Губарев А.П., Левченко О.В. (сост.) Методичні вказівки до лабораторних робіт з курсу Програмовані контролери в системах керування гідропневмоавтоматики. Частина 1
Подождите немного. Документ загружается.

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ “КПІ”
Затверджено
на засіданні кафедри прикладної гідроае-
ромеханіки і механотроніки
Протокол №04 від 09.03. 2005р.
МЕТОДИЧНІ ВКАЗІВКИ
ДО ЛАБОРАТОРНИХ РОБІТ З КУРСУ
“ПРОГРАМОВАНІ КОНТРОЛЕРИ В СИСТЕМАХ КЕРУВАННЯ
ГІДРОПНЕВМОАВТОМАТИКИ”
(ЧАСТИНА 1)
СТУДЕНТАМ, ЩО НАВЧАЮТЬСЯ ЗА ФАХОМ
“ГІДРАВЛІЧНІ І ПНЕВМАТИЧНІ МАШИНИ”
Київ - 2005
Методические указания к лабораторным работам по дисциплине “Програм-
мируемые контроллеры в системах управления гидропневмоавтоматики
(часть 1), студентам механикам специальности “Гидравлические и пневма-
тические машиы”, специализации „Гидропривод и гидропневмоавтоматика”
(Составители А.П.Губарев, О.В.Левченко.– Киев, НТУУ “КПИ”, 2005.- 48 с.)
Составители: А.П.Губарев, О.В.Левченко
Ответственный редактор: О.М. Яхно
Рецензенты: А.В.Узунов, В.А.Ковальов
2
ВВЕДЕНИЕ
Вопросы программирования логических контроллеров PLC постоянно
присутствуют в современных средствах автоматики самых различных систем
производственного, вспомогательного, специального или бытового назначе-
ния. Часто контроллеры используются совместно с гидравлическими и пнев-
матическими средствами автоматики. Особенность такого симбиоза, при ис-
пользовании как контроллеров, так и гидравлических и пневматических при-
водов в общих системах, лежит в двух плоскостях. Во-первых – это следст-
вие различных свойств контроллеров и средств гидропневмоавтоматики, и
во-вторых – различные традиции разработчиков программ и разработчиков
гидравлических и пневматических схем. Результатом такой особенности яв-
ляется появление дополнительных трудностей, которые не имеют под собой
объективных причин, но формируются разработчиком при попытке подчине-
ния гидропневмоавтоматики контроллеру или контроллера гидропневмати-
ческой системе.
Настоящие методические указания направлены на формирование такого
подхода у разработчика, при котором отмеченная сложность не только ус-
пешно преодолевается, но, по возможности, не возникает.
В первой части Методических указаний, решение общих и некоторых
специфических для средств гидропневмоавтоматики вопросов, рассмотрено
на примере контроллеров фирмы FESTO “FPC-404” и “FPC-405” с исполь-
зованием алгоритмического языка РКС (релейно-контактных схем). Во вто-
рой части методических указаний аналогичные задачи будут рассмотрены с
применением контроллеров FESTO-compact и FESTO-standart и алгоритми-
ческого языка STL.
Основным результатом выполнения лабораторных работ должны быть
навыки составления и отладки программ при согласованном применение
средств программирования и средств гидропневмоавтоматики при решении
практических задач средней сложности. Полученные навыки могут быть
применены и в случае использования других алгоритмических языков и про-
граммируемых контроллеров.
3
Лабораторная работа №1
Среда программирования «Festo» на примере
“FST 404 v3.0”
Цель работы:
Ознакомиться со средой программирования «Festo».
1.1. Общие сведения
Прежде, чем перейти к непосредственному знакомству со средой про-
граммирования, необходимо конкретизировать те задачи и те трудности, ко-
торые прийдется решать и преодолевать при разработке практических сис-
тем. Специфика объединения гидропневматических устройств в систему с
программируемыми контроллерами и управляющими программами состоит в
следующем:
• Цикличность:
o цикличность действий каждого привода и исполнительного уст-
ройства;
o цикличность как следствие периодического выпуска продукции;
o цикличность как критерий необходимых и достаточных состоя-
ний и переходов.
• Приводы и исполнительные устройства:
o широкий разброс времен отработки команд;
o наличие альтернативных путей физических процессов;
o соизмеримая длительность переходных и стационарных состоя-
ний;
o неявное выполнение логических функций устройствами и приво-
дами;
o совмещение функций обработки информации и управления в од-
ном устройстве.
• Система:
o «непереинсталлируемость» энергоемких цикловых систем;
o замена задачи структурного синтеза на структурную модерниза-
цию;
o частичное выполнение информационных функций устройствами
энергообеспечения, настройки, управления, а также приводами;
o физическая разнородность элементного состава;
o технологическая асинхронность приводов и устройств системы.
Задачей разработчика является учет перечисленных особенностей в ал-
горитмах управляющих программ. Сложность задачи состоит в том, что осо-
бенности составляют систему, а необходимый результат – программа –
должна удовлетворять им не «теоретически», а конструктивно – для решения
практических задач.
Также необходимо учитывать специфику программируемых контролле-
ров, такую, как наличие одного процессора, возможность «мгновенного» из-
менения значений переменных, которым соответствуют длительные гидрав-
4
лические, аеродинамические и другие процессы. Это приводит к необходи-
мости согласования алгоритмов управления с алгоритмами функционирова-
ния, элементами которых являются гидравлические, гидродинамические, аэ-
родинамические, термодинамические и другие процессы, связанные с рабо-
той гидравлической и пневматической аппаратуры.
Например, в зависимости от изменения условий эксплуатации и режимов ра-
боты системы, а также износа конструкций, в системах могут происходить
качественные изменения протекающих в них процессов, обусловленные та-
кими явлениями, как кавитация, гидравлический удар, докритическое и кри-
тическое истечение газа, ламинарный и турбулентный режимы течения и др.
Для каждого такого явления имеется характерный параметр (гидравлический
удар – время распространения волны малых возмущений, кавитация - давле-
ние насыщенных паров) или их соотношение (режим течения - критерий
Рейнольдса), которые выполняют роль границы процесса. Переход через гра-
ницу сопровождается заменой факторов, управляющих физикой процесса.
Алгоритм управляющей программы должен учитывать возможность измене-
ний в такой степени, что бы они не нарушали работу системы. При этом про-
грамма должна быть максимально простой и компактной, что связано с ее
эксплуатационными характеристиками. Например, изменение режима тече-
ния рабочей жидкости гидропривода, может быть вызвано разными факто-
рами: разогревом жидкости, выходом из строя фильтра, вибрациями, измене-
нием окружающей температуры, заменой рабочей жидкости и др. Переход от
ламинарного режима течения жидкости к турбулентному изменит зависи-
мость потерь давления от скорости. Если давление задано как технологиче-
ский параметр (усилие), то сменой режима течения будет вызвано изменение
другого технологического параметра - скорости. Окажется, что при включе-
нии системы быстрее срабатывает один привод, а после нескольких минут
эксплуатации жидкость нагрелась и вязкость изменилась на величину, доста-
точную для смены режима течения:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=Δ⇒<
<⇐=Δ
275,1
25,3
4/1
2
4
158,0
ReRe
ReRe
32
прпркр
крпрпр
DV
d
l
p
DV
d
l
p
ρ
ν
ρ
ν
Если перепад давления
Δ
p (сила) поддерживается постоянным (с помощью
клапана давления), то второй привод будет срабатывать то раньше первого,
то позже него. На практике – это изменение порядка действий устройств и
изменение логики работы системы. Но эта логика не противоречит ходу тех-
нологического процесса, то есть возможность гибкой логики просто надо
учесть при составлении программы.
Например, запись в алгоритме программы
Y1=Y1+0.065
5
приведет к изменению значения переменной Y1 к началу следующей строки
программы. Но если Y1 это координата выходного звена привода, то к нача-
лу обработки программой следующей строки привод даже не получит сигнал
с выхода контроллера на включение движения. А изменение координаты на
0,065 метра произойдет за время, которое зависит и от давления, и от нагруз-
ки, и от конструкции привода, и от многих других факторов. Моделировать
такой процесс в контроллере не реально, но учесть возможность разного
времени срабатывания привода, возможно.
Среда “FST 404 v3.0” предназначена для программирования контролле-
ров “FPC – 404”, “FPC – 405” фирмы “Festo”, с помощью которых осуществ-
ляется программируемое управление работой систем электро-гидро-
пневмоавтоматики различной сложности и назначения.
Данный пакет предназначен для работы в операционной системе MS-
DOS. Вместе с тем, навыки написания и отладки программ с применением
языков программирования, используемых в “FST 404 v3.0”, являются обще-
применимыми и в случае использования других типов контроллеров с анало-
гичными алгоритмическими языками проектирования.
Для того, чтобы научиться создавать программы для управления кон-
троллерами, сначала следует ознакомиться с основными меню представлен-
ными в главном окне среды “FST 404 v3.0” , а также ознакомиться с такими
понятиями как проект, программа и уяснить различия между ними.
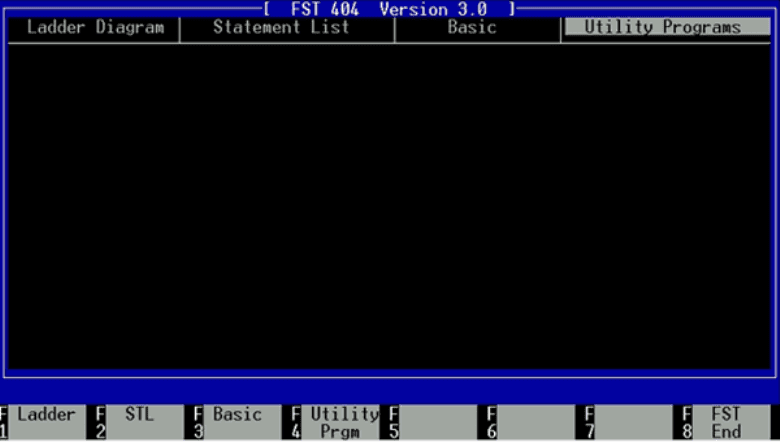
После запуска файла fst404.com на экране монитора появляется заставка
с информацией о версии данного пакета и после нажатия любой клавиши от-
крывается главное окно среды программирования “FST 404” (рис.1.1.).
Рис. 1.1. Главное окно пакета “FST 404”
В нижней части окна представлена вспомогательная панель, на которой
представлены названия функциональных клавиш, которые могут быть задей-
ствованы в данном окне, а справа от них высвечиваются название либо дей-
6
ствие, которое вызовет нажатие на соответствующую клавишу, либо меню,
которое откроется при нажатии на соответствующую клавишу.
В верхней части окна представлено меню, каждый пункт которого от-
крывает соответствующее подменю. Так пункт Ledder Diagram (функцио-
нальная клавиша F1) открывает подменю редактора языка COP, пункт
Statement List (функциональная клавиша F2) открывает подменю редактора
языка AWL, пункт Basic (функциональная клавиша F3) открывает подменю
редактора языка FST-Basic, пункт Utility Programs (функциональная клавиша
F4) открывает подменю общих настроек.
Нажатие функциональной клавиши F8 приведет к выходу из среды FST
в MS-DOS.
1.2. Перечень подпунктов основного меню, выполняемые действия и
функции
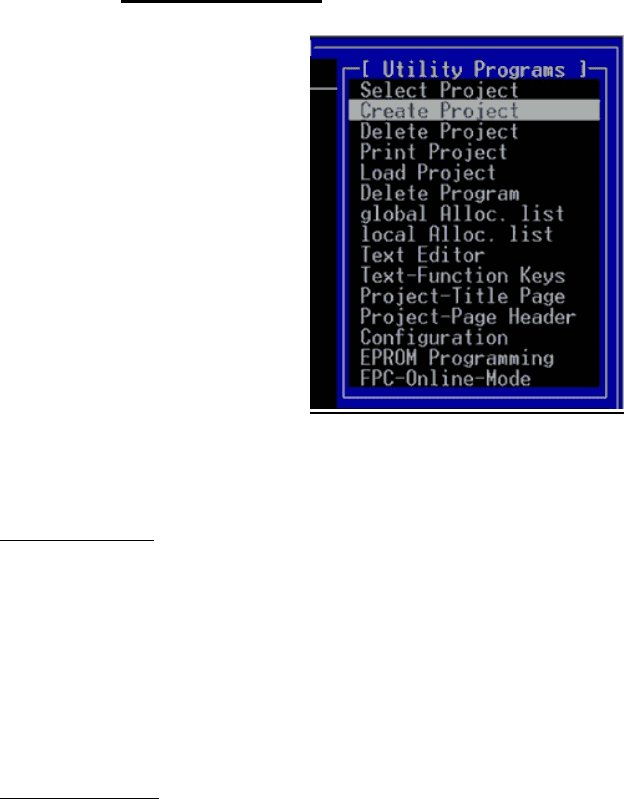
Utility Programs
Рис. 1.2. Подменю Utility Programs
Select Project
(Выбор проекта)
Данный пункт меню при нажатии клавиши Enter вызвает список суще-
ствующих проектов, из которого предлагается выбрать тот, с которым поль-
зователь предполагает работать. После выбора проекта в левом нижнем углу
главного окна высвечивается название и задание проекта. Далее при работе с
редакторами программ в списках предлагаемых к редактированию программ
будут предлагаться только те, которые относятся к данному проекту.
Create Project
(создание проекта)
Данный пункт меню позволяет создать новый проект. При нажатии кла-
виши Enter появляется окно, в котором требуется ввести название проекта, и
после нажатия клавиши Enter его задание. Затем следует нажать функцио-
нальную клавишу F1, после чего проект будет создан и автоматически вы-
7
бран для редактирования. В левом нижнем углу главного окна появится его
название и задание.
Следует отметить, что сам проект является как бы папкой, в которой
хранятся программы, подпрограммы и блоки, которые в целом предназначе-
ны для выполнения одной поставленной задачи. Один проект может содер-
жать множество программ, подпрограмм и блоков, которые доступны для ре-
дактирования только тогда, когда для работы выбран проект, в котором они
находятся.
Delete Project
(удаление проекта)
Данный пункт меню позволяет удалить выбранный проект. При нажатии
клавиши Enter появляется окно с перечнем существующих проектов. После
выбора проекта и нажатии клавиши Enter появляется предупредительный во-
прос. При нажатии клавиши “N”, проект не будет удалён, а пользователь
вернётся в главное меню. Если же будет нажата клавиша “Y”, проект будет
удалён. Следует быть внимательным, поскольку вернуть удалённый проект
невозможно.
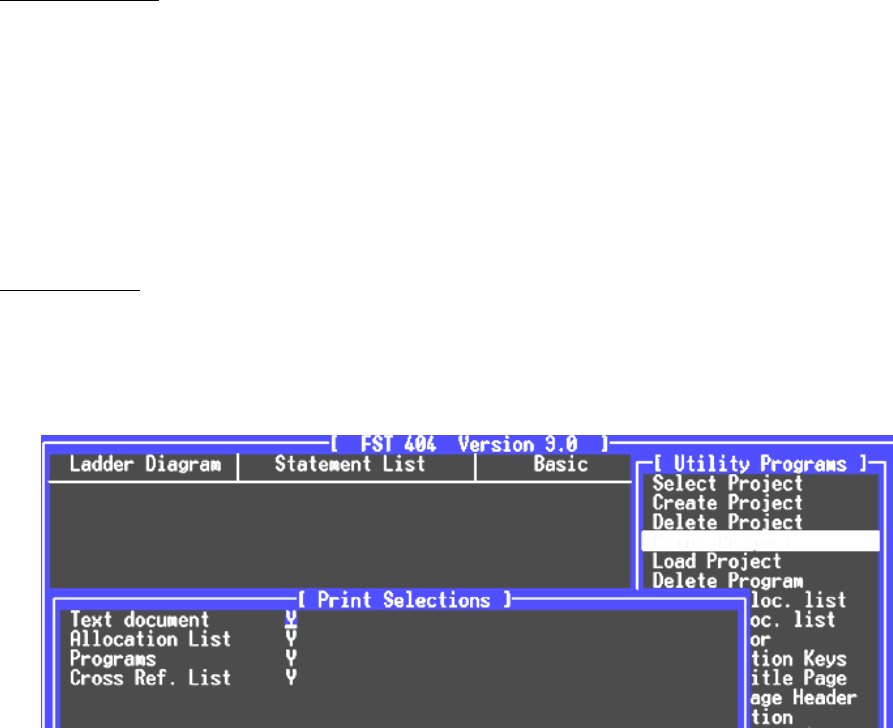
Print Project
(распечатать проект)
Данный пункт позволяет распечатать на принтере текстовые документы,
в которых будет отображена информация о выбранном проекте. При нажатии
клавиши Enter появится окно выбора распечатываемых материалов (рис.1.3.).
Рис. 1.3. Окно выбора распечатываемых материалов
В распечатку могут входить:
- Text document (текстовый документ). Документ, который может
быть создан в Text Editor (текстовом редакторе) и который со-
держит пояснительную информацию о проекте, его задачах и т.д.
- Allocation List (список распределения). Список задействованных
входов/выходов контроллера, а также присвоенных им перемен-
ных.
- Programs (программы). Текст выбранной программы (программ).
- Cross Ref. List (список перекрёстных ссылок).
8
Справа от пункта списка должно быть проставлено значение “Y” (Да)
или ”N” (Нет), которое определяет, будет ли распечатан данный пункт или
нет. После выбора нужных пунктов следует нажать функциональную клави-
шу F1. Пользователю будет предложено окно со списком программ данного
проекта. Выбор программ, по которым будет распечатана информация, осу-
ществляется клавишей Enter (слева от названия выбранной программы появ-
ляется символ “∗”). Далее следует нажать функциональную клавишу F1 для
распечатки либо Esc для отмены и возврата в главное меню.
Load Project (загрузить проект)
Данный пункт позволяет загрузить в контроллер одну или несколько
программ из данного проекта. После нажатия клавиши Enter появляется спи-
сок программ данного проекта. Выбор программ осуществляется как и в пре-
дыдущем меню клавишей Enter (слева от названия выбранной программы
появляется символ “∗”). Далее после нажатия происходит автоматическая
проверка синтаксиса выбранных программ. В случае наличия синтаксических
ошибок в одной из программ появляется окно с информацией о том, в какой
программе была найдены ошибки и в какой строке. Если же ошибок обнару-
жено не было, то происходит соединение с контроллером и загрузка про-
грамм.
Delete Program
(удаление программы)
Данный пункт позволяет удалять программу/программы в текущем про-
екте. Выбор программ осуществляется клавишей Enter (слева от названия
выбранной программы появляется символ “∗”). После выбора программы и
нажатии клавиши Enter появляется предупредительный вопрос. При нажатии
клавиши ”N”, программа не будет удалена, а пользователь вернётся в главное
меню. Если же будет нажата клавиша “Y”, программа будет удалена. Следует
быть внимательным, поскольку вернуть удалённую программу невозможно.
Global Alloc. List
(общий список распределения)
Общий список распределения содержит все операнды которые относятся
к данному проекту. Каждый проект может иметь только один общий список
распределения.
Операнды могут вводиться в список двумя путями:
- через редактор языка AWL (Ledder Editor)
- через меню Utility Programs\ Global Alloc. List
9

Local Alloc. List (локальный список распределения)
Локальный список распределения содержит все операнды, допустимые
для специального центрального контрольного устройства (CCU).
Каждый CCU имеет свой собственный список распределения для ло-
кальных операндов. Так, для каждого из 6 возможных центральных кон-
трольных устройств (CCU0…CCU5), может существовать по 6 локальных
списков распределения.
Text Editor
(текстовый редактор)
Текстовый редактор позволяет создавать текстовый документ, в котором
можно дать описание о работе проекта, отдельных его программ, блоков, а
также предоставить любую другую вспомогательную информацию.
Text – Functions Keys
(функциональные клавиши для текстового редактора)
При нажатии клавиши Enter вызывается окно, в котором представлены
функциональные клавиши для текстового редактора. Данный список можно
изменять по своему усмотрению. Функциональной клавишей F7 вызывается
окно подсказки.
Project – Title Page
(титульный лист проекта)
Редактор создания титульной страницы проекта, которая будет распеча-
тываться вместе с информацией о проекте. Сохраняется в папке проекта в
файле с расширением .DOC. Функциональной клавишей F7 вызывается окно
подсказки. Также перемещение по странице возможно при помощи указан-
ных на нижней панели функциональных клавиш.
Project – Page Header
(колонтитул проекта)
Редактор, позволяющий создать колонтитул, который будет печататься
на каждой странице с информацией о проекте при печати с помощью меню
Print Project. Функциональные клавиши такие же, как и в предыдущем меню.
Configuration
(конфигурация)
Данный пункт меню позволяет настроить порт соединения компьютера с
контроллером, а также настраивать параметры подключения принтера.
EPROM Programming
(EPROM программирование)
Может произойти такой случай, когда в контроллер была загружена ра-
нее проверенная программа, которая была затем исправлена, дополнена и за-
гружена в контроллер с тем же именем, но предварительно не проверенная.
Для исправления такой ситуации служит режим EPROM Programming, кото-
рый позволяет проверить уже загруженную в контроллер программу.
FPC – Online – Mode
(режим подключения контроллера)
10