Кончаков Е.И. Техническая диагностика судовых энергетических установок
Подождите немного. Документ загружается.

X
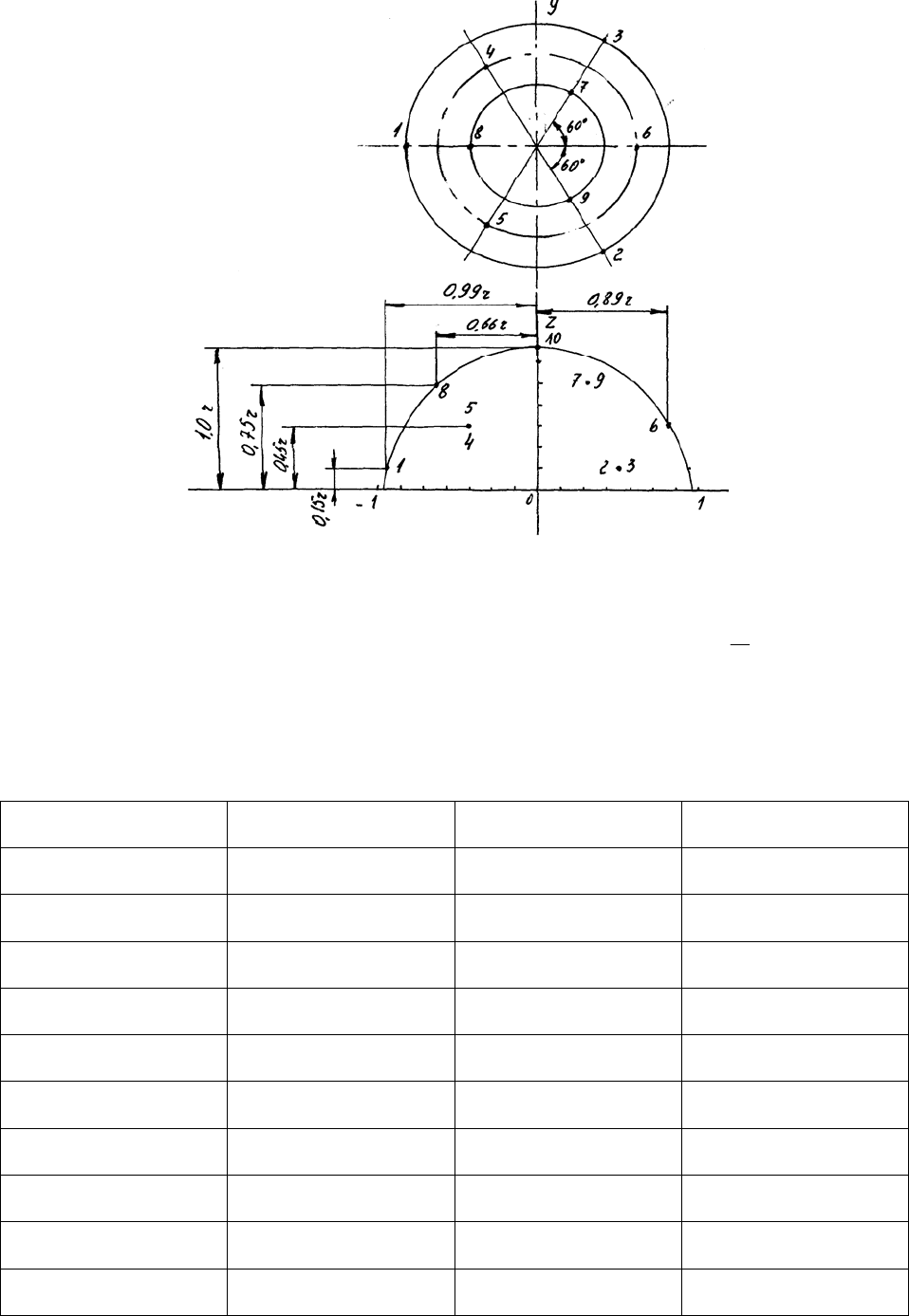
Рис. 34. Расположение точек замера
где - средний уровень звукового давления, = 10 lg
P
L
__
P
L
__
.100
1
1
0,1Lpi
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∑
=
n
i
n
Таблица 11
Координаты основных измерительных точек
Номер точки x/r y/r z/r
1 -0,99 0 0,15
2 0,50 -0,86 0,15
3 0,50 0,86 0,15
4 -0,45 0,77 0,45
5 -0,45 -0,77 0,45
6 0,89 0 0,45
7 0,33 0,57 0,75
8 -0,66 0 0,75
9 0,33 -0,57 0,75
10 0 0 1,0
81
Таблица 12
Рекомендуемые положения микрофона при доминирующих чистых тонах
Номер точек x/r y/r z/r
1 0,16 -0,96 0,22
2 0,78 -0,60 0,20
3 0,78 0,55 0,31
4 0,16 0,90 0,41
5 -0,83 0,32 0,45
6 0,83 -0,40 0,38
7 -0,26 -0,85 0,71
8 0,74 -0,07 0,67
9 -0,26 0,50 0,83
10 0,10 -0,10 0,99
Измерение в реверберационных камерах
Реверберационная камера – помещение, у которого стены, потолок и пол
не параллельны друг другу и хорошо отражают звук. В идеале, поскольку звук
от источника многократно отражается во всех направлениях между хорошо от-
ражающими поверхностями помещения, эти многократные отражения должны
образовать полностью диффузное звуковое поле, т. е. звуковое
поле, обладаю-
щее равной плотностью энергии во всех точках. (В действительности полно-
стью диффузное поле не существует).
Преимущества пользованием реверберационных камер:
их строительство значительно дешевле, чем заглушённых камер;
реверберационная камера пригодна для работы методом образцового ис-
точника шума; при этом определяют приближённое значение уровня звуковой
мощности путём сравнивания уровней
звукового давления испытываемого ис-
точника и образцового источника шума, для которого известен уровень звуко-
вой мощности.
82
Недостатки метода измерений в реверберационной камере:
этим методом нельзя определить направленность источника шума;
он даёт менее точные результаты измерения уровня звуковой мощности,
особенно для источников шума, имеющих доминирующие чистотональные со-
ставляющие.
4.8. Измерение звуковой мощности в полуреверберационных
помещениях
Измерения звукового давления часто приходится проводить в полуревер-
берационном пространстве
, т. е. в обычном помещении, которое не является ни
заглушённым, ни диффузным, в котором, кроме того, часто вместе с источни-
ком находятся другие предметы. Поэтому в определение звуковой мощности
необходимо включать поправку на отражение звука в помещении.
Метод измерения с помощью образцового источника шума
Для оценки влияния отражения звука
в полуреверберационном помеще-
нии можно использовать образцовый источник шума с известными уровнями
звуковой мощности в различных частотных полосах. Разность между извест-
ным значением уровня звуковой мощности источника и его значением, изме-
ренным в полуреверберационном помещении с использованием данной изме-
рительной поверхности, берётся затем как поправка на отражение звука в по-
мещении
для данной измерительной поверхности. Если измерения уровня зву-
кового давления проводятся с использованием одной и той же измерительной
поверхности (для обоих источников) как для исследуемой машины, так и для
образцового источника шума, помещённых на одно и то же место, уровень зву-
ковой мощности испытываемой машины можно найти по формуле
L
W
= L
WO
+ – ,
P
L
__
PО
L
__
83

где L
W
– уровень звуковой мощности испытываемой машины в полосе частот;
L
WO
– известный уровень звуковой мощности образцового источника шума
в той же полосе частот (определённый путём точных измерений в свободном
звуковом пространстве);
P
L
__
– средний уровень звукового давления на измерительной поверхно-
сти для испытываемой машины, который определён согласно уравнению
P
L
__
= 10 lg
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∑
=
n
i
n
1
0,1Lpi
100
1
;
– средний уровень звукового давления, полученный на той же изме-
рительной поверхности в полуреверберационном пространстве для образцового
источника шума.
PО
L
__
Этот метод позволяет получить удовлетворительные результаты измере-
ния звуковой мощности, достаточно точные для большинства технических
применений, причём нет необходимости определять такие характеристики по-
мещения, как звукопоглощение. Но для калибровки образцового источника
шума
необходимо использовать непосредственно перед его применением сво-
бодное звуковое поле. Кроме того, максимальная точность может быть достиг-
нута лишь при условии, что общая форма спектра образцового источника шума
близка к форме спектра испытываемой машины. Размеры машины и образцово-
го источника шума также должны быть одного порядка. Эти необходимые ус-
ловия
серьезно ограничивают применение метода образцового источника.
П р и м е р.
Уровни звукового давления в звуковой полосе со средней
частотой 2000 Гц в полуреверберационном пространстве, полученные с исполь-
зованием 8 точек, расположенных на полусферической измерительной поверх-
ности, построенной вокруг машины, составили 80, 84, 86, 88, 89, 92, 94 и 95 ∂Б.
После замены машины образцовым источником шума на том же месте уровни
звукового давления в тех же измерительных точках в полосе 2000
Гц составили
76, 78, 79, 82, 83, 86, 88 и 89 ∂Б. Уровень звуковой мощности образцового ис-
84
точника шума в октавной полосе 2000 Гц, измеренный в заглушённой камере,
равен 83 ∂Б. Необходимо определить уровень звуковой мощности машины в
этой октавной полосе.
Р е ш е н и е.
Средний уровень звукового давления на полусферической
поверхности
P
L
__
= 10 lg
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∑
=
8
1
0,1Lpi
100
8
1
i
= 90,7 ∂Б.
Средний уровень звукового давления на той же поверхности в случае об-
разцового источника шума равен
= 84,7 ∂Б. Уровень звуковой мощности
машины в октавной полосе со средней частотой 2000 Гц составил
PО
L
__
L
W
= L
WO
+ – = 83 + 90,7 – 84,7 = 89 ∂Б.
P
L
__
PО
L
__
Метод измерения в ближнем поле
Влияние отражения звука от стен помещения на измеряемые уровни зву-
кового давления вблизи небольшой машины, расположенной в относительно
большом помещении, должно быть невелико. Исходя из этого предложено оп-
ределить шумовые характеристики небольшой машины в обычном помещении,
производя измерения уровня звукового давления в точках, близко расположен-
ных к машине. Так, для машины
диаметром 0,31 м, на расстоянии от поверхно-
сти машины 0,31м, влияние отражённых волн в полуреверберационном поме-
щении с размерами 10 х 4 х 5 м пренебрежимо мало. Уровни звуковой мощно-
сти в третьеоктавных полосах, полученные путём измерения уровня звукового
давления в обычном лабораторном помещении на расстоянии 0,3 м от поверх-
ности небольшой электрической машины для
частот выше 315 Гц, почти совпа-
дают с уровнями звуковой мощности, полученными путём измерения уровня
звукового давления в заглушённой камере. Разность уровней звуковой мощно-
сти в третьеоктавных полосах, полученных путём измерений в полуревербера-
85
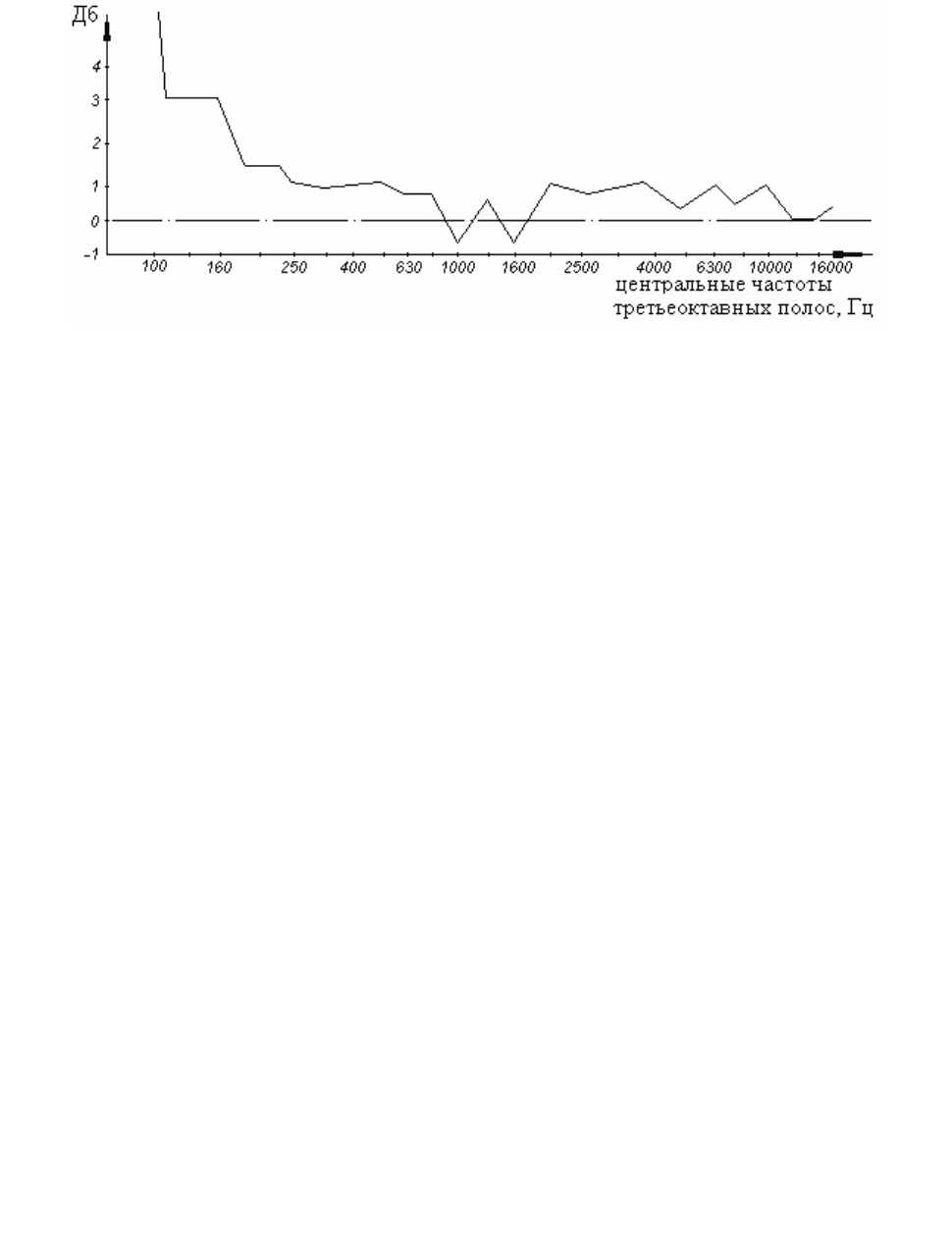
ционном пространстве L
Wб.п.
и путём измерений по полусфере в заглушённой
камере L
Wпсф
незначительна (рис. 35).
Рис. 35. Разность уровней звуковой мощности L
Wб.п.
и L
Wпсф
4.9. Измерение вибрации. Виброускорение, виброскорость,
виброперемещение, связь между ними
Вибрация – весьма сложное явление и характеризуется многими парамет-
рами.
Какие же величины подлежат измерению?
Во-первых, виброперемещения, а также их производные величины – ско-
рости и ускорения. Эти величины могут относиться как к отдельным точкам те-
ла (детали, машины, сооружения и др.), так и к поступательному движению, ко-
гда происходят прямолинейные колебания тела, и к вращательному движе-
нию, когда происходят угловые колебания тела относительно постоянной оси.
Во-вторых, частота колебаний.
В-третьих, фазы колебаний, характеризующие согласованность движения
той или иной точки с изменением во времени величины действующей силы или
согласованность движений различных точек тела.
В-четвертых, силовые величины – сила и момент, взаимодействующие
86

между объектами. Сюда же относится звуковое давление воздушной или жид-
кой среды при определении интенсивности шума.
Измерение одновременно движения и силы позволяет определять опыт-
ным путем такие характеристики, как импеданс, динамическую жесткость и об-
ратные им величины. Кроме того, иногда необходимы более сложные характе-
ристики движения, например, статистические характеристики, корреляционные
зависимости и др.
Для измерений и выдачи соответствующей информации применяются
виброизмерительные
приборы. Виброизмерительные приборы либо осуществ-
ляют непосредственный отсчет измеряемых величин по шкалам, либо произво-
дят запись процесса движения. Записи перемещений, скоростей и ускорений
называются виброграммами.
Приборы, которые являются частью измерительной системы, и непосред-
ственно воспринимают сигналы от механического движения и передают их для
последующего измерения, регистрации и анализа, называются датчиками. Су-
ществующие датчики построены на самых разных физических принципах дей-
ствия.
В современной сложной технике часто требуются очень чувствительные
средства измерений. Одно из таких средств – превращение механического дви-
жения в электрический сигнал, а затем усиление этого сигнала и его ре-
гистрация.
Электрические датчики могут: а) генерировать электрический сигнал под
действием механических колебаний – вибрации; б) изменять электрический
сигнал путем изменения его параметров (сопротивления и др.).
Один из принципов устройства датчика, генерирующего электрические
сигналы, – электромагнитная индукция, основанная на появлении эдс на выво-
дах обмотки при движении катушки в магнитном поле. Здесь постоянный маг-
нит укреплен на неподвижной станине, а катушка механически через упругий
элемент связанная с вибрирующим объектом движется поступательно. Элек-
87

тродвижущая сила катушки пропорциональна скорости v катушки относитель-
но неподвижного магнита. Чтобы получить данные, соответствующие переме-
щениям объекта, выходной сигнал, снимаемый с нагрузки Z в виде напряжения,
должен быть переработан, в данном случае его надо проинтегрировать. Если
нужно получить значение ускорения объекта, сигнал следует дифференциро-
вать. В некоторых датчиках катушка жестко связана с прибором, а постоянный
магнит упруго подвешен к прибору.
Наряду с датчиками, измеряющими поступательные перемещения, име-
ются датчики, приспособленные для измерения угловых перемещений и соот-
ветствующей вибрации. Такие приборы называются торсиографами.
К датчикам, электрические сигналы которых вырабатываются при изме-
нении параметров, относятся индуктивные электромагнитные и емкостные дат-
чики. Принцип их работы состоит в том, что в зависимости от величины воз-
душного зазора магнитной цепи между проводниками возникает изменение со-
противления магнитопровода или изменение емкости между проводниками.
К этой же группе датчиков относятся проволочные датчики, принцип
действия которых основан на изменении сопротивления проволоки при дефор-
мации «растяжение - сжатие». Они прикрепляются к поверхности деформируе-
мого тела и подают электрический сигнал, пропорциональный деформациям
поверхности тела.
Существуют датчики, в которых преобразование механической энергии в
электрическую основано на возникновении электрических зарядов в некоторых
кристаллах при действии на них сил. Это пьезоэлектрические датчики. Суще-
ствуют и другие типы датчиков: фотоэлектрические, акустические и т.д.
Усиление и преобразование сигнала, вырабатываемого датчиком, проис-
ходит в специальной аппаратуре. Как правило, такие приборы предназначены
для измерения и шума и вибрации
.
88
Контрольные вопросы
1. Для чего измеряют шум и вибрацию машин?
2. Что такое «децибел»?
3. Измерение шума – основные параметры. Звуковое давление, звуковая
мощность, уровень звукового давления, уровень звука.
4. Измерение звуковой мощности в полуреверберационных помещениях.
5. Виброперемещение, виброскорость, виброускорение – взаимосвязь
между ними.
89
ГЛАВА 5. ПРОЕКТИРОВАНИЕ АВТОМАТИЗИРОВАННЫХ
СИСТЕМ ДИАГНОСТИКИ НА ПРИМЕРЕ КОНКРЕТНОЙ
ПОДСИСТЕМЫ СЭУ
При проектировании САД выполняют следующие этапы работ:
1) Выбор методов диагностирования, контролируемых параметров и дат-
чиков.
2) Выбор процедур диагностирования, точно определяющих, что и как
нужно сделать, чтобы оценить состояние оборудования, найти неисправности и
т.д. Эта работа должна опираться на многолетний опыт специалистов по техни-
ческому обслуживанию и эксплуатации данного типа
оборудования.
3) Синтез алгоритмов диагностирования. Процедуры диагностирования,
записанные в виде подробных инструкций, берутся за основу при составлении
алгоритма. Алгоритм диагностирования включает также математический аппа-
рат примененных математических методов, например, для определения оста-
точного ресурса.
Автоматизированные системы диагностирования
В последние годы все более и более перспективными становится отказ от
планово-предупредительной системы обслуживания и ремонта СЭУ, переход к
непрерывному техническому обслуживанию судовых механизмов, выполнение
ремонта по мере фактической необходимости, а не через жестко назначенные
сроки, которые нередко оказываются неудачно выбранными, и приводит либо к
ненужным преждевременным вскрытиям механизмов, к
запоздалым ремонтам,
уже после прошедшей аварии.
Переход к эксплуатации СЭУ по фактическому состоянию возможен
только при наличии эффективной системы технической диагностики, предна-
значенной для функционирования вместе с человеком оператором с целью
90