Идельчик В.И. Электрические системы и сети
Подождите немного. Документ загружается.

550
Оптимизация
режимов
электроэнергетических систем
Гл. 13
Минимум функции Лагранжа определяется следующей
системой уравнений:
-fh
=-
-4- КК + М^ =
0;
(13.24)
-f-=MP
B
-P = 0. (13.25)
При записи уравнений (13.24) и (13.25) использованы
правила дифференцирования матриц и транспонирования
произведения матриц, известные из матричной алгебры:
—вГ^-=С,
(13.26)
где X
х
—
вектор-сгрока, транспонированная к вектор-столб-
цу X; С — вектор-столбец;
-^=С;
(13.27)
(С
Т
А)
Т
= А
Т
С. (13.28)
Уравнения (13 25)—это уравнения первого закона
Кирхгофа для Р, совпадающие с (13.18). Уравнения (13.24)
можно рассматривать как закон Ома для каждой из ветвей
сети, напряжения в узлах которой равны
Хи-
Покажем, что
уравнения (13.24) и (13 25) эквивалентны уравнениям уз-
ловых напряжений. Для этого выразим из (13 24)
р^-^р^МЧ (13.29)
и, подставив (13.29) в (13.25) и учитывая, что R-
1
==G
B
, по-
лучим
-U
2
S^LMG
B
M
T
3i-P = 0.
2
в
Последнее выражение перепишем с учетом (9.23) так:
^ ном
O
y
l — P = 0, (13.30)
где G
y
— матрица активных собственных и взаимных про-
водимостей узлов. Примем, что напряжения узлов в сети
с г равны множителям Лагранжа, умноженным на
§13
3 Оптимизация распределения активной
мощности
551
и
к
=-К-^.
(13.31)
Тогда (13.30)—это уравнение узловых напряжений
в сети только с г, для которой G
y
— матрица активных уз-
ловых проводимостей, Р — вектор узловых мощностей,
"к — вектор узловых напряжений, деленный на —U
2
UC
J2
р соответствии с (13.31).
Из приведенных выкладок следует, что задача оптими-
}ации потоков Р (13.21), (13.18) сводится к решению уз-
ловых уравнений для сложной сети с активными сопротив-
лениями.
Повторив подобный вывод выражений, можно получить
аналогичный (13.30) результат для сложной сети, в кото-
рой потоки Q не равны нулю.
13.3.
ОПТИМИЗАЦИЯ РАСПРЕДЕЛЕНИЯ АКТИВНОЙ
МОЩНОСТИ МЕЖДУ ТЕПЛОВЫМИ
ЭЛЕКТРОСТАНЦИЯМИ
1
Оптимизация режима электроэнергетической системы по
активной мощности часто решается как самостоятельная
важная подзадача оптимизации режима. Оптимальный ре-
жим соответствует минимуму эксплуатационных затрат на
производство электроэнергии в текущий момент времени.
Переменная часть эксплуатационных затрат (издержек на
производство электроэнергии)—это суммарный расход ус-
ловного топлива на станциях энергосистемы или суммарные
затраты на топливо.
Оптимальный режим соответствует не только минималь-
ному суммарному, но и минимальному удельному расходу
топлива на полезно отпущенный
1
кВт-ч.
В качестве целевой функции выберем суммарные затра-
ты на топливо в энергосистеме.
Каждая k-я станция в энергосистеме характеризуется
расходом топлива в единицу времени, зависящим от значе-
ния генерируемой активной мощности Ви(Рк)- Эта зависи-
мость, вид которой приведен на рис.
13.13,
называется
-U
2
/2, т. е.
ном' '
Перед чтением данного параграфа полезно прочитать
§ 4.4.
552 Оптимизация режимов
электроэнергетических систем
Гл. 13
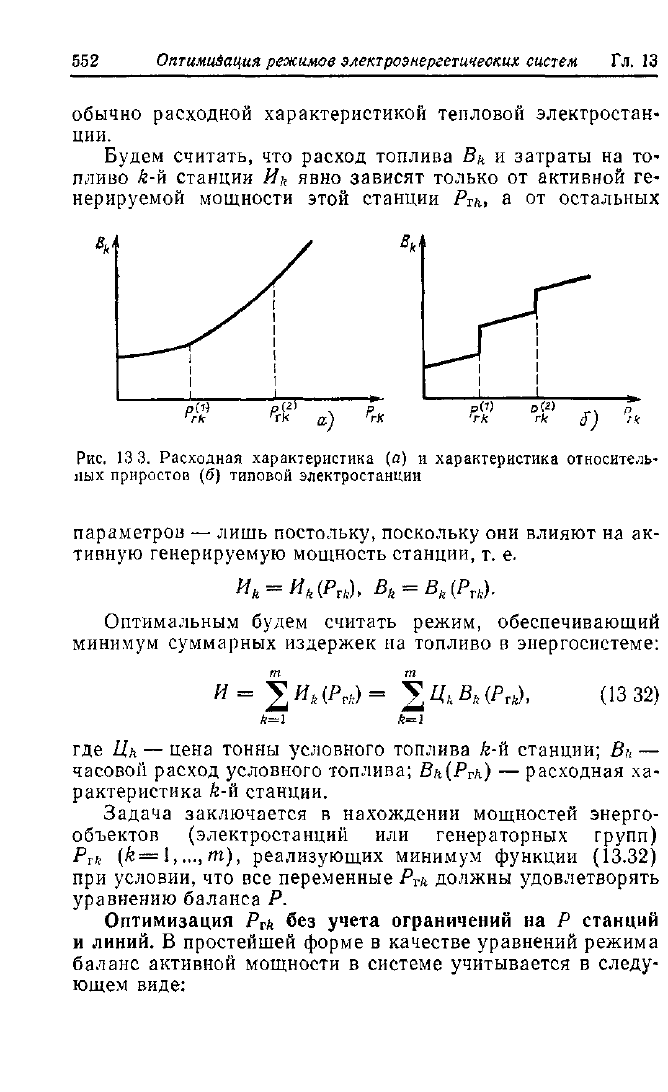
обычно расходной характеристикой тепловой электростан-
ции.
Будем считать, что расход топлива B
h
и затраты на то-
пливо k-й станции #А явно зависят только от активной ге-
нерируемой мощности этой станции Р
г
&, а от остальных
Рис.
13 3. Расходная характеристика (а) и характеристика относитель-
ных приростов (б) типовой электростанции
параметров — лишь постольку, поскольку они влияют на ак-
тивную генерируемую мощность станции, т. е.
H
k
=
H
k
(P
rk
),
B
k
=
B
k
(P
vk
).
Оптимальным будем считать режим, обеспечивающий
минимум суммарных издержек на топливо в энергосистеме:
m m
И=^И
к
(P
rk
) = %Ц
к
В
к
(P
rk
), (13 32)
ft=i
k=i
где Цк — цена тонны условного топлива k-й станции; Bh —
часовой расход условного топлива; Bh(Prk) — расходная ха-
рактеристика k-й станции.
Задача заключается в нахождении мощностей энерго-
объектов (электростанций или генераторных групп)
P?k {k—l,...,m), реализующих минимум функции (13.32)
при условии, что все переменные P
v
u должны удовлетворять
уравнению баланса Р.
Оптимизация Р
т
и без учета ограничений на Р станций
и линий. В простейшей форме в качестве уравнений режима
баланс активной мощности в системе учитывается в следу-
ющем виде:
§ 13 ^Оптимизация распределения активной мощности 553
m я+1
^ Pvk- 2
Я
н*-АР
2
= 0, (13.33)
4=1 ft=l
где
Prh,
Рнн
— соответственно генерируемая и потребляемая
мощности в узлах энергосистемы; ДРг
•—
потери активной
мощности в системе;
пг
— число электростанций, включая
балансирующую; (я+1)—число узлов в энергосистеме,
|йричем в каждом из них задана постоянная нагрузка Р
В
к-
4
' Оптимизация Р станций при соблюдении баланса Р для
'Системы
в целом без учета потерь мощности соответствует
"И
предположению, что APv и V P
nk
постоянны. Если для це-
k=\
левой функции (13.32) и ограничения (13.33) записать
функцию Лагранжа, то получим следующие условия опти-
мальности:
0Р?к
=—
К
= const, k-= i, ... , m (13.34)
J уравнение баланса (13.33).
Оптимизация Р станций без учета потерь соответствует
равенству частных производных целевой функции (стоимо-
сти топлива) по мощности данной станции при соблюдении
баланса мощностей в системе (13.33). Частная производная
дИъ
—- называется относительным приростом стоимости то-
dP
rh
плива и обозначается е&.
_ дИ
к
_
П
дВк _
Т1
о
dP
rk
dP
vk
|де Цк — цена топлива на k-й станции; p
ft
— относительный
йрирост расхода топлива на й-й станции.
Зависимость относительного прироста Ък от мощности
Может быть получена дифференцированием расходной ха-
рактеристики. Обычно в качестве исходных данных при опт
тимизации принимаются именно эти зависимости, называе-
мые иногда дифференциальными расходными характеристи-
ками или характеристиками относительных приростов.
Пример такой характеристики приведен на рис. 13.3,6. Эги
зависимости из-за наличия изломов в расходных характери-
стиках обычно имеют разрывы первого рода (на рис. 13.3,6
в точках Р<|> иР$>).
554 Оптимизация режимов
электроэнергетических систем
Гл. 13
Оптимизация Р станций при соблюдении баланса Р для
системы в целом с учетом потерь мощности, т. е. задача
(13.32),
(13 33) при учете зависимости потерь
ДРЕ
ОТ
мощ-
ностей станций Р
г
;
!;
также решается по методу Лагранжа.
В эгой задаче для всех станций, кроме балансирующей, ус-
ловие оптимальности (13.34) заменяется на следующее:
dH
h
— =
Sfe
=—
%
— const при k = 1, ... , m— 1,
<5ДЯ
2
1 —
a
h
1
~~дР^~
(13.35)
дАР„
где Oft= относительный прирост потерь мощности
k-й станции.
При использовании метода коэффициентов потерь (или
матрицы В) частные производные потерь по активной мощ-
ности
Oh
определяются как линейные функции активных ге-
нерируемых мощностей узлов P
Tk
.
Учет технических ограничений по активной мощности
станций и линий состоит в том, что определяемые в резуль-
тате оптимизации мощности станций должны быть в допу-
стимых пределах, а мощности линий меньше их пропускных
способностей с учетом запаса. В этом случае при оптими-
зации Р станций надо учитывать не только баланс Р для
системы в целом или для каждого узла, но и ограничения-
неравенства на мощности станций и пропускные способно-
сти линий. При учете этих ограничений-неравенств рас-
пределение Р между станциями становится задачей нели-
нейного математического программирования.
Для оптимизации распределения Р в объединенных
(ОЭС) и районных (РЭУ) энергетических системах при-
меняются расчеты на ЭВМ. Программы расчетов реализуют
оптимизацию суточного режима по Р, т. е. определяют зна-
чения Р для каждой ступени суточного графика, соответст-
вующие минимуму суммарного расхода условного топлива
в течение суток при учете баланса Р в системе (13.33)
и ограничений на мощности станций и линий. Эти програм-
мы используют градиентный метод и штрафные функции
для учета ограничений-неравенств
1
.
1
Например, программы В-2 и В-3, разработанные во Всесоюзном
научно-исследовательском институте электроэнергетики (ВНИИЭ).
§ 13.4
Расчет
допустимых и оптимальных режимов 555
13.4. РАСЧЕТ ДОПУСТИМЫХ И ОПТИМАЛЬНЫХ Р1ЖИМОВ
Расчет установившегося режима. В общей форме урав-
нения установившегося режима записываются гак:
W(X, Y) = 0, (13.36)
где W — вектор-функция; X и
Y —
вектор-столбцы зави-
симых и независимых параметров режима.
Как отмечалось в § 9.4 и 13.1, число уравнений в вы-
ражении (13.36) равно числу зависимых параметров режи-
ма X. Расчет установившегося режима состоит и определе-
нии зависимых переменных X, удовлетворяющих уравнению
установившегося режима (13.36), при заданных значениях
независимых переменных Y. При фиксированном векторе Y
система уравнений (13 36) зависит лишь от X и ее решение
соответствует определению равного нулю минимума функ-
ции
V~2wl(X),
(I3.37)
Тде ш*г(Х)—уравнение установившегося режима для А-го
узла, например уравнение баланса мощности или тока в k-м
узле.
Расчет допустимого режима электрической системы, т. е.
определение режима, у довле творящего условиям надежно-
сти электроснабжения и качества электроэнергии, имеет
важное значение как подзадача оптимизации режима и как
самостоятельная задача, например при отсутствии резерва
мощности. Важнейшая цель при расчетах установившегося
режима состоит в проверке того, удовлетворяет ли рассчи-
танный режим техническим ограничениям по условиям на-
дежности и качества электроэнергии Техническим ограни-
чениям должны удовлетворять модули напряжений генера-
торов и нагрузки, активные и реактивные мощности
генераторов, токи и потоки мощности в линиях и т. д. До-
пустимый режим — это такой, для которого зависимые
и независимые параметры режима X
t
и Y,, а также функции
от них фг(Х, Y) удовлетворяют техническим ограничениям.
Для допустимого режима должны выполняться следующие
условия:
Y
j
m
;n<
Y
J<Yima
X
при / = 1,2, ... , т—2п; (13.38)
*W„ < *t <
Xtmax
П
Р
И l
'= 1. 2, ... , 2«; (13.39)
4>lmin<4>l(X> V<brnax При I = 1, 2 L, (13.4Э)
556 Оптимизация режимов электроэнергетических систем Г л
f3
где фг(Х, Y) —явная вектор-функция от X, Y, компонента-
ми которой могут быть, например, потоки мощности, потери
И Т. Д
;
Yjmax,
X
imax
,
(fimax,
Y
lmtn
,
Л-
1т1п>
(fimm—ВерХНИе
и нижние пределы для Y, X и ср
Все величины, которые должны быть в допустимых пре-
делах, называют контролируемыми величинами
Контролируемые величины — это зависимые параметры ре-
жима X
и
Y,
а
также функции от них ф(Х, Y), например
токи и потоки мощности
Режим является допустимым, если для всех
/
/Jmm
^
I
j ^
Ijrnax<
(13.41)
где f, — /-я контролируемая величина;
f,
max
,
f
/m
«
n
— наи-
большее и наименьшее допустимые значения контролируе-
мой величины
Условия допустимости режима (13 41) эквивалентны ус-
ловиям (13
38) — (13
40) Неравенства (13 41) часто запи-
сывают отдельно для наибольших
f
lmax
и наименьших
f
imm
допустимых предельных значений
в
следующем виде:
/,-/,тат<0;
I
пз42)
Расчет допустимого режима состоит в определении зави-
симых X
и
независимых Y переменных, удовлетворяющих
уравнениям установившегося режима (13 36) и техническим
ограничениям на контролируемые величины (13 42).
Учет ограничений-неравенств очень усложняет оптими-
зацию
в
сравнении
с
учетом только ограничений-равенств.
Последние легко учесть по методу Лагранжа,
а
учет огра-
ничений-неравенств требует применения методов нелиней-
ного программирования
Метод штрафных функций нашел широкое применение
в отечественной и зарубежной практике для расчета допус-
тимого режима [23] При этом функция (13 37) дополня-
ется штрафной функцией
m =
2KAfj-U)
2
(13
43)
и расчет допустимого режима соответствует определению
минимума функции
Т
1
= Т + Д/ = Т + 2^(/у-Ы» (13.44)
'§
13 4 Расчет допустимых
и
оптимальных режимов
557
при условии существования хотя бы одного допустимого
режима.
В (13.44) К] — весовой коэффициент; /
П
р/ — предельное
значение контролируемой величины, равное наибольшему
или наименьшему допустимому значению и (13.42).
В штрафную функцию (13 43) и функцию (13 44) вхо-
дят только те контролируемые величины, для которых не
выполняются ограничения (13 42) Это значит, что К,Ф0,
если /-е ограничение нарушено, и К/ = 0, если // находится
в допустимой области
Если
Ч
/
1
=
0,
то все И>Й(Х, Y)—0 и
f,—/up/
=
0,
i e удо-
влетворяются уравнения установившегося режима и все
ограничения на контролируемые величины Задача расчета
допустимого режима (или ввода режима в допустимую об-
ласть) состоит в определении такого режима, для которого
имеет место «наименьшее» нарушение технических ограни-
чений на контролируемые параметры, т е в определении
режима, для которого функция Ш в (13 43) принимает наи-
меньшее значение.
При учете ограничений по методу штрафных функций
предполагается возможность лео1раниченного изменения
всех контролируемых величин /, Однако при выходе какой-
либо переменной за допустимые пределы к целевой функ-
ции прибавляется большая величина — штраф, делающий
работу за пределами допустимой области невыгодной При
выходе за пределы независимой переменной последняя
фиксируется на пределе и соответствующее ограничение не
учитывается в выражении (13 43) или (13 44) Таким обра-
зом, выполнить ограничения (13 38) достаточно просто, по-
скольку при расчете установившеюся режима Y задается,
и на каждом шаге итерационного расчета допустимою ре-
жима можно зафиксировать все компоненты Y, вышедшие
за пределы Компоненты вектора зависимых параметров ре-
жима X и функции ф(Х, Y) заранее неизвестны и опреде-
ляются только после расчета установившегося режима,
следовательно, нет гарантии, что X и tp(X, Y) будут нахо-
диться в заданных пределах, т е будут выполняться
(13 39), (13 40) Именно для выполнения этих условий надо
найти min^F].
Основное достоинство метода штрафных функций — про-
стота алгоритма, недостаток — замедление сходимости при
приближении к границе допустимой области, поэтому зна-
558 Оптимизация режимов электроэнергетических систем Гл. 13
чительное внимание уделяется ускорению сходимости.
Итак, задачу ввода режима в допустимую область
'(13.42) можно сформулировать как следующую задачу не-
линейного программирования: определить ми-
нимум штрафной функции (13.43) при выполнении (13.36).
Для ее решения можно применять не только метод штраф-
ных функций, но и другие методы нелинейного программи-
рования.
Расчет оптимального режима состоит в определении та-
кого допустимого режима, при котором целевая функция
оптимизации #(Х, Y) равна минимальному значению.
Оптимальный режим получается при совместной мини-
мизации Wt и целевой функции оптимизации #(Х, Y), т. е.
W
2
= Ч'
х
+ И (X, Y). (13.45)
В качестве функции Я(Х, Y) при оптимизации режимов
электроэнергетических систем обычно принимаются пере-
менные составляющие затрат на производство электроэнер-
гии, зависящие от режима сети, т. е. расход условного топ-
лива (или затраты на топливо) на тепловых станциях. При
решении более частной задачи оптимизации режима сети по
напряжениям U, реактивной мощности Q и коэффициентам
трансформации п такой функцией могут являться суммар-
ные потери активной мощности в сети.
Расчет оптимального режима состоит в определении зна-
чений зависимых и независимых параметров режима X и Y,
при которых удовлетворяются уравнения установившегося
режима (13.36), технические ограничения на контролируе-
мые величины (13.42) и целевая функция оптимизации
равна наименьшему значению. Задача определения допусти-
мого или оптимального режима начинается с расчета ис-
ходного установившегося режима. Если на первом шаге или
в ходе итерационного процесса определения допустимого,
а также оптимального режима решение уравнений исходно-
го установившегося режима не существует, то необходимо
так изменить независимые параметры режима Y, чтобы
обеспечить существование решения.
Для расчета оптимальных и допустимых режимов широ-
кое применение нашел метод приведенного градиента [19,
25].
При использовании этого метода на каждом шаге оп-
тимизации по мере убывания приведенного градиента изме-
няется вектор Y, а X определяется в результате расчета
§ 13.5
Оптимизация режима питающей сети по
U, Q и п 559
установившегося режима по методу Ньютона. Приведенный
градиент определяется как градиент неявной функции (см.
§13.5).
Для расчетов оптимальных режимов электроэнергети-
ческих систем и электрических сетей можно использовать
методы второго порядка. В этом случае оптимизация ведет-
ся по вектору Z, компонентами которою могут бы
гь
как за-
висимые X, так и независимые Y параметры режима, кото-
рые меняются на каждом шаге оптимизации. Методы вто-
рого порядка представляют собой итерационную процедуру
метода Ньютона, примененную к градиенту функции \Р
2
в (13.45), т. е. методом Ньютона решается система уравне-
ний
-^-=0.
(13.46)
Решение системы (13.46) определяет оптимальный ре-
|ким, т. е. параметры Z, определенные в результате решения
113.46), соответствуют минимуму И и удовлетворяют огра-
ничениям (13.42) и уравнениям установившегося режима
(13.36).
13.5.
ОПТИМИЗАЦИЯ РЕЖИМА ПИТАЮЩЕЙ СЕТИ
ПО НАПРЯЖЕНИЮ, РЕАКТИВНОЙ МОЩНОСТИ
И КОЭФФИЦИЕНТАМ ТРАНСФОРМАЦИИ
Задача оптимизации режима электрической сети по на-
пряжению U, реактивной мощности Q и коэффициентам
трансформации п регулируемых трансформаторов и авто-
трансформаторов состоит в определении установившегося
режима электрической сети, при котором были бы выдер-
жаны технические ограничения и были бы минимальными
потери активной мощности в сети. В этой задаче заданы ак-
тивные мощности электрических станций Р
т
, (за исключе-
нием станций в узле баланса), а также активные и реактив-
ные мощности узлов нагрузки P
m
, Q
m
. Учитываются ограни-
чения-равенства в виде уравнений установившегося режима
(13.36) и ограничения-неравенства на контролируемые ве-
личины (13.42).
Оптимизация режима питающей сети по U, Q и п — это
либо самостоятельная задача минимизации потерь в тех