Иванов В.А. Схемы и конструкции элементов систем регулирования турбин ТЭС и АЭС
Подождите немного. Документ загружается.

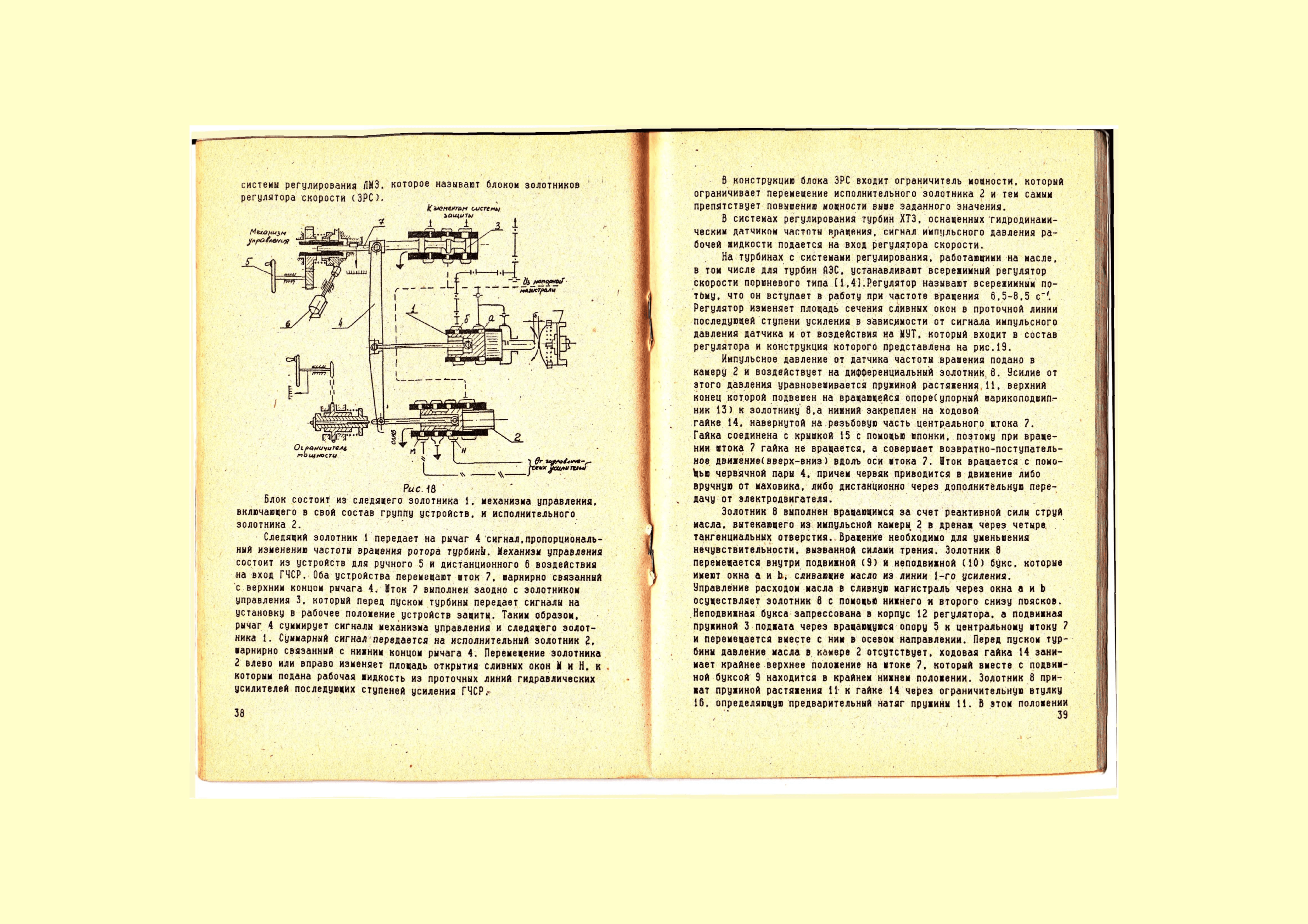
системы регули^анияЩЗ. которое н^ывают блоком золотников |
регуляТ'Ора.:ск.Орост« ff§ Щ
Рис. 16
Блок состоит из следящего золотника iмеханизма управления,
включающего в свой состав группу устройств, и исполнительного
золотника 2. |^
Следящий золотник 1 передает на рычаге4 сигнал,пропорциональ-
ный изменению частоты вращения ротора турбинЬ. Механизм управления
состоит из устройств для ручного 5 и дистанционного б воздействия
на вход ГЧСР. Оба устройства перемещают жток 7. шарнирно связанный
с верхним концом рычага 4< Вток 7 выполнен заодно с золотником
управления Щ который перед пуском турбины передает сигналы на
установку в рабочее положение устройств защиты. Таким образом,
рычаг 4 суммирует сигналы механизма управления и следящего золот-
ника II Суммарный сигна||передается на исполнительный золотник I,
варнирно связанный с нижним концом рычага 4. Перемещение золотника
2 влево или вправо изменяет площадь открытия сливных окон Ми Н, к
которым подана рабочая жидкость из проточных линий гидравлических
усилителей последующих ступеней усиления ГЧСР.-
В конструкцию блока ЗРС входит ограничитель мощности, который
ограничиваетПперемещение исполнительного золотника 2 и тем самым
препятствует повышению мощности выше заданного значения.
В системах регулирований Турбин %7Щ оснащённых гидродинами-
ческим датчиком импульсного давления ра-
бочей жидкости подается на вход рег^ятора скорости.
На Турбинах с системами регулирования;§работающиии на масле,
в том числе для турбин АЗС, устанавливают всережимный регулятор
скорости поршневого т^1|1,ЩрегуляТор называют
всережимн|вг
по-
тому, что он вступает
:
*
:
-р0Ё$%
при -частоте ^ащений||;.6.5-8.5
Регулятор изменяет площадь сечения сливных окон в проточной линии
последующей ступени усиления э зависимости от сигнала импульсного
давления датчика и
.fer
воздействия на М9Т| который входит в состав
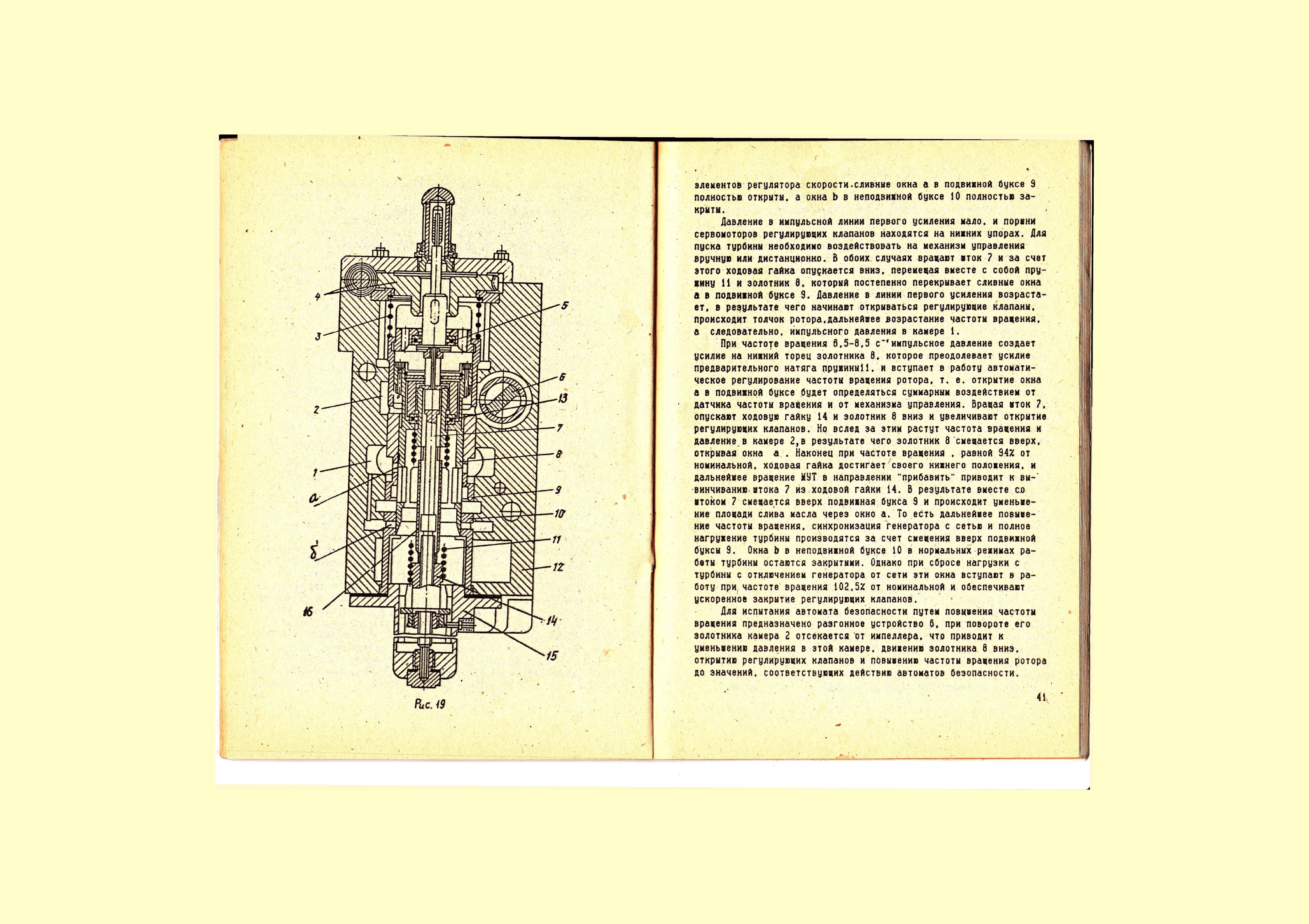
регулятора и конструкция которого представлена на рис.19.
Импульсное
•
давление'
4
датчика Частоты врашения подано в
камеру 2 и воздействует на диффере^иальный золотник, 8. Усилие от
этого давления уравновешивается пружиной растяжения,11, версий
конец которой подвешен на вращающейся опоресупорный шарикоподшип-
ник 13) к золотнику 8,а нижний закреплен на ходовой
гайке
и^авернутой
иа розьбовую част^центрадьного! штока !|||
Гайка соединена с крышкой
1
$
с помощью шпонки, поэтому при враще-
нии штока 7 гайка не вращается, а совершает возвратно-поступатель-
ное движение^вверх-вниз> вдоль оси штока 1|. Иток вращается с помо-
щью чрвячной пары 4, причем червяк Приводится в движение либо
вручную от махов|йа, либо дистанционно через дополнительную пере-
дачу от эл е к т род в ига тёля$1 ||§§
Золотник 8 выполнен вращающимся за C4*ffреактивной силы струй
масла,д^ытекающейр из ||щпульсной камеры 2 в Дренаж через четыре.- Щ
тангенциальных отверстия^ Вращение необходимо для уменьшения
нечувствительности, вызванной силами трения? Золотник 8
перемещается внутри подвижной (9^%.Неподвижной (10) букс, которые
имеют окна а и Ьг сливающие масло из линии щШ усиления.
Управление расходом масла в сливную магистраль через окна а и b
осуществляет золотник 6
cf
помощью нижнего и второго снизу поясков.
Неподвижная букса запрессована в корпус 12 регулятора, а подвижная
пружиной 3 поджата через вращающуюся опору 5 к центральному штоку 7
и перемещается вместе с ним* осевом направлении!*Перед пуском тур-
бины давление масла в. камере 2 отсутствует, ходовая гайка 14 зани-
маем крайнее верхнз||Положение на штокё;^ который вместе с подвиж-
ной буксой 9 находится в крайнем нижнем положении. Золотник 8 при-?
жат пружиной растяжения 11 к гайке 14 через ограничительную втулку
16.
определяющую предварительный Натяг пружины 11. В этом полошении
ж
foe. 19
4
элементов регулятора скорости^сливные окна
а в
подвивной буксе
9 Щ
полностью открыты,
а
окна
b в
неподвижной буксе
10
полностью
щ
крнтв
Щ §щ
Давление
в
импульсной линии первого усиления мало,
и
поршни
сервомоторов регулирующих клапанов находятся
на
нижних упорах.
Для
пуска турбины необходимо воздействовать|на механизм управления
вручную
или
дистанционно.;В обоих случаях вращают шток
7 и за
счет
этого ходовая гайка опускается вниз, перемещая вместе
с
собой
пру- Щ
мину
11 и
золотник в/который постепенно^ерекрыва сливные окна
а
в
подвижной буксе
9.
Давление
в
линий первого усиления возраста-
ет,
в
результате чего начинают Открываться регулирующие клапаны,
происходив толчок ротора.дальнейшее возрастание частоты вращения,
Щ
:
.
следовательно ^импульсного давления
в
камере
1.
При частоте вращения 6,5-8,5
с~
4
иипульсное
давление создает
усилие
на
нижний торец золотника
6,
которое преодолевает усилие
предварительного натяга прунины|1||и вступает
в
работу автомати-
ческое регулирование частоты вращения ротора,
т. е.
открытие окна
а
в
подвижной буксе будет определяться суммарным воздействием
от
датчика частоты врайения
и от
механизма управления. Вращая шток
7,
опускают ходовую гайку
14 и
золотник
8
вниз
и
увеличивают открытие
регулирующих клапанов.
Но
вслед
за
этим растут частота вращения
и
давление,в камере
2,в
результате чего*золотник
8
смещается вверх,
открывая окна а..Наконец
при
частоте вращения
,
равной
94% от
номинальной, ходовая гайка достигает'своего нижнего положения,
и
дальнейшее вращение
МУТ в
направлении •'прибавить" приводит
к вы-'
винчиванию.штока
7 из
ходовой гайки
14.jp
результате вместе
со
штоком
7
смещается вверх подвижная букса
9 и
происходит уменьше-
ние площади слива масла через окно
а. То
ебть дальнейшее повыше-
ние частоты вращения, синхронизация генератор сетью
и
полное
нагружение турбины производятся
за
счет сиещения вверх подвижной
буксы
9.
Окна
b в
неподвижной буксе
10 в
нормальных режимах
ра-
боты турбины остаются закрытыми. Однако
при
сбросе нагрузки
Щ
турбины
с
отключением генератора
от
сети
эти
окна вступают
в ра-
боту
при
частоте вращения
102,5%
от
номинальной
и
обеспечивают
ускоренное закрытие регулирующих клапанов.
Для испытания автомата безопасности путем повышения частоты
вращения предназначено разгонное устройство
6, при
повороте
его ||§
золотника камера
2
отсекается
от
импеллера,
что
приводит
к
уменьшению давления
в
этой камере, движению золотника
8
вниз,
открытию регулирующих клапанов
и
повышению частоты вращения ротора
до значений, соответствующих действию автоматов безопасности.
В подвижных элементах регулятору скорости применены
Щ
необходимые способы умек|шения нечувствительности, воз!никаюцей
за
счет
сил.
трения междуповерхностями: соприкосновения: центровка
пружин|; кольцевые разгрузочные канавке вращение золотника,^
Повышенные твердость «г чистоте поверхностей трущихся элементов.
Однако
при
применении воды
'|
качестве рабочей жидкости
перечисленных
мер
недостаточно лак
как она
опадает худшими
по
сравнению
с
маслом Домазывающими сврй[СТвамй|^В связи
с
этим
в
ГЧСР,
работающей
на
воде^ХТЗ применен регулятор ^скоростм
с
дополнитель
ной внутренней ступенью
усиление
?
£$,5),
что
позволяет увеличить
jfe
несколько
раз
перестановочное усилие
на
золотнике; уменьшив влия
ние
сил
трения
на
чувствительность регулятора скорости. Конструк
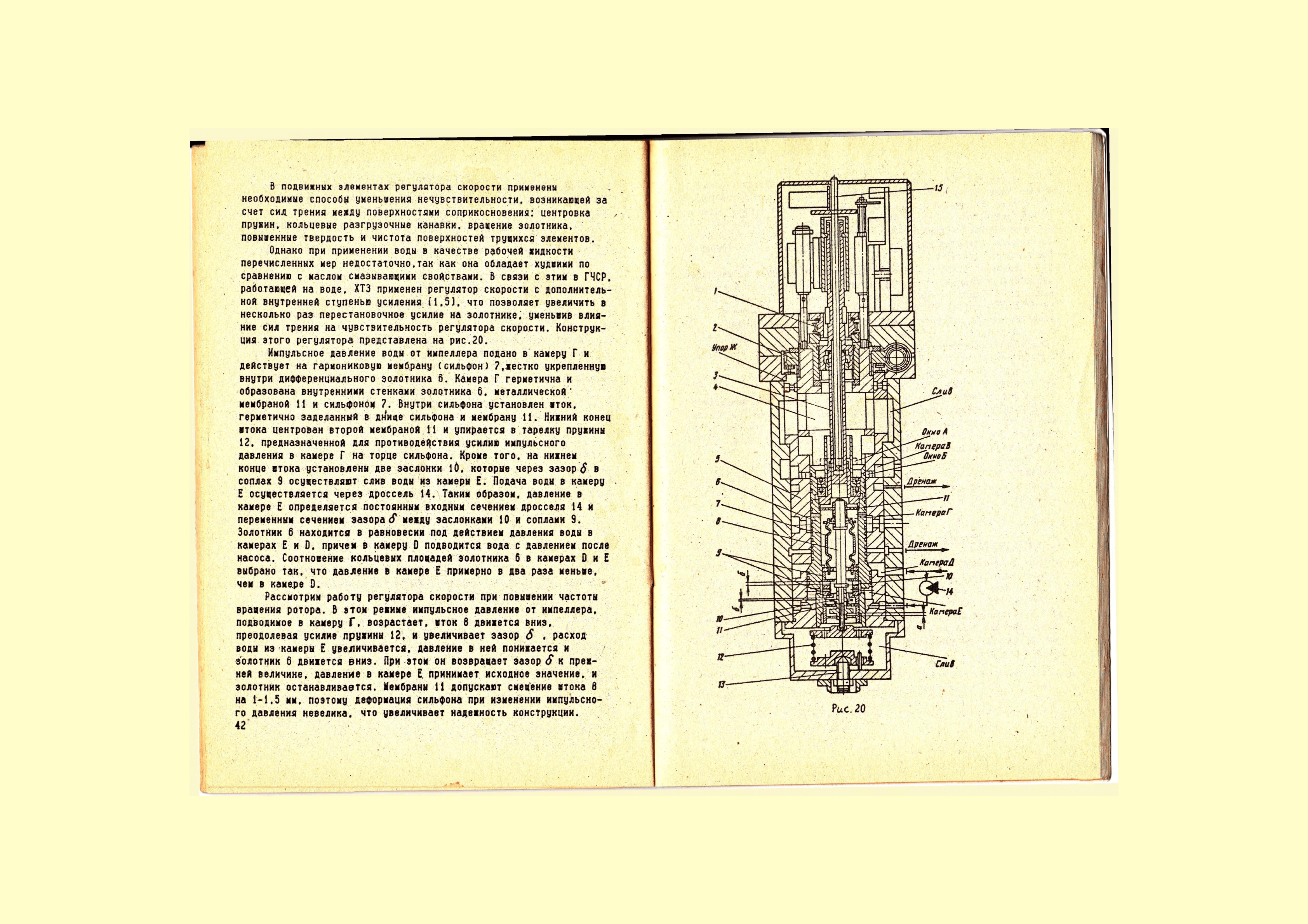
ция этого регулятора представлен на
рис.
20.
Ш^^Ш
Импульсное давление воды
от
импеллера подано
Ц
камеру
Г И;
действуем
на
гармониковую мембрану (сильфон) 7;жестко укрепленную
внутри дифференциального золотнШа
6.
Камера
F
герметична
-щ
образована внутренними стенками ^олотника
8.
металлической^
мембраной
11 и
сильфонбм
?;f
Внутри^ильфона установлен шток,
герметично заделанный
%
днище сильфона
и
мембрану
i
f
k
Нижний конец
штока центрован второй мембраной
11 и
упирается
в
тарелку пружины
12,
предназначенной
для
противодействия усилию импульсного
давления
в
камере Г?:на торце сильфона. Кроме того,
на
нижней
конце штока установлены
две
заслонк^id, которые через зазор
£ в
соплах
9
осуществляют слив воды
из
камеры
Е.
Подача воды
в
камеру
Е осуществляется через дросселе 14.\Таким Образом, давление
в Щ
камере
Е
определяется постоянным входным речением дросселя
14 т$
переменным сечением зазора& между заслонками
10 и
соплами
9.
Золотник
6
находится
в
равновесий
под
действием давления воды
у/;
камерах
Е и D,
причем
в
камеру
0
подводится вода
с
давлением после
насоса. Соотношение кольцевых площадей золотника
б в
камерах
0 и Е
выбрано так,|1чт'о давление
в
камере ^примерно
в два
раза меньше,
чем
в
камере"
|§|§|
Рассмотрим работу регулятора скорости
при
повышений частоты
вращения ротора.
В
этом режиме импульсное давление
от
импеллера,
подводимое
в
камеру
Г,
возрастает, иток
6
движется вниз,
преодолевая усилие пружины
12«^и
увеличивает зазор
6 %
расход
воды
из
камеры
Е
увеличивается, давление
в ней
понижается
и
золотник
6
движется вниз.
При
этом
он
возвращает зазор
S к
преж
ней величине|; давление
в
камеру
Е.
принимает исходное
значение,.*Щ
золотник останавливается. Мембраны
11
допускают смещение штока
8
на
Щ,
1р
им,
поэтому деформация сильфона
при
изменении импульсноМ
го давления невелика!!
что
увеличивает надежность конструкции., ,
!^
42"
ш шя $шв
|р| Рас. 20
Золотник 6 при перемещении изменяет площадь открытия окна А -
в подвижной буксе 4. которое управляет расходом масла в сливную
магистраль из линии 1-го усиления, подведенной в камеру В. При
достижении ротором частоты вращения
50,5-51,2
-с~
#
золотник допол-
нительно открывает окна Б в неподвижной буксе 5, а это приводит к
ускоренному закрытию клапанов' при сбросе нагрузки с отключением
генератора от сети.
Подвижная букса 4 является одновременно и элементом механизма
управления турбиной. Ее осевое положение изменяют путем вращения
червячного колеса 2, букса при этом не вращается, так как связана
японками с неподвижной буксой 5. Осевое перемещение буксы 4
изменяет площадь открытия сливного окна А, а следовательно, и
давление в линии 1-го усиления. Таким образом, окно А является
элементом, суммирующим входное воздействие от МНТ и от золотника
регулятора скорости.
Иэиенение настройки регулятора производят винтом 13, положе-
ние золотника 6 определяют по положению штока 15.
С
регулятором скорости скомпонован и ограничитель мощности,
который представляет собой шток 3, перемещаемый в осевом направле-
нии за счет вращения червячного колеса 1. 1ток 3 механически огра-
ничивает смещение золотника б вверх, ограничивая тем самым величи-
ну мощности заданным значением. |й ||| ;Щ
Регулятор скорости с внутренним усилением не является
всережимным, так как золотник б начинает свое движение вниз при
давлении воды за импеллером (камера
Г),
соответствующем частоте
вращения 47,5 с"'
2,4.1.2.
Механизм управления с силовым воздействием на датчик.
По классификации, примененной И.И.Кирилловым [в], данный механизм
отнесен к механизмам управления 1-го типа
(рода).
Принцип его дей-
ствия основан на том, что заданное значение регулируемого парамет-
ра устанавливают за счет„изменения силы натяжения пружины датчика.
В системах регулирования современных турбин МУТ 1-го рода применя-
ют в конструкции регуляторов давления для изменения заданного
зна-
чения давления пара в камерах регулируемых отборов теплофикацион-
ных турбин. Пример конструкции такого механизма управления
рас-
смотрен в п.2.2.1.
44
2.4.2.
Электро$идравлические преобразователи
Электрогидравлический йреобразователь (ЗГП) входит в состав
быстродействующего контура системы регулирования турбины и предна-
значен для
1|^|ачи
в
%
ГЧС^входнщ сигнале для быстрого изменения
мощности, поэтом^Ш) должен иметь /значения постоянной времени в
пределах несколькщ
5
'^отых до#ей секунды. Щт Ш
|Щ Быстродейс^ующий крнту^^^упает ^р'авоту Гпри сбросе нагруз-
ки с|Ьтключениеи генератора от сети, а также при противоаварийном
регулировании энергосистем,?дри котором необходимо, либо быстрое
разгружение, лрбо быстрое нагружение турбогенераторов! входящих в
срс тддодорго обгедине
нйй,§|
^Щ^^Ш
Щ некоторые режимах' раббты|знергосистем для поддержания их-§
устойчивости необходимо применять режим импульсной нагрузки, при
которсй турбина в течение нескольких секунд снижает мощность
вплоть Гдо нулевой^а затем так же быстро должна принять нагрузку
Основным требованием при противоаварийнои управлении является
высокая приемистость турбины;:поэтому быстродействующий контур Щ
должен обеспечить минимальное время запаздывания ^передаче
сигнал^ к регулирующим клапанам турбин^" Щ|
рассмотрим конструйцир! $ЙГ, применяемую ХТЗ ЦД}^
;.
ЗГП состоит^ из электромеханическо.го^реобразоват^ляС
ЗМП)
и Щ
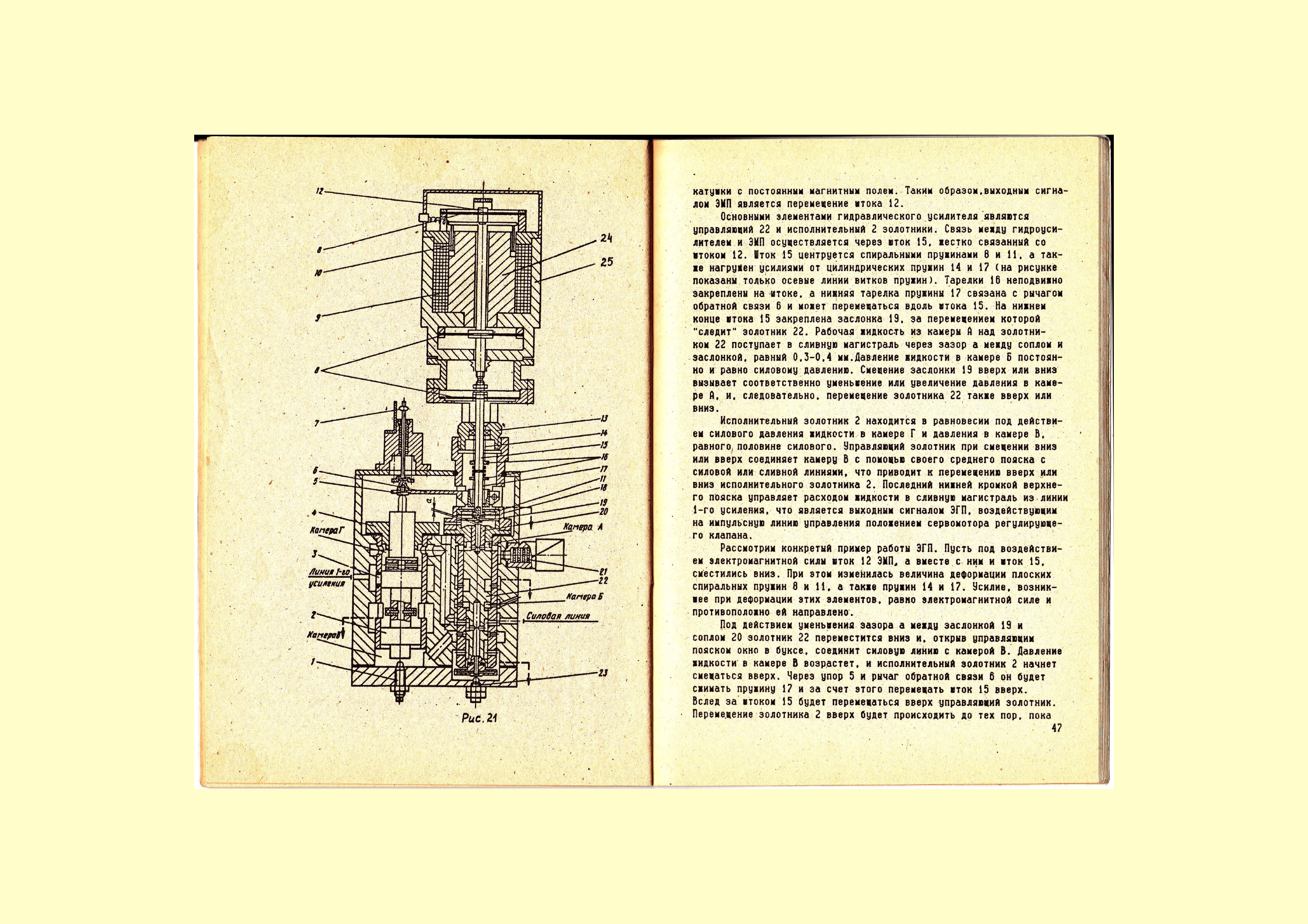
гидравлического усилителя-(рис,21). Щ Ю|
ЗМП предназначен для преобразования поступающего на его вход
I
электрического сигнала в механическое перемещение штока 12. Кроме
штока |2 в подвижнуй часw ЗМП входит управляющая обмотка *Щ на
вхоЖкоторой подается сигнал в виде постояннОг^ток|| Управляющая |
обмотка 10 расположена в воздушном кольцевом зазоре межд^ сердеч*^
никои 24 и обмоткой подмагничивания 9. В кольцевом зазоре создает-
ся.^агнитное поле постоянной напряженности | помощью магнитной
системы. Состоящейкорпуса' ^'$МП, '|§&рдечника 24
;
||.обмотки под-
магийчивания 9. Перемещение Управляющей обмотки 10 происходит за
счё||взаимодействия трйа^протекающего полней с постоянным, магнит- -.
ным полем, причемйвеличина перемещения пропорциональна величине
протекающего
ток^^'е.
величине входногС;сигнала, подаваемого на
ЗМН|
Направление Перемещение управляющей ^бмот^^дависит -т по-
лярности протекающего по ней тока.Управляющая обмотка жестко связа-
на со штоком 12, которр центрртся относительно сердечника 24 с
помощью плоских спиральных пружин 8. выполненных из немагнитного
материала (бронза)^Кроме того.спиральные пружины создают, усилие,
противодействующее электромагнитной силе взаимодействия управляющей
Ш ШШ Ш 45
K^TyvHii^lp'.'iiQCT^eHiiiiiij
iiftTHiiTHiiii
полек: Таким Образок .выходным сигна-
|| у
-
йсновнши элементами; гидравлического веилителя ;яел*штея
управляющий 22
и
исполнитёльнмй
2
золотники. Связь между од^роус#
;
лителемм^ЭМП фсущеотвляеш* через мад15, Жестко срязанцый се .
штоком
t2
;
.
ITOK-15
центруется спиральными пру винами
% и
11.
'&-$Шг
же нагружен усилиями от цилиндрических пружин 14
и
17 (на рисунке
закреплены на «токе,
а
нижняя тарелка пружины 17 связана
•
%
рычагорм.
обратной связи
6 и
может перемещаться &доль штока 15. На нижнем
Конце штокам 15 закреплена заслонка 19, за перемещением которой;
"следит"
золотник 22. Рабочая жидкостьиз камеры
й
над золотни- *
ком ^Аог^рает
в
сливнук магистраль через зазор
а
между соплом
и
заслонкой равный;0,3-0,4 мм.Давление жидкости
в
камере
Б
постоян-
но и
;
равно силовому давлению. Смещениезаслонки 19 вверх или вниз'
вызывает соответственно уменьшение или увеличение давления
в
каме-
ре Й» И, следовательно, перемещение золотник! 22 также вверх или
|й*из^''
'-Л;--
§f|§§
г!'ч>'^
Исполнительный золотник
2
находится
в
равновесии под действи-
ем силового давления жиДкостй/В камере
Г и
давления
в
камере В.
равного, половине силового. Управляющий золотник при смещении вниз
или ^вверх^ соединяет камеру
В с
помощью своего среднего пояска
с
Силовой или сливной линиями, что приводит
к
перемещению вверх$ли
вниз исполнительного золотника 2. Последний нижней кромкой верхне-
't'Щ
пояска управляет расходом жидкости
в
сливную магистраль из линии
^1*ЙК усиления, что является выходным сигналом ЗГИ. воздействующие!
на импульсную линию управления положением сервомотора регулирующе-
*Щ
клапану,
Я Wt<
Wl' i*^»'f*
Рассмотрим конкретый пример работ» ЗГП. Пусть под воздействи-
ем Злектромагнитной силы шток 12 ЭМП,
а
вместе
с
ним
и
шток 15,
сместились вниз. При этом изменилась величина деформации плоских
спиральных пружин
8 и
14,
а
также пружин 14
и
17. Усилие, возник^
шее при деформации этих элементов, равно электромагнитной силе
и
противоположно^^ направлено'.
Род действием уменьшения зазора
а
между заслонкой 19
и
соплом 20 золотник 22 переместится вниз и; открыв управляющим
ПОЯСКОМЕ
окно
в
буксе., соединит силовую линию
с
камерой В. Давление
|рдкости
в
камере
В
возрастет,
и
исполнительный золотник
2
начнет
:
i
смещаться вверх. Через упор
5 и
рычаг обратной связи
5
он буде*
сжимать пружину 17
и
за с^ет $того перемещать жток 15 вверх.
Вслед
за'
штоком 15 будет ^перемещаться вверх управляющий золотник,
:
Перемещение золотника
2
вверх будет происходить до тех пор, пока
Ш 47
•ток 12ЗИП не возвратится
в
исходное половение под действием
Щ
сжатия пружины 17 рычагом б, при этом управляющий поясок золотника
22
закроет окно подачи жидкости из силовой линии. На рис,21 пока-
заны элементы, непосредственно -не участвующие
в
усилении сигнала
от ЗМП.^К нии относятся: упоры
il
и
23, вставка 3, крынки
§ и
16,
указатель
7
перемещения золотника 2, уплотнительная гайка13,
дроссельная жайба 21,
f,'.
г'?Д'
2.5.
Система защиты турбина
N1
пз
ж
ыг
ПЗ
лзмпэ
35
№
ЗУ
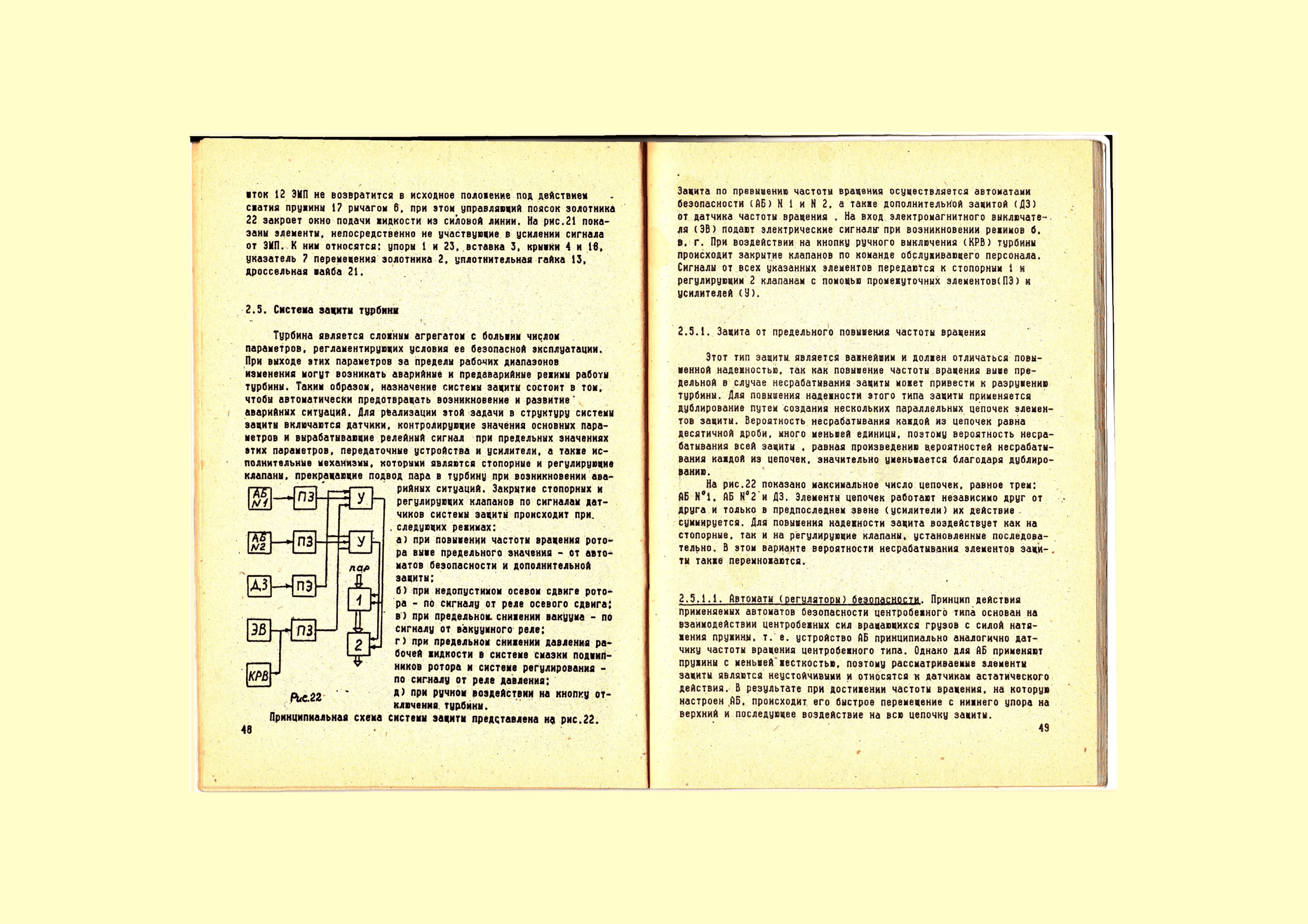
Турбина является сложным агрегатом
с
большим числом
Щ
параметров, регламентирующих условия ее безопасной эксплуатации.
При выходе этих параметров за пределы рабочих диапазонов
изменения могут возникать аварийные
и
предаварийные режимы работы
турбины. Таким образом, назначение системы защиты состоит
в
том,
чтобы автоматически предотвращать возникновение
и
развитие*
i
аварийных ситуаций. Для реализации этой задачи
в
структуру системы
защиты включаются датчики, контролирующие значения основных пара-
метров
и
вырабатывающие релейный сигнал при предельных значениях
етих параметров, передаточные устройства
и
усилители,
а
также ис-
полнительные механизмы, которыми являются стопорные
и
регулирующие
клапаны, прекращающие подвод пара
в
турбину при возникновении ава-
рийных ситуаций. Закрытие стопорных
и
регулирующих клапанов по сигналаы
дат-
чиков систеыы защиты происходит при.
следующие режииах:
:/: Щ
а) при повышении частоты вращения рото*
ра выше предельного значения
-
от авто-
матов безопасности
и
дополнительной
защиты:
|Щ щ
б) при недопустимом осевом сдвиге рото-
ра
-
по сигналу от реле осевого сдвига:
в) при предельном, снижении вакуума
-
по
сигналу от вакуумного реле:
Э^йри
предельном снижении давления ра-
бочей жидкости
в
системе смазки подшип-
ников ротора
и
систеие регулирования
по сигналу от реле давления^
д) при ручном воздействии на кнопку от-
ключения, турбины ^Шй
а.
г
Ае.22
48
Принципиальная схема систеин защити представлена на.
рис.22.
•
'•..•-г:
Защита по превышению частоты вращения осуществляется автоматами
безопасности (ЙБ)
N 1 и N
2.
а
также дополнительной защитой (ДЗ)
от датчика частоты вращения
4
На вход электромагнитк§го выключате-
ЩлШ)
подают электрические сигналыг^нри возникновении режимов
б,
0,'Г. При воздействии на кнопку ручного выключения (КРВ) турбины
происходит закрытие клапанов по команде обслуживающего персонала.
Сигналы
о^всех
указанных элементов передаются
к
стопорным
1 и
регулирующш|$§клапанам
с
помощью промежуточных злементов(ПЗ)
и
усилителей (У).
2.5.1.
Защита от предельного повышения частоты вращения
Этот тип защиты, является важнейшим
и
должен отличаться повы-
шенной надежностью, так как повышение частоты вращения выше
пре-
дельной
в
случае несрабатывания защиты может привести
к
разрушению
турбины. Для повышения надежности этого типа защиты применяется
дублирование путем создания нескольких параллельных цепочек элемен-
тов защиты. Вероятность, несрабатывания; каждой из цепочек равна
десятичной дроби, много меньшей единицы, поэтому вероятность несра-
батывания всей защиты
,
равная произведению вероятностей несрабаты-
вания каждой из цепочек, значительна;уменьшается благодаря дублиро-
ванию.
На рис.22 показано максимальное ;^исло цепочек, равное трем:
йБ
N*l
#
ЙБ N*
2
*
и ДЗ J Элементы цепочек работают независимо друг
от
друг^^'только
в
предпоследнем звене (усилители) их действие
.
суммируется. Для повышения надежности защита воздействует как на
стопорные, так
и
на регулирующие клапаны, установленные последова-
телен^ В этом вероятности несрабатывания элементов защи-.
ты также перемномаютсШ!
2.5.1.1.
Автоматы (регулярны) безопасности. Принцип действия
применяемых автоматов безопасности центробежного типа основан
на
взаимодействии центробежных сил вращающихся грузов
с
силой натя-
жения пружины, т. е. устройство ЙБ принципиально аналогично
дат-
чику частоты вращения центробежного типа. Однако для ЙБ применяют
пружины
с
меньшей'жесткостью, поэтому рассматриваемые элементы
защиты являются неустойчивыми
и
относятся
к
датчикаи астатического
действия.
В
результате при достижении частоты вращения, на! которую
настроен ЙБ, происходит его быстрое перемещение
с
нижнего упора на
верхний
и
последующее воздействие на всю цепочку защиты.
Щ Щ Щ
49
•0.
Турбостроительные заводы применяют автоматы безопасности
бойкового и
:
кольцевого ти|ов. Щ1 ЦЦ
Автоматы безопасности .бойкового типа применены в системах
защити турбин ЛМЗ (по заводской терминологии Щ регуляторы
безопасности).
Щ
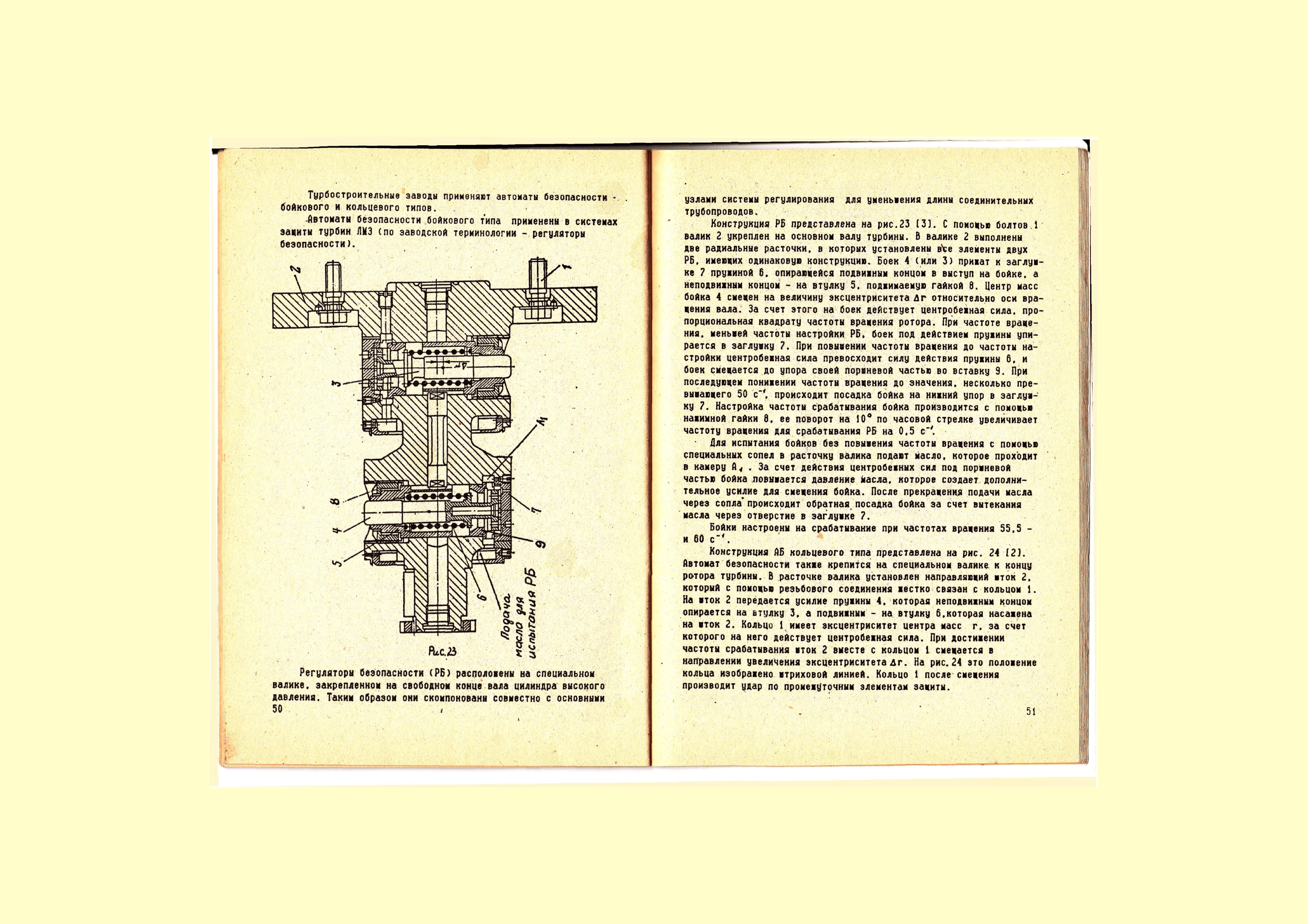
Регуляторы безопасности (РБ )ра^ло1енм на специальном |$
валике, закрепленном на свободном конце вала цилиндра высокого
давления.^/Гаким образом они скомпонованн совместно ^основными
и. ш
узлами системы регулирования для уменыения длины соединительных
трубопроводов
I
Конструкция РБ представлена на рис.23
[3].
С помощью болтов!
валик 2 укреплен на основном
вал^
турбины. В валике 2 выполнены
две радиальные расточки
,f
в которых установлены в\е элементы двух
РБ,
имеющих одинаковую конструкцию. Боек 4 (или 3) прижат к заглуи
ке 7 пружиной 6, опирающейся подвижным концом в выступ на бойке, а
неподвижным концом ff на втулку 5. поджимаемую гайкой 8. Центр масс
бойка 4 смещен на величинуЭксцентриситета дг относительно оси вра
щения валаЖЗа счет этого на боек действует центробежная сила, про
порциональная квадрату частоты вращения ротора. При частоте враще
ния,
меньшей частоты настройки РБ, боек под действием пружины упи
рается в заглужку %При повышении частоты вращения до частоты на
стройки центробежная сила превосходит силу действия пружины 6, и
боек смещается до упора своей поршневой частью во вставку 9. При
последующем понижении частоты вращения до значения, несколько
пре
вышающего 50 с"', происходит посадка бойка на нижний упор в заглуш
ку 7. Настройка частоты срабатывания бойка производится с помощью
нажимной гайки 8, ее поворот на 10° по часовой стрелке увеличивает
частоту вращения для срабатывания РБ на 0,5 с"'. Ц| |0
Для испытания бойков без повышения частоты вращения с помощью
специальных сопел в расточку валика подают масло, которое проходит
в камеру ft* . За счет действия центробежных сил под пориневой
частью бойка повышается давление масла, которое создает дополни
тельное усилие для смещения бойка. После прекращения подачи масла
через сопла' происходит обратная посадка бойка за счет вытекания ч|
масла через отверстие в заглушке 7.
Бойки настроены на срабатывание при частотах вращения 55,5
и. 80 с~
f
i|f
Щ [ .
Конструкция ЙБ кольцевого типа представлена на рис. 24 £2).
Автомат безопасности также крепится на специальном валике к концу
ротора турбины. В расточке валика установлен направляющий шток 2,
который с помощью резьбового соединения жестко связан с кольцом 1.
На шток 2 передается усилие пружины ЧЦкоторая неподвижным концом
опирается на втулку 3, а подвижным;! на втулку
6,которая
насажена
на шток 2. Кольцо 1 имеет эксцентриситет центра масс г. за счет
которого на него действует центробежная сила. При достижении
частоты срабатывания иток 2 вместе с кольцом 1 смещается в
направлении увеличения эксцентриситета лг. На рис.24 это положение
кольца изображено штриховой линией. Кольцо 1 после смещения
производит удар по промежуточным элементам защити.
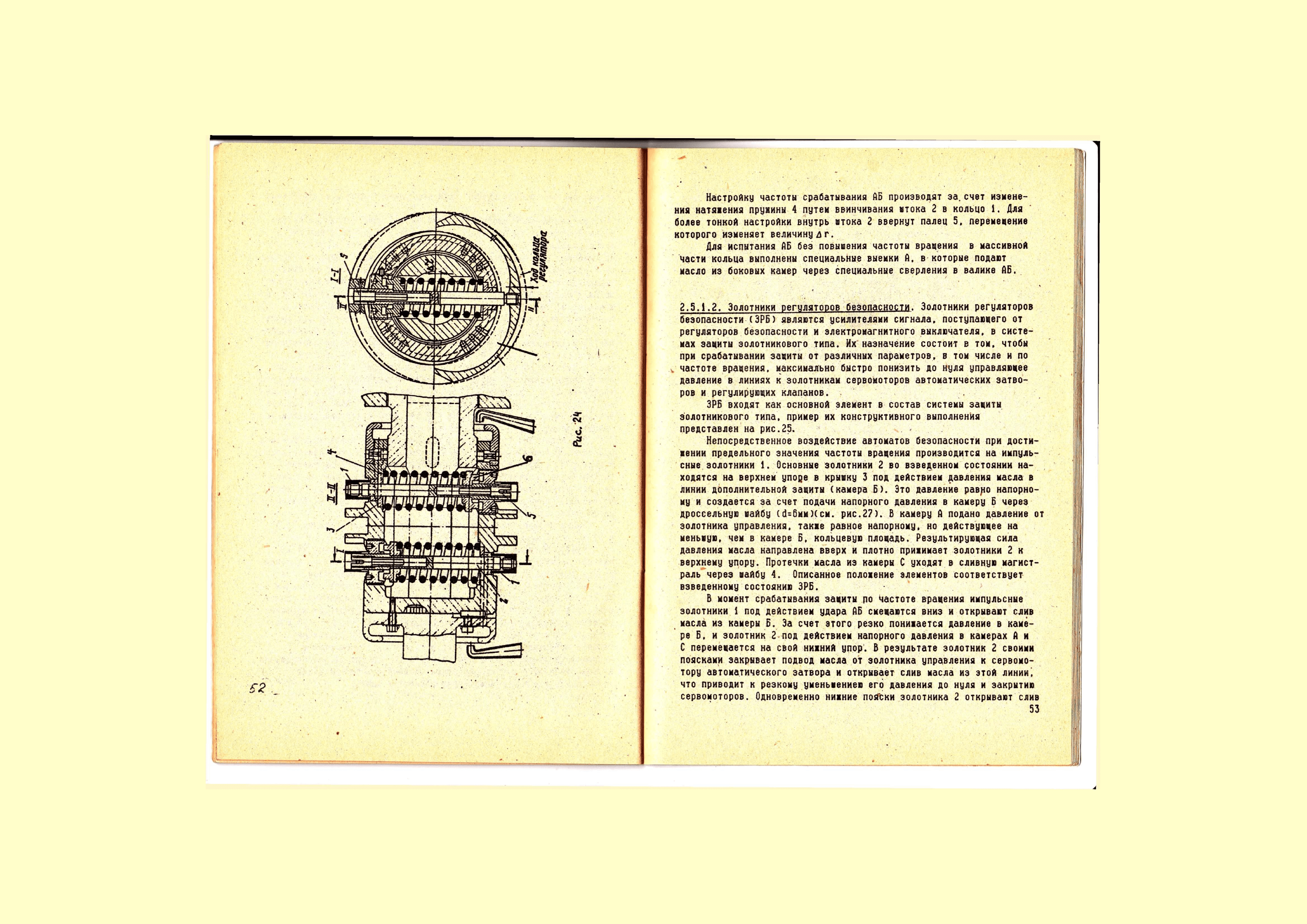
Настройку частоты срабатывания
ЙБ
производят
за.
счет изыене-
ния натяжения пружины
4
путем ввинчивания штока
2 в
кольцо
1. Для
более тонкой настройки внутрь штока
2
ввернут палец 5,йПеремещение
которого изменяет величину
л
г* Щ
Для испытания
ЙБ без
повышения частоты вращения
в
массивной
части кольца выполнены специальные выемки
А\ в
которые подают
масло
из
боковых камер через специальные сверления
в
валике
АБ.
2.5.1.2.
Золотники оеАдтотов б!|1^сности. Золотники регуляторов
безопасности (ЗРБ) являются усилителями сигнала, поступающего
от
регуляторов безопасности
и
электромагнитного выключателя,
в
систе-
мах защиты Золотникового
типа&ЛяС
назначение состоит
в
том, чтобы
при срабатывании защиты
от
различных параметров,
в той
числе
и по
v
частоте вращения, максимально быстро понизить
до
нуля управляющее
давление
в
Линиях
к
золотникам сервомоторов автоматических затво-
ров.^.и,
регулир^щих; клапанов.
Illll
"r-^i;, ||
ЗРБ входят
как
основной элемент
в
состав системы защиты
золотникового типа, пример
их
конструктивного выполнения
представ
лщна;
рис
,2Щ
ШШ^ШШ
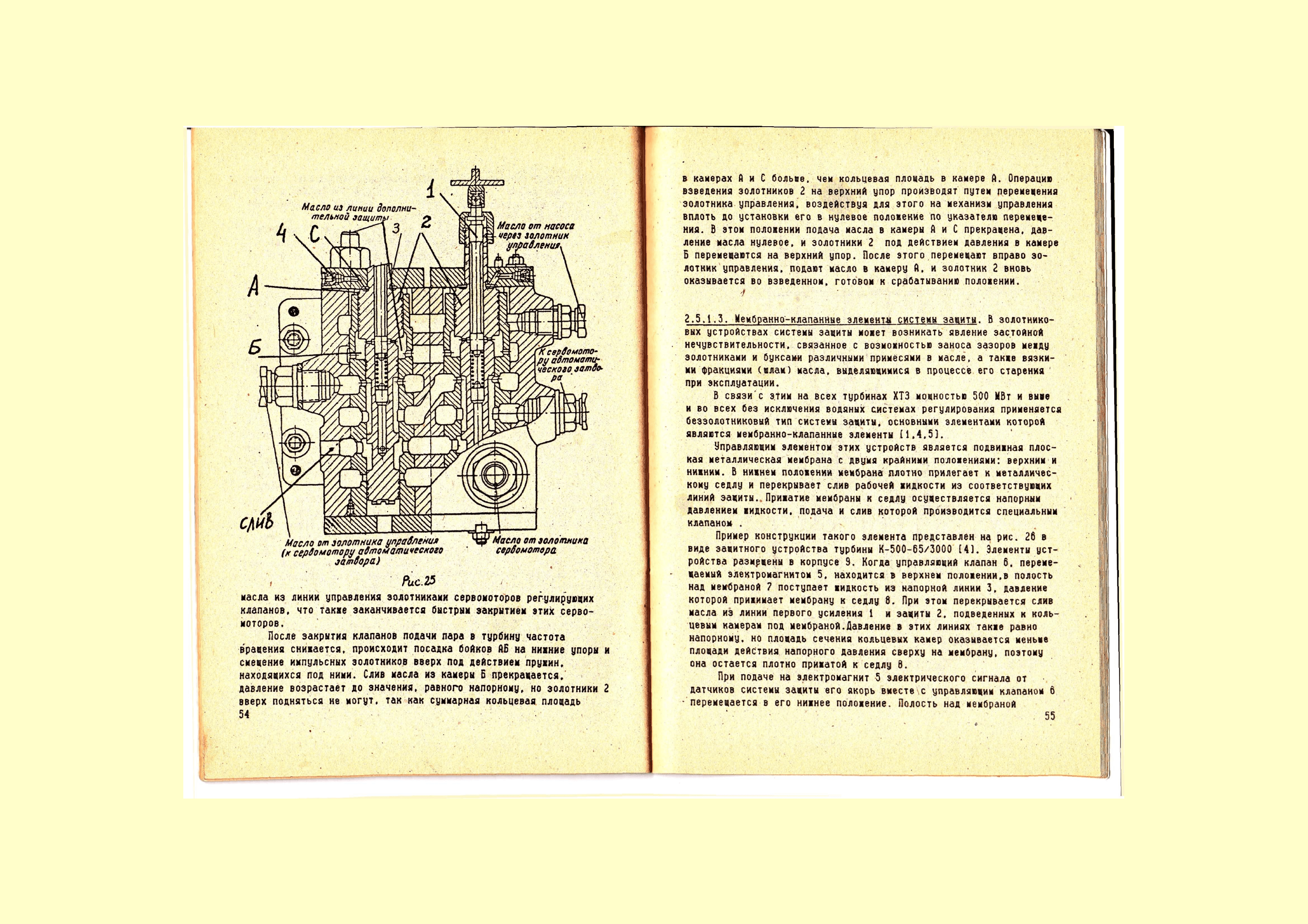
Непосредственное воздействие автоматов безопасности
при
дости-
жении предельного значения частоты вращения производится
на
импуль-
сные золотники
1^Основные
золотники
2 во
взвешенной состоянии
на-
едятся
на
верхнем упоре
в
крышку
3 под
действием давления масла
в
линии дополнительной защиты (камера
Б).
Это
давление равро напорно-
му::!
создается
за
счет;-подачи напорного давления
в
камеру
Б
через
дроссельную шайбу (d=6ммНем. рис.2?Г.
В
камеру
А
подано давление
от
золотника управления, такие равное напорному,
но
действующее
на
меньшую,
чем в
камере
В,
кольцевую площадь./результирующая сила
давления масла направлена вверху плотни приминает золотники
2 к
верхнему упору. Протечки масла
из
камеры
С
уходят
в
сливную магист-
раль"через шайбу
4.
Описанное положение элементов соответствует
взведенному состоянию
3P||fff
1§1 Ш
В момент срабатывания защиты
по
Частоте вращения иыпульсные
золотники
1 под
действием удара
ЙБ
смещаются вниз
и
открывают слив
масла
из
камеры
Б^
За счет; этого резко Понижается давление
в
капе-
ре
5, и
золотник
2 под
действием* напорного давления
в
камерах
й и
С перемещается
на
свой нижний упор.
В
результате золотник
2
своими
поясками закрывает подвод масла^от золотника управления
к
сервомо-
тору автоматического затвора
и
открывает слив наела
из
этой линии',
что приводит
к
резкому уменьшением
его
давления
до
нуля
и
закрытию
сервомоторов. Одновременно нижние поярки золотника
2
открывают слив
§j
Масло
от
насоса
KJtwfii*золотник
тленил
К сервомото*
ру
автомати-
ческого
зато*
Масло
от
золотника упрфленим
(к сервомотору^ЩтатщМШсцо^а
Щ
затвора)
ШШШШ
Масло
от золотника
сервомотора
V,-^i
•it^f'^й-
\»
J
;i
'^'d^^
масла из линии управления золотниками сервомоторов регулирующих
клапанов|^что Также заканчивается быстрым закрытием этих серво-
моторов
.
"Ш:<^^-^^
?Ш!
. После
закрытия--
клапанов подачЦпара
вращения снижается, происходит посадка бойков ЛБ на нижние упоры
и
смещение импульсных золотников вверх под действием пружин,
находящихся под ними. Слив масла из камеры
Б
прекращается,
давление возрастает до значения, равного:|»апорному;|^золотники
2
вверх подняться не могут, так как суммарная кольцевая площадь
5*
Ш
iieiiiiail
ш
в камерах
А и С
большеJ|чем кольцевая площадь
в
камере А. Операцию
взведения золотников
2
на верхний упор производят путем перемещения
золотника управлений! воздействуя для этого на механизм управления
вплоть до установки его
в
нулевое положение по указателю перемеще-
ния.
В
этом положении подача масла
в
камеры
А и С
прекращена,
дав-
ление масла нулевое,
и
золотники
2
под действием давления
в
камере
Б перемещаются на верхний упор. После этого перемещают вправо зо-
лотник управления, подают масло
в
камеру А,
и
золотник
2
вновь
оказывается во взведенном, готовом
к
срабатыванию положении.
I щ щ
2.5.1.3.
Мембранно-клапанные элемента системы зажиты.
В
золотнико-
вых устройствах системы защиты может возникать явление застойной
нечувствительностиД связанное
с
возможностью заноса зазоров между
золотниками
и
буксами различимый'примесями
в
масле,
а
также вязки-
ми фракциями (шлам) масла, выделяющимися
в
процессе его старения '
при эксплуатации.
В связи'с этим на всех турбинах ХТЗ мощностью 500 МВт
и
выше
и во всех без исключения водяных системах регулирования применяется
беззолотниковый тип системы защиты, основными элементами которой
являются мембранно-клапанные элементы
[1,4.5].
Управляющим элементом этих устройств является подвижная плос-
кая металлическая
мембрана-Щ
двумя крайними положениями: верхним
и
нижним.
В
нижнем положении мембрана плотно прилегает
к
металличес-
кому седлу
и
перекрывает слив рабочей жидкости из соответствующих
линий защиты.. Прижатие мембраны
к
седлу осуществляется напорный
давлением жидкости, подача
и
слив которой производится специальным
клапаном
.
Пример конструкции такого элемента представлен на рис. 26
в
виде защитного устройства турбины К-500-65/3000
(4).
Элементы
уст-
ройства размещены
в
корпусе 9. Когда управляющий клапан 6. переме-
щаемый электромагнитом 5, находится
в
верхнем положении.в полость
над мембраной
7
поступает жидкость из напорной линии 3. давление
которой прижимает мембрану
к
седлу 8. При этом перекрывается слив
масла из линии первого усиления
1 и
защиты 2. подведенных
и
коль-
цевым камерам под мембраной.Давление
в
этих линиях также равно
напорноыу. но площадь сечения кольцевых камер оказывается меньше
площади действия напорного давления сверху на мембрану, поэтому
она остается плотно прижатой
к
седлу
8.
При подаче на электромагнит
5
электрического сигнала от
датчиков системы защиты его якорь вместе\с управляющим клапаном
6
•
перемещается
в
его нижнее положение. Полость над мембраной
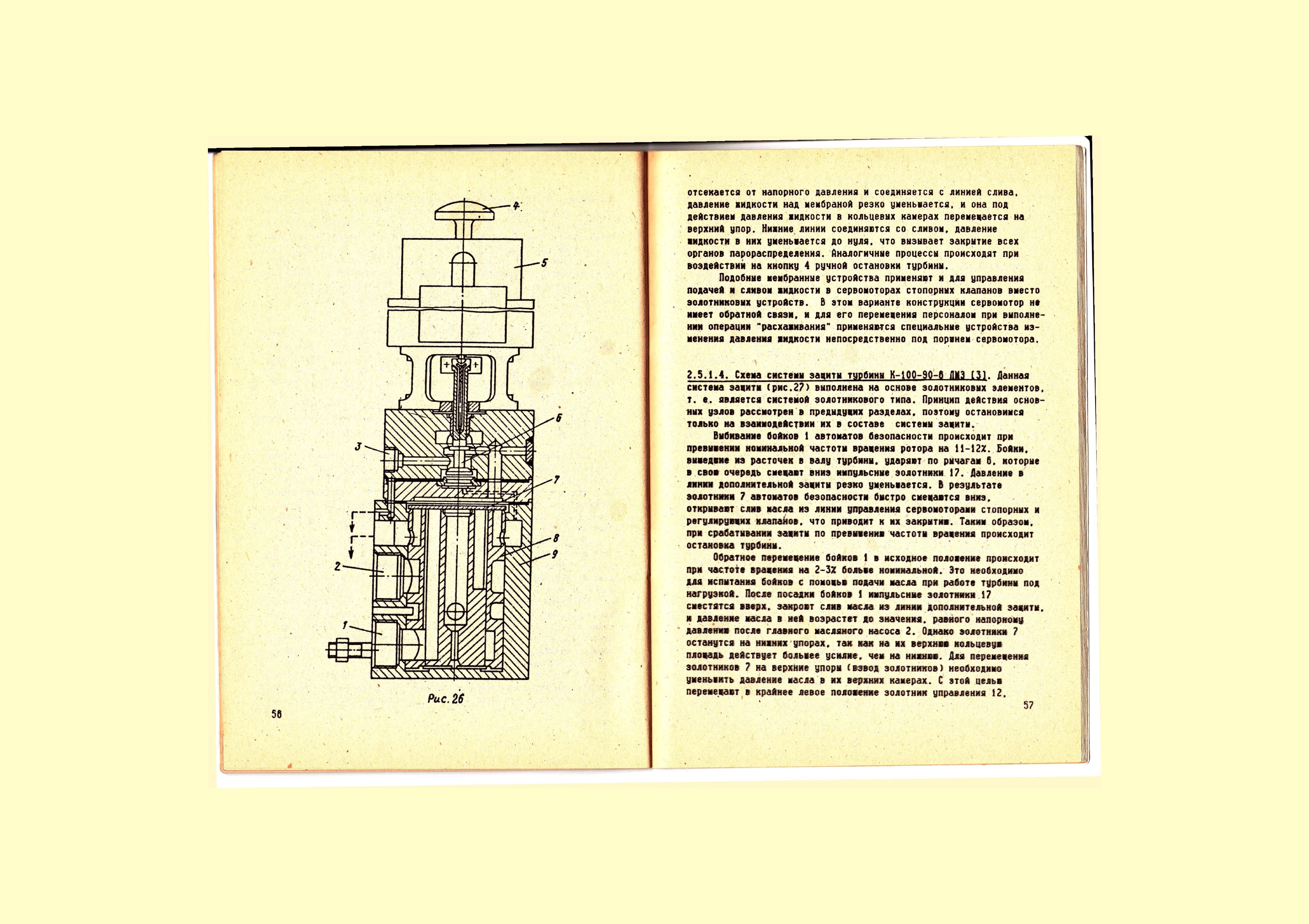
отсекается от напорного давления и соединяется с линией слива,
давление жидкости над мембраной резко уменьшается, и она под
действием давления жидкости в иольцевых камерах перемещается на
верхний упор.
Нижние,
линии соединяются со сливом, давление
жидкости в них уменьшается до нуля, что вызывает закрытие всех
органов парораспределения. Аналогичные процессы происходят при
воздействии на кнопку 4 ручной остановки турбинм.
Подобные мембранные устройства применяют и для управления
подачей и сливом жидкости в сервомоторах стопорных клапанов вместо
золотниковых устройств. В этом варианте конструкции сервомотор не
имеет обратной связи, и для его перемещения персоналом при выполне
нии операции "расхаживания" применяются специальные устройства из
менения давления яидиости непосредственно под поршней сервомотора.
2.5.1,4.
Схема системы защити турбины К100906 ЛИЗ £31. Данная
система защити (рис.2?) выполнена на основе золотниковых элеиентов,
т. е. является системой золотникового типа. Принцип действия основ
ных узлов рассмотрен в предыдущих разделах, поэтому остановимся
только на взаимодействии их в составе системы защиты.
Внбиванме бойиов 1 автоматов безопасности происходит при
превыменим номинальной частотм вращения ротора на
1112*.
Бойки,
вышедшие из расточек в валу турбины, ударяют по рычагам б. иоторме
в свою очередь смещают вниз импульсные золотники 17. Давление в
линии дополнительной защити реэио уменьшается. В результате ||§|
золотники 7 автоматов безопасности бистро смещается вниз.
открывают слив масла из линии управления сервомоторами стопорных и
регулирующих клапанов, что приводит и их закрытие. Таким образом,
при срабатывании защити по превышению частоты вращения происходит
остановка турбины. Ц|
Обратное перемещение бойков 1 в исходное положение происходит
при частоте вращения на 23* больше номинальной. Это необходимо
дли испытания бойкое с помощью подачи масла при работе турбины под
нагрузкой. После посадим бойиов 1 иипульснне золотники 17
сместятся вверх, закроет елке масла из линии дополнительной защити,
и давление масла е ней возрастет до значения, равного напорному
давлении после главного масляного насоса 2. Однако золотники 7
останутся на нижних упорах, так как на их верхние кольцевую
площадь действует больнее усилие, чек на нишиив. Для перемещения
золотников 7 на верхние упоры
С
взвод золотников) необходимо
;
>
4
'
уменьшить давление масла в их верхних камерах. С этой целы
перемещают в крайнее левое положение золотник управления 12.