Hager G., Wellein G. Introduction to High Performance Computing for Scientists and Engineers
Подождите немного. Документ загружается.

Solutions to the problems 295
1 double precision, dimension(0:255), save :: vtab
2 double precision, dimension(N) :: ftab
3 logical, save :: flag = .TRUE.
4 if(flag) then ! do this only once
5 flag = .FALSE.
6 do i=0,255
7 vtab(i) = -0.5d0
*
COS(2.d0
*
DBLE(i))
8 enddo
9 endif
10 do i=1,N ! do this on every call
11 ftab(i) = vtab(IAND(v(i),255))
12 enddo
13 do j=1,N
14 do i=1,N
15 mat(i,j) = s(i,j)
*
ftab(i)
16 enddo
17 enddo
Since v() may change between calls of the function, ftab() must be recomputed
every time, but the inner loop is now trivially SIMD-vectorizable.
Solution 3.8 (page 93): TLB impact.
TLB “cache lines” are memory pages, so the penalty for a miss must be compared
to the time it takes to stream one page into cache. At present, memory bandwidth
is a few GBytes/sec per core, leading to a transfer time of around 1
µ
s for a 4kB
page. The penalty for a TLB miss varies widely across architectures, but it is usually
far smaller than 100 CPU cycles. At clock frequencies of around 2 GHz, one TLB
miss per page on a pure streaming code has no noticeable impact on performance. If
significantly less than a page is transferred before going to the next, this will change,
of course.
Some systems have larger memory pages, or can be configured to use them. At
best, the complete working set of an application can be mapped by the TLB, so that
the number of misses is zero. Even if this is not the case, large pages can enhance the
probability of TLB hits, because it becomes less likely that a new page is hit at any
given moment. However, switching to large pages also usually reduces the number
of available TLB entries.
Solution 4.1 (page 114): Building fat-tree network hierarchies.
Static routing assigns a fixed network route to each pair of communication part-
ners. With a 2:3 oversubscription, some connections will get less bandwidth into the
spine because it is not possible to distribute the leaves evenly among the spine con-
nections (the number of leaves on a leaf switch is not a multiple of the number of its
connections into the spine). Hence, the network gets even more unbalanced, beyond
the contention effects incurred by static routing and oversubscription alone.

296 Introduction to High Performance Computing for Scientists and Engineers
Solution 5.1 (page 140): Overlapping communication and computation.
Hiding communication behind computation is something that sounds straightfor-
ward but is usually not easy to achieve in practice; see Sections 10.4.3 and 11.1.3 for
details. Anyway, assuming that it is possible, the time for parallel execution in the
denominator of the strong scaling speedup function (5.30) becomes
max
h
(1−s)/N,
κ
N
−
β
+
λ
µ
−1
i
. (B.1)
This describes a crossover from perfectly to partially hidden communication when
µ
(1−s) =
κ
N
1−
β
c
+
λ
N
c
. (B.2)
As the right-hand side of this equation is strictly monotonous in N
c
if 0 ≤
β
≤ 1,
the crossover will always be shifted to larger N on the slow computer (
µ
> 1). By
how much exactly (a factor of at least
µ
is certainly desirable) is given by the ratio
N
c
(
µ
)/N
c
(
µ
= 1), but solving for N
c
is not easily possible. Fortunately, it is sufficient
to investigate the important limits
λ
= 0 and
κ
= 0. For vanishing latency,
N
c
(
λ
= 0) =
µ
(1−s)
κ
1/(1−
β
)
, (B.3)
and
N
c
(
µ
> 1)
N
c
(
µ
= 1)
λ
=0
=
µ
1/(1−
β
)
>
µ
. (B.4)
In the latency-dominated limit
κ
= 0 we immediately get
N
c
(
µ
> 1)
N
c
(
µ
= 1)
κ
=0
=
µ
. (B.5)
We have derived an additional benefit of slow computers: If communication can be
hidden behind computation, it becomes noticeable at a certain N, which is at least
µ
times larger than on the standard computer.
Can you do the same analysis for weak scaling?
Solution 5.2 (page 141): Choosing an optimal number of workers.
For strong scaling and latency-dominated communication, the walltime for exe-
cution (“time to solution”) is
T
w
= s+
1−s
N
+
λ
(B.6)
if s is the nonparallelizable fraction and
λ
is the latency. The cost for using N pro-
cessors for a time T
w
is NT
w
, yielding a cost-walltime product of
V = NT
2
w
= N
s+
1−s
N
+
λ
2
, (B.7)
Solutions to the problems 297
which is extremal if
∂
V
∂
N
=
1
N
2
[(1+
λ
N + (N −1)s)(s−1+ N(
λ
+ s))] = 0 . (B.8)
The only positive solution of this equation in N is
N
opt
=
1−s
λ
+ s
. (B.9)
Interestingly, if we assume two-dimensional domain decomposition with halo ex-
change so that
T
w
= s+
1−s
N
+
λ
+
κ
N
−1/2
, (B.10)
the result is the same as in (B.9), i.e., independent of
κ
. This is a special case, how-
ever; any other power of N in the communication overhead leads to substantially
different results (and a much more complex derivation).
Finally, the speedup obtained at N = N
opt
is
S
opt
=
2(s+
λ
) +
κ
r
λ
+ s
1−s
!
−1
. (B.11)
A comparison with the maximum speedup S
max
= 1/(
λ
+ s) yields
S
max
S
opt
= 2+
κ
p
(1−s)(
λ
+ s)
, (B.12)
so for
κ
= 0 the “sweet spot” lies at half the maximum speedup, and even lower for
finite
κ
.
Of course, no matter what the parallel application’s communication requirements
are, if the workload is such that the time for a single serial application run is “toler-
able,” and many such runs must be conducted, the most efficient way to use a par-
allel computer is throughput mode. In throughput mode, many instances of a serial
code are run concurrently under control of a resource management system (which
is present on all production machines). This provides the best utilization of all re-
sources. For obvious reasons, such a workload is not suitable for massively parallel
machines with expensive interconnect networks.
Solution 5.3 (page 141): The impact of synchronization.
Synchronization appears at the same place as communication overhead, leading
to eventual slowdown with strong scaling. For weak scaling, linear scalability is de-
stroyed; linear sync overhead even leads to saturation.
Solution 5.4 (page 141): Accelerator devices.
Ignoring communication aspects (e.g., overhead for moving data into and out of
the accelerator), we can model the situation by assuming that the accelerated parts

298 Introduction to High Performance Computing for Scientists and Engineers
of the application execute
α
times faster than on the host, whereas the rest stays
unchanged. Using Amdahl’s Law, s is the host part and p = 1−s is the accelerated
part. Therefore, the asymptotic performance is governed by thehost part; if, e.g.,
α
=
100 and s = 10
−2
, the speedup is only 50, and we are wasting half of the accelerator’s
capability. To get a speedup of r
α
with 0 < r < 1, we need to solve
1
s+
1−s
α
= r
α
(B.13)
for s, leading to
s =
r
−1
−1
α
−1
, (B.14)
which yields s ≈ 1.1 ×10
−3
at r = 0.9 and
α
= 100. The lesson is that efficient
use of accelerators requires a major part of original execution time (much more than
just 1 −1/
α
) to be moved to special hardware. Incidentally, Amdahl had formu-
lated his famous law in his original paper along the lines of “accelerated execu-
tion” versus “housekeeping and data management” effort on the ILLIAC IV super-
computer [R40], which implemented a massively data-parallel SIMD programming
model:
A fairly obvious conclusion which can be drawn at this point is that the effort
expended on achieving high parallel processing rates is wasted unless it is ac-
companied by achievements in sequential processing rates of very nearly the
same magnitude. [M45]
This statement fits perfectly to the situation described above. In essence, it was al-
ready derived mathematically in Section 5.3.5, albeit in a slightly different context.
One may argue that enlarging the (accelerated) problem size would mitigate the
problem, but this is debatable because of the memory size restrictions on accelerator
hardware. The larger the performance of a computational unit (core, socket, node,
accelerator), the larger its memory must be to keep the serial (or unaccelerated) part
and communication overhead under control.
Solution 6.1 (page 162): OpenMP correctness.
The variable noise in subroutine f() carries an implicit SAVE attribute, be-
cause it is initialized on declaration. Its initial value will thus only be set on the first
call, which is exactly what would be intended if the code were serial. However, call-
ing f() from a parallel region makes noise a shared variable, and there will be
a race condition. To correct this problem, either noise should be provided as an
argument to f() (similar to the seed in thread safe random number generators), or
its update should be protected via a synchronization construct.
Solution 6.2 (page 162):
π
by Monte Carlo.
The key ingredient is a thread safe random number generator. According to the
OpenMP standard [P11], the RANDOM_NUMBER() intrinsic subroutine in Fortran 90
Solutions to the problems 299
is supposed to be thread safe, so it could be used here. However, there are perfor-
mance implications (why?), and it is usually better to avoid built-in generators any-
way (see, e.g., [N51] for a thorough discussion), so we just assume that there is a
function ran_gen(), which essentially behaves like the rand_r() function from
POSIX: It takes a reference to an integer random seed, which is updated on each call
and stored in the calling function, separately for each thread. The function returns an
integer between 0 and 2
31
, which is easily converted to a floating-point number in
the required range:
1 integer(kind=8) :: sum
2 integer, parameter :: ITER = 1000000000
3 integer :: seed, i
4 double precision, parameter :: rcp = 1.d0/2
**
31
5 double precision :: x,y,pi
6 !$OMP PARALLEL PRIVATE(x,y,seed) REDUCTION(+:sum)
7 seed = omp_get_thread_num() ! everyone gets their own seed
8 !$OMP DO
9 do i=1,ITER
10 x = ran_gen(seed)
*
rcp
11 y = ran_gen(seed)
*
rcp
12 if (x
*
x + y
*
y .le. 1.d0) sum=sum+1
13 enddo
14 !$OMP END DO
15 !$OMP END PARALLEL
16 pi = (4.d0
*
sum) / ITER
In line 7, the threads’ private seeds are set to distinct values. The “hit count” for the
quarter circle in the first quadrant is obtained from a reduction operation (summation
across all threads) in sum, and used in line 16 to compute the final result for
π
.
Using different seeds for all threads is vital because if each thread produces the
same sequence of pseudorandom numbers, the statistical error would be the same as
if only a single thread were running.
Solution 6.3 (page 163): Disentangling critical regions.
Evaluation of func() does not have to be protected by a critical region at all (as
opposed to the update of sum). It can be done outside, and the two critical regions
will not interfere any more:
1 !$OMP PARALLEL DO PRIVATE(x)
2 do i=1,N
3 x = SIN(2
*
PI
*
DBLE(i)/N)
4 x = func(x)
5 !$OMP CRITICAL
6 sum = sum + x
7 !$OMP END CRITICAL
8 enddo
9 !$OMP END PARALLEL DO
10 ...
11 double precision FUNCTION func(v)
12 double precision :: v
13 !$OMP CRITICAL
300 Introduction to High Performance Computing for Scientists and Engineers
14 func = v + random_func()
15 !$OMP END CRITICAL
16 END SUBROUTINE func
Solution 6.4 (page 163): Synchronization perils.
A barrier must always be encountered by all threads in the team. This is not
guaranteed in a workshared loop.
Solution 6.5 (page 163): Unparallelizable?
Thanks to Jakub Jelinek from Red Hat for providing this solution. Clearly, the
loop can be parallelized right away if we realize that opt(n)=up
**
n, but expo-
nentiation is so expensive that we’d rather not take this route (although scalability
will be great if we take the single-thread performance of the parallel code as a base-
line [S7]). Instead we revert to the original (fast) version for calculating opt(n) if
we are sure that the previous iteration handled by this thread was at n-1 (line 12).
On the other hand, if we are at the start of a new chunk, indices were skipped and
opt(n) must be calculated by exponentiation (line 14):
1 double precision, parameter :: up = 1.00001d0
2 double precision :: Sn, origSn
3 double precision, dimension(0:len) :: opt
4 integer :: n, lastn
5
6 origSn = 1.d0
7 lastn = -2
8
9 !$OMP PARALLEL DO FIRSTPRIVATE(lastn) LASTPRIVATE(Sn)
10 do n = 0,len
11 if(lastn .eq. n-1) then ! still in same chunk?
12 Sn = Sn
*
up ! yes: fast version
13 else
14 Sn = origSn
*
up
**
n ! no: slow version
15 endif
16 opt(n) = Sn
17 lastn = n ! storing index
18 enddo
19 !$OMP END PARALLEL DO
20 Sn = Sn
*
up
The LASTPRIVATE(Sn) clause ensures that Sn has the same value as in the serial
case after the loop is finished. FIRSTPRIVATE(lastn) assigns the initial value of
lastn to its private copies when the parallel region starts. This is purely for conve-
nience, because we could have done the copying manually by splitting the combined
PARALLEL DO directive.
While the solution works for all OpenMP loop scheduling options, it will be
especially slow for static or dynamic scheduling with small chunksizes. In the special
case of “STATIC,1” it will be just as slow as using exponentiation from the start.
Solutions to the problems 301
Solution 6.6 (page 163): Gauss–Seidel pipelined.
This optimization is also called loop skewing. Starting with a particular site, all
sites that can be updated at the same time are part of a so-calledhyperplane and fulfill
the condition i+ j+k = const. = 3n, with n ≥1. Pipelined execution is now possible
as all inner loop iterations are independent, enabling efficient use of vector pipes
(see Section 1.6). Cache-based processors, however, suffer from the erratic access
patterns generated by the hyperplane method. Cache lines once fetched for a certain
stencil update do not stay in cache long enough to exploit spatial locality. Bandwidth
utilization (as seen from the application) is thus very poor. This is why the standard
formulation of the Gauss–Seidel loop nest together with wavefront parallelization
is preferable for cache-based microprocessors, despite the performance loss from
insufficient pipelining.
Solution 7.1 (page 184): Privatization gymnastics.
In C/C++, reduction clauses cannot be applied to arrays. The reduction must
thus be done manually. A firstprivate clause helps with initializing the private
copies of s[]; in a “true” OpenMP reduction, this would be automatic as well:
1 int s[8] = {0};
2 int
*
ps = s;
3
4 #pragma omp parallel firstprivate(s)
5 {
6 #pragma omp for
7 for(int i=0; i<N; ++i)
8 s[a[i]]++;
9 #ifdef _OPENMP
10 #pragma omp critical
11 {
12 for(int i=0; i<8; ++i) { // reduction loop
13 ps[i] += s[i];
14 }
15 } // end critical
16 #endif
17 } // end parallel
Using conditional compilation, we skip the explicit reduction if the code is compiled
without OpenMP.
Similar measures must be taken even in Fortran if the reduction operator to be
used is not supported directly by OpenMP. Likewise, overloaded C++ operators are
not allowed in reduction clauses even on scalar types.
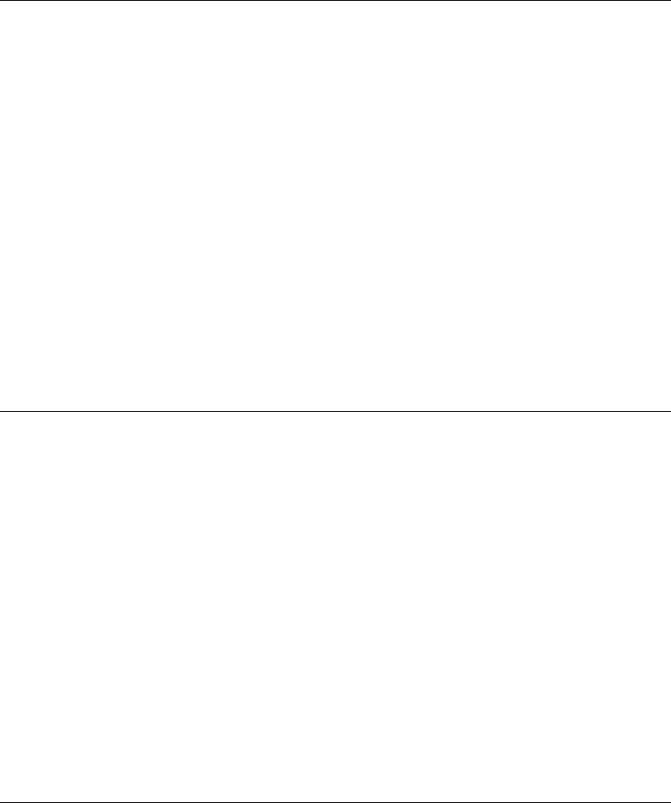
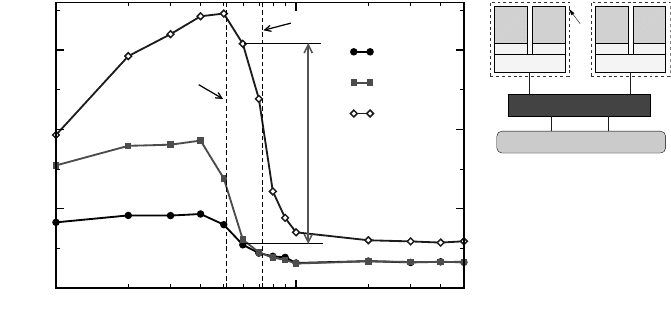
Solution 7.2 (page 184): Superlinear speedup.
Figure B.2 shows that the described situation occurs at a problem size around
600
2
: A single 4MB L2 cache is too small to accommodate the working set, but
8MB is sufficient. The speedup when going from one (or two) threads to four is 5.4.
When the working set fits into cache, the grid updates are so fast that typical
302 Introduction to High Performance Computing for Scientists and Engineers
100 1000
N
0
500
1000
1500
Performance [MLUPs/sec]
1 thread
2 threads
1 socket
4 threads
8 MB L2
4 MB L2
5.4x speedup
socket
32k L1D 32k L1D 32k L1D 32k L1D
Chipset
Memory
P P P P
4MB L2 4MB L2
Figure B.2: Superlinear speedup with the 2D Jacobi solver (same data as in Figure 6.3). At
a problem size of 600
2
, the working set is too large to fit into one socket’s L2 cache, so
performance is close to memory-bound (filled symbols). Using two additional threads (open
diamonds), 8MB cache become available, which is large enough to accommodate all data.
Hence, the 5.4× speedup.
OpenMP overhead, especially implicit barriers (see Section 7.2.2), might dominate
runtime if the number of threads is large. To find a criterion for this we must com-
pare the time for one sweep with a typical synchronization overhead. Looking at
the maximum two-thread in-cache performance (filled squares), we estimate that a
single sweep takes about 170
µ
s. As a very rough guideline we may assume that syn-
chronizing all threads in a shared-memory machine requires about 1
µ
s per socket if
the barrier is implemented efficiently [M41]. Hence, on standard two- or four-socket
nodes one should be able to observe superlinear scaling for this kind of problem.
Solution 7.3 (page 184): Reductions and initial values.
If the code is compiled without OpenMP support, it should still produce correct
results, which it doesn’t if R is not initialized. If we could use C(j) as a reduction
variable, this detour would not be necessary, but only named variables are allowed in
reduction clauses.
Solution 7.4 (page 184): Optimal thread count.
Parallelism adds overhead, so one should use as few threads as possible. The
optimal number is given by the scalability of main memory bandwidth versus thread
count. If two out of six threads already saturate a socket’s memory bus, running more
than four threads does not make sense. All the details about cache groups and system
architecture are much less relevant.
Note that shared caches often do not provide perfect bandwidth scaling as well,
so this reasoning may apply to in-cache computations, too [M41].
Solutions to the problems 303
Solution 8.1 (page 201): Dynamic scheduling and ccNUMA.
As usual, performance (P) is work (W) divided by time (t). We choose W = 2,
meaning that two memory pages are to be assigned to the two running threads. Each
chunk takes a duration of t = 1 to execute locally, so that P = 2p if there is no
nonlocal access. In general, four cases must be distinguished:
1. Both threads access their page locally: t = 1.
2. Both threads have to access their page remotely: Since the inter-LD network is
assumed to be infinitely fast, and there is no contention on either memory bus,
we have t = 1.
3. Both threads access their page in LD0: Contention on this memory bus leads
to t = 2.
4. Both threads access their page in LD1: Contention on this memory bus leads
to t = 2.
These four cases occur with equal probability, so the average time to stream the two
pages is t
avg
= (1 + 1 + 2+ 2)/4 = 1.5. Hence, P = W/t
avg
= 4p/3, i.e., the code
runs 33% slower than with perfect access locality.
This derivation is so simple because we deal with only two locality domains, and
the elementary work package is two pages no matter where they are mapped. Can
you generalize the analysis to an arbitrary number of locality domains?
Solution 8.2 (page 202): Unfortunate chunksizes.
There are two possible reasons for bad performance at small chunksizes:
• This is a situation in which the hardware-based prefetching mechanisms of
x86-based processors are actually counterproductive. Once activated by a num-
ber of successive cache misses (two in this case), the prefetcher starts transfer-
ring data to cache until the end of the current page is reached (or until can-
celed). If the chunksize is smaller than a page, some of this data is not needed
and will only waste bandwidth and cache capacity. The closer the chunksize
gets to the page size, the smaller this effect.
• A small chunksize will also increase the number of TLB misses. The actual
performance impact of TLB misses is strongly processor-dependent. See also
Problem 3.8.
Solution 8.3 (page 202): Speeding up “small” jobs.
If multiple streams are required, round-robin placement may yield better single-
socket performance than first touch because part of the bandwidth can be satisfied
via remote accesses. The possible benefit of this strategy depends strongly on the
hardware, though.
304 Introduction to High Performance Computing for Scientists and Engineers
Solution 8.4 (page 202): Triangular matrix-vector multiplication.
Parallelizing the inner reduction loop would be fine, but will only work with very
large problems because of OpenMP overhead and NUMA placement problems. The
outer loop, however, has different workloads for different iterations, so there is a
severe load balancing problem:
1 !$OMP PARALLEL DO SCHEDULE(RUNTIME)
2 do r=1,N ! parallel initialization
3 y(r) = 0.d0
4 x(r) = 0.d0
5 do c=1,r
6 a(c,r) =0.d0
7 enddo
8 enddo
9 !$OMP END PARALLEL DO
10 ...
11 !$OMP PARALLEL DO SCHEDULE(RUNTIME)
12 do r=1,N ! actual triangular MVM loop
13 do c=1,r
14 y(r) = y(r) + a(c,r)
*
x(c)
15 enddo
16 enddo
17 !$OMP END PARALLEL DO
We have added the parallel initialization loop for good page placement in ccNUMA
systems.
Standard static scheduling is certainly not a good choice here.Guided or dynamic
scheduling with an appropriate chunksize could balance the load without too much
overhead, but leads to nonlocal accesses on ccNUMA because chunks are assigned
dynamically at runtime. Hence, the only reasonable alternative is static scheduling,
and a chunksize that enables proper NUMA placement at least for matrix rows that
are not too close to the “tip” of the triangle.
What about the placement issues for x()?
Solution 8.5 (page 202): NUMA placement by overloading.
The parallel loop schedule is the crucial point. The loop schedules of the ini-
tialization and worksharing loops should be identical. Had we used a single loop, a
possible chunksize would be interpreted as a multiple of one loop iteration, which
touches a single char. A chunksize on a worksharing loop handling objects of type
D would refer to units of sizeof(D), and NUMA placement would be wrong.
Solution 9.1 (page 233): Shifts and deadlocks.
Exchanging the order of sends and receives also works with an odd number of
processes. The “leftover” process will just have to wait until its direct neighbors have
finished communicating. See Section 10.3.1 for a discussion of the “open chain”
case.