Инструкция: Типы регуляторов. Методика настройки регуляторов
Подождите немного. Документ загружается.

Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
21
ПРМК.420000.001 И1
2.6 Определение параметров переходных характеристик
Для определения динамических свойств обьекта на практике чаще всего используют методику снятия
переходной характеристики.
При определении динамических характеристик обьекта по его переходной характеристике (кривой
разгона) на вход подается или ступенчатый пробный сигнал или прямоугольный импульс – см.раздел 2.3.
Во втором случае переходная характеристика (кривая отклика) должна быть достроена до
соответствующей кривой разгона.
Процесс получения передаточной функции обьекта, исходя из данных о переходном процессе,
называется идентификацией обьекта.
2.6.1 При снятии переходной характеристики необходимо выполнить ряд условий,
представленных в таблице 2.1:
Таблица 2.1 - Условия снятия переходной характеристики
No Условия
1
Если проектируется система стабилизации технологического параметра, то переходная характеристика
должна сниматься в окрестности рабочей точки процесса.
2
Переходные характеристики необходимо снимать как при положительных, так и отрицательных скачках
управляющего сигнала. По виду кривых можно судить о степени асимметрии обьекта. При небольшой
асимметрии расчет настроек регулятора рекомендуется вести по усредненным значениям параметров
передаточных функций. Линейная асимметрия наиболее часто проявляется в тепловых обьектах
управления.
3
При наличии зашумленного выхода желательно снимать несколько переходных характеристик (кривых
разгона) с их последующим наложением друг на друга и получением усредненной кривой.
4
При снятии переходной характеристики необходимо выбирать наиболее стабильные режимы процесса,
например, ночные смены, когда действие внешних случайных возмущений маловероятно.
5
При снятии переходной характеристики амплитуда пробного входного сигнала должна быть, с одной
стороны, достаточно большой, чтобы четко выделялась переходная характеристика на фоне шумов, а,
с другой стороны, она должна быть достаточно малой, чтобы не нарушать нормального хода
технологического процесса.
Примечание к таблице 2.1: Начальные условия снятия переходной характеристики:
В начальный момент необходимо, чтобы система управления находилась в покое, т.е. регулируемая
величина X (например, температура в печи) и управляющее воздействие регулятора Y (выход регулятора на
исполнительный механизм) не изменялись, а внешние возмущения отсутствовали.
Например, температура в печи оставалась постоянной и исполнительный механизм не изменяет
своего положения. Затем на вход исполнительного механизма подается ступенчатое воздействие, например,
включается нагреватель. В результате состояние обьекта начинает изменяться.
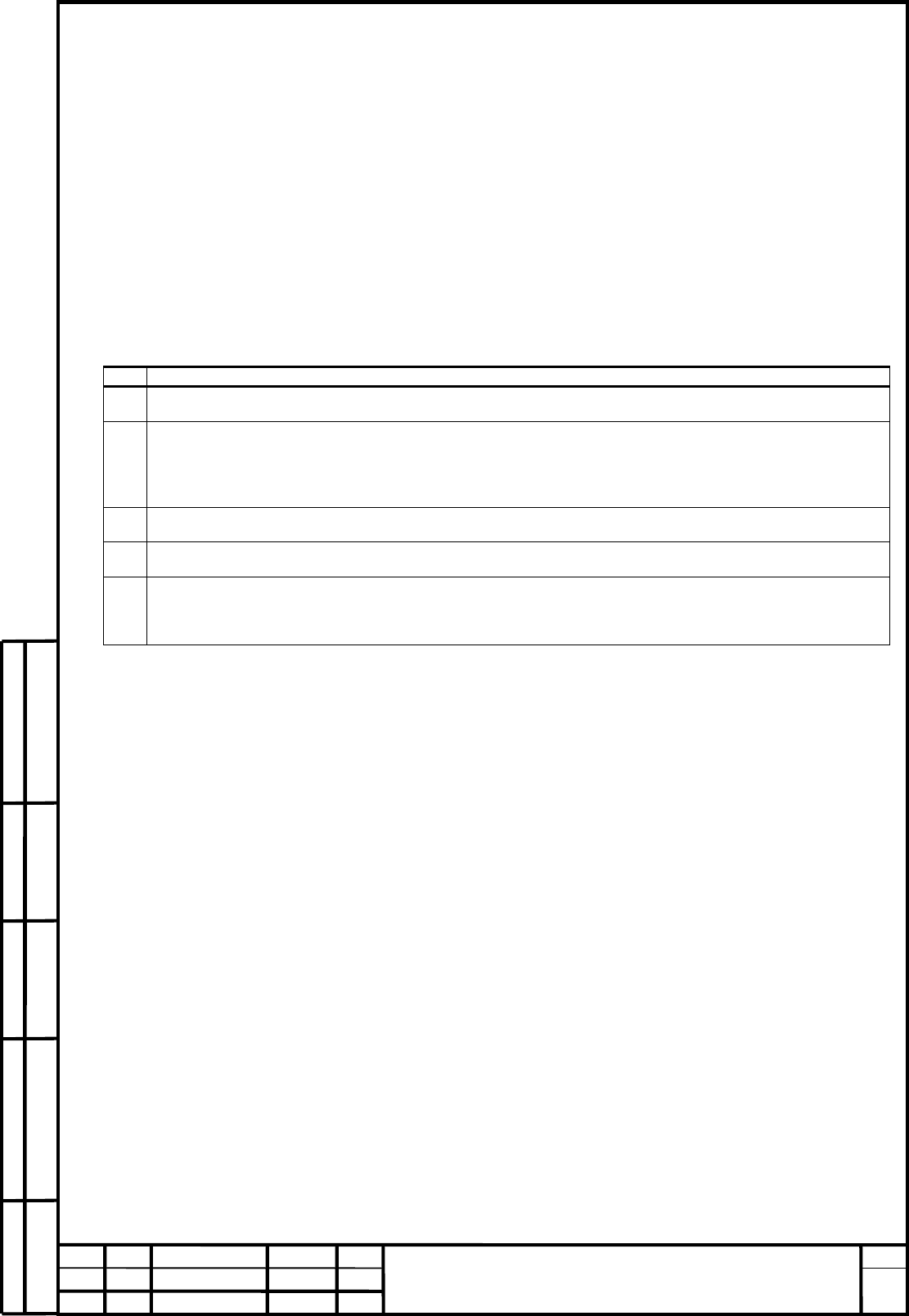
2.6.2 Определение динамических характеристик обьекта управления с самовыравниванием
по его переходной характеристике
Самовыравниванием процесса регулирования называется свойство регулируемого объекта после
нарушения равновесия между притоком и расходом вернуться к этому состоянию самостоятельно, без
участия человека или регулятора. Самовыравнивание способствует более быстрой стабилизации
регулируемой величины и, следовательно, облегчает работу регулятора.
Процесс изменения параметра Х(t) и его переходная характеристика h(t) изображена на рис. 2.5.
Сняв кривую разгона, и оценив характер обьекта управления (с самовыравниванием или без) можно
определить параметры соответствующей передаточной функции.
Передаточную функцию вида (выражение 2.9) рекомендуется применять для обьектов управления с
явно выраженной преобладающей постоянной времени. Перед началом обработки переходную
характеристику (кривую разгона) рекомендуется пронормировать (диапазон изменения нормированной
кривой от 0 до 1) и выделить из ее начального участка величину чистого временного запаздывания.
ПРИМЕР. При подаче на вход некоторого обьекта ступенчатого воздействия была получена
переходная характеристика (см. пример на рис. 2.5). Требуется определить параметры переходной
характеристики.
Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
22
ПРМК.420000.001 И1
Определение динамических характеристик обьектов по кривой разгона производится методом
касательной к точке перегиба переходной характеристики (кривой разгона).
В данном случае точка перегиба соответствует переходу кривой от режима ускорения к режиму
замедления темпа нарастания выходного сигнала.
Рисунок 2.5 - Переходная характеристика (кривая разгона) обьекта с самовыравниванием
По виду переходной характеристики можно определить динамические свойства объекта:
К, Хуст, τ
ττ
τ
d
, Т, R.
1) Динамическим коэффициентом усиления называется величина, показывающая, во сколько раз
данное звено усиливает входной сигнал (в установившемся режиме), и равна отношению величины
технологического параметра Хуст в установившемся режиме к выходной величине У:
Хуст
К =
У
(2.12)
Коэффициент усиления объекта К для объектов с самовыравниванием является величиной,
обратной коэффициенту самовыравнивания (К = 1/с).
2) Установившееся значение выходной величины Хуст - это значение Х при t → ∞. Например,
максимальное значение температуры в печи, которое может быть достигнуто при установленной мощности
нагревателя.
3) В системах автоматического регулирования, после получения возмущающего воздействия
регулируемый параметр изменяется не мгновенно, а через некоторое время. Это время называется
запаздыванием τ
d
процесса в объекте. Различают емкостное и транспортное (передаточное) запаздывание.
Емкостное запаздывание зависит от емкости объекта регулирования. Паровой котел - по уровню
воды в барабане, например, обладает емкостным запаздыванием.
Транспортным (динамическим) запаздыванием τ
d
называется промежуток времени от момента
изменения входной величины У до начала изменения выходной величины Х. Например, это может быть
время после включения нагревателя, за которое температура в печи достигнет значения ≈0,1Хуст.
Чем больше, время полного запаздывания τ
d
- тем труднее регулировать такой процесс. Из наиболее
часто регулируемых параметров наибольшим - запаздыванием обладают объекты, в которых регулируется
температура, а наименьшим - объекты, в которых поддерживается расход жидкости.
4) Постоянная времени обьекта Т может быть определена в соответствии с рис.2.5. Постоянная
времени обьекта достаточно точно может быть определена как время, за которое температура достигнет
значения 0,63*Хуст минус τ
d1
, т.е.:
Т = τ
0,63
- τ
d1
(2.13)
5) Максимальная скорость изменения параметра R - наклон переходной характеристики, может
быть определено по формуле:
R = Xуст / Т (2.14)
Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
23
ПРМК.420000.001 И1
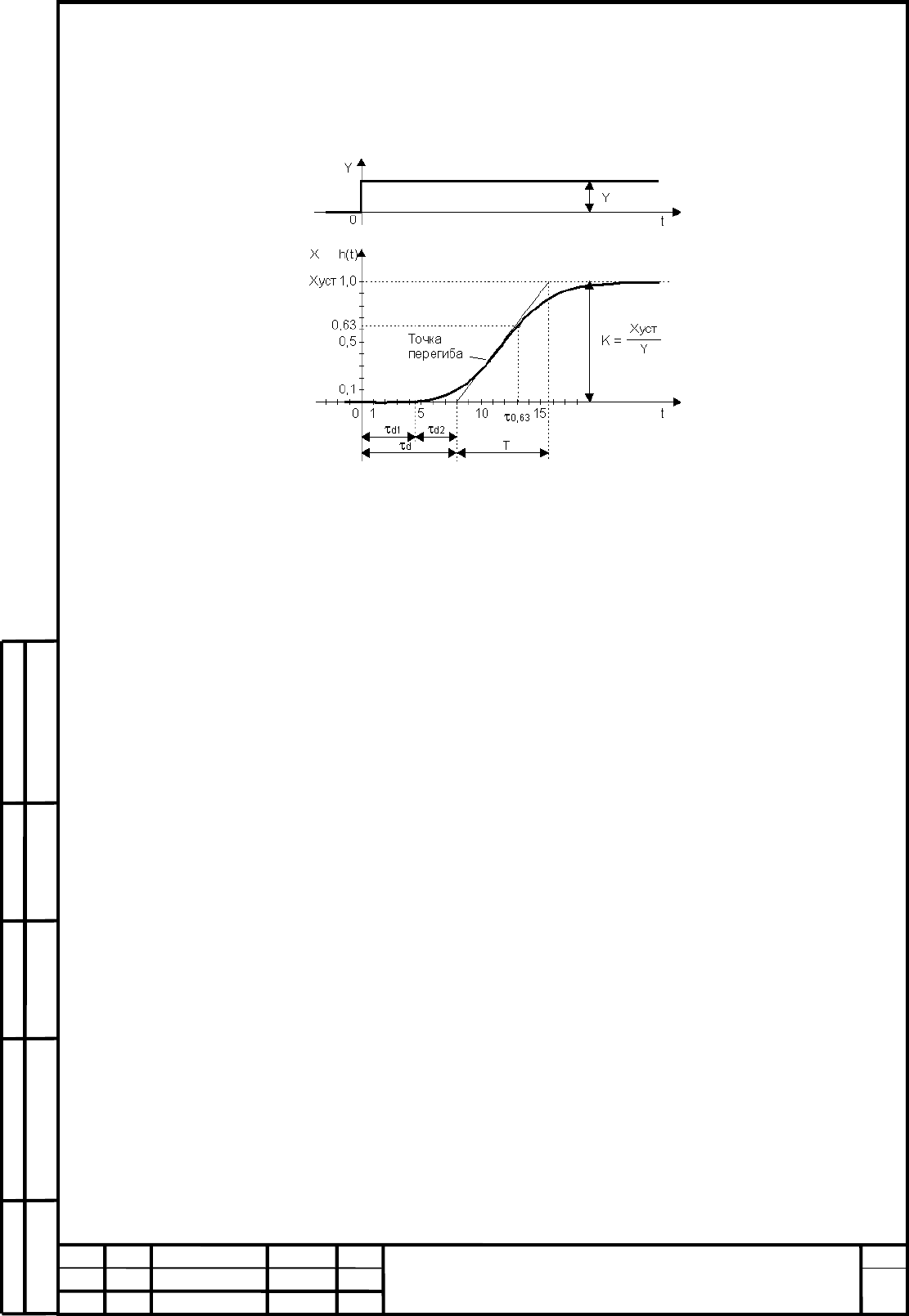
2.6.3 Определение динамических характеристик обьекта управления без самовыравнивания
по его переходной характеристике
Рисунок 2.6 - Переходная характеристика (кривая разгона) обьекта без самовыравнивания
Для обьектов без самовыравнивания устойчивое функционирование системы без регулятора
невозможно.
Для объекта без самовыравнивания коэффициент усиления определяется как отношение
установившейся скорости изменения выходной величины Х к величине скачка входного сигнала У:
Дh / Дt
К =
У
(2.15)
Величина динамического запаздывания τ
d
в объекте определяется так, как показано на рис.2.6.
Для регуляторов с релейным выходом на объект подается 100% мощности. В ряде случаев
длительное воздействие такой мощности недопустимо. В этом случае допускается выключение
нагревательного элемента после определения τ
d
и R.
При этом скорость изменения температуры достаточно точно можно определить после достижения
величиной Х значения ≈0,3Хуст. Тогда скорость изменения температуры R и постоянная времени Т
определяются по формулам:
R = Дh / Дt (2.16)
Т = Хуст / R (2.17)
2.7 Типовые процессы регулирования
При настройке регуляторов можно получить достаточно большое число переходных процессов,
удовлетворяющих заданным требованиям. Таким образом, появляется некоторая неопределенность в
выборе конкретных значений параметров настройки регулятора. С целью ликвидации этой неопределенности
и облегчения расчета настроек вводится понятие оптимальных типовых процессов регулирования.
Выделяют три типовых процесса регулирования:
1. Апериодический процесс с минимальным временем регулирования.
2. Процесс с 20%-ным перерегулированием.
3. Процесс, обеспечивающий минимум интегрального критерия качества.
Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
24
ПРМК.420000.001 И1
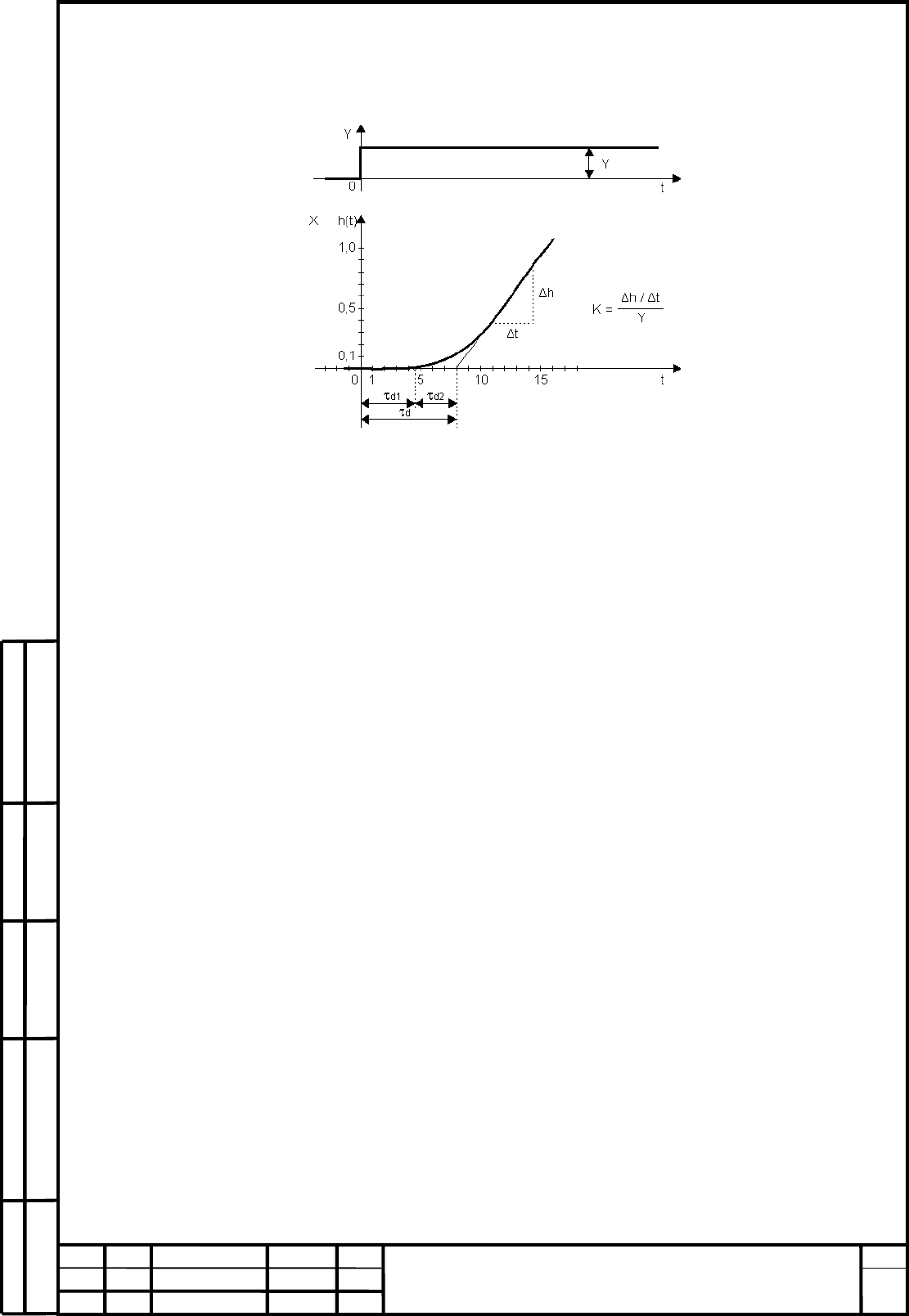
2.7.1 Апериодический переходной процесс с минимальным временем регулирования (см.
рис. 2.7).
Этот типовой процесс (см. рис. 2.7) предполагает, что отрабатывается возмущение Z (система
автоматической стабилизации).
В данном случае настройки регулятора подбираются так, чтобы время регулирования t
p
было
минимальным.
Данный вид типового процесса широко используется для настройки систем, не допускающих
колебаний в замкнутой системе регулирования.
Рисунок 2.7 - График апериодического переходного процесса,
где Ер - ошибка регулирования, t - время.
2.7.2 Переходной процесс с 20%-ным перерегулированием и минимальным временем первого
полупериода (см. рис. 2.8).
Такой процесс наиболее широко применяется для настройки большинства промышленных САР, т.к.
он соединяет в себе достаточно высокое быстродействие t
1
= min при ограниченной колебательности у = 20%.
Рисунок 2.8 - График переходного процесса с 20%-ным перерегулированием
где Ер - ошибка регулирования, t - время.
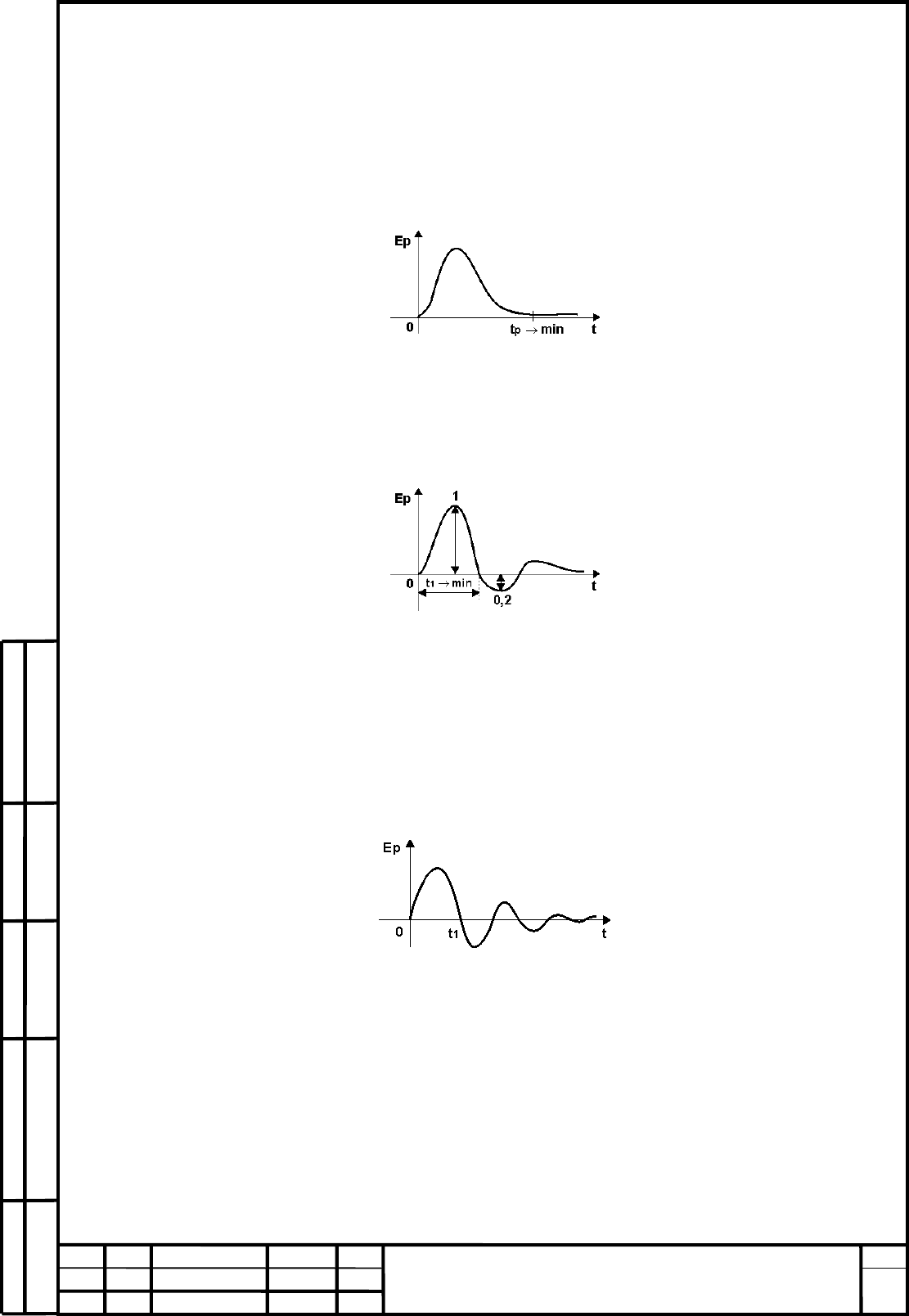
2.7.3 Переходной процесс, обеспечивающий минимум интегрального критерия качества (см.
рис.2.9).
Интегральный критерий качества выражается формулой:
∞
Jmin =
∫
Ep
2
(t)dt → min
0
(2.18)
Рисунок.2.9 - График переходного процесса по минимуму интегрального критерия качества
где Ер - ошибка регулирования, t - время.
К достоинствам этого процесса можно отнести высокое быстродействие (1-й полуволны) при
довольно значительной колебательности. Кроме этого, оптимизация этого критерия по параметрам настройки
регулятора может быть выполнена аналитически, численно (на ЭВМ) или путем моделирования (на АВМ).
Процесс, обеспечивающий минимум интегрального критерия качества, широко применяется при
настройке систем регулирования величины pH - характеризующий кислотность раствора.
Для каждого из трех видов оптимальных процессов разработаны соответствующие
формулы и номограммы для настройки регуляторов на данный процесс.
Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
25
ПРМК.420000.001 И1
2.8 Коэффициенты передачи элементов и блоков САР
Основными элементами САР являются: автоматический регулятор АР, исполнительный механизм
ИМ, объект управления ОУ, датчик Д с преобразователем НП.
Динамика такой системы во многом определяется произведением статических коэффициентов
усиления этих элементов:
К
ОБЩ
= К
АР
* К
ИМ
* К
ОУ
* К
Д
* К
НП
(2.19)
При расчете динамики используются как размерные, так и безразмерные коэффициенты передач.
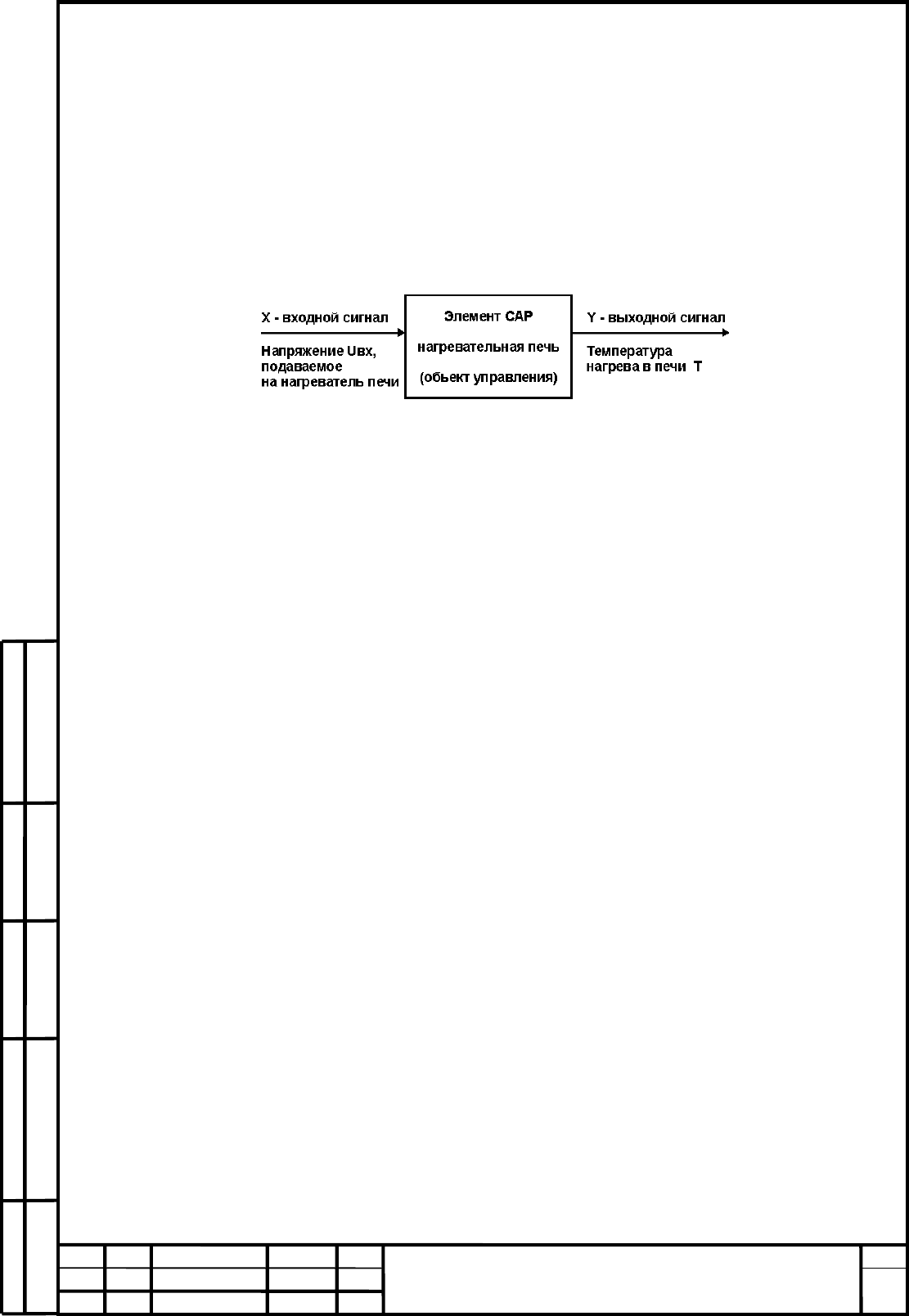
Пример, обьект управления – нагревательная печь, структурная схема приведена на рис. 2.10:
Рисунок 2.10 - Обьект управления – нагревательная печь
2.8.1 Размерные коэффициенты передачи
Размерные коэффициенты передач в предположении линейности статической характеристики
определяются следующим образом:
ДУ
К =
ДХ
(2.20)
где ДХ, ДУ - приращения входного и выходного сигналов в окрестности точки его номинального
режима работы.
Если шкала элемента линейна, то:
Уmax - Уmin
К =
Хmax – Хmin
(2.21)
где Хmax, Хmin, Уmax, Уmin - максимальные и минимальные значения входного и выходного
сигналов элемента.
2.8.2 Безразмерные коэффициенты передачи
Более удобны в применении безразмерные коэффициенты передачи элементов. При их определении
берутся относительные величины приращений:
ДУ / Уном
К =
ДХ / Хном
(2.22)
Например, для нагревательной печи при ДХ=8%, в номинальной точке Хном=70%, приращение
выхода в номинальной точке ДУ=18°С составило Уном=134°С. Тогда по формуле (2.22) имеем:
18 / 134
К = = 1,17
8 / 70
Использование номинальной величины при определении коэффициента передачи рекомендуется в
случае нелинейных статических характеристик систем (элементов) автоматической стабилизации
технологических параметров.
В системах стабилизации расхода выбор нужной расходной характеристики клапана осуществляется
в зависимости от вида нелинейности объекта управления с целью линеаризации его статической
характеристики.

Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
26
ПРМК.420000.001 И1
2.9 Устойчивость систем управления
Важным показателем САР является устойчивость.
Основное назначение САР заключается в поддержании заданного постоянного значения
регулируемого параметра или изменение его по определенному закону.
При отклонении регулируемого параметра от заданной величины (например, под действием
внешнего возмущения или изменения задания) регулятор воздействует на систему таким образом, чтобы
ликвидировать это отклонение.
Если система в результате этого воздействия возвращается в исходное состояние или переходит в
другое равновесное состояние, то такая система называется устойчивой.
Если же возникают колебания со все возрастающей амплитудой или происходит монотонное
увеличение ошибки е, то система называется неустойчивой.
Для того, чтобы определить, устойчива система или нет, используются критерии устойчивости (в
данной методике не рассматриваются):
1) корневой критерий,
2) критерий Стодола,
3) критерий Гурвица,
4) критерий Найквиста,
5) критерий Михайлова и др.
2.10 Показатели качества процесса управления
К системам автоматического регулирования (САР) предъявляются требования не только
устойчивости процессов регулирования. Для работоспособности системы не менее необходимо, чтобы
процесс автоматического регулирования осуществлялся при обеспечении определенных показателей
качества процесса управления.
Если исследуемая САР является устойчивой, возникает вопрос о том, насколько качественно
происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям обьекта
управления.
На практике качество регулирования определяется визуально по графику переходной
характеристики. Однако, имеются точные но более сложные математические методы, дающие конкретные
числовые значения (которые не рассматриваются в данной методике).
Классификация показателей качества состоит из нескольких групп:
● прямые - определяемые непосредственно по переходной характеристике процесса,
● корневые - определяемые по корням характеристического полинома,
● частотные - по частотным характеристикам,
● интегральные - получаемые путем интегрирования функций.
Прямыми показателями качества процесса управления, определяемые непосредственно по
переходной характеристике являются:
1) Установившееся значение выходной величины Yуст,
2) Степень затухания Ψ,
3) Время достижения первого максимума tmax,
4) Время регулирования tp,
5) Ошибка регулирования Ест (статистическая или среднеквадратическая составляющие),
6) Перерегулирование у,
7) Динамический коэффициент регулирования Rd,
8) Показатель колебательности М.
Например, переходная характеристика, снятая на объекте управления при отработке ступенчатого
воздействия, имеет колебательный вид и представлена на рис. 2.11.

Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
27
ПРМК.420000.001 И1
Рисунок 2.11 - Определение показателей качества по переходной характеристике
2.10.1 Установившееся значение выходной величины Yуст
Установившееся значение выходной величины Yуст определяется по переходной характеристике,
представленной на рис.2.11.
2.10.2 Степень затухания Ψ
ΨΨ
Ψ
Степень затухания Ψ определяется по формуле:
А1 – А3
Ψ =
А3
(2.23)
где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной характеристики рис.2.11.
2.10.3 Время достижения первого максимума tmax
Время достижения первого максимума tmax определяется по переходной характеристике,
представленной на рис.2.11.
2.10.4 Время регулирования tp
Время регулирования tp определяется согласно рис.2.11 следующим образом:
Находится допустимое отклонение Д, например, задано Д = 5%Yуст и строится «зона» толщиной 2 Д
(см. рис.2.11). Время tp соответствует последней точке пересечения Y(t) с данной границей. То есть время,
когда колебания регулируемой величины перестают превышать 5 % от установившегося значения.
Настройки регулятора необходимо выбирать так, чтобы обеспечить минимально возможное значение
общего времени регулирования, либо минимальное значение первой полуволны переходного процесса.
В непрерывных системах с типовыми регуляторами это время бывает минимальным при так
называемых оптимальных апериодических переходных процессах. Дальнейшего уменьшения времени
регулирования до абсолютного минимума можно достичь при использовании специальных оптимальных по
быстродействию систем регулирования.
2.10.5 Ошибка регулирования Ест
Статическая ошибка регулирования Ест = Ув - Ууст, где Ув - входная величина (см. рис.2.11).
В некоторых САР наблюдается ошибка, которая не исчезает даже по истечении длительного
интервала времени - это статическая ошибка регулирования Ест. Данная ошибка не должна превышать
некоторой наперед заданной величины.
У регуляторов с интегральной составляющей ошибки в установившемся состоянии теоретически
равны нулю, но практически незначительные ошибки могут существовать из-за наличия зон
нечувствительности в элементах системы.
Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
28
ПРМК.420000.001 И1
2.10.6 Перерегулирование
у
Величина перерегулирования у зависит от вида отрабатываемого сигнала.
При отработке ступенчатого воздействия (по сигналу задания) – см. рис.2.11 величина
перерегулирования у определяется по формуле:
Ymax – Yуст
у = * 100%
Yуст
(2.24)
где значения величин Ymax и Yуст определяются согласно рис.2.11.
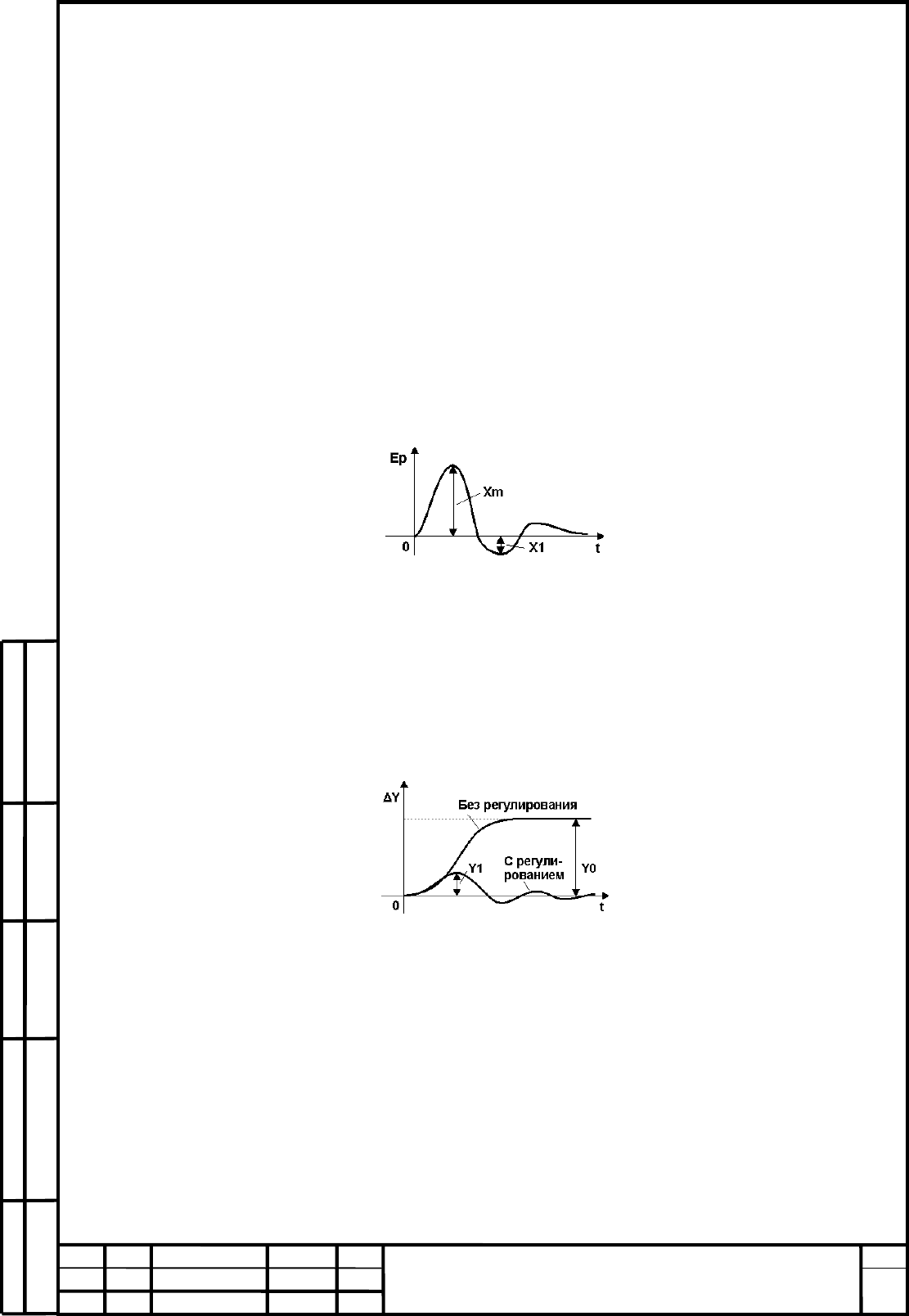
При отработке возмущающего воздействия, величина перерегулирования у определяется из
соотношения:
Х1
у = * 100%
Хm
(2.25)
где значения величин Xm и X1 определяются согласно рис. 2.12.
Рисунок 2.12 - График переходного процесса при отработке возмущения
2.10.7 Динамический коэффициент регулирования Rd
Динамический коэффициент регулирования Rd определяется из формулы:
Y1
Rd = * 100%
Y0
(2.26)
где значения величин Y1 и Y0 определяются согласно рис. 2.13.
Рисунок 2.13 - К понятию динамического коэффициента регулирования
Величина динамического коэффициента Rd характеризует степень воздействия регулятора на
процесс, т.е. степень понижения динамического отклонения в системе с регулятором и без него.
Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
29
ПРМК.420000.001 И1
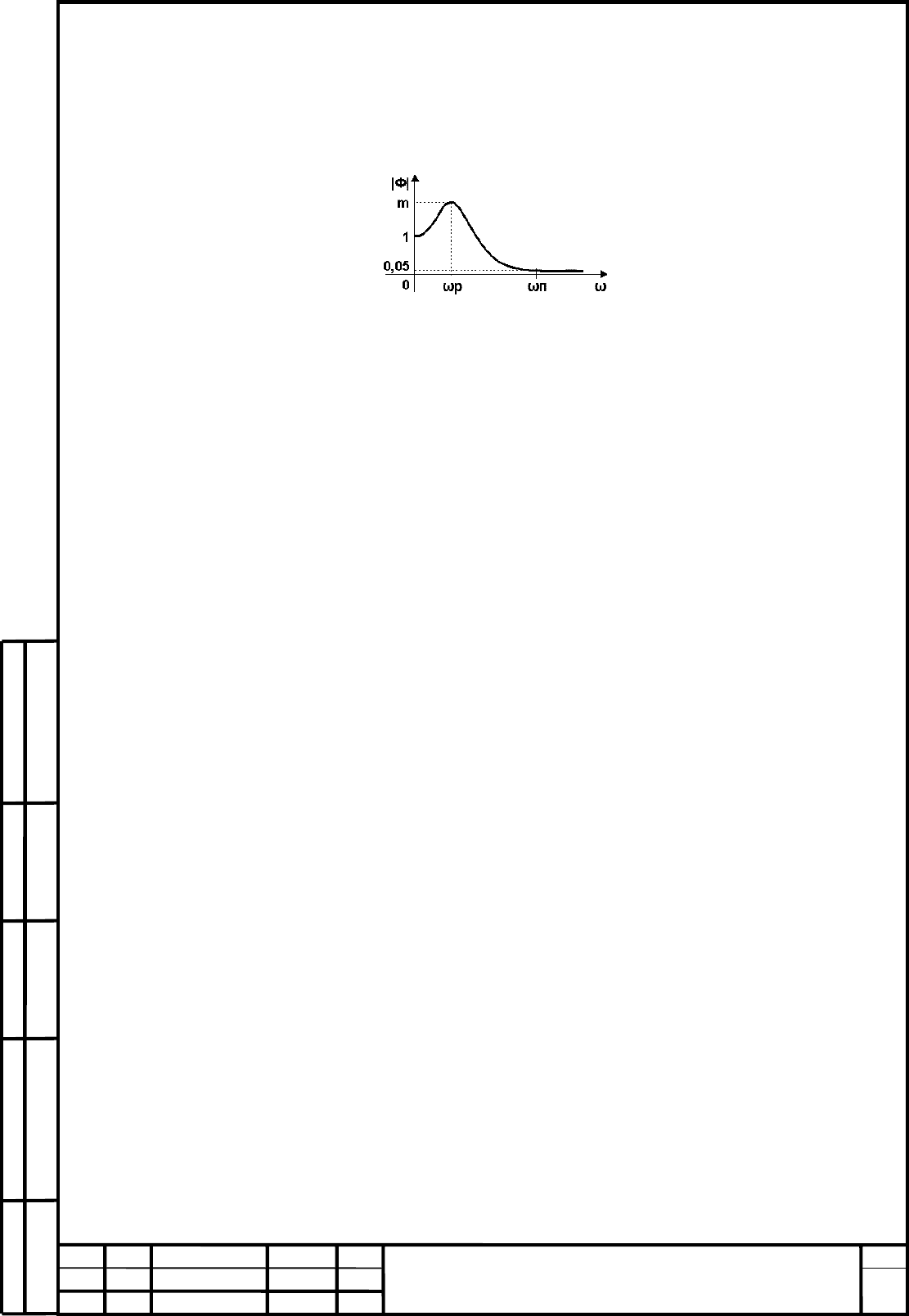
2.10.8 Показатель колебательности М
Показатель колебательности M характеризует величину максимума модуля частотной передаточной
функции замкнутой системы (на частоте резонанса) и, тем самым, характеризует колебательные свойства
системы. Показатель колебательности наглядно иллюстрируется на рисунке 2.14.
Рисунок 2.14 - График модуля частотной передаточной функции замкнутой системы
Условно считается, что значение М=1,5-1,6 является оптимальным для промышленных САР, т.к. в
этом случае у обеспечивается в районе от 20% до 40%. При увеличении значения M колебательность в
системе возрастает.
В некоторых случаях нормируется полоса пропускания системы щп, которая соответствует уровню
усиления в замкнутой системе 0,05. Чем больше полоса пропускания, тем больше быстродействие замкнутой
системы. Однако при этом повышается чувствительность системы к шумам в канале измерения и возрастает
дисперсия ошибки регулирования.

Инв. № докум.
Подп. и дата
Подп. и дата
Взамен инв. № Инв. № дубл.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
30
ПРМК.420000.001 И1
3 ТИПЫ РЕГУЛЯТОРОВ. ЗАКОНЫ РЕГУЛИРОВАНИЯ
В данной главе приводится описание основных типов регуляторов и законов регулирования.
Классификация систем автоматического регулирования (САР) приведена в таблице 1.3 разд.1.3.
В разделах 3.1-3.3 приведены описания алгоритмов работы и законы регулирования релейных
(позиционных) регуляторов. Релейные (позиционные) регуляторы выдают сигнал, который обеспечивает
перемещение регулирующего органа в одно из фиксированных положений (позиций). Их может быть два, три
и более. По количеству позиций различают двух-, трех- и многопозиционные регуляторы.
В разделах 3.4-3.5 приведены описания алгоритмов работы и законы регулирования непрерывных П-,
ПИ-, ПИД-регуляторов.
3.1 Двухпозиционные регуляторы
3.1.1 Назначение. Принцип работы
Двухпозиционные регуляторы обеспечивают хорошее качество регулирования для инерционных
объектов с малым запаздыванием, не требуют настройки и просты в эксплуатации. Эти регуляторы
представляют обычный и наиболее широко распространенный метод регулирования.
Двухпозиционные регуляторы используются для управления переключательными элементами -
дискретными исполнительными устройствами:
● электромеханическими реле,
● контакторами,
● транзисторными ключами,
● симисторными или тиристорными устройствами,
● твердотельными реле и др.
В простейшем случае (без обратной связи) двухпозиционный регулятор работает как
двухпозиционный переключатель.
Например, мощность, подаваемая на нагреватель, имеет только два значения - максимальное и
минимальное (нулевое), две позиции (отсюда и название регулятора - двухпозиционный) - нагреватель
полностью включен или полностью выключен.
Структурная схема двухпозиционной системы регулирования приведена на рис. 3.1.
Рисунок 3.1 - Структурная схема двухпозиционной системы регулирования
где: АР – двухпозиционный регулятор, ОУ – обьект управления, SP – узел формирования заданной точки
(задания), Е – рассогласование регулятора, PV=X – регулируемая величина, У – управляющее
воздействие, Z – возмущающее воздействие.
Для предотвращения «дребезга» управляющего выходного устройства (например, реле) и
исполнительного механизма (например, нагревательного элемента) вблизи задания SP (слишком частого
включения нагревателя), предусматривается гистерезис Н – см. раздел 3.1.3.
Например, описание работы двухпозиционной системы регулирования температуры в печи с
помощью нагревателя, может быть представлено следующим образом:
● Нагреватель включен, пока температура в печи (X=PV) не достигнет значения заданной точки SP.
● Выход регулятора Y (нагреватель) отключается, если регулируемая величина (температура) выше
заданной точки SP.
● Повторное включение нагревателя происходит после уменьшения температуры до значения SP-H,
т.е. с учетом гистерезиса H переключательного элемента.