Фрагин М.С. Регулирование и маслоснабжение паровых турбин: настоящее и ближайшая перспектива
Подождите немного. Документ загружается.


Глава 8 ____________________________________ 91
"входы" подаются воздействия от регуляторов электронной
части. На моторный задатчик ЗРС - от РI-регулятора частоты
и активной мощности или давления свежего пара, на моторный
задатчик РД - от PI-регулятора давления пара в отборе, на
ЭГП-1,2 - от быстродействующего ограничителя мощности и
т.д. Объём регуляторов и их функции в целом соответствуют
системам предыдущего поколения [К12, К13]. Отличия - в
большей надёжности гидравлических узлов, более высоком
быстродействии (за счёт дополнительных ЭГП), удобстве
встраивания в систему всевозможных защитных клапанов со
своими регуляторами. Достоинством схемы "а" является
меньшая зависимость от качества применяемой аппаратуры,
что очень важно, когда знаний об аппаратуре при проекти-
ровании недостаточно. Так, например, в нашей практике в одной
из модификаций аппаратуры, установленной на электростанции,
оказалось, что при малых отклонениях на входе электронные
регуляторы реализуют вместо PI-закона только I-закон, что не
было указано при согласовании и потребовало для исключения
возникавших качаний коренной переработки алгоритмов
регулирования, но только тех параметров, которые не имели
наряду с электронными регуляторами также механических
регуляторов.
Схема "в" состоит только из сервомоторов регулирую-
щих клапанов со своими ЭГП. В качестве примера на рис. 8.1 и
8.3 показана такая схема регулирования для конденсационной
турбины с промперегревом. На входы соответствующих ЭГП
действуют PI-регуляторы. Конечно, в этой схеме они физически
могут быть более быстрыми и более соответствовать PI-закону,
чем при реализации через моторные задатчики. Чтобы удобнее
было выстраивать иерархию управления регулирующими
92 ___________________________________ Глава 8
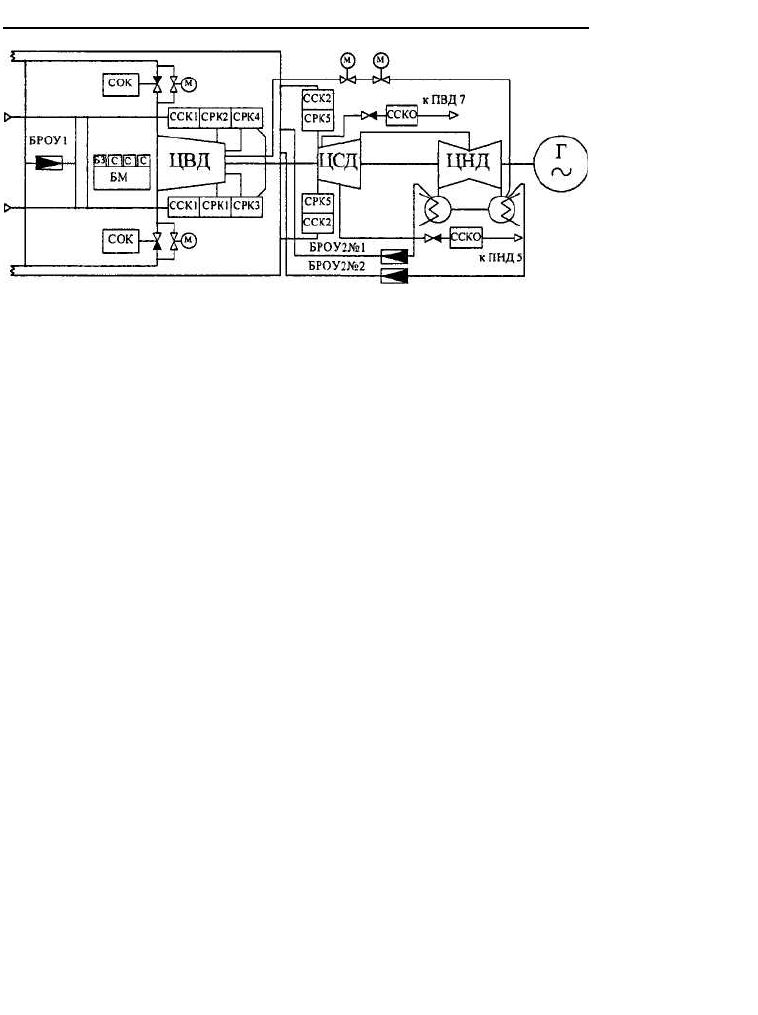
Рис. 8.1. Схема расположения узлов регулирования:
ССК - сервомотор стопорного клапана, СРК - сервомотор регулирующего
клапана, ССКО - сервомотор стопорного клапана отбора, СОК - сервомо-
тор обратного клапана, БРОУ - быстродействующее редукционно-охлади-
тельное устройство, БМ - блок маслоснабжения, БЗ - блок защиты,
С - сумматор
органами при сложных алгоритмах управления и производить
переключение алгоритмов, которые могут действовать через
эти сервомоторы, целесообразно применение позиционеров,
которые обеспечивают поддержание заданного положения
сервомотора с электрической обратной связью по положению
сервомотора, т.е выполнять электрогидравлический сервомотор
для привода каждого клапана.
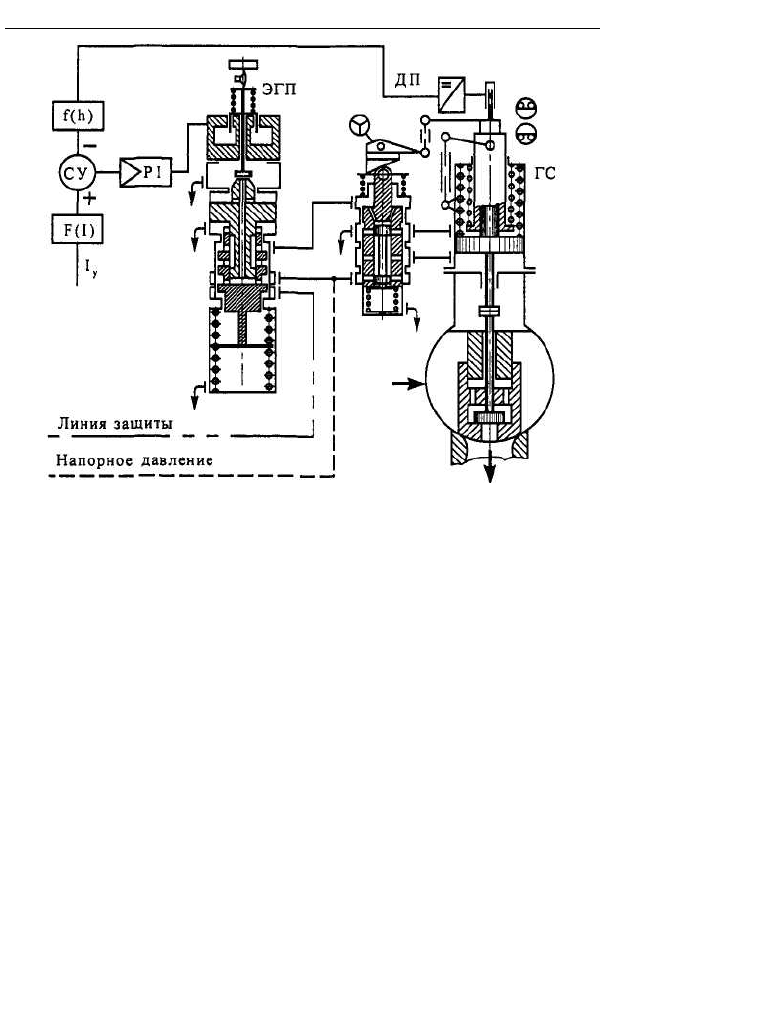
Электрогидравлический сервомотор ЭГС, исполь-
зуемый в этой схеме для привода регулирующего органа
(клапана), имеет гидромеханическую часть, состоящую из
гидравлического сервомотора ГС, электрогидравлического
преобразователя ЭГП, датчика положения сервомотора ДП и
электронного суммирующего усилителя СУ, выполненного на
цифровой технике (рис. 8.2). На вход усилителя СУ подаётся
командное задание от регуляторов верхнего уровня на
изменение положения сервомотора. СУ суммирует задание и
сигнал обратной связи от ДП и подаёт на ЭГП воздействия,
необходимые для отработки задания по PI-закону. Особен-
Глава 8 93
Рис. 8.2. Схема электрогидравлического сервомотора ЭГС
ностью рассматриваемого ЭГС является наличие в ГС
механической обратной связи на отсечной золотник. Эта
обратная связь может быть выполнена нелинейной, как в
гидравлических сервомоторах предыдущей схемы, но может
выполняться также линейной. В последнем случае требуемая
нелинейность подъёма сервомотора в зависимости от
командного задающего сигнала внешних регуляторов должна
выполняться в канале обратной связи от ДП в виде преобра-
зователя f(h), а ещё лучше в виде преобразователя F(I
y
)
непосредственно в канале задания воздействия от внешних
регуляторов на СУ (если это не противоречит применённым
алгоритмам), что позволяет обеспечить максимальное
быстродействие отработки задания. Это связано с тем, что на
быстродействие всего ЭГС (особенно на скорость интег-
рирования) влияет постоянная времени T
s
гидравлического
94 ___________________________________ Глава 8
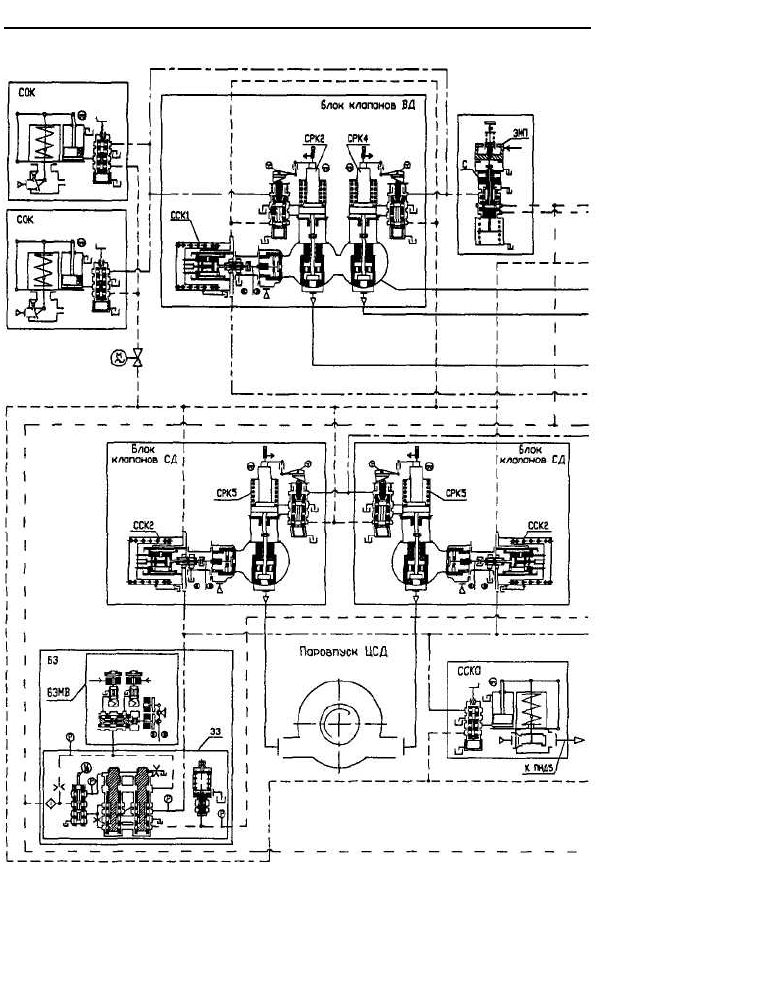
Рис. 8.3. Гидравлическая часть
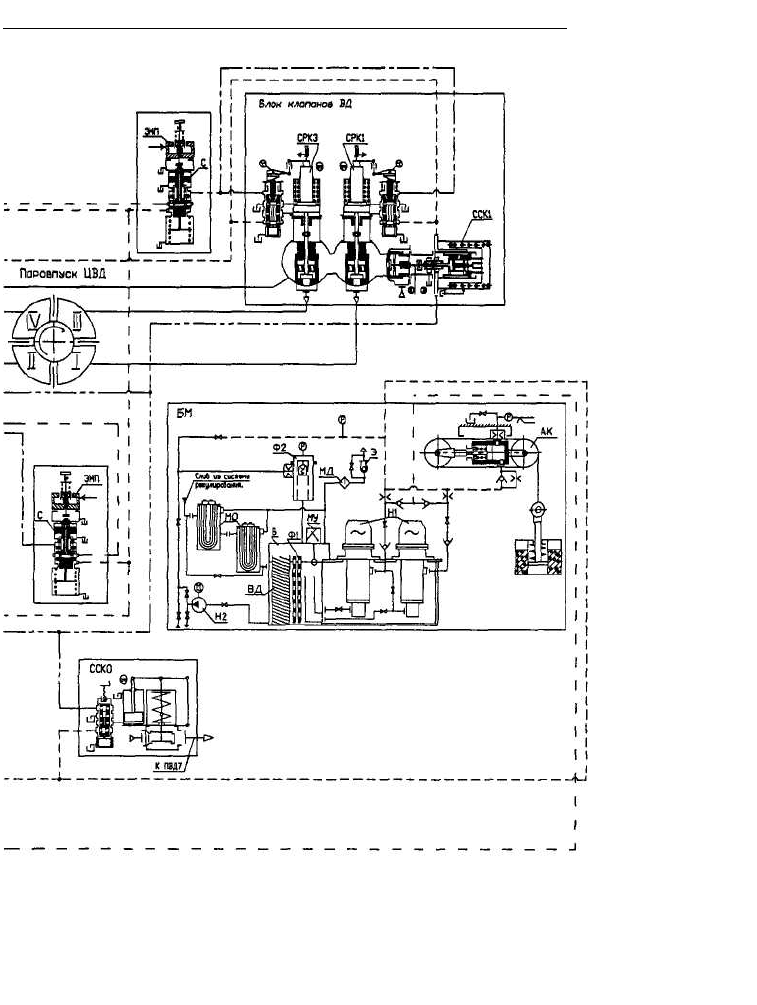
Глава 8 ____________________________________ 95
ЭГСР(схема"в")
96 Глава 8
Рис. 8.4. Схема электрогидравлического сервомотора ЭГС
сервомотора, которая может увеличиваться по двум причинам:
из-за уменьшения передаточного отношения между ходами
буксы обратной связи и поршня, которое уменьшается с
подъёмом сервомотора при наличии нелинейной обратной связи
(в 3...5 раз), а также при небольших отклонениях от заданного
значения положения сервомотора, когда отсечные кромки
золотника при своём перемещении не выходят из своих
положительных перекрытий по отношению к окнам в буксе, и
T
s
увеличивается тоже в несколько раз. Для обеспечения
качества переходного процесса соответственно увеличению T
s
необходимо уменьшать скорость интегрирования в PI-
регуляторе.
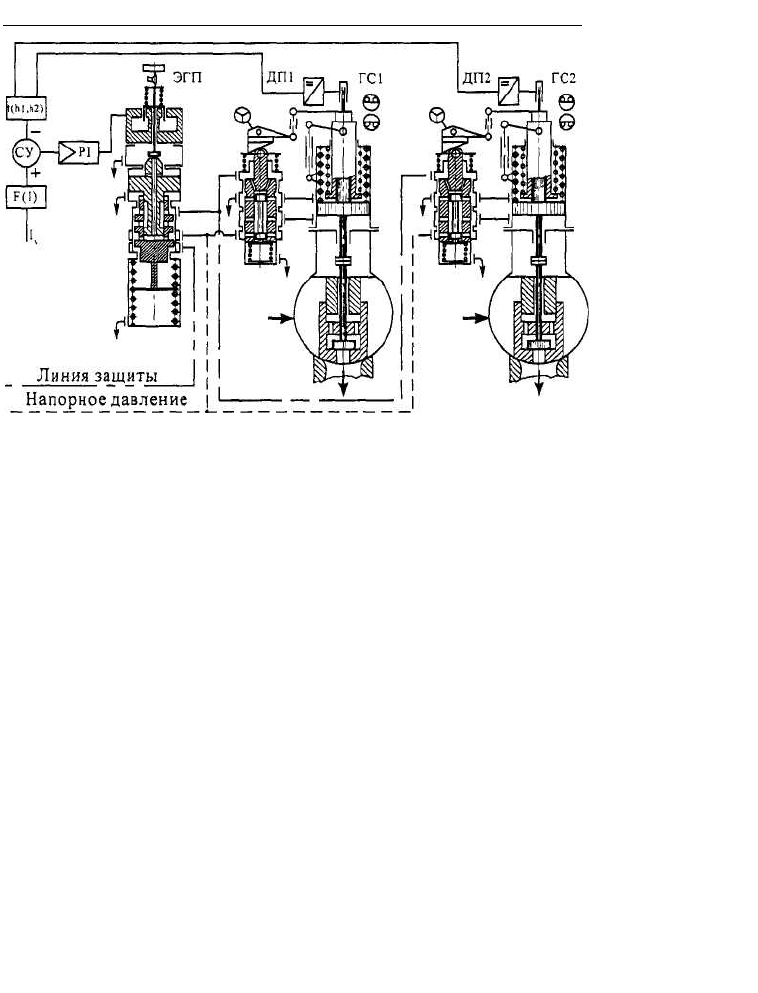
ЭГС, выполняемый по указанной схеме, может иметь
два ГС (рис. 8.4). Если эти два сервомотора открываются
параллельно, то можно вести управление, используя только ДП
одного сервомотора, другой используется только для
Глава 8 97
организации сигнала о чрезмерном рассогласовании сер-
вомоторов. Если сервомоторы открываются последовательно-
параллельно с некоторым сдвигом друг относительно друга, то
обратная связь формируется по сумме сигналов обоих ДП, при
этом учитывается "вес" каждого сервомотора, например, по
влиянию на мощность или расход. Применение такого ЭГС
позволяет вдвое сократить число ЭГП.
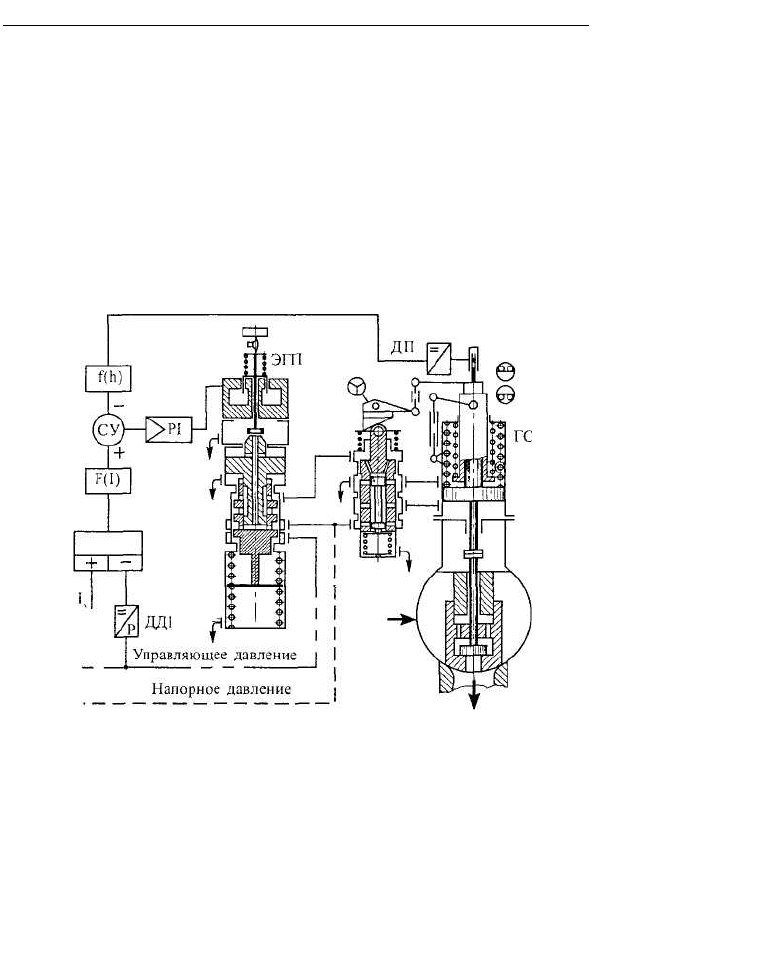
На рис. 8.5 показана схема ЭГС, который получает не
Рис. 8.5. ЭГС с переменным входным управляющим давлением
только командное задание на вход СУ (не только от верхнего
уровня), но также задание в виде переменного входного
управляющего давления ЭГП. Сигнал о величине этого давления
р
у2
должен подаваться также на вход СУ от датчика давления
ДД1, чтобы обеспечить точное выполнение зависимости
положения сервомотора от двух управляющих сигналов.
98 ___________________________________ Глава 8
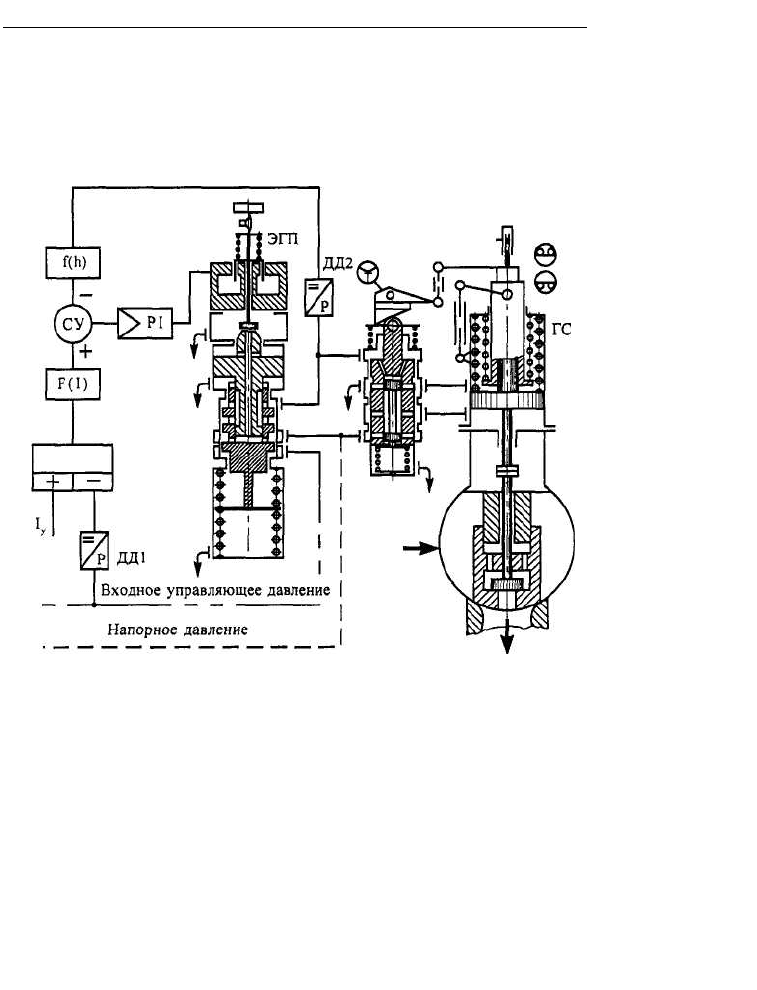
В некоторых случаях может найти применение схема
ЭГС, изображённая на рис. 8.6, в которой в качестве обратной
связи используется не датчик положения ДП, а датчик ДД2
величины выходного управляющего давления ЭГП.
Рис. 8.6. ЭГС с обратной связью по выходному
управляющему давлению
Схемы, представленные на рис. 8.5 и 8.6, могут найти
применение при модификации схемы регулирования "а"
(см. рис. 7.2) и применении в ней ЭГС того или иного вида.
Датчики регулируемых параметров. Наиболее
ответственным датчиком регулируемых параметров является
датчик частоты вращения, который определяет управление
турбины при развороте, при синхронизации и при работе турбины
в сети. От него требуется точность и надёжность. Датчик

Глава 8________________________________________ 99
может иметь три измерителя частоты, тогда управление
ведётся по датчику, показывающему среднее значение. Если
один измеритель выходит из строя (ведётся непрерывный
контроль цепей измерения), управление ведётся по датчику,
показывающему наивысшее значение. Аналогично поступают
при выполнении не одного, а двух или трёх датчиков частоты.
То же относится при применении стандартных датчиков
мощности, давления.
Алгоритмы регулирования и управления турбиной,
программируемые в аппаратуре электронной части системы
регулирования, во многом зависят от конкретной турбины, её
типа, желания заказчика.
Наиболее важным для создания этих алгоритмов является
выбор принципа построения электрогидравлической системы
регулирования турбины, при этом имеются следующие
возможности:
- значения электрических сигналов на входы ЭГП в
статических режимах равны нулю и отклоняются от нуля только
в переходных режимах; схема "а", собственно, так и строится,
и все необходимые для статического изменения режима
воздействия подаются через МУТ. При применении в этой схеме
ЭГС они должны выполняться по типу, показанному на рис. 8.5,
8.6. Наличие или отсутствие в этой схеме механического
датчика частоты не является принципиальным. Именно такой
получается схема "в", если управление турбиной под нагрузкой
осуществляется через МУТ. Все электрические регуляторы
таким образом действуют через моторные задатчики и должны
выполняться как PI-регуляторы параметров (или их комби-
нации) и учитывать характеристики этих задатчиков.
Достоинство таких схем - большая надёжность при потере
100 _______________________________________ Глава 8
питания. Большинство ЭГСР турбин ЛМЗ построено именно
таким образом;
- управление турбиной на всех режимах через ЭГП, а
МУТ используется только в режимах взвода защиты и, может
быть, также для для управления открытием стопорных кла-
панов. Для этого используется схема "в". В этом случае элект-
рические регуляторы параметров могут строится как PI-, так и
Р-регуляторы, что может оказаться проще при реализации и
лучше обеспечить устойчивость и быстродействие в отдельных
режимах, но предъявляют более высокие требования к качеству
аппаратуры.