Гудинов В.Н., Корнейчук А.П. Технические средства автоматизации: Конспект лекций
Подождите немного. Документ загружается.

3.2. Контрольные устройства (датчики)
Датчики – это устройства, реагирующие на параметры технологического
процесса или на изменения режимов работы объекта управления и
осуществляющие преобразование входной контролируемой величины в выходной
сигнал, воспринимаемый САУ. В качестве выходных величин чаще всего
используются: сопротивление (активное, индуктивное, емкостное), ток, ЭДС или
падение напряжения, частота, сдвиг фаз переменного тока. [15,17,31]
Основные характеристики и параметры датчиков:
– Статическая характеристика (зависимость выходного сигнала от входного в
установившемся режиме);
– Диапазон измерений (максимальная и минимальная величина измеряемого
параметра);
– Чувствительность или коэффициент преобразования (отношение приращения
выходного сигнала к изменению входного);
– Порог чувствительности (минимальное значение входного параметра, который
может быть преобразован в выходной сигнал датчика);
– Точность (погрешность измерения);
– Динамические характеристики (время срабатывания, частота изменения
входного сигнала и др.).
Классификация датчиков:
1. По виду входной величины:
– датчики преобразования неэлектрической величины (давления, уровня,
температуры, перемещения и т. п.) в электрический сигнал;
– датчики преобразования одной электрической величины в другую
электрическую величину (тока, напряжения, мощности, фазы и др.).
2. По виду преобразования:
– аналоговые (потенциальные, токовые, частотные, фазовые);
– дискретные (амплитудно-импульсные, частотно-импульсные, логические).
3. По характеру преобразования входной величины в выходную:
– параметрические, когда изменение входной неэлектрической величины
преобразуется в изменение какого-либо электрического параметра выходной цепи
(сопротивления, индуктивности, емкости);
– генераторные, когда входная величина преобразуется в ЭДС на выходе (датчики
термо-ЭДС, пьезоэлектрические, фотоэлектрические, тахометрические);
– частотные, когда различные физические величины на входе (перемещение,
скорость, расход, давление) изменяют частоту переменного тока или частоту
следования импульсов.
4. По структуре построения:
– последовательные, в которых все компоненты датчика от чувствительного
элемента до выходного преобразователя соединены последовательно;
– дифференциальные схемы построения предполагают наличие двух
параллельных ветвей, сигналы с которых подаются на орган сравнения, после
которого полезный выходной сигнал складывается, а помехи вычитаются;
21

– компенсационные, когда входная величина (часто после преобразования)
компенсируется другой величиной, имеющей ту же физическую природу (датчики
с отрицательной обратной связью);
Примеры контрольных устройств.
1. Путевые выключатели (ПВ) – это дискретные элементы автоматики,
обладающие релейной характеристикой и предназначенные доля контроля
положения подвижных частей рабочих машин и механизмов, т.е. для получения
управляющих сигналов в определенных точках пути перемещающегося
механического устройства (суппорта станка, звена манипулятора, дверцы шкафа
электроавтоматики и т.п.). В зависимости от типа коммутирующего устройства
ПВ разделяют на контактные и бесконтактные.
Подробная классификация, принципы действия, конструкции, основные
характеристики и параметры современных ПВ изучаются в лабораторной работе
по данному курсу. [8,17]
2. Устройства контроля скорости (УКС) – устройства для контроля
оборотов вращения подвижных частей машин и выдачи на выходе логического
сигнала в электрической форме, при достижении этими оборотами некоторой
заданной величины.
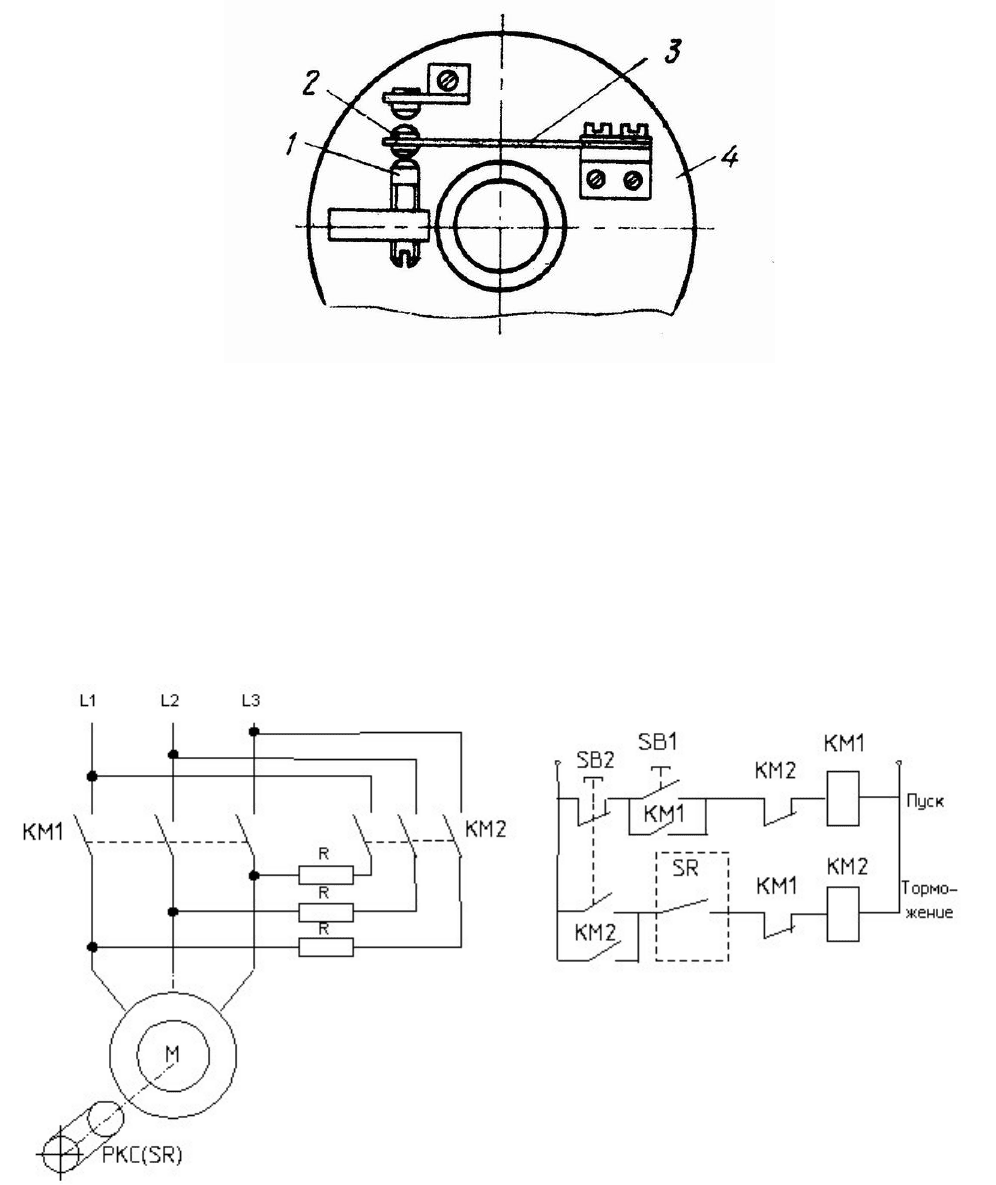
В схемах торможения противотоком асинхронных электродвигателей широко
применяют индукционное реверсивные реле контроля скорости (РКС) (рис. 12). С
валом электродвигателя жестко связывают входной вал реле 5, на котором
установлен цилиндрический постоянный магнит 4. При вращении вала поле
магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора
6. В обмотке наводится ЭДС, величина которой пропорциональна угловой
скорости вала. Под ее воздействием в обмотке появляется ток и возникает сила
взаимодействия, стремящаяся повернуть статор в сторону вращения магнита. При
определенной частоте вращения упор 2 преодолевает сопротивление плоской
пружины и переключает контакты реле 1 и 7 (в зависимости от направления
вращения входного вала).
Рис. 12. Индукционное реле контроля скорости
22
Очень простую конструкцию имеет центробежное РКС (рис.13).
Основанием реле служит пластмассовая планшайба 4, установленная на валу,
скорость вращения которого необходимо контролировать. На ней закрепляются
плоская пружина 3 с массивным подвижным контактом 2 и неподвижный
регулируемый контакт 1. При вращении планшайбы на подвижный контакт
действует центробежная сила, которая при определенной скорости вращения
преодолевает сопротивление пружины и производит переключение контактов.
Рис. 13. Центробежное реле контроля скорости
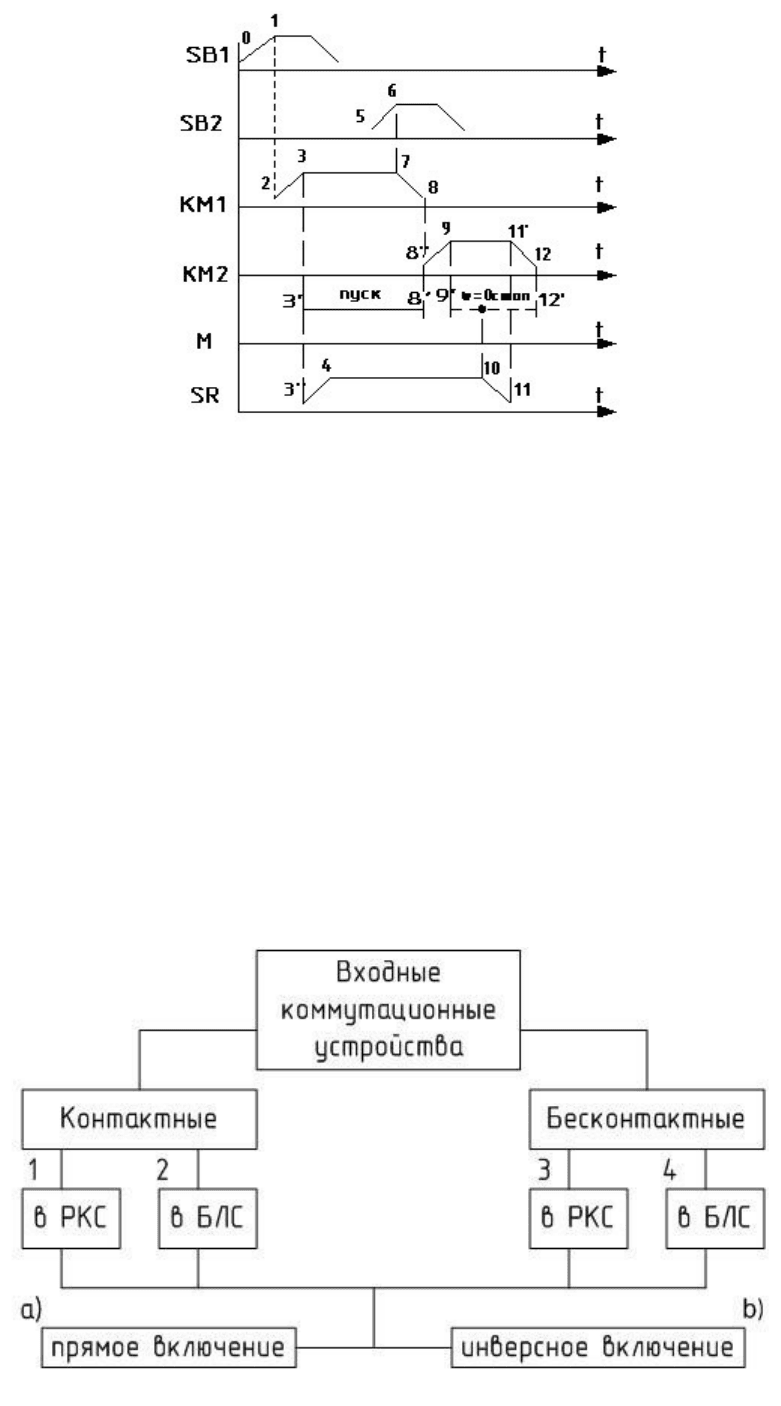
В качестве примера использования РКС на рис. 14 приведены электрическая
принципиальная схема и циклограмма торможения электродвигателя М методом
противовключения, в которой контакты SR реле контроля скорости
предназначены для автоматического отключения контактора торможения КМ2
при нулевых оборотах вала электродвигателя. Для пуска двигателя контактором
КМ1 служит кнопка SB2, а для его останова – кнопка SB1.
а)
23
б)
Рис. 14. Система торможения двигателя методом противовключения:
а – принципиальная схема; б – циклограмма
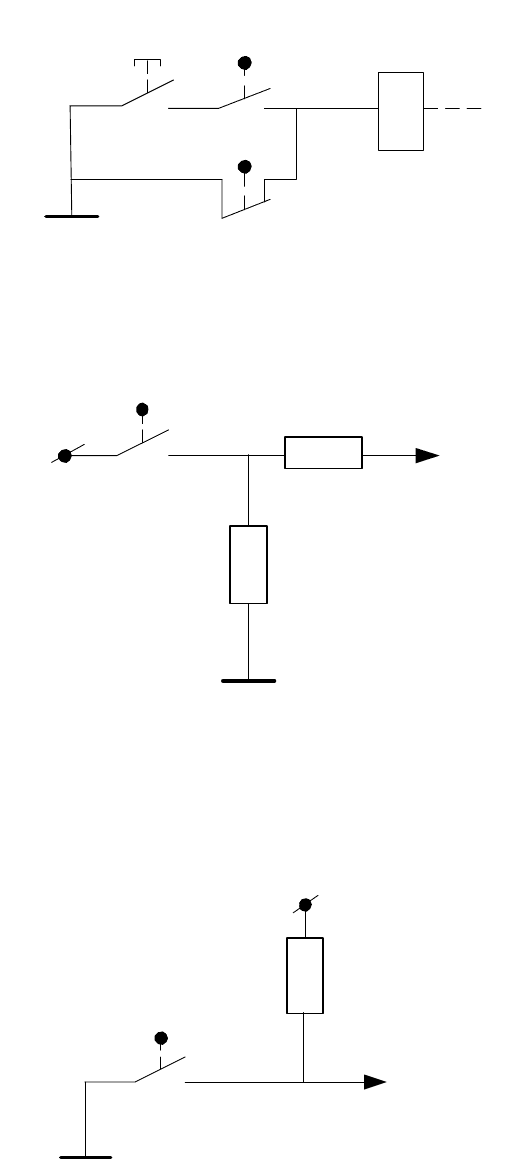
3.3. Основные схемы включения входных устройств в САУ
Большинство вариантов включения входных коммутационных устройств в
системы электроавтоматики можно представить несколькими типовыми схемами
(рис. 15):
Прямое включение (а) означает выдачу в САУ логической единица при
воздействии на входное устройство (например, при нажатии на кнопку
оператором или при наезде на концевой выключатель контролируемым
подвижным объектом).
Инверсное включение (b) означает выдачу в систему логического нуля при
тех же входных воздействиях.
Рис. 15. Схемы включения входных устройств в САУ
24
1. Включение контактных входных устройств в релейно-контактные схемы
(РКС) производится путем непосредственного последовательного и параллельного
соединения их замыкающих (рис.16,а) и размыкающих (рис.16,б) контактов.
SB(a)
SQ(a)
SQ(b)
Рис. 16. Включение контактных концевиков в РКС
2. Включение контактных входных устройств в бесконтактные логические
схемы (БЛС) производится через резисторные схемы согласования (рис. 17 и 18).
R2
R1
- Uï
SQ
ÁËÑ
+ Uï
Рис. 17. Прямая схема включения:
где резистор R1 защищает блок питания при замыкании
концевика и подает нулевой потенциал на БЛС при его размыкании,
а R2 ограничивает входной ток БЛС,
R1
SQ
ÁËÑ
+ Uï
Рис. 18. Инверсная схема включения:
где резистор R1 выполняет все функции предыдущей схемы
25
3. Включение бесконтактных входных устройств в РКС обычно
осуществляется через промежуточные электромагнитные реле, контакты которых
встраиваются в схемы по рассмотренному выше первому варианту.
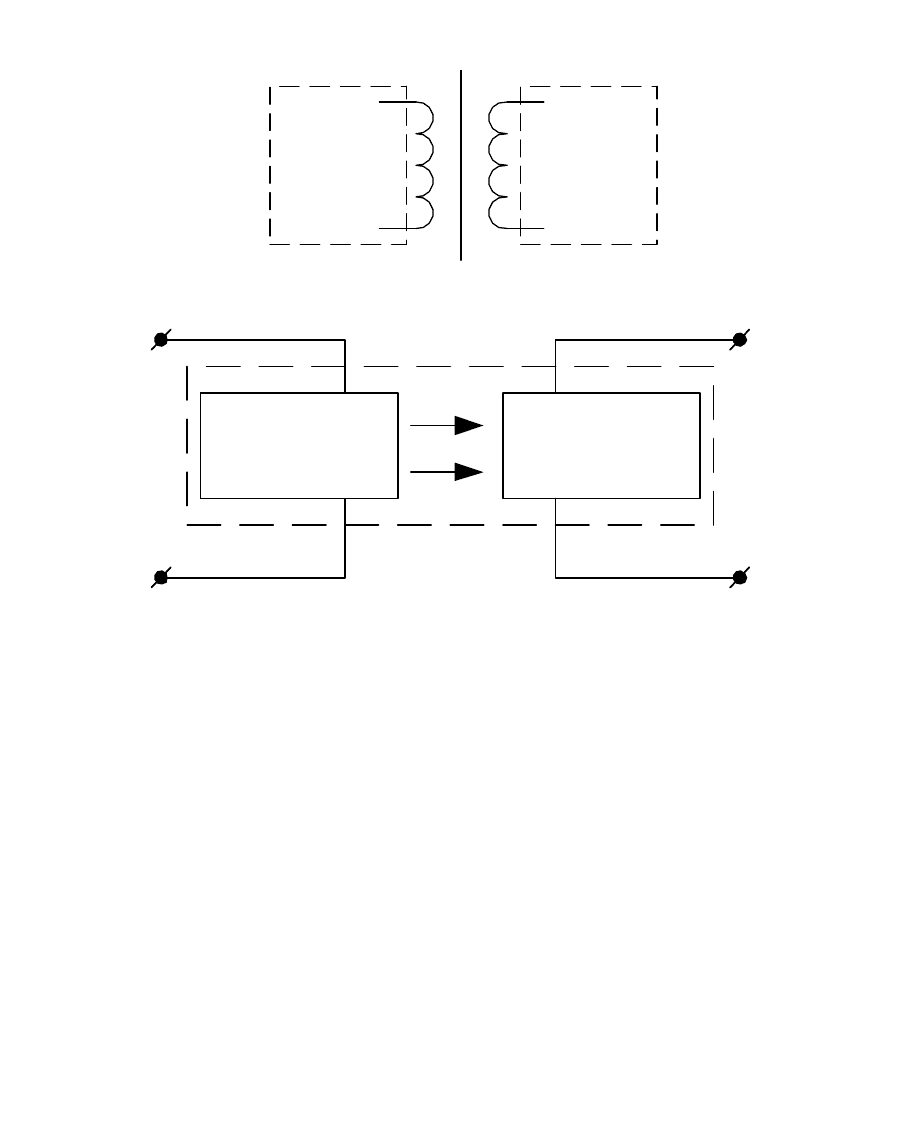
4. Включение бесконтактных входных устройств в БЛС в основном
осуществляется с помощью разделительных трансформаторов (рис.19.) и
оптронных пар (рис. 20).
Ò
Ä ÑÓ
Рис. 19. Разделительные трансформаторы
Èñòî ÷í èê
èçëó÷åí èÿ
Ï ðèåì í èê
èçëó÷åí èÿ
Uâõ Uâûõ
Рис. 20. Оптронная пара
Пример реальной схемы подключении бесконтактного индуктивного путевого
выключателя к БЛС на TTL-микросхемах приведен на рис. 21.
R 1
R 2
R 3
R 4
V T 1
V D 2
C 1
+
V D 3
 õ . " - 2 4 v "
 õ . " + 2 4 v "
+ 5 v
0 v
V D 1
 û õ .
Рис. 21. Оптронная развязка
В схеме резистор R1 задает величину входного тока, необходимую для
обеспечения режима стабилизации элементов VD1 и VD2, а также совместно с
26
конденсатором С1 образует RC-цепочку, увеличивающую время реакции на
передний фронт входного сигнала с целью устранения возможного «дребезга»
этого сигнала. Двуханодный стабилитрон VD1 повышает порог срабатывания по
входной цепи, что необходимо при использовании бесконтактных датчиков с
высоким уровнем остаточного напряжения. Элементы R1, VD1 и VD2 образуют
параметрический стабилизатор напряжения, предназначенный для питания
излучателя оптрона VT1 и светодиода VD3. Кроме того, стабилитрон VD2
осуществляет защиту от пробоя VT1 и VD3 при нарушении полярности входного
сигнала. В качестве гальванической развязки применен транзисторный оптрон
VT1, выходной ключ которого, собранный по схеме с общим эмиттером, выдает
сигнал TTL-уровня.
4. ВЫХОДНЫЕ УСТРОЙСТВА АВТОМАТИКИ
Выходные устройства – это совокупность ТСА, предназначенных для
передачи команд и сигналов управления на исполнительные механизмы и рабочие
органы объекта управления (рис.1.). Помимо этой основной своей функции
выходные устройства могут выполнять и ряд других дополнительных функций:
– усиление сигналов (функция усилителя);
– преобразование информационных сигналов (по виду энергии, по роду тока, по
частоте, по виду и т.п.);
– обеспечение помехозащищенность СУ (фильтрация помех, гальваническая
развязка СУ и ОУ);
– безопасность обслуживающего персонала.
Примеры выходных устройств.
4.1. Контакторы – аппараты, предназначенные для коммутации силовых
цепей электродвигателей, трансформаторов, нагревателей и других мощных
потребителей электроэнергии. Они имеют главные силовые контакты, снабженные
системой дугогашения, вспомогательные блок-контакты, электромагнитный
привод и дополнительные элементы (корпуса, монтажа).
По роду коммутируемого тока контакторы делят на контакторы постоянного
и переменного тока. Как правило, род тока в цепи управления, которая питает
электромагнитный привод, совпадает с родом тока главной коммутируемой цепи.
Однако известны случаи, когда катушки контакторов переменного тока получают
питание от цепи постоянного тока.
Конструктивная схема контактора постоянного тока показана на рис. 22.
Контактный узел рычажного типа состоит из неподвижного 1 и подвижного 3
контактов. Контакт 3 шарнирно закреплен на рычаге 4, связанном с якорем
электромагнита 6, и прижат к нему нажимной пружиной 5. Подвод тока к
подвижному контакту осуществляется гибкой медной лентой 10.
Электромагнитный привод клапанного типа состоит из сердечника 8, электро-
магнитной катушки управления 9 и возвратной пружины 7. Конструкция
27
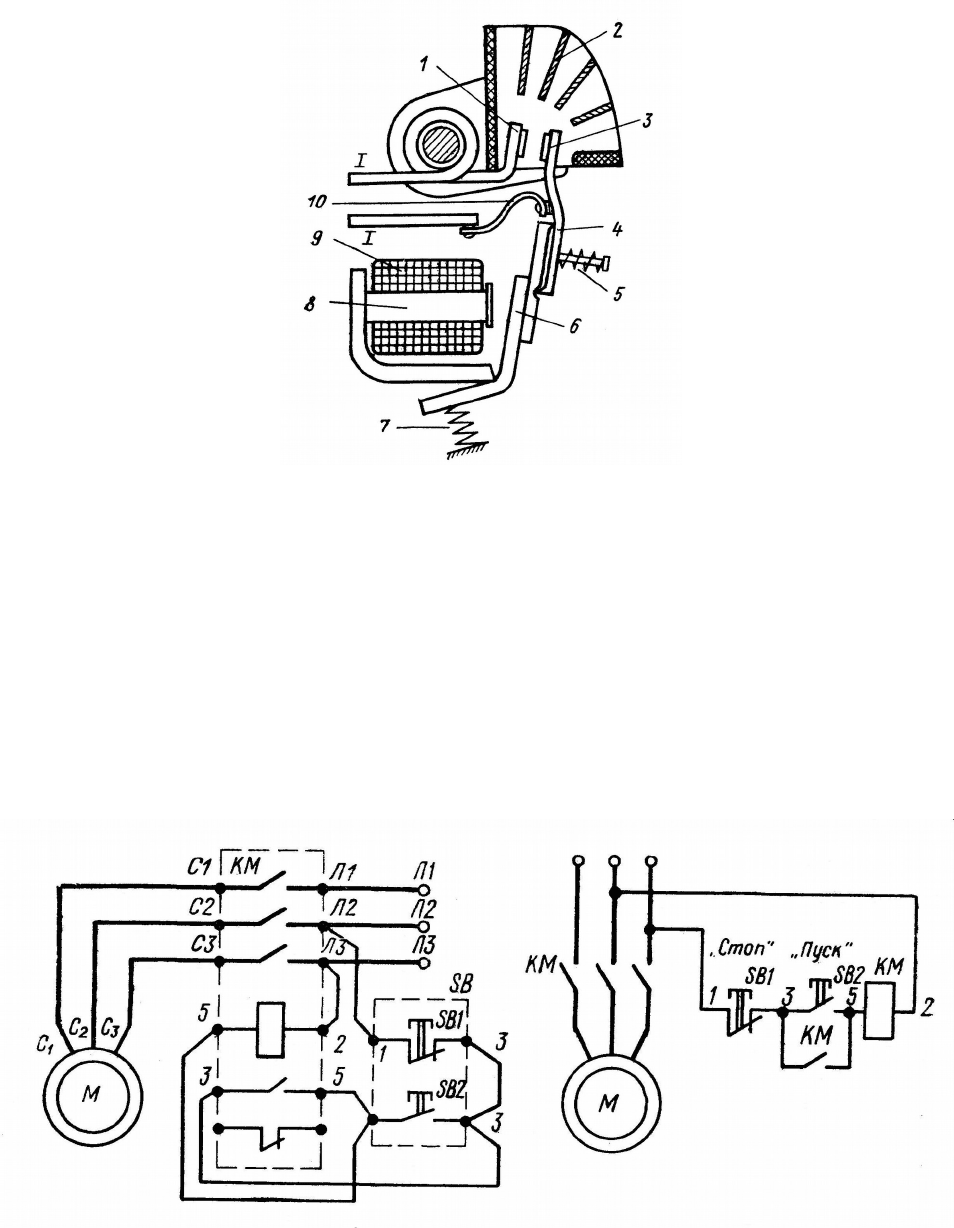
контактного узла контактора обеспечивает работу контактов с проскальзыванием
и перекатыванием и имеет комбинированную дугогасительную систему 2.
Рис. 22. Контактор постоянного тока
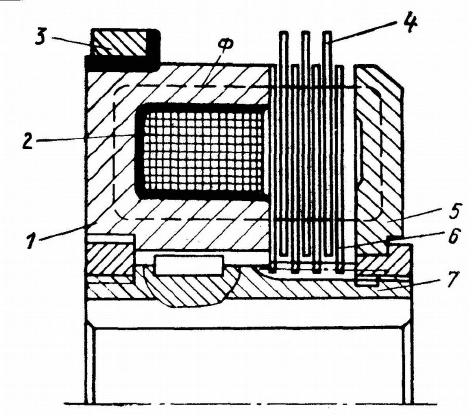
4.2. Магнитные пускатели – это контакторы, применяемые для управления
асинхронными электродвигателями. Магнитный пускатель представляет собой
комплект электротехнических аппаратов для дистанционного управления
электродвигателями и кроме самого контактора часто имеет кнопочную станцию и
аппараты тепловой и токовой защиты. На рис. 23. показаны соответственно
монтажная (слева) и принципиальная (справа) электрические схемы
нереверсивного магнитного пускателя, для ручного дистанционного управления
электродвигателем М с помощью кнопочной станции SB. На монтажной схеме
границы одного аппарата обведены штриховой линией.
Рис. 23. Схемы нереверсивного пускателя
На принципиальной схеме все элементы одного аппарата имеют одинаковые
буквенно-цифровые обозначения. Такой разнесенный метод представления
28
позволяет не связывать вместе условные изображения катушки контактора и
контактов, добиваясь наибольшей простоты и наглядности схемы.
Для включения электродвигателя М необходимо кратковременно нажать
кнопку SB2 «Пуск». При этом по цепи катушки контактора (2-5) потечет ток,
якорь притянется к сердечнику и это приведет к замыканию главных контактов в
цепи питания электродвигателя (Л1-Л2-Л3). Одновременно замкнется
вспомогательный контакт (3-5), что создаст параллельную цепь питания катушки.
Если теперь кнопку «Пуск» отпустить, то катушка контактора будет включена
через собственный вспомогательный контакт. Такую схему называют схемой
самоблокировки, которая обеспечивает так называемую нулевую защиту
электродвигателя. Если в процессе работы электродвигателя напряжение в сети
исчезнет или значительно снизится, то контактор отключается и его
вспомогательный контакт размыкается. После восстановления напряжения для
включения электродвигателя необходимо повторно нажать кнопку «Пуск».
Нулевая защита предотвращает непредвиденный, самопроизвольный пуск
электродвигателя который может привести к аварии. Для отключения
электродвигателя достаточно нажать кнопку SB1 «Стоп». Это приводит к
размыканию цепи самопитания и отключению катушки контактора.
4.3. Электромагнитные муфты – исполнительные электромеханические
устройства, служащие для дискретного управления механическим приводом
станков и рабочих машин (передачи крутящих моментов между валами). [25]
На рис. 24 показана схема муфты серии ЭТМ с магнитопроводящими
фрикционными дисками. В корпусе 1 размещена намагничивающая катушка 2, ток
к которой подводится через контактное кольцо 3 и щетку, помещенную в
щеткодержатель. Другой зажим катушки подключают к источнику питания по-
стоянного тока через корпус муфты.
Рис. 24. Электромагнитная контактная дисковая муфта
29
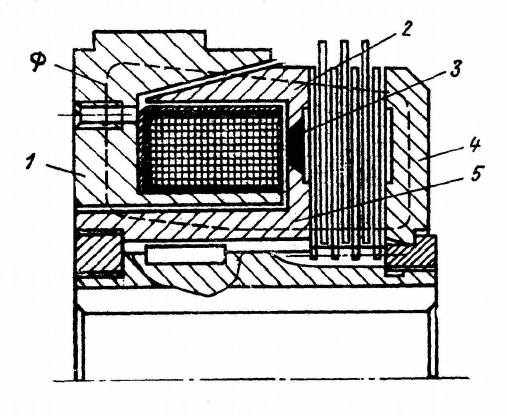
При включении муфты магнитный поток Ф, созданный током,
протекающим
по виткам катушки, проходит через корпус, пакет внутренних 6 и наружных 4
дисков и замыкается через якорь 5. Якорь притягивается к корпусу и сжимает
диски, в результате муфта передает крутящий момент. Все детали муфты
монтируют на втулке 7, которую устанавливают на валу.
Расцепление муфты после отключения катушки от источника питания
происходит за счет упругости наружных дисков, имеющих волнистую форму.
Пакет фрикционных дисков отдаляет якорь от корпуса (сердечника) муфты и тем
самым увеличивает магнитное сопротивление магнитной цепи.
Сталь, из которой изготавливают диски, должна иметь хорошие фрикционные
свойства, большую механическую износостойкость и высокую магнитную
проницаемость при малой остаточной индукции.
На рис. 25 приведена конструкция электромагнитной бесконтактной муфты,
в которой намагничивающая катушка расположена на неподвижной части корпуса
1, отделенной от вращающейся части двумя воздушными зазорами. Вращающаяся
часть магнитопровода состоит из стальных деталей 2 и 5, являющихся полюсами
сердечника, разделенных немагнитной прокладкой 5. Этим обеспечивается про-
хождение магнитного потока Ф через сердечник в якорь 4.
Рис. 25. Электромагнитная бесконтактная муфта
Бесконтактная муфта не имеет щеточного узла. Воздушный зазор уменьшает
нагрев катушки теплом, выделяемым пакетом фрикционных дисков во время
работы муфты. Все это повышает ее надежность. Недостатком муфты является
повышенная намагничивающая сила срабатывания, связанная с увеличенным
воздушным зазором.
5. ТСА ЦЕНТРАЛЬНОЙ ЧАСТИ
(УСТРОЙСТВА ОБРАБОТКИ ИНФОРМАЦИИ)
Устройства обработки информации – это совокупность ТСА,
предназначенных для приема информации со стороны входных устройств, ее
30