Имаев Д.Х. Синтез систем управления в среде MATLAB
Подождите немного. Документ загружается.

0 0.5 1 1.5 2 2.5 3 3.5 4
-0.5
0
0.5
1
1.5
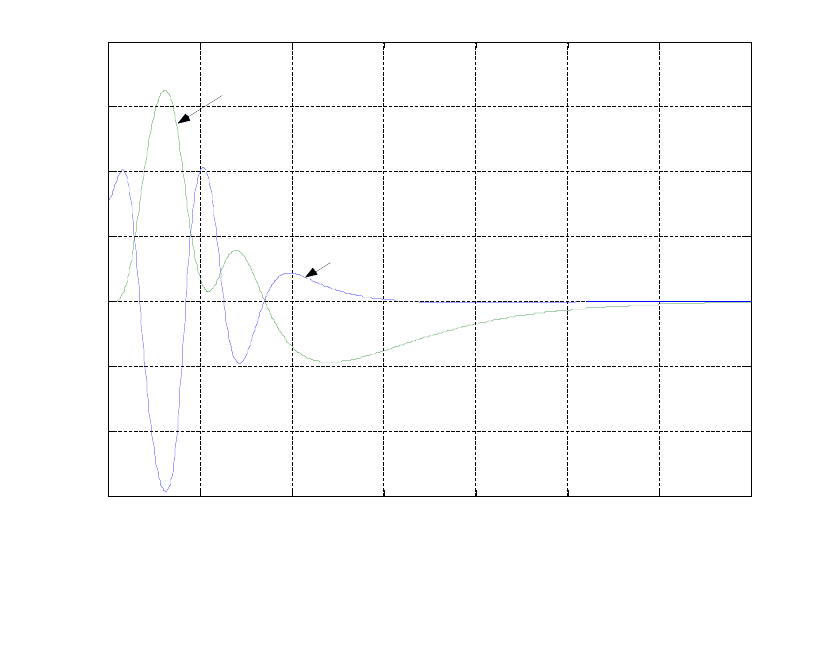
x
theta
Рис.4.13. Процессы в системе с дискретными регуляторами
4.8. Синтез дискретного регулятора по дискретной модели объекта
Подвергнем линейную модель объекта дискретизации для периода
01.0
s
T
с. В случае дискретизации аналогового регулятора, построенного
методом пространства состояний, такой период оказался недопустимо большим.
>> Ts=0.01;
>> dplant=c2d(plant,Ts);
Собственные значения дискретного объекта
>> eig(dplant)
1.0000
1.0000
1.0797
0.9262
связаны с собственными значениями непрерывного объекта
>> eig(plant)
0
0
7.6681
-7.6681
следующим соотношением
)exp(
sii
Tpq
,
где
ii
qp ,
— собственные значения непрерывной и дискретной систем. Известно,
что собственные значения матриц связаны тем же функциональным
соотношением, что и матрицы
)exp(
sd
TAA
,
где
d
A
и
A
— матрицы состояний дискретного и непрерывного объектов.
Как видно из расположения собственных значений, дискретный объект
также неустойчив — двукратное собственное значение на единичной
окружности и одно — вне единичного круга.
Дискретизация не приводит к потере управляемости объекта:
>> [Ad,Bd,Cd,Dd]=ssdata(dplant);
>> rank(ctrb(Ad,Bd))
73
ans =
4
Дискретный регулятор будем синтезировать методом пространства
состояний по заданным собственным значениям системы. Желаемые
собственные значения выберем так, чтобы процессы в дискретной системе не
слишком отличались от соответствующих процессов в непрерывных системах.
При синтезе непрерывной системы были назначены следующие значения
p =
-1
-2
-4
-7
Теперь вычислим собственные значения дискретной системы по команде
>> q=exp(p*Ts)
0.9900
0.9802
0.9608
0.9324
Матрица коэффициентов регулятора состояний дискретной системы
вычисляется так
>> Kd=place(Ad,Bd,q)
Kd =
-0.5327 -11.9367 -1.6167 -1.0110
Аналогично назначим собственные значения дискретного наблюдателя.
Для непрерывного наблюдателя они были следующими:
po =
-5
-10
-20
-35
Для дискретного наблюдателя их вычислим
>> qo=exp(po*Ts)
0.9512
0.9048
0.8187
0.7047
Они принадлежат единичному кругу, но дальше от границы устойчивости
(имеют меньшие модули), что должно обеспечивать быстрейшее затухание
процессов в наблюдателе. Матрицу наблюдателя вычислим так:
>> Ld=place(Ad',Cd',qo)'
0.6264
-27.2384
-206.0671
12.9491
Дискретный динамический регулятор объединяет регулятор состояния и
наблюдатель; его матрицы вычисляются по команде
>> [Ard,Brd,Crd,Drd]=dreg(Ad,Bd,Cd,Dd,Kd,Ld);
>> ddregulator=ss(Ard,Brd,Crd,Drd,0.01);
Последний аргумент команды декларирует период дискретизации.
74
Анализ по линейным дискретным моделям предполагает проверку
собственных значений замкнутой системы
>> dsysc=feedback(dplant,ddregulator);
>> abs(eig(dsysc))
0.4756
0.9104
0.9104
0.9900
0.9802
0.9608
0.9477
0.9324
Можно заметить, что замкнутая система имеет в точности назначенные при
синтезе регулятора собственные значения, но собственные значения
наблюдателя несколько иные.
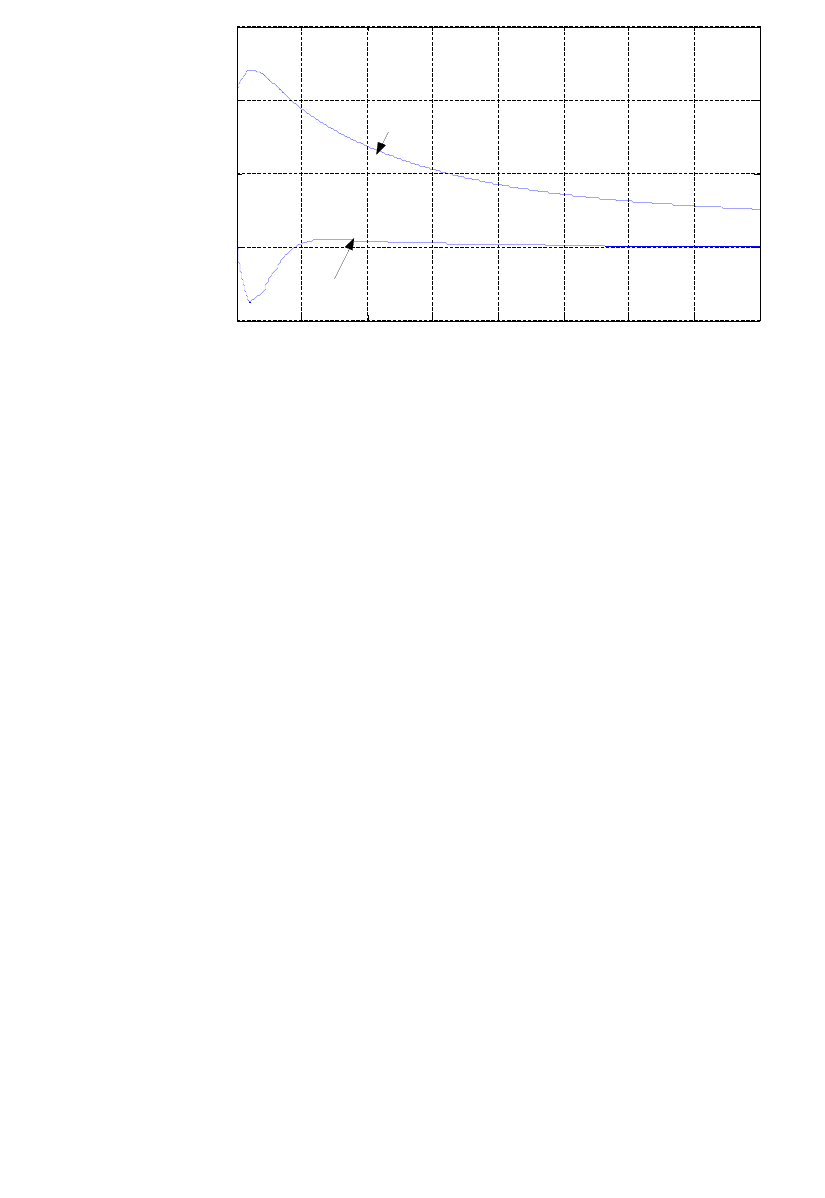
Проведем компьютерную имитацию системы «нелинейный непрерывный
объект+дискретный линейный регулятор» с целью оценки максимальных
отклонений (рис. 4.14).
Получен положительный результат, заключающийся в том, что по
сравнению с дискретизацией аналогового регулятора синтез по дискретной
модели объекта дает желаемый результат для периода дискретизации времени в
десять раз больше.
Попытаемся увеличить периода дискретизации до 0.1 с и повторим процедуры
анализа и синтеза.
>> Ts=0.1;
>> dplant=c2d(plant,Ts);
>> abs(eig(dplant))
1.0000
1.0000
2.1529
0.4645
75
0 1 2 3 4 5 6 7
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
cart
pole
Рис. 4.14. Процессы в системе «нелинейный непрерывный объект+дискретный линейный
регулятор»
01.0
s
T
с (по дискретной модели объекта)
31.0
0
рад
Расположение собственных значений относительно единичного круга
сохраняется. Проверим, является ли дискретный объект управляемым
>> [ad,bd,cd,dd]=ssdata(dplant);
>> rank(ctrb(ad,bd))
4
Дискретизация также сохранила свойство полной управляемости объекта.
Выберем желаемые собственные значения, опираясь на аналоговый
прототип — отобразим их по известной формуле:
>>p =[-1 -2 -4 -7]’;
>> q=exp(p*Ts)
0.9048
0.8187
0.6703
0.4966
Коэффициенты регулятора состояния равны
>> Kd=place(ad,bd,q)
-0.2782 -9.3391 -1.2541 -0.5438
Анализ устойчивости по линейной модели дает те же значения
>> abs(eig(ad-bd*Kd))
0.4966
0.6703
0.8187
0.9048
76

Синтез наблюдателя:
>>po =[-5 -10 -20 -35]’;
>> qo=exp(po*Ts)
qo =
0.6065
0.3679
0.1353
0.0302
Матрицу дискретного наблюдателя вычислим по команде
>> Ld=place(ad',cd',qo)';
Динамический дискретный регулятор
>> [Ard,Brd,Crd,Drd]=dreg(ad,bd,cd,dd,Kd,Ld);
> ddregulator=ss(Ard,Brd,Crd,Drd);
Укажем период дискретизации
>> ddregulator.Ts;
и вычислим собственные значения дискретной замкнутой системы с
динамическим регулятором
>> dsysc=feedback(dplant,ddregulator);
>> abs(eig(dsysc))
6.7923
0.8855
0.8855
0.9048
0.8187
0.6703
0.4966
0.4651
Система не устойчива — одно собственное значение находится вне единичного
круга. Таким образом, период дискретизации
1.0
s
T
с оказывается недопустимо
большим.
Список литературы
1. Анализ и синтез систем управления/ Имаев Д. Х., Ковальски З., Яковлев В. Б.
и др. ― СПб, Гданьск, Сургут, Томск: Информ. Центр Сургутского гос. ун-
та, 1998.
2. Андреев Ю. Н. Управление конечномерными линейными объектами. М.:
Наука, 1976.
3. Андриевский Б. Р. Глобальная стабилизация неустойчивого маятника с
маховичным управлением//УБС, 24 (2009). С. 258-280.
4. Андриевский Б. Р., Фрадков А. Л. Элементы математического моделирования
в программных средах MATLAB 5 и Scilab. ― СПб: Наука, 2001.
5. Аязян Г. К. Расчет автоматических систем с типовыми алгоритмами
регулирования / Уфим. нефт. ин-т. Уфа, 1989.
77
6. Боде Г. Теория цепей и проектирование усилителей с обратной связью. М.:
Иностр. лит-ра, 1948.
7. Вавилов А. А. Структурный и параметрический синтез сложных систем /
ЛЭТИ Л., 1979.
8. Вавилов А. А., Имаев Д. Х. Эволюционный синтез систем управления /
ЛЭТИ Л., 1983.
9. Гришин А. А., Ленский А. В., Охоцимский Д. Е., Панин Д. А., Формальский
А. М. О синтезе управления неустойчивым объектом. Перевернутый
маятник. Известия РАН. Теория и системы управления, № 5, 2002.
10. Изерман Р. Цифровые системы управления. М.: Мир, 1984. С.541.
11. Имаев Д. Х. Дискретные системы управления: Учеб. пособие. — СПб.:
Изд-во СПбГЭТУ”ЛЭТИ”, 2005.– 148 с.
12. Колесников Ал. А. Синергетическое управление системой "Перевернутый
маятник на управляемой тележке"// Тезисы докладов VII Международного
семинара "Устойчивость и колебания нелинейных систем управления".
Москва, ИПУ РАН, 2002 г.
13. Крутько П. Д. Декомпозирующие алгоритмы робастно устойчивых
нелинейных многосвязных систем // Изв. РАН. ТиСУ. 2005. № 1.
14. Крутько П. Д. Робастно устойчивые структуры управляемых систем
высокой динамической точности. Алгоритмы и динамика управления
движением модельных объектов// Изв. РАН. ТиСУ. 2005. № 2.
15. Крутько П. Д., Палош В. Е. Стабилизация состояний равновесия двойного
маятника, нагруженного следящей и консервативной силами// Изв. РАН.
ТиСУ. 2009. № 2. С. 3-17.
16. Медведев В. С., Потемкин В. Г. Control System Toolbox. MATLAB 5 для
студентов. – М.: ДИАЛОГ-МИФИ, 1999.
17. Острем К., Виттенмарк Б. Системы управления с ЭВМ. М.: Мир, 1987.
18. Палош В. Е. Исследование динамики двойного маятника со следящей и
консервативной силами //Изв. РАН. ТиСУ. 2008. № 3.
19. Первозванский А. А. Курс теории автоматического управления. М.:
Наука, 1986.
20. Пошехонов Л. Б. Основы теории управления. Часть 1 – линейные
непрерывные системы: Учеб. пособие. СПб.: Изд-во СПбГЭТУ “ЛЭТИ”,
2006. 92 с.
21. Решмин С. А., Черноусько Ф. Л. Оптимальное по быстродействию
управление перевернутым маятником в форме синтеза // Изв. РАН. ТиСУ.
2006. № 3.
22. Ротач В. Я. Расчет динамики промышленных автоматических систем
регулирования. М.: Энергия, 1973.
23. Теория автоматического управления / Под ред. А. В. Нетушила. М.:
Высш. шк., 1976.
78

24. Теория автоматического управления: учеб. для вузов /С. Е. Душин, Н. С.
Зотов, Д. Х. Имаев и др.; Под ред. В. Б. Яковлева. — М.: Высшая школа,
2005. — 567 с.: ил.
25. Техническая кибернетика. Теория автоматического регулирования / Под
ред. В. В. Солодовникова. М.: Машиностроение, 1967.
26. Федосов Б.Т. Управление неустойчивыми объектами. Обратный маятник .
www . keldysh . ru / papers /2007/ source / prep 2007_20. pdfwww . keldysh . ru / papers /2007/
source / prep 2007_20. pdf
27. Формальский А. М. О стабилизации перевернутого маятника с
неподвижной или подвижной точкой подвеса // ДАН, Т. 406, № 2, 2006. С.
175-179.
28. Формальский А. М. Перевернутый маятник на неподвижном и подвижном
основании // ПММ, Т. 70, № 1, 2006, с. 62-71.
29. Формальский А. М. О стабилизации двойного перевернутого маятника при
помощи одного управляющего момента //Изв. РАН. ТиСУ. 2006. № 3. С. 5-
12.
30. Черноусько Ф. Л. Декомпозиция и синтез управления в динамических
системах // Изв. АН СССР. Техн. кибернетика. 1990. № 6.
31. Честнат Г., Майер Р. Проектирование и расчет следящих систем и систем
регулирования. М.: Госэнергоиздат, 1959.
32. Anderson C. W. Learning to Control an Inverted Pendulum Using Neural
Networks// IEEE Control Systems Magazine. April, 1989. P. 31-36.
33. Cannon R. H. Dynamics of Physical Systems. ― McGraw-Hill, 1967.
34. Demuth H., Beale M. Neural Network Toolbox for Use with MATLAB. The
MathWorks, Inc., Natick, MA, 1994.
35. Driankov D., Hellendoorn H., Reinfrank M. An Introduction to Fuzzy Control.
Berlin, Heidelberg: Springer Verlag, 1993.
36. Furuta K., Okutani T., Sone H. Komputer control of a double inverted
pendulum// Comput. & Elec. Engng. Vol. 5. Pergamon Press Ltd, 1978. P. 67-84.
37. Furuta K., Kajiwara H., Kosuge K. Digital control of a double inverted
pendulum on a inclined rail// Int. J. Control, 1980, vol. 32, No 5. P. 907- 924.
38. Furuta K., Ochiai T., Ono N. Attitude control of a triple inverted pendulum//Int.
J. Control, 1984, vol. 39, No 6. P. 1352-1365.
39. Geva S., Sitte J. A Cartpole Experimental Benchmark for Trainable Controllers//
IEEE Control Systems Magazine. October, 1993. P. 40-51.
40. Górecki H. Optymalizacja systemów dynamicznych. — PWN: Warszawa, 1993.
41. Gulley N., Jang R.J.-S. Fuzzy Logic Toolbox for Use with MATLAB. The
MathWorks, Inc., Natick, MA, 1995.
42. Imajew D., Dudek A., Hajdasz R., Jastrebow W. Modele dynamiczne wzajemne
sprzężonych wahadeł odwróconych jako niestabilnych obiektów
sterowania//Zeszyty naukowe WSI w Opolu. Seria: Elektryka z. 39, Nr kol.
201/1995. S. 5-20.
79

43. 43. Inverted pendulum — Wikipedia, the free encyclopedia.
http://en.wikipedia.org/wiki/Inverted_pendulum
44. Kosko B. Neural Networks and Fuzzy Systems. Englewood Cliffs, NJ: Prentice
Hall, 1992.
45. Mori S., Nishihara H., Furuta K. Control of Unstable mechanical system.
Control of pendulum// Int. J. Control, 1976, vol. 23, No 5. P. 673-692.
46. Nguyen D. H., Widrow B. Neural Networks for Self-Learning Control Systems//
IEEE Control Systems Magazine, April, 1990. P. 18-23.
47. Roberge J. K. The Mechanical Seal/ S. B. Thesis. MIT, Cambridge, MA. May,
1960.
48. Schaefer I.F., Cannon R.H. On the Control of Unstable Mechanical Systems.
IFAC, 3d Congress, London, 1966.
49. Seto D., Baillieul J. Control Problems in Super-Articulated Mechanical Systems//
IEEE Trans. On AC. Vol. 39, NO. 12. December 1994. P. 2442-2452.
50. Sturgen W. R., Loscutoff M. V. Application of modern control and dynamic
observers to control a double inverted pendulum//Proc. of JACC, 1972. P. 857-
865.
51. Szymkat M. Komputerowo wspomaganie w projektowaniu układów regulacji.
— WNT: Warszawa, 1993.
80