙ 19 ,5+Р
И 4
∙ 17 ,3−G
4
∙ 17 ,3
а
3
р
=
(
1900+150
)
∙ 19 ,5+28 ∙ 17 , 3−40∙ 17 , 3
49
=811 Н
.
По формуле
М
у
=Р
у
∙l
ОА
определяем уравновешивающий момент
М
у 2
=811∙ 0 , 1=81 ,1 Н ∙ м
.
Сравнивая два значения уравновешивающего момента определенные различными методами
видно, что значения оказались одинаковыми
М
у 1
=М
у 2
.