Jan Svoboda. Magnetic Techniques for the Treatment of Materials
Подождите немного. Документ загружается.


250 CHAPT ER 3. THEORY OF MAGNETIC SEPARATION
Allen found that the magnitude of the torque acting on a cubic conducting
particle by a rotating field is
W
f
=
E
2
O
5
z
8(
s
(3.194)
where O is the length of the cube edge, z is the magnetic field rotation frequency
and (
s
is the resistivity of the material. For a sphere of diameter g
s
, the torque
is given by
W
f
=
E
2
g
5
s
z
60(
s
(3.195)
If such a torque is exerted on a particle by a rotating magnetic field, and
the particle is resting on a surface, the particle will be rolled when the torque
becomes greater than the gravitational force holding the particle against the
surface. The gravitational torque preventing a cubic-shaped particle from rolling
can be written:
W
j
=
O
4
2
s
j (3.196)
Combining eqs. (3.195) and (3.196) an estimate of the minimum size of a cubic
particle that could be rolled at a given magnetic field strength is obtained [A21]:
O
min
=
4
s
(
s
j
E
2
z
(3.197)
Equation (3.197) gives a reasonable estimate of the minimum size of a ”rollable”
cubic particle when the rotating magnetic field has its rotation axis at the centre
of the particle. In a more practical situation of a rotating drum eddy-current
separator, the magnetic field not only rotates the particle, but it is also moving
through the particle. This moving field produces a field which rotates in the
opposite direction, at half the field rotation frequency [A21]. The minimum
”rollable” cubic particle size, ignoring inter-particle interactions, can, therefore,
be estimated as
O
min
=
8
s
(
s
j
E
2
z
(3.198)
The rotating frequencies of the magnetic field, required to rotate and thus to
separate particles of various metals and various sizes in a magnetic field of 0.45
T, are shown in Fig. 3.71 [A21]. It can be seen, for example, that particles of
gold, as small as 60 m, could be separated by rotating them at the frequency of
1000 s
1
= The concept has been demonstrated by separating aluminium particles
from their mixture with sand, with the recovery of 86% and the concentrate
grade of 95 % Al, at the feed rate of 5 t/h/m [A17].
Chapter 4
Elements of Design of
Magnetic Separation
Equipment
4.1 Introduction
The design of a magnetic circuit for a magnetic separator is based on the need
to optimize the magnetic force required to separate e!ciently, and selectively,
particles of dierent magnetic susceptibilities. As transpires from eq. (1.8),
the magnetic force is the product of the magnetic field strength and of the
field gradient. The desired magnetic field strength, the field gradient and their
combination are a function of the type of material to be separated, mode of
separation, required metallurgical performance and economic criteria. In this
chapter the basic design criteria and techniques of the generation of the magnetic
field and its gradient, as used in magnetic separation, will be reviewed.
Magnetic circuit design has been traditionally di!cult because of the usual
non-analytic nature of the solutions for fields emanating from arbitrary sources.
Further, unlike currents in electric circuits, magnetic flux is not confined to the
wires but passes through various components of the circuit, including the air.
Over the years, several analytical techniques have been used to give approximate
solutions to magnetic design problems. In the simplest cases, the analytical so-
lution can be exact, but in general for any practical problem, analytical solutions
lead to large errors. Most designs are optimized by measurement and extrapo-
lation, and experience of working with a particular type of a magnetic circuit is
important.
The advent of powerful computational techniques, such as finite element
analysis, allows us to find accurate solutions for two- or three-dimensional field
distributions in complex geometries, which in turn may be used to predict de-
vice performance with similar precision. However, these modelling techniques
251
252 CHAPTER 4. DESIGN OF MAGNETIC SEPARATORS
require a detailed definition of the geometry and boundary conditions to be
solved, which assumes that an initial design already exists. While providing an
accurate field solution for a given geometry, these techniques will not optimize
it. Suggestions for changes in dimensions, materials etc. must come from the
designer. Consequently, while computer-based field analysis is an eective tool
for simulating a known device, it is too cumbersome for design optimization
[C16].
Field equations
Calculation of the flux in a magnetic circuit is based on two Maxwell’s equations.
The first, in its dierential form is:
u ×
K =
m (4.1)
where m is the current density. After integrating over an arbitrary surface V we
obtain the above equation in the integral form:
Z
V
(
u ×
K) · gd =
Z
V
m ·gd (4.2)
Then, using Stokes’s theorem, the left-hand side of this equation can be trans-
formed into a line integral around a closed path F, which bounds the surface V,
and
I
F
K · g
o =
Z
V
m · gd = L (4.3)
where L is the total current. This is Ampere’s circuital law: the line integral
of K around a closed path is equal to the total current crossing any surface
bounded by the line integral path. The left-hand side of eq. (4.3) is known as
magnetomotive force or ppi.
The second fundamental relationship required for a magnetic circuit design
expresses the fact that flux must be conserved through any closed volume, or,
that the total flux flowing out of any volume must be zero. Therefore
Z
V
E · gd =0 or
u ·
E =0 (4.4)
Equations (4.3) and (4.4) are two basic equations used for magnetic circuit
design.
4.2 Design of circuits with permanent magnets
4.2.1 Basic concepts and figures of merit
The general relationship between magnetic induction and intrinsic material mag-
netization or polarization is given by
E =
0
(
K +
P)=
0
K +
M (4.5)
4.2. DESIGN OF CIRCUITS WITH PERMANENT MAGNETS 253
BH
B
(BH)
ma
x
H
B
H
c
J,B
rr
H
ci
(BH)
max
(BH)
i
ma
x
Figure 4.1: The maximum energy products of permanent magnets.
The relationship between E and K is illustrated by the hysteresis curve shown
in Fig. 1.7. The second (demagnetization) quadrant of such a hysteresis curve is
important for description of the quality of a permanent magnet material. Rela-
tive contributions of M and K greatly influence the magnetizing, demagnetizing
and stability properties of permanent magnets. For instance, the coercive force
K
f
can never exceed the remanent magnetic induction E
u
:
0
K
f
E
u
(4.6)
while the intrinsic coercive force K
fl
is not under such a restraint.
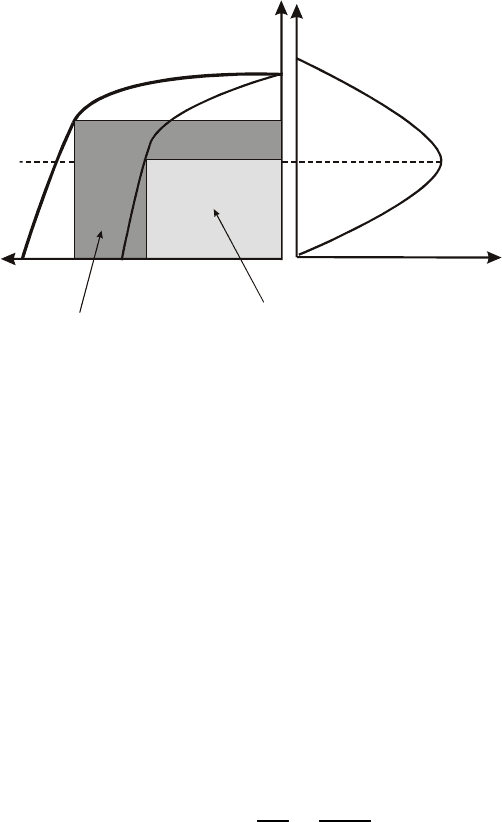
There is clearly one point between E
u
and K
f
for which the product of E
and K has a maximum value. The optimum operation of a magnet corresponds
to conditions under which this EK product is maximum. This maximum value
of the energy product is given by
(EK)
lim
max
=
M
2
v
4
r
=
0
P
2
v
4
(4.7)
where M
v
(or P
v
) is the saturation polarization (or magnetization) of the magnet
material. It transpires from this equation that, in order to establish the maxi-
mum capability of a permanent magnet, one has to know only the value of the
saturation polarization. The maximum value of the energy product corresponds
to the largest rectangle which can be drawn under the demagnetization curve
corresponding to the magnetic induction, as shown in Fig. 4.1. Another impor-
tant figure of merit is the intrinsic energy product (EK)
l
max
.Thisquantityisof
importance when the magnet is subjected to large demagnetizing influences in
its operating environment. The maximum intrinsic energy product corresponds
to the largest rectangle that can be drawn under the demagnetization curve
254 CHAPTER 4. DESIGN OF MAGNETIC SEPARATORS
Table 4.1: Relative permeabilities of permanent magnet materials.
Material Permeability
Alnico 6 4.2
Ferrimag 5 1.06
NdFeB 1.08 - 1.1
N
S
N
S
Ferrite
or NdFeB
Alnico
µ
2
>>
µ
1
µ
2
≅
µ
1
µ
2
µ
1
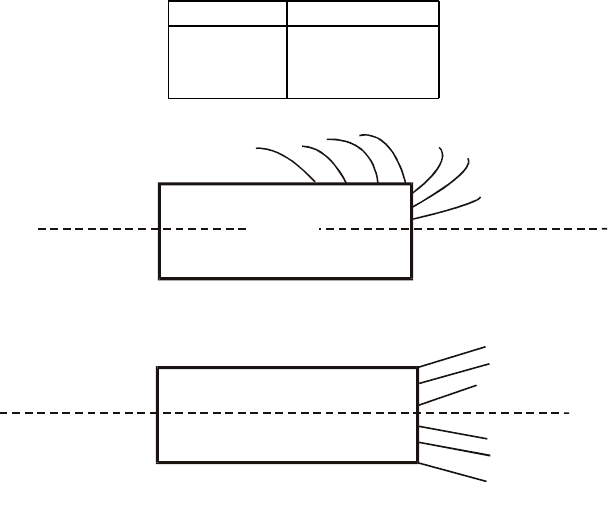
Figure 4.2: Flux leakage in two dierent types of permanent magnets.
corresponding to the material polarization. The situation is depicted again in
Fig. 4.1.
Dierent types of permanent magnets can dier considerably in their mag-
netic behaviour. For instance, the two energy products of an Alnico magnet
are very similar, namely (EK)
l
max
=
(EK)
max
, while for ferrite and rare-earth
magnets (EK)
l
max
AA (EK)
max
= The permeability of Alnico magnets diers
considerably from that of the air, namely
pdwhuldo
A
dlu
, while for ferrite and
rare earth magnets these permeabilities are similar, so that
pdwhuldo
=
dlu
.
Typical values of magnetic permeabilities are shown in Table 4.1.
As a result of the above dierences, the patterns of the magnetic flux around
a magnet also dier. As is shown in Fig. 4.2, the flux lines in Alnico magnets
leave the magnet limb perpendicularly, since the poles of the magnet are not at
the terminals, but appear to be spaced at about 0.7 of the length of the bar [P4].
On the other hand, in ferrite and rare-earth magnets the flux lines tend to reach
the terminal and the pole spacing is, therefore, the full length of the bar. In a
long bar of Alnico 5, only 45% of the lines in the neutral section of the magnet
reach the end of the bar. Therefore, a high percentage of the total energy is
4.2. DESIGN OF CIRCUITS WITH PERMANENT MAGNETS 255
L
g
L
m
A
g
A
m
Iron pole-pieces
Permanent magnet
Figure 4.3: Magnetic circuit with a permanent magnet.
stored in leakage fields. On the other hand, in a ferrite bar approximately 95%
of the flux at the neutral section reaches the end of the magnet. These magnets,
therefore, store most of their energy within their volume and their useful energy
approaches (EK)
max
[P4].
4.2.2 The static gap design
In a circuit with permanent magnets there are no currents, L = 0, and eq. (4.3)
reduces to
I
K · g
o =0 (4.8)
In a simple magnetic circuit of Fig. 4.3, with a permanent magnet and an air
gap, under static conditions, in which the dimensions of the air gap are constant,
eq. (4.8) can be re—written
Z
jds
K · g
o +
Z
pdjqhw
K · g
o =0 (4.9)
Therefore, the sum of the magnetomotive force (mmf) in the magnet and the
magnetomotive force in the air gap equals zero:
K
j
O
j
+ K
p
O
p
=0or K
j
O
j
= K
p
O
p
(4.10)
assuming that the soft-iron parts have infinite magnetic permeability. Also,
because the flux is continuous
E
j
D
j
= E
p
D
p
(4.11)
256 CHAPTER 4. DESIGN OF MAGNETIC SEPARATORS
In the above equations O
j
, D
j
and E
j
are the length, cross-sectional area and
the magnetic induction of the air gap, respectively, while O
p
, D
p
and E
p
are
the length, cross-sectional area and magnetic induction of the magnet. It can
be seen from eq. (4.9) that the magnetomotive force inside the magnet is in
the opposite direction to the magnetomotive force in the air gap. Permanent
magnets thus operate in the top left-hand quadrant (demagnetization quadrant)
of the hysteresis curve.
By multiplying eq. (4.10) by eq. (4.11) we get
K
j
E
j
Y
j
= K
p
E
p
Y
p
(4.12)
where Y
j
and Y
p
are the volumes of the gap and magnet, respectively. This
equation can be re-written as
1
0
E
2
j
Y
j
= K
p
E
p
Y
p
(4.13)
These equations illustrate that the larger the product K
p
E
p
and/or the vol-
ume of the magnet, the greater the magnetic induction in the air gap. It is
also possible to determine, from the above equation, the volume of the magnet
required to generate a desired flux density in a given air gap:
Y
p
=
E
2
j
Y
j
0
K
p
E
p
(4.14)
By combining eqs. (4.12) and (4.13) we can also write
E
p
K
p
=
0
D
j
O
p
D
p
O
j
= S
j
O
p
D
p
(4.15)
where S
j
=
0
D
j
@O
j
is the so-called permeance of the air gap, while the perme-
ance of the magnet can be defined as S
p
=
0
D
p
@O
p
. Permeance is a measure
of magnetic conductance which, if known, enables an accurate prediction to be
made concerning how much of the total flux of a magnet will reach the air gap.
The reciprocal of permeance is called reluctance, =1@S.
It can be seen from eq. (4.15) that by increasing the air-gap area and/or
reducing the air gap length the ease with which flux travels across this gap will
increase.
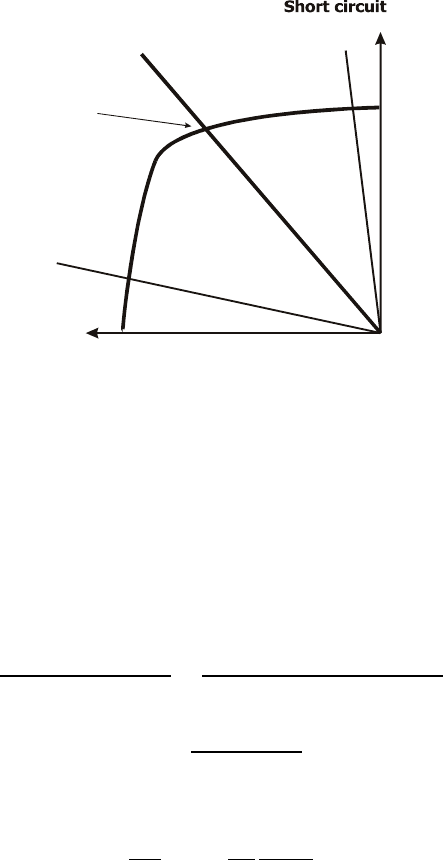
Equation (4.15) can be plotted as a straight line with a negative slope on
a demagnetization curve. The intersection of this so-called load line with the
demagnetization curve represents the operating point of the magnet, as shown
in Fig. 4.4. The slope of the load line is equal to
0
D
j
O
p
@D
p
O
j
= For a
very small air gap, in the limit O
j
$ 0> the magnet is short-circuited and
E
p
@
0
K
p
$4> as shown in Fig. 4.4. In the opposite case, if the soft iron
pole pieces are removed and the magnet stands alone, the air gap becomes large
and the magnet operates in the open circuit regime. The optimum operation of
the magnet is obtained when the working point on the demagnetization curve
corresponds to the maximum value of the product (EK), as illustrated in Fig.
4.1.
4.2. DESIGN OF CIRCUITS WITH PERMANENT MAGNETS 257
B
m
H
m
Load line
Open circuit
Operating point
Figure 4.4: The load lines of permanent magnets operating in dierent regimes.
4.2.3 Leakage factors
In all practical situations the pole pieces will have finite magnetic permeability
and even more importantly, there will be a considerable leakage of the magnetic
flux. Allowance for these imperfections can be made by introducing correction
factors N
1
(leakage coe!cient) and N
2
(loss factor) [P4]:
N
1
=
Total flux in circuit
Useful flux
=
Useful flux + Leakage flux
Useful flux
(4.16)
N
2
=
magnet mmf
useful mmf
(4.17)
The equation for the load line then becomes
E
p
K
p
=
0
N
1
N
2
D
j
O
p
D
p
O
j
(4.18)
It is of interest to note that the E
p
@K
p
ratio is entirely determined by the
physical relationships between the permanent magnet and the entire magnetic
circuit within which it functions. This ratio is independent of the material from
which the magnet is made.
Although the correction factor N
1
is rarely smaller than 2 and has no upper
limit, for reasonably e!cient permanent magnets it is in the range from 2 to 3.
The loss factor N
2
is generally much smaller than N
1
, usually within the range
1.05 to 1.45 [H18].
258 CHAPTER 4. DESIGN OF MAGNETIC SEPARATORS
Dynamic operation
If the magnetic circuit geometry does not remain unaltered, then the load line
slope in eq. (4.18) will change through any of the parameters O
j
, D
j
, N
1
and N
2
=
The operating point of the magnet may undergo an excursion within the short
and open-circuit limits shown in Fig. 4.4. A portion of the flux changes from
the leakage paths to the useful paths and back again, as the useful permeance
is changed. The operation of a lifting magnet is a typical situation in which the
magnetic system undergoes dynamic changes.
4.2.4 Determination of permeance and leakage factors
The primary requirement for magnetic circuit design, and therefore the design of
the basic magnet used in the circuit, is to be able to calculate the relationships
between flux paths. As pointed out in the previous section, the easiest approach
to such calculations is by means of permeances. In general, the permeance of the
flux paths varies from a minimum near the neutral section of the magnet to a
maximum for zones at the end of the magnet or close to the air gap. Relatively
simple formulae for various circuit geometries are available in the literature
[T6, P4, M19, H18, M20]. Adding the gap and leakage permeances using these
relationships is one of the methods of estimating the total permeance.
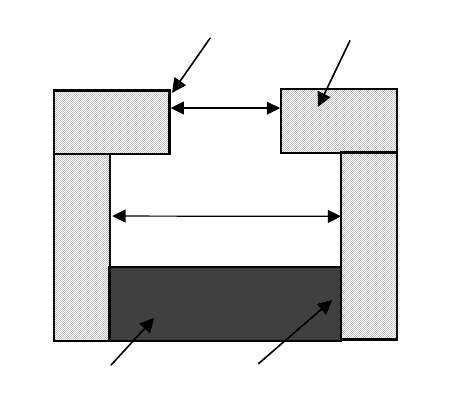
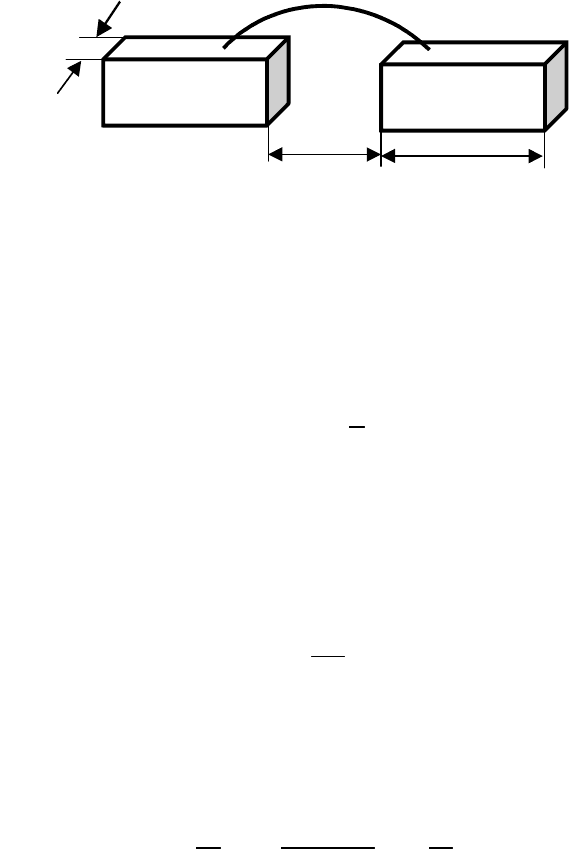
For instance, permeance of the air gap between rectangular surfaces of width
d and thickness e (Fig. 4.5) is given by
S =
0
de
O
j
(4.19)
This equation is a special case of a more general expression
S =
0
D
j
O
j
(4.20)
which is valid for any shape of the air gap. The leakage permeance of the
geometry shown in Fig. 4.5 is given by an approximate formula [H18]
S =
0
d
ln(
2e
O
j
+1) (4.21)
In order to demonstrate the di!culties facing a designer, Parker and Studders
[P12] quote, for the same geometry, another formula that leads to values of S
about 20% to 30% higher.
For a bar magnet that operates in the open-circuit mode, the permeance is
the permeance from one limb of the magnet to the other, since there are no pole
pieces or a well-defined air gap. Permeance of such magnets, of various shapes
such as bars, rods and rings, is
S =1=77
s
D (4.22)
4.2. DESIGN OF CIRCUITS WITH PERMANENT MAGNETS 259
a
L
g
b
Figure 4.5: Geometry of a magnetic circuit for calculation of the leakage perme-
ance.
where D is the cross-sectional area of the pole. This relationship is applicable
to ferrite and rare-earth magnets, while for Alnico magnets the relation is
S =1=77 × 0=7
s
D (4.23)
This equation takes into account the fact that for Alnicos the eective spacing
of the poles is only 0.7 of the total length, as shown in Section 4.2.1.
It is clear that the calculation of individual permeances is very laborious and
various empirical formulae have been developed for the determination of the
total leakage. A very simple example of such a formula [H18] is an expression
for the leakage factor N
1
for a gap of length O
j
between circular pole-pieces of
diameter g :
N
1
=1+
7O
j
g
(4.24)
Comprehensive sets of formulae, usually attributed to Tenzer [e.g. T6], are
available in the literature [e.g. H18]. For instance, in a magnetic circuit shown
in Fig. 4.6, in which the permanent magnet material is adjacent to the gap,
leakage from the sides and base, which are at the same potential, can be ignored.
The correction factor N
1
is then given by [H18, M19]:
N
1
=1+
O
j
D
j
(1=1X
d
0=67d
0=67d + O
j
)(1 +
O
j
d
) (4.25)
where X
d
is the perimeter of a part shown as length d= Similar equations are
available for other geometries [H18, M19].
4.2.5 Magnetic field around a permanent magnet
The distribution of the magnetic induction at various points of magnets operat-
ing in the open-circuit regime is shown in Fig. 4.7 and Table 4.2. The long thin
bar is magnetized along its long axis while the thin disc is magnetized along
its short axis. The sphere is magnetized along its diameter. It is of interest to