Гусев Н.В., Ляпушкин С.В., Коваленко М.В. Автоматизация технологических комплексов и систем в промышленности
Подождите немного. Документ загружается.

1) максимальное время отклика на событие;
2) предсказуемость;
3) возможность безотказной работы в течение длительного времени;
4) наличие системы приоритетов;
5) возможность параллельного выполнения нескольких задач.
Из вышеперечисленных требований следует, что системы реально-
го времени должны предсказуемо, в пределах максимально допустимого
времени реагировать на различные типы внутренних и внешних собы-
тий. Исходные требования ко времени реакции сист
емы и другим вре-
менным параметрам формируются техническим заданием на систему
либо логикой ее функционирования.
Исследования различных операционных систем показывают сле-
дующее:
1) для достижения реакции системы в пределах 100 мкс использу-
ются вышеописанные операционные системы реального времени [6];
2) в интервале от 100 мкс до 1 мс могут быть использованы много-
задачные операционные системы с расшир
ениями реального времени
UNIX, Linux, Windows NT, CE.
3) в диапазоне до 1 мс могут быть использованы классические мно-
гозадачные операционные системы, такие как Windows NT/XP, Linux
без расширения реального времени.
Достижение максимальной производительности зависит от слож-
ности вычислений, производимых в функционирующем программном
обеспечении. Однако для операционных систем Windows NT, Linux по-
лучить гарантированное время реакции невозможно. Поэтому использо-
вание та
ких операционных систем без какой-либо дополнительной до-
работки ограничивается областями, где опоздание реакции системы не
приведет к тяжелым последствиям или эта система используется для
моделирования и отработки тех или иных алгоритмов управления тех-
нологическим оборудованием.
Опыт применения Windows NT в различных областях автоматиза-
ции показывает, что в большинстве случаев операционная система без
каких ли
бо изменений используется в системах «мягкого реального
времени» [7, 8]. В большинстве случаев это интеллектуальные термина-
лы, верхний уровень SCADA-систем. В общей массе производимых
устройств с числовым программным управлением операционные систе-
мы с интегрированным ядром реального времени (RTX, Falcon,
Hyperkernel, IA-SPOX и др.) на сегодняшний день используются редко.
Это обусловлено отсутствием аппаратной поддержки большинства со-
временных контроллеров, а также н
евозможностью построения ком-
пактной системы (требования к flash-памяти не менее 10 Мбайт). Под
41
функционированием в режиме мягкого реального времени понимает-
ся работа операционной системы, иногда допускающей получение дан-
ных с некоторым опозданием [9, 10].
Историческая справка:
Одним из первых примеров использования управляющей ЭВМ
является применение в 1959 г. лампового компьютера RW300 компании
Thomson Ramo Woolridge с целью автоматического слежения за давле-
нием, расходом и температурой.
Другим наиболее значимым применением управляющей ЭВМ
была реализация системы управления «Apollo-11» для первой лунной
экспедиции, 1969 г. Управляющая программа занимала 64 Кбайта ОЗУ.
Реализация программы потребовала разработки новой теории цифрово-
го управления.
2.3.2. Понятие системы и примеры типичных приложений
цифрового управления
Производственные процессы и управляющие ими системы состоят
из многочисленных и разнообразных элементов, сложным образом
взаимодействующих друг с другом. Эти элементы связаны между собой
так, чтобы обеспечить обмен материей, энергией и информацией для
получения определенного конечного результата.
С точки зрения автоматизации под термином «система» понимает-
ся любой объект, который рассматривается, с одной стороны, как еди-
ное целое, а с другой – как совокупность связанных между собой опре-
деленным образом состав
ляющих. Цель системы – получить результат,
качественно или количественно превосходящий сумму результатов ра-
боты отдельных ее компонентов. Знание динамики позволяет предска-
зать поведение системы и выбрать правильное управляющее воздейст-
вие в соответствии с поставленной целью. Рассчитать необходимый ре-
гулятор. В крупных технических задачах одной из важнейших проблем
является структури
рование системы. В процессе эксплуатации взаимо-
действуют множество людей, происходит постепенная замена оборудо-
вания и добавление новых функций. Сложную систему необходимо рас-
сматривать как с общих позиций, так и с позиций всех ее компонентов.
Понятие системы в данном ключе характеризуется следую
щим об-
разом:
42
1) при описании сложной системы ее можно разбить на более про-
стые составляющие. При этом необходимо выбрать правильный уро-
вень детализации;
2) нет необходимости знать внутренние механизмы элемента для
того, чтобы предвидеть его в целом. Для управления достаточно знать
соотношение вход/выход.
3) для описания систем и их элементов можно применять разнооб-
разные математические методы. Однако эти методы можно использо-
вать, только когда все элементы системы и окружающая ее среда опи-
сывают
ся количественными соотношениями;
В качестве примера цифрового управления процессом рассмотрим
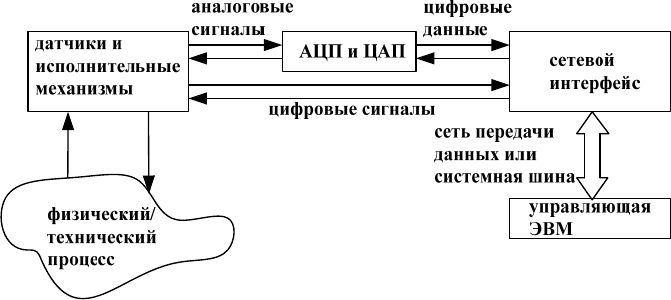
структуру, приведенную на рис. 2.6.
Показанная структура состоит из следующих частей:
1) управляющей ЭВМ;
2) каналов обмена информацией;
3) аналого-цифровых (АЦП) и цифро-аналоговых преобразователей
(ЦАП);
4) датчиков и исполнительных механизмов;
5) физического/технического процесса.
Рис. 2.6. Структура системы цифрового управления процессом
Физический процесс контролируется с помощью датчиков, т. е.
устройств, преобразующих физические параметры процесса (темпера-
туру, давление или координаты) в электрические величины, которые
можно непосредственно измерить (сопротивление, ток или разность по-
тенциалов). Непосредственное управление процессом осуществляется с
помощью исполнительных механизмов, которые преобразуют электри-
ческие сигналы в физические воздействия, главным образом движение –
перемещение и вращени
е, которые можно использовать для других це-
43
лей, например для открытия клапана. Примеры: сервомоторы, гидро-
клапаны, пневматически позиционирующие устройства.
Поскольку цифровые системы управления работают только с ин-
формацией, представленной в цифровой форме, то поэтому полученные
в результате измерений электрические аналоговые величины необходи-
мо обработать с помощью АЦП. Обратная операция – управление ис-
полнительными механизмами (электромоторами и клапанами) – проще,
поскольку компьютер мож
ет непосредственно вырабатывать электриче-
ские сигналы.
2.3.3. Программные средства систем управления
многокоординатными ЭП
Обзор архитектурных решений систем числового программного
управления показал, что в настоящее время наиболее актуальными ар-
хитектурными решениями являются варианты систем, в основе которых
лежит концепция PCNC. Тенденции последних лет [11, 12] отражают
тот факт, что в борьбе за рынок разработчики все больше отдают пред-
почтение однокомпьютерному варианту (PCNC-4). Это, прежде всего,
обусловлено следующими факторами: гибкостью в адапт
ации системы
управления к конкретному объекту, возможностью конечному пользо-
вателю программно реализовывать свои алгоритмы управления, отсут-
ствием значительных капиталовложений. Помимо этого, стоимость
оборудования, необходимого для реализации однокомпьютерного вари-
анта, значительно ниже стоимости архитектурных решений, реализо-
ванных на базе двух вычислительных устройств.
Отличительной особенностью данного архитектурного решения яв-
ляется программная реализация прил
ожений пользователя, ядра ЧПУ, ин-
терпретатора и интерполятора. Как правило, программно реализованные
алгоритмы управления многокоординатными электроприводами функ-
ционируют под управлением операционных систем реального времени.
Под операционной системой понимается комплекс программ, обес-
печивающих управление ресурсами программно-аппаратного комплекса
(вычислительной системы) и процессами, использующими эти ресурсы
при вычислениях.
Обзор операционных систем (ОС),
применяемых в системах с ар-
хитектурой типа PCNC, приведен в табл. 2.2.
44
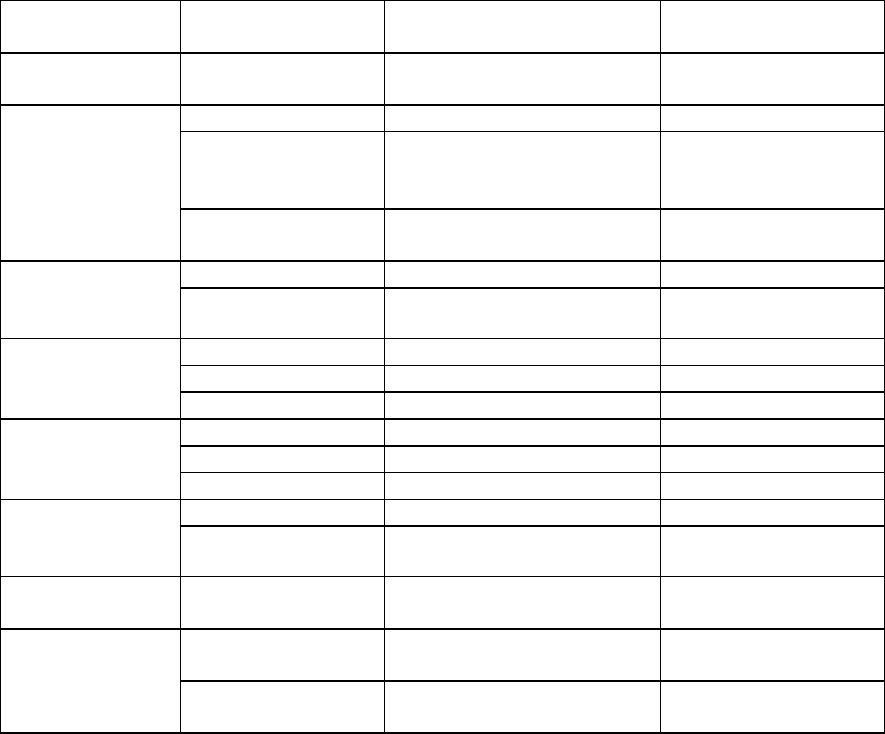
Таблица 2.2
Производитель Система PCNC Интерполяция
Операционная
система
СТАНКИН
(г. Москва)
WinPCNC Линейная, круговая Windows NT+RTX4.1
Siemens
(Германия)
802D Линейная, круговая RealTime DOS
840D
Линейная, круговая,
кубический сплайн,
B-сплайн
Windows NT+NCK /
RTUNIX
840Di
Линейная, круговая,
полиномиальная
Windows XP+NCK
НПП «Модель»
(г. Нижний
Новгород)
NC-2000 Линейная, круговая Windows NT
NC-3.5 Линейная, круговая RTOS
Балт-Систем
(г. Санкт-
Петербург)
NC 110 Линейная, круговая MS DOS
NC 200 Линейная, круговая MS DOS
NC 210 Линейная, круговая MS DOS
Fanuc
(Япония)
Series 300is Информация неизвестна Windows CE 4.2
Series 300i Информация неизвестна Windows XP
Series 160i Информация неизвестна Windows 2000
МОДМАШ
(г. Нижний
Новгород)
FMS-3000 Линейная, круговая MS DOS
FMS-3100 Линейная, круговая MS DOS
CandCNC
(США)
MP-1000-THC Линейная, круговая Windows 2000
МШАК
(Армения)
MSH-TURBO-M/U
Линейная, круговая,
сплайнами
Windows NT+RTX
MSH-PC104
Линейная, круговая,
сплайнами
Windows NT+RTX
Анализ систем с открытой архитектурой типа PCNC показал, что
наиболее часто в качестве операционной системы используется система
Microsoft Windows NT с интегрированным ядром реального времени
типа RTX (фирма VentureCom). Интегрированные ядра являются сто-
ронними разработками. Многие фирмы, разрабатывающие системы ти-
па PCNC, используют их без дополнительной доработки. Наряду с гото-
выми решениями также существуют и собственные разработки, напри-
мер ядро NCT (Numerical Control Kernel) фирмы Siemen
s. Помимо опе-
рационной системы Windows NT используются специализированные
системы, применяемые во встраиваемых системах – Windows CE,
RTDOS (Fanuc, Siemens). Их основными достоинствами являются малые
требования к памяти и дисковому пространству промышленных ПК,
меньшее время реакции системы на внешние события. В отечественных
разработках наибольшее применение находят системы PCNC на базе
ОС Windows с RTX, а также ставшей уже классической MS DOS.
45
С точки зрения использования алгоритмов интерполяции в отече-
ственных разработках наблюдается значительное отставание от зару-
бежных аналогов. Большинство отечественных разработок до сих пор
комплектуется только линейной и круговой интерполяцией, в то время
как разработки фирм Heidenhain, Siemens и др. опционально оснащены
многокоординатной кубической сплайн-интерполяцией и средствами
цифровой коррекции, позволяющими минимизировать динамическую
ошибку следя
щей системы. В тех случаях, когда отечественные разра-
ботчики применяют сплайн-интерполяцию, используются уже готовые
решения зарубежных производителей в виде модулей управления сер-
воприводами, устанавливаемых в PCI/ISA-слоты промышленного или
персонального компьютера.
С учетом описанных выше особенностей операционных систем,
а также архитектурных решений систем управления, построенных на
базе PCNC, можно сформировать основные требования к программному
обеспеч
ению:
–
надежность и предсказуемость (отсутствие нештатных ситуаций,
связанных с повисанием);
–
функционирование в режиме реального времени «Real Time»;
–
компактность;
–
возможность гибкого изменения алгоритмов функционирования
в соответствии с требованиями заказчика;
–
поддержка различных интерфейсов связи с технологическим
оборудованием.
Одним из наиболее существенных достоинств систем класса PCNC
на сегодняшний день является открытость не только архитектуры, но
и программного обеспечения. Практическое большинство программных
пакетов, поставляемых вместе с такими системами, обычно позволяют
производить перенастройку алгоритмов функционирования электроав-
томатики и интерфейса оператора. Однако программное обеспечение
и алгоритмы функционирования, отвечающие за управления движени-
ем, ка
к правило, не раскрываются. Такое обстоятельство в первую оче-
редь определено большой конкуренцией между разработчиками систем
с числовым программным управлением, следящими за электромехани-
ческими объектами.
46
Глава 3
АРХИТЕКТУРА СОВРЕМЕННЫХ СИСТЕМ С ЧПУ
Разработчики современных систем числового программного управ-
ления выделяют 5 основных архитектурных вариантов, которые пред-
ставлены на рынке. Первый вариант – это классические системы CNC
(Computer Numerical Control). Такие системы выпускаются фирмами
с богатой традицией производства высококачественной собственной
микроэлектронной аппаратуры. Однако эти фирмы под влиянием поль-
зователей технологического оборудования, желающих иметь гибкий
интерфейс оператора, предлагают модификацию PCNC-1 с персональ-
ным компьютером в качеств
е терминала (второй вариант). Следующим
шагом в развитии систем с ЧПУ стала реализация двухкомпьютерного
варианта PCNC-2 (третий вариант). Несколько позднее появились сис-
темы PCNC-3, ядро которых реализовано на отдельной плате, устанав-
ливаемой в корпусе промышленного персонального компьютера (чет-
вертый вариант). С бурным развитием микропроцессорной техники
и повышением производительности микропроцессоров все большее
распространение получает однокомпьютерный (пятый) вариант си
стемы
PCNC-4. Наиболее наглядно классификация архитектурных решений
систем ЧПУ приведена в табл. 3.1.
3.1. Системы типа CNC и PCNC-1
К этим типам относится семейство NUM (концерн Schneider, Гер-
мания) рис. 3.1, построенное по принципу многопроцессорных CNC-
систем: с ЧПУ-процессором, процессором программируемого контрол-
лера автоматики и графическим процессором. Система NUM оснащает-
ся пассивным терминалом или промышленным компьютером с опера-
ционной системой Windows-98.
Семейство представлено компактными и модульными версиями,
которые различаются числом координат и возможностью формировать
независимые ка
налы ЧПУ из координатных групп, а также использова-
нием традиционных аналоговых или автономных цифровых следящих
приводов, подключенных к оптоволоконной сети.
В зависимости от требований устанавливается различное число
входов-выходов электроавтоматики. Вычислительная мощность систем
NUM достаточно высока, и этим объясняется широкий набор их функ-
циональных возможностей. Так, предусмотрены сплайновый и полино-
47
миальный (до пятого порядка) алгоритмы интерполяции, пяти-, девяти-
координатная интерполяция, пятикоординатная коррекция инструмента,
одновременная работа по двум различным управляющим программам,
3D-графика. В системах с терминальным компьютером возможна адап-
тация интерфейса оператора к запросам конечных пользователей, диа-
логовое программирование.
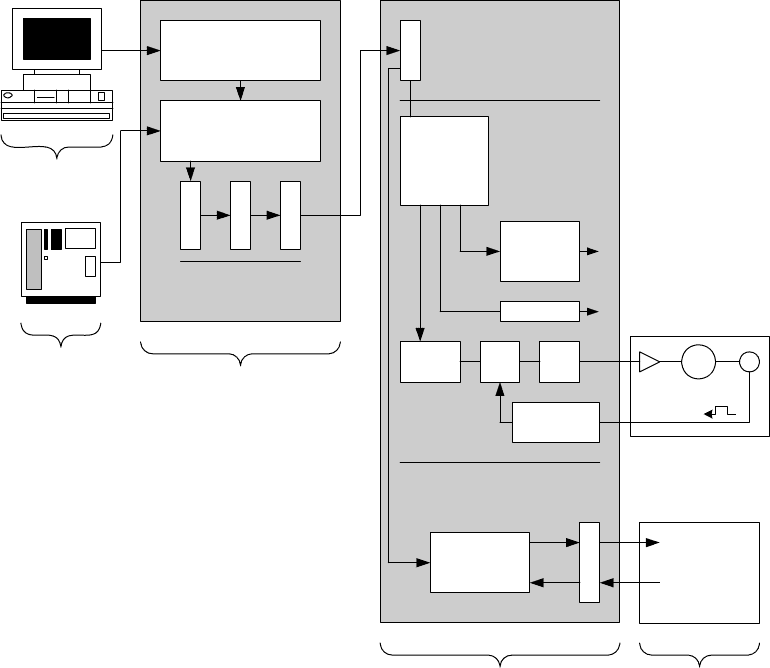
Рис. 3.1. Архитектура системы ЧПУ типа CNC фирмы NUM
Фирма Allen Bradley выпускает широкое семейство систем с ЧПУ:
от традиционной CNC до системы CNC с персональным компьютером
в качестве терминала и системы класса PCNC. Последняя модель
(рис. 3.2) выполнена по классической схеме: специализированный про-
мышленный компьютер с операционной системой Windows NT и воз-
можностью разрабатывать пользовательские приложения на Visual
Basic, PCI-одноплатный ЧПУ-компьютер, выполняющий все функции
ядра, включая программно-реализованный контроллер электроавтома-
тики. С помощью общего для всей системы терминала осуществляется
программирование и редактирование контроллера.
Интерпретатор
Эквидистантная
коррекция
Очередь буферных
кадров
Рабочий кадр
Интерпо-
лятор
Управление
приводами
Коор-
дината Z
Y
X
Обратная
связь
M
Обработка функций
электроавтоматики
Контроллер
автоматики
Выходы
Входы
Периферия
Привод подачи
Фаза управления
Фаза исполнения
Фаза подготовки
Станочные
параметры
Управляющая
программа
48
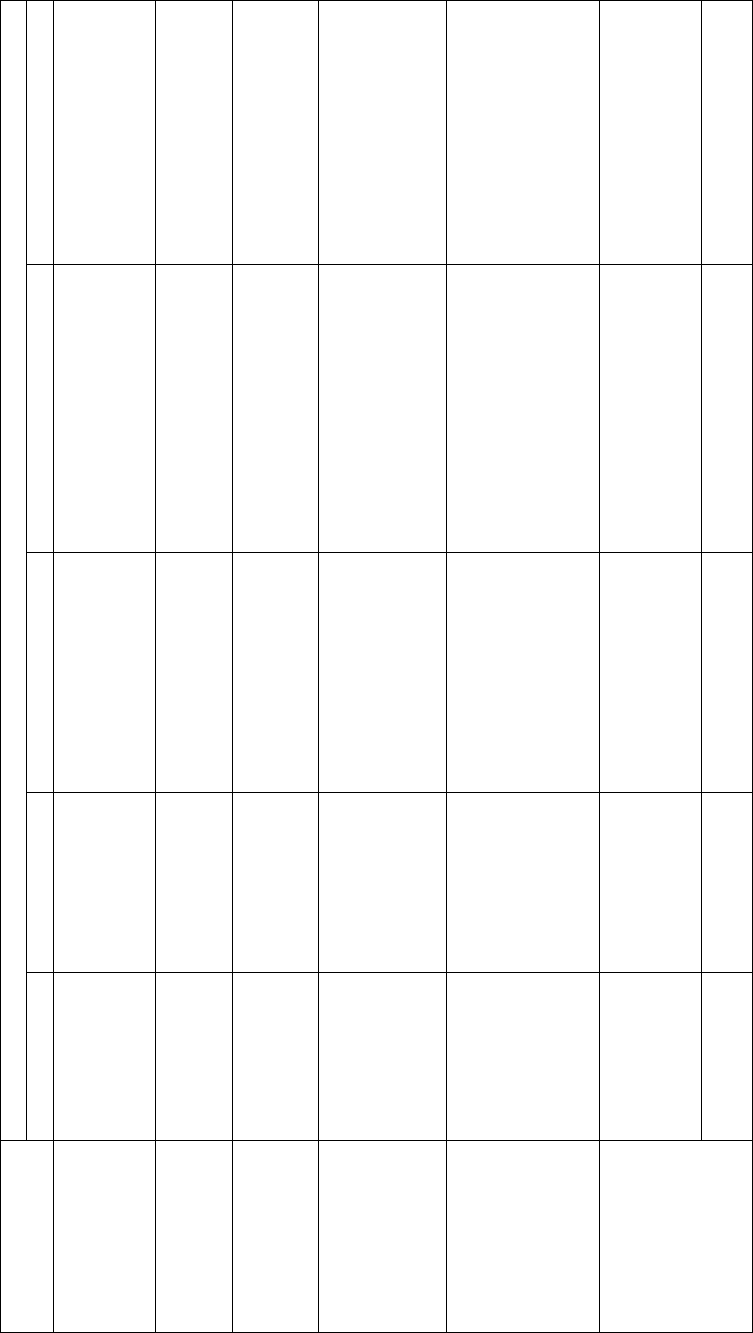
Таблица 3.1
Вычислительное
устройство
Наименование архитектурных решений
CNC PCNC-1 PCNC-2 PCNC-3 PCNC-4
Персональный
компьютер
__
Интерфейс
оператора
Интерфейс
оператора Интерфейс
оператора
Интерфейс оператора.
Ядро ЧПУ. Программно-
реализованный контрол-
лер электроавтоматики
Встроенный
одноплатный
компьютер
__ __ __
Ядро ЧПУ. Программно-
реализованный контроллер
электроавтоматики
__
Интерфейс
__
Коммуникаци-
онный интер-
фейс
Коммуникационный
интерфейс
__
__
Второй
компьютер
__ __
Ядро ЧПУ.
Программно-
реализованный
контроллер
электроавтоматики
__
__
Специальный
процессорный
модуль
Интерфейс
оператора. Яд-
ро ЧПУ.
Внешний кон-
троллер элек-
троавтоматики
Ядро ЧПУ. Од-
ноплатный кон-
троллер элек-
троавтоматики
__ __
__
Интерфейс
Управление
приводами
и электроавтом
атикой
Управление
приводами
и электроавто-
матикой
Периферийные шины
следящих приводов
и электроавтоматики
Периферийные шины
следящих приводов
и электроавтоматики
Периферийные шины
следящих приводов
и электроавтоматики
Объекты
управления
Объекты
управления
Автономные объекты
управления
Автономные объекты
управления
Автономные объекты
управления
49
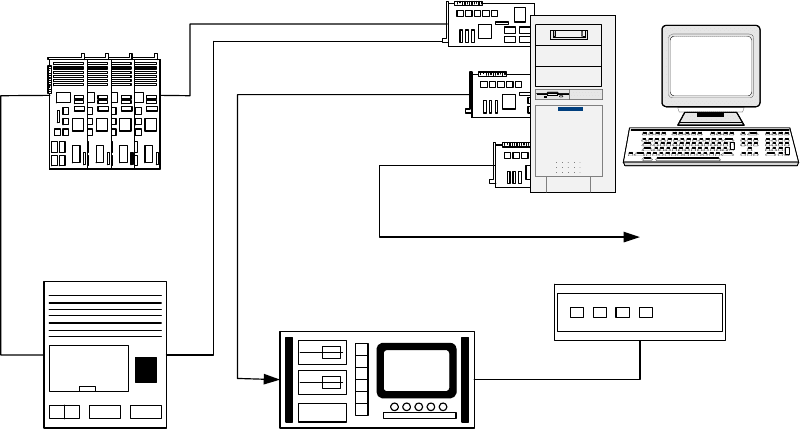
Рис. 3.2. Архитектура системы ЧПУ класса PCNC-1 фирмы Allen-Bradley
3.2. Системы типа PCNC-2
Представителями этого класса являются системы фирм ANDRON,
BoschRexroth. Система ЧПУ фирмы ANDRON (Германия) представляет
собой полный двухкомпьютерный вариант. Ее структура представляет на-
бор модулей (рис. 3.3): терминального компьютера, ЧПУ-компьютера, па-
нели оператора и монитора, удаленных входов-выходов программируе-
мого контроллера, одной или нескольких групп цифровых (SERCOS)
приводов подачи и главного привода. Аппаратная часть системы прак-
тически пол
ностью состоит из компонент других фирм-производителей.
В состав терминального компьютера входят: материнская плата
с процессором Intel Celeron и интегрированными контроллерами SCSI,
VGA, TFT, IDE; многофункциональная интерфейсная плата MFA с па-
мятью CMOS-ROM; контроллер коммуникационного канала, связы-
вающего терминальный и ЧПУ-компьютеры. Все платы установлены на
пассивной ISA-шине. При этом предусмотрена возможность установки
дополнительных резервных плат: внутреннего модема, сетевой платы,
SCSI-платы. Для специальных задач во
зможна установка РСI-плат.
В составе ЧПУ-компьютера имеются: материнская плата с процес-
сором Intel Celeron; плата MIO (Main Input-Output) поддержки как ком-
муникационного интерфейса с терминальным компьютером (со скоро-
стью 10 Мбит/с), так и интерфейса ручного перемещения; плата про-
граммируемого контроллера с интерфейсом InterBus-S (с циклом 4 мс
для 1024 входов-выходов); одна ил
и несколько плат SERCOS-
Панель оператора
Промышленный
компьютер
Контроллер
удаленной
связи
Сетевой
контроллер
автоматики
ЧПУ-
компьютер
Интерфейс привода шпинделя
Входы-выходы автоматики
Интерфейс
приводов подачи
SERCOS-кольцо
50