I. Ramos Arreguin (ed.) Automation and Robotics
Подождите немного. Документ загружается.

Automation and Robotics
Automation and Robotics
Edited by
Juan Manuel Ramos Arreguin
I-Tech
Published by I-Tech Education and Publishing
I-Tech Education and Publishing
Vienna
Austria
Abstracting and non-profit use of the material is permitted with credit to the source. Statements and
opinions expressed in the chapters are these of the individual contributors and not necessarily those of
the editors or publisher. No responsibility is accepted for the accuracy of information contained in the
published articles. Publisher assumes no responsibility liability for any damage or injury to persons or
property arising out of the use of any materials, instructions, methods or ideas contained inside. After
this work has been published by the I-Tech Education and Publishing, authors have the right to repub-
lish it, in whole or part, in any publication of which they are an author or editor, and the make other
personal use of the work.
© 2008 I-Tech Education and Publishing
www.i-techonline.com
Additional copies can be obtained from:
publication@ars-journal.com
First published May 2008
Printed in Croatia
A catalogue record for this book is available from the Austrian Library.
Automation and Robotics, Edited by Juan Manuel Ramos Arreguin
p. cm.
ISBN 978-3-902613-41-7
1. Automation. 2. Robotics. I. Ramos Arreguin

V
Preface
In this book, a set of relevant, updated and selected papers in the field of automation and
robotics are presented. These papers describe projects where topics of artificial intelligence,
modeling and simulation process, target tracking algorithms, kinematic constraints of the
closed loops, non-linear control, are used in advanced and recent research.
Also, the lecturer can find some of the new methodologies applied to solve complex
problems in the field of control and robotic research fields. Moreover, this book can serve as
a good information source for scientific scholars, engineers and beginners who would like to
start working with both automation and robotic areas. Combining the ideas of the diverse
disciplines involved in such areas, this book give hints and help about how to implement
them on products for industrial automation and robotics applications.
I would like to thank all the researchers who send their works to share with the scientific
community. The editors are extremely grateful to all of them for their support to complete
this book.
Editor
Juan Manuel Ramos Arreguin
Electronica y Automatizacion
Universidad Tecnologica de San Juan del Rio
jramos@mecamex.net

VII
Contents
Preface V
1. Tracking Control for Multiple Trailer Systems by Adaptive Algorithmic
Control
001
Tomoaki Kobayashi, Toru Yoshida, Junichi Maenishi, Joe Imae and Guisheng Zhai
2. Enhanced Motion Control Concepts on Parallel Robots 017
Frank Wobbe, Michael Kolbus and Walter Schumacher
3. Vision Guided Robot Gripping Systems 041
Zdzislaw Kowalczuk and Daniel Wesierski
4. Closed-Loop Feedback Systems in Automation and Robotics,
Adaptive and Partial Stabilization
073
G. R. Rokni Lamooki
5. Nonlinear Control Law for Nonholonomic Balancing Robot 087
Alicja Mazur and Jan Kdzierski
6. Deghosting Methods for Track-Before-Detect Multitarget
Multisensor Algorithms
097
Przemyslaw Mazurek
7. Identification of Dynamic Systems & Selection of Suitable Model 121
Mohsin Jamil, Dr. Suleiman M Sharkh and Babar Hussain
8. Towards an Automated and Optimal Design of Parallel Manipulators 143
Marwene Nefzi, Martin Riedel and Burkhard Corves
9. Identification of Continuous-Time Systems with Time Delays by
Global Optimization Algorithms and Ant Colony Optimization
157
Janusz P. Paplinski
10. Linear Lyapunov Cone-Systems 169
Przemysaw Przyborowski and Tadeusz Kaczorek
11. Pneumatic Fuzzy Controller Simulation vs Practical Results for
Flexible Manipulator
191
Juan Manuel Ramos-Arreguin, Jesus Carlos Pedraza-Ortega,
Efren Gorrostieta-Hurtado, Rene de Jesus Romero-Troncoso,
Jose Emilio Vargas-Soto and Francisco Hernandez-Hernandez1

VIII
12. Nonlinear Control Strategies for Bioprocesses: Sliding Mode
Control versus Vibrational Control
201
Dan Seliteanu, Emil Petre, Dorin Popescu and Eugen Bobau
13. Sliding Mode Observers for Rotational Robotics Structures 223
Dorin Sendrescu, Dan Seliteanu, Emil Petre and Cosmin Ionete
14. A Declarative Framework for Constrained Search Problems in
Manufacturing
243
Sitek Pawek and Wikarek Jaroslaw
15. Derivation and Calculation of the Dynamics of Elastic Parallel Manipulators 261
Krzysztof Stachera and Walter Schumacher
16. Orthonormal Basis and Radial Basis Functions in Modeling and
Identification of Nonlinear Block-Oriented Systems
277
Rafa Stanisawski and Krzysztof J. Latawiec
17. Control System of Underwater Vehicle Based on Artificial
Intelligence Methods
285
Piotr Szymak and Józef Maecki
18. Automatization of Decision Processes in Conflict Situations:
Modelling, Simulation and Optimization
297
Zbigniew Tarapata
19. Fuzzy Knowledge Representation Using Probability Measures of
Fuzzy Events
329
Anna Walaszek-Babiszewska
20. Multiple Multi-Objective Servo Design - Evolutionary Approach 343
Piotr Wozniak
21. Model-Based Control of a Nonlinear One Dimensional Magnetic
Levitation with a Permanent-Magnet Object
359
Zhenyu Yang, Gerulf K.M. Pedersen and Jørgen H. Pedersen
22. Nonlinear Adaptive Tracking-Control Synthesis for General Linearly
Parametrized Systems
375
Zenon Zwierzewicz
1
Tracking Control for Multiple Trailer Systems
by Adaptive Algorithmic Control
Tomoaki Kobayashi, Toru Yoshida, Junichi Maenishi,
Joe Imae and Guisheng Zhai
Osaka Prefecture University
Japan
1. Introduction
In recent years, a truck-trailer system is the most useful physical distribution system. The
truck-trailer systems have more convenience than coastal services or freight trains.
Meanwhile, problems of the traffic jam and the air pollution in an urban area have become
serious, year after year. Therefore improvement and rationalization of the transport
efficiency are social needs. There are many papers suggesting a platoon system of several
trucks as a part of development of ITS (Intelligent Transport System). These platoon systems
consist of several unmanned trucks automatically following a truck driven by a conductor,
and it is commonly believed that it brings improvements of energy efficiency along with
alleviation of the traffic jam. Moreover, there is a purpose of covering insufficient workforce
of truck drivers who have to do severe labors, too. In the platoon, trucks are not physically
connected to each other, and thus there is much flexibility. On the other hand, even if each
vehicle is physically connected by mechanical linkage, this is not important restrictions, for
transport robots which are operated in the factory, because moving range and action plan
are limited. Moreover, the multiple trailer system is safer than platoon system, because if
each vehicle is physically connected, there is no danger of collision among trailers. In this
paper, we deal with a control method for a physically connected multiple trailer robot,
which is a transport system in factories.
The control method of connected vehicle has been studied for a long time (Laumond, 1986).
In particular, there are many papers which studied controlling its backward motion with
guaranteed stability (Sampei & Kobayashi, 1994). Moreover, kinematical model of a multiple
trailer system is described by a nonholonomic system, and it is a controllable nonlinear
system (Hermann & Krener, 1977). In theoretical field, it has been a hot subject of research,
because asymptotic stabilization is impossible using one continuous time-invariant since the
nonholonomic system does not satisfy the Brockett's necessary condition for stabilizability
(Brockett, 1983). Therefore, the control problem of nonholonomic system is a theoretically
difficult problem, thereupon various researches such as time-variant controller (M'Closkey
& Murray, 1993) or hybrid control techniques (Matsune et al., 2005) are performed. We look
at this issue from more practical point of view, then investigate a real-time control
algorithm, which is based on the so called algorithmic control (Kobayashi et al., 2005a),
(Imae et al., 2005) with a similar formulation of the model predictive control (MPC)
Automation and Robotics
2
technique for nonlinear continuous time system. Our algorithmic design approach is a
technique for ensuring robustness by adopting a numeric solution called Riccati Equation
Based (REB) algorithm using quasi linearization that includes feedback solution. Moreover,
though details are described later, the control technique by algorithmic design which we
proposed is an effective method for nonholonomic systems because our method is switching
and applying the control strategy on a short control interval and thus the controller is
discontinuous time variant, which does not violate Brockett's theorem. We showed the
effectiveness of proposed method applicable to nonholonomic systems through some
simulations and an experiment with a differential-driven unicycle vehicle model (Kobayashi
et al., 2005b). Then, we extend our design method by incorporating numerical robustness for
disturbances and parameter uncertainties and, by focusing on the switching interval of
control strategy on iterative process of algorithmic design (Kobayashi et al., 2006). We
discussed about effectiveness of our approach for an unstable motion control of high order
nonlinear system, in this paper. In the most of conventional research, the direct-hooked type
model (Lee et al., 2001) is treated. The direct-hooked model can be transformed to a
canonical form called chained form (Murray & Sastry, 1993). Then, control problem for the
direct-hooked model can be reduced to a canonical problem. However, the direct-hooked
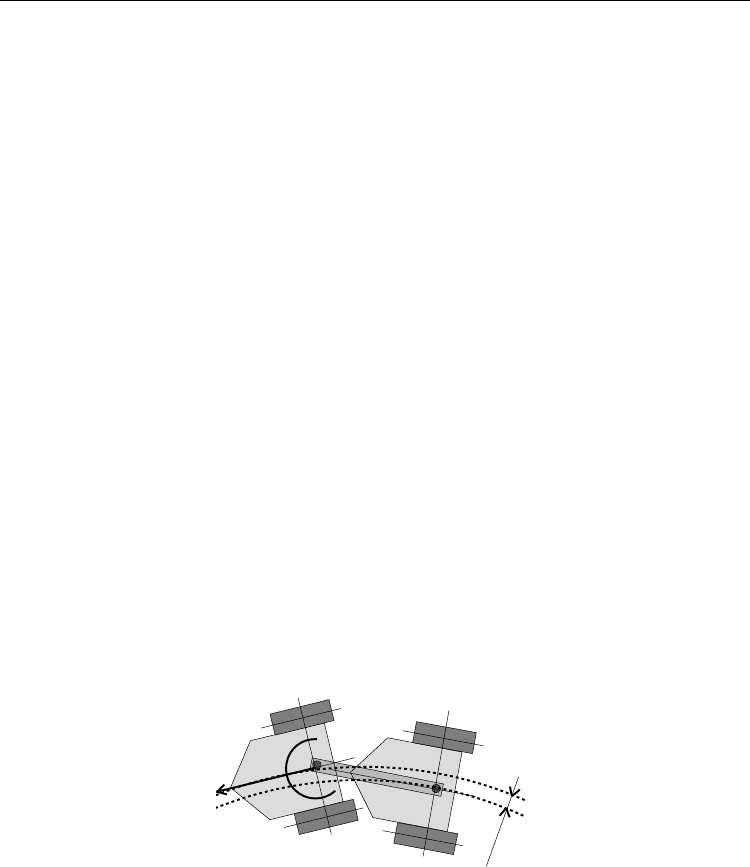
model has a tracking error of follow-on trailers (Fig.1). Therefore, there are many
suggestions for eliminating the tracking error by model constructions or mechanical linkage
design. We pick up a off-hooked model (Lee et al., 2004) which has a most simple structure
and cannot be converted to canonical form (Ishikawa, 1993). Therefore, proposed
algorithmic design is considered as an effective strategy for the off-hooked trailer system,
because our approach can treat the general nonlinear systems. The effectiveness is discussed
through a numerical simulation result.
The outline of this paper is as follows. In section 2, we describe the nonlinear optimal
control problems and the Riccati Equation Based algorithm. In section 3, the algorithmic
design method is described in detail. Also, we make an extension of our design method for
robustness. The backward motion control problem of multiple trailer systems is formulated
in section 4. In section 5, we show some simulation results in order to demonstrate the
effectiveness of adaptive algorithmic design. Section 6 concludes the paper.
v
v
ω
Tracking Error
Fig. 1 Tracking error of the direct-hooked trailer system
2. Optimal control problem
2.1 Formulation
We deal with the following general nonlinear system
() (, (), ())
x
tftxtut
=
(1)