Фрадков А.Л. Кибернетическая физика. Принципы и примеры
Подождите немного. Документ загружается.


на множестве X =
"
a, b
#
,гдеx
j
= x(jh/b − a).
Система (7.20) есть не что иное как управляемая версия клас-
сической модели Френкеля-Конторовой, (см., напр., [46]), предло-
женной в 1939 году, исследованию свойств которой посвящено много
работ.
Обычно при исследовании системы без управления выбирают в
(7.21) либо нулевые граничные условия x(a, t)=x(b, t) = 0. соответ-
ствующие в дискретной модели (7.20) соотношениям
x
0
(t) ≡ x
N+1
(t) ≡ 0, (7.22)
либо периодические условия x
r
r=a
= x
r
r=b
= 0, соответствующие
x
0
= x
1
, x
N
= x
N+1
.(7.23)
Задача управления энергией цепочки может быть решена на осно-
ве результатов гл. 3. Алгоритм управления энергией, полученный ме-
тодом скоростного градиента имеет вид
u(t)=γ
H(t) − H
∗
N
j=1
˙
x
j
sin x
j
,(7.24)
где γ > 0. Из теоремы 3.1 следует, что цель управления (7.15) в
системе (7.20), (7.24) при = 0 достигается, если энергетический
слой между уровнями H(0) и H
∗
не содержит равновесий системы,
удовлетворяющих условиям sin x
j
=0,j =1,...,N.
Отметим, что в частном случае N =2приграничныхусловиях
(7.23) система приобретает вид
J
¨
x
1
=
2k
h
2
x
2
− x
1
−
E
0
+ u(t)
sin x
1
− ρ
˙
x
1
,
J
¨
x
2
=
2k
h
2
x
1
− x
2
−
E
0
+ u(t)
sin x
2
− ρ
˙
x
2
.
(7.25)
В этом частном случае задача управления энергией близка к задаче
о синхронизации двух маятников, рассматривавшейся в п. 5.4.
Дискретный вариант алгоритма управления (7.19) имеет вид
u(t)=γ
H(t) − H
∗
x
2
− x
1
)
sin x
1
− sin x
2
,(7.26)
142
где H(t) определяется дискретным вариантом (7.14)
H =
J
2
˙
x
2
1
+
˙
x
2
2
+
k
2
x
1
− x
2
2
+ E
0
2 − cos x
1
− cos x
2
. (7.27)
Построенные алгоритмы управления можно применять для ис-
следования свойств нелинейных колебательных систем в различных
задачах. В частности, в ряде практических задач необходимо управ-
лять колебаниями осциллирующих частиц: например, ориентировать
частицы в заданном направлении, менять ориентацию частиц в жид-
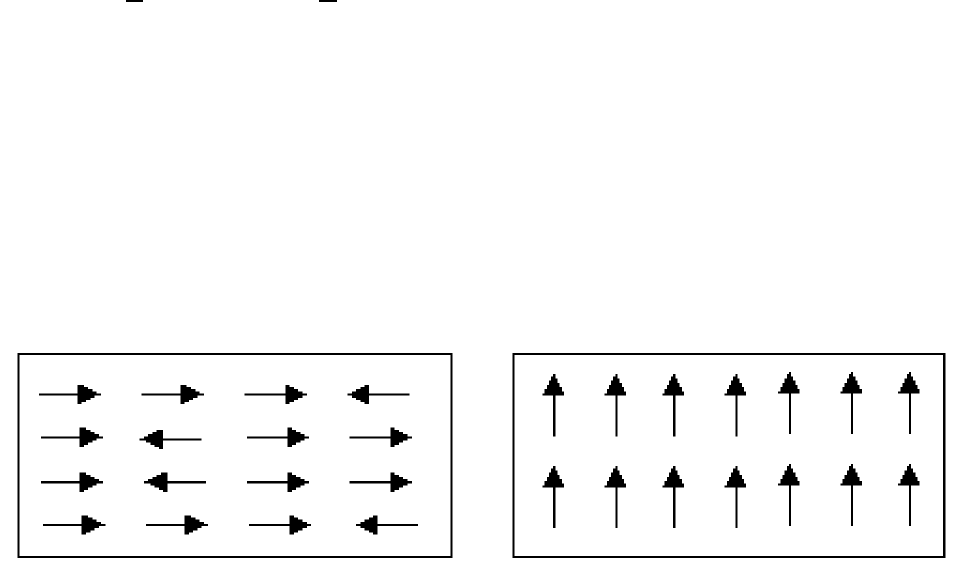
ких кристаллах с продольной на поперечную и т. п. с а)наб):
Рис. 7.1. Непрозрачная (а)ипрозрачная(б) структуры.
Если принять, что угол x(r, t) ориентации частиц подчиняется
уравнению (7.13), то добиться перехода из структуры с продольной
ориентацией а) в структуру с поперечной ориентацией б)можно,ме-
няя ориентацию (поляризацию) постоянного внешнего поля E.Одна-
ко, для этого изменение поля δE должно быть значительным и, по
крайней мере, превосходить начальное поле E
0
.
В то же время, используя алгоритм управления с обратной свя-
зью типа (7.19), можно заставить ориентацию кристаллов изменяться
наподобие колебаний маятников. При этом, если в качестве H
∗
вы-
брать величину, близкую к
¯
H = E
0
(b − a) – энергии состояния, со-
ответствующего конфигурации б)иеслистепеньдиссипации >0
мала, то алгоритм (7.19) при весьма малом γ,т.е.прималомощном
дополнительном управляющем воздействии, сможет заставить ча-
стицы значительную часть времени проводить вблизи конфигурации
б), т. е. сделать кристалл высокопрозрачным.
143
7.3 Управление волновым движением в цепочке маятников
Модель цепочки маятников. Рассмотрим, следуя [75], задачу уп-
равления возбуждением колебаний в цепочке из N последовательно
соединенных математических маятников. Такая модель встречается
при описании различных физических и механических систем (см.,
напр., [46, 160]). При отсутствии трения система связанных маятни-
ков описывается уравнениями
¨ϕ
1
(t)+ω
2
0
sin ϕ
1
(t)=k
ϕ
2
(t) − ϕ
1
(t)
+ u(t),
..................................
¨ϕ
i
(t)+ω
2
0
sin ϕ
i
(t)=k
ϕ
i+1
(t) − 2ϕ
i
(t)+ϕ
i+1
(t)
,
(i =2,3,...,N − 1),
..................................
¨ϕ
N
(t)+ω
2
0
sin ϕ
2
(t)=k
ϕ
N−1
(t) − ϕ
N
(t)
,
(7.28)
где ϕ
i
(t)(i = 1,2,...,N) – углы поворота маятников; u(t)–при-
ложенный к первому маятнику момент внешних сил, выраженный
в единицах углового ускорения (управляющее воздействие); ω, k –
параметры системы: ω
0
– собственная частота малых колебаний изо-
лированных маятников, k – параметр взаимодействия маятников (на-
пример, коэффициент упругости пружин).
Введем вектор состояния системы x(t) ∈ R
2N
как x(t)=
=col{ϕ
1
,˙ϕ
1
, ϕ
2
,˙ϕ
2
,..., ϕ
N
,˙ϕ
N
}. Полная энергия системы (7.28)
H(x)определяетсявыражением
H(x)=
N
i=1
H
i
(x), где
H
i
(x)=0.5˙ϕ
2
i
+ω
2
0
(1−cos ϕ
i
)+0.5k
ϕ
i+1
−ϕ
i
2
(i =1,2,...,N − 1),
H
N
(x)=0.5˙ϕ
2
1
+ω
2
0
(1−cos ϕ
N
).
(7.29)
При отсутствии управления рассматриваемая модель совпадает
с моделью цепочки Френкеля–Конторовой, в которой пренебрегли
трением. Главное отличие от задачи, рассмотренной в предыдущем
параграфе — характер вхождения управления. В отличие от задачи,
рассмотренной ранее, в данном параграфе изучается случай, когда
управление локализовано и воздействует только на один маятник. На
144
языке распределенных систем этот случай соответствует граничному
управлению.
Рассмотрим также систему циклически соединенных маятников,
которая описывается уравнениями, аналогичными (7.28), но включа-
ющими также упругую связь между первым и последним маятником:
¨ϕ
1
(t)+ω
2
0
sin ϕ
1
(t)=k
ϕ
2
(t)−2ϕ
1
(t)+ϕ
N
(t)
+u(t),
...............................
¨ϕ
i
(t)+ω
2
0
sin ϕ
i
(t)=k
ϕ
i+1
(t)−2ϕ
i
(t)+ϕ
i+1
(t)
(i =2,3,...,N − 1),
...............................
¨ϕ
N
(t)+ω
2
0
sin ϕ
N
(t)=k
ϕ
N−1
(t)−2ϕ
N
(t)
+ϕ
1
(t)).
(7.30)
Соответственно изменяется и выражение для полной энергии систе-
мы:
H(x)=
N
i=1
H
i
(x), где
H
i
(x)=0.5 ˙ϕ
2
i
+ω
2
0
(1−cos ϕ
i
)+0.5k
ϕ
i+1
−ϕ
i
2
(i =1,2,...,N − 1),
H
N
(x)=0.5 ˙ϕ
2
1
+ω
2
0
(1−cos ϕ
N
)+0.5k
ϕ
1
−ϕ
N
2
.
(7.31)
Уравнения (7.30) симметричны относительно собственных движений
маятников (первый маятник является «выделенным» только в си-
лу того, что к нему приложен момент управления). Эта симметрия
уравнений приводит к тому, что для данной системы упрощается до-
стижение цели управления, состоящей в синхронизации колебаний
маятников.
Постановка задачи и синтез алгоритма управления. Задачу
возбуждения «волны» колебаний с заданной амплитудой будем трак-
товать как достижение заданного уровня энергии системы с допол-
нительным требованием того, чтобы маятники имели противополож-
ные фазы колебаний. Синтез алгоритма управления выполним по
методу скоростного градиента.
Для применения метода введем частные целевые функции
Q
ϕ
(˙ϕ
1
,˙ϕ
2
)=0.5δ
2
ϕ
,
Q
H
(x)=0.5(H(x) − H
∗
)
2
,
(7.32)
145
где δ
ϕ
=˙ϕ
1
+˙ϕ
2
; H(x(t)) – полная энергия системы; H
∗
–еезадан-
ное значение.
Минимальное значение функции Q
ϕ
соответствует требованию
противофазности колебаний первого и второго маятников (во всяком
случае при малых начальных фазах ϕ
1
(0), ϕ
2
(0) тождество
Q
ϕ
(˙ϕ
1
,˙ϕ
2
) ≡ 0 выполняется только тогда, когда ˙ϕ
1
≡−˙ϕ
2
). Миними-
зация Q
H
означает достижение желаемой амплитуды колебаний.
Введем общую целевую функцию Q(x) как взвешенную сумму
Q
ϕ
и Q
H
,аименно
Q(x)=αQ
ϕ
(˙ϕ
1
,˙ϕ
2
)+(1− α)Q
H
(x), (7.33)
где α (0 ≤ α ≤ 1) – заданный весовой коэффициент.
Выполнение процедуры метода скоростного градиента с целевой
функцией Q(x) приводит к закону управления в конечной форме,
имеющему вид
u(t)=−γ
αδ
ϕ
(t)+
1 − α
δ
H
(t)˙ϕ
1
(t)
,
δ
ϕ
(t)=˙ϕ
1
(t)+˙ϕ
2
(t),
δ
H
(t)=H
t
− H
∗
.
(7.34)
Отметим, что вычисление управляющего воздействия требует из-
мерения угловых скоростей первого и второго маятников, а также
полнойэнергиивсейсистемымаятников.
Результаты моделирования процесса возбуждения и синхро-
низации колебаний. Приведем некоторые результаты моделирова-
ния процесса возбуждения колебаний по алгоритму (7.34).
Для определенности при экспериментальном исследовании рас-
смотрим цепочку из N = 50 маятников.
На графиках показаны результаты моделирования системы (7.28)
с алгоритмом управления (7.34) при γ = 0.8 и различных значениях
параметра α. Рис. 7.2 – 7.4 относятся к случаю α =0,вкотором
целью управления является обеспечение заданного уровня полной
энергии системы.
Как видно из графиков, данная цель управления достигается,
H
t
→ H
∗
(H
∗
= 4), но движение маятников носит нерегулярный (ха-
отический) характер и вторая цель управления не достигается (см.
146
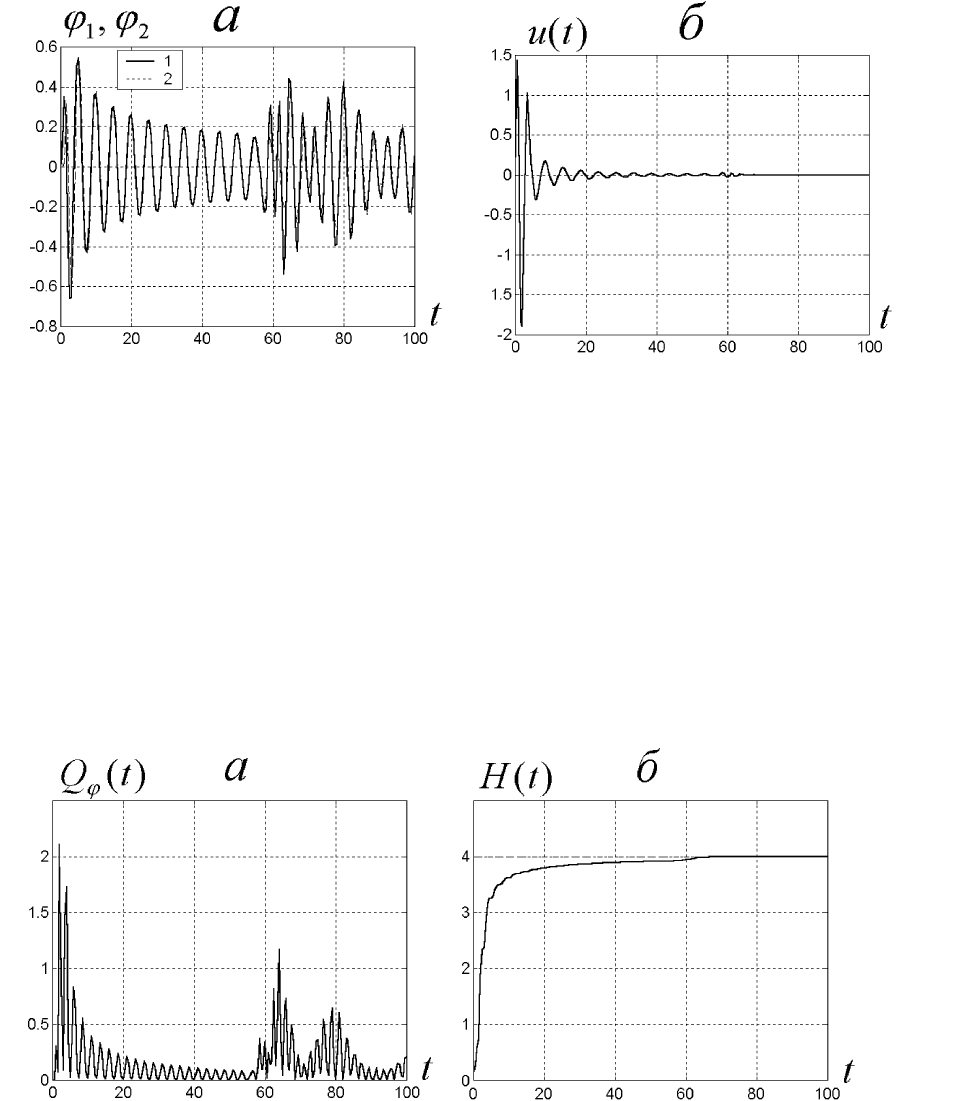
Рис. 7.2. Переходные процессы по ϕ
1
, ϕ
2
и сигнал управления. N =50, α=0.
Рис. 7.3. Целевые функции Q
ϕ
и H
t
. N =50, α =0.
147
рис. 7.3). Видно также, что по мере достижения требуемой энергии
сигнал управления затухает.
Причина нерегулярного поведения маятников проясняется из рис.
7.4. На данном рисунке видно, как «прямая» волна колебаний рас-
пространяется: при t ≈ 30 она достигает последнего маятника, после
чего навстречу распространяется «обратная» волна. Наложение волн
создает сложную картину колебаний. Процесс возбуждения колеба-
ний при α=1 показан на рис. 7.5, 7.6. Как видно их представленных
графиков, здесь также не удается обеспечить противофазного дви-
жения маятников. При промежуточных значениях 0 <α<1характер
процессов качественно не меняется по сравнению с рис. 7.2 – 7.4).
Причина неудовлетворительного поведения системы по отноше-
нию к цели Q
ϕ
по-видимому, в том, что противофазное движение ма-
ятников без управления не является инвариантным, т. е. при u(t) ≡ 0
это движение, возникнув, не будет сохраняться в дальнейшем. Для
подтверждения этой гипотезы рассмотрим рис. 7.7, на котором отра-
жены свободные колебания системы из 50 маятников, все начальные
условия в которых выбраны в противофазе (ϕ
i+1
(0) = −ϕ
i
(0), i =
= 1,2,...,N − 1). Возникающие на границах эффекты «отражения
волн» приводят через некоторое время к искажению картины ко-
лебаний, причем в первую очередь – для маятников, находящихся
вблизи от граничных (первого и последнего).
Причина появления отраженной волны колебаний видится в асим-
метрии уравнений (7.28): сила упругости, действующая на крайние
маятники, отличается от силы, действующей на внутренние маятни-
ки.
Обратимся теперь к системе из циклически соединенных маятни-
ков. Отсутствие краевых эффектов в этой системе демонстрируется
рис. 7.8, который получен в условиях, совпадающих с условиями по-
лучения рис. 7.7, но для системы (7.30).
На рис. 7.9, 7.10 показаны некоторые результаты применения ал-
горитма (7.34) к системе (7.30). Приняты значения γ =0.8,α =0.7.
Как видно из графиков, при циклическом соединении маятников по-
ставленная «комбинированная» цель управления достигается.
148
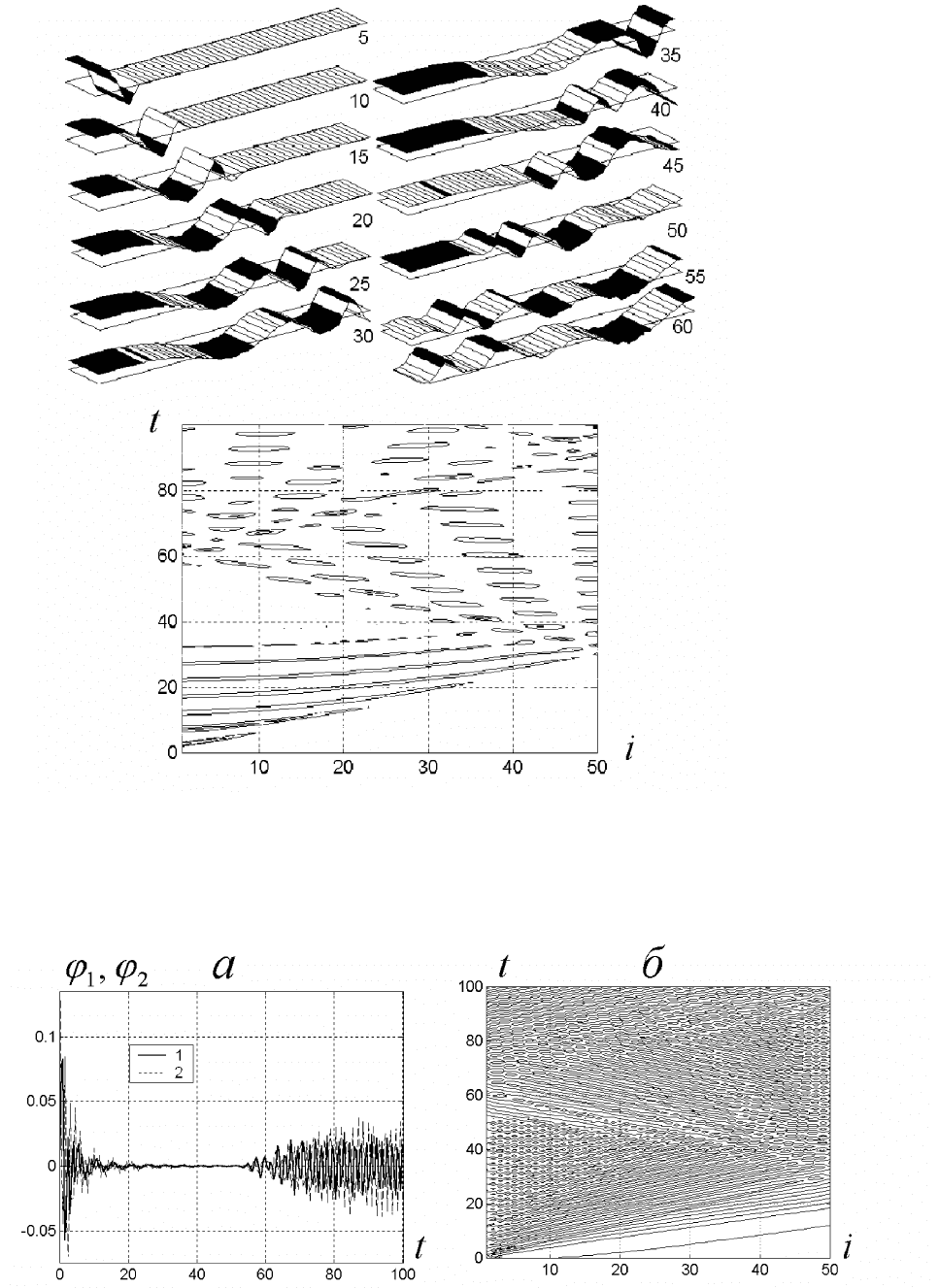
Рис. 7.4. Волна колебаний. N =50, α =0.
Рис. 7.5. Возбуждение колебаний. N =50, α=1.
149
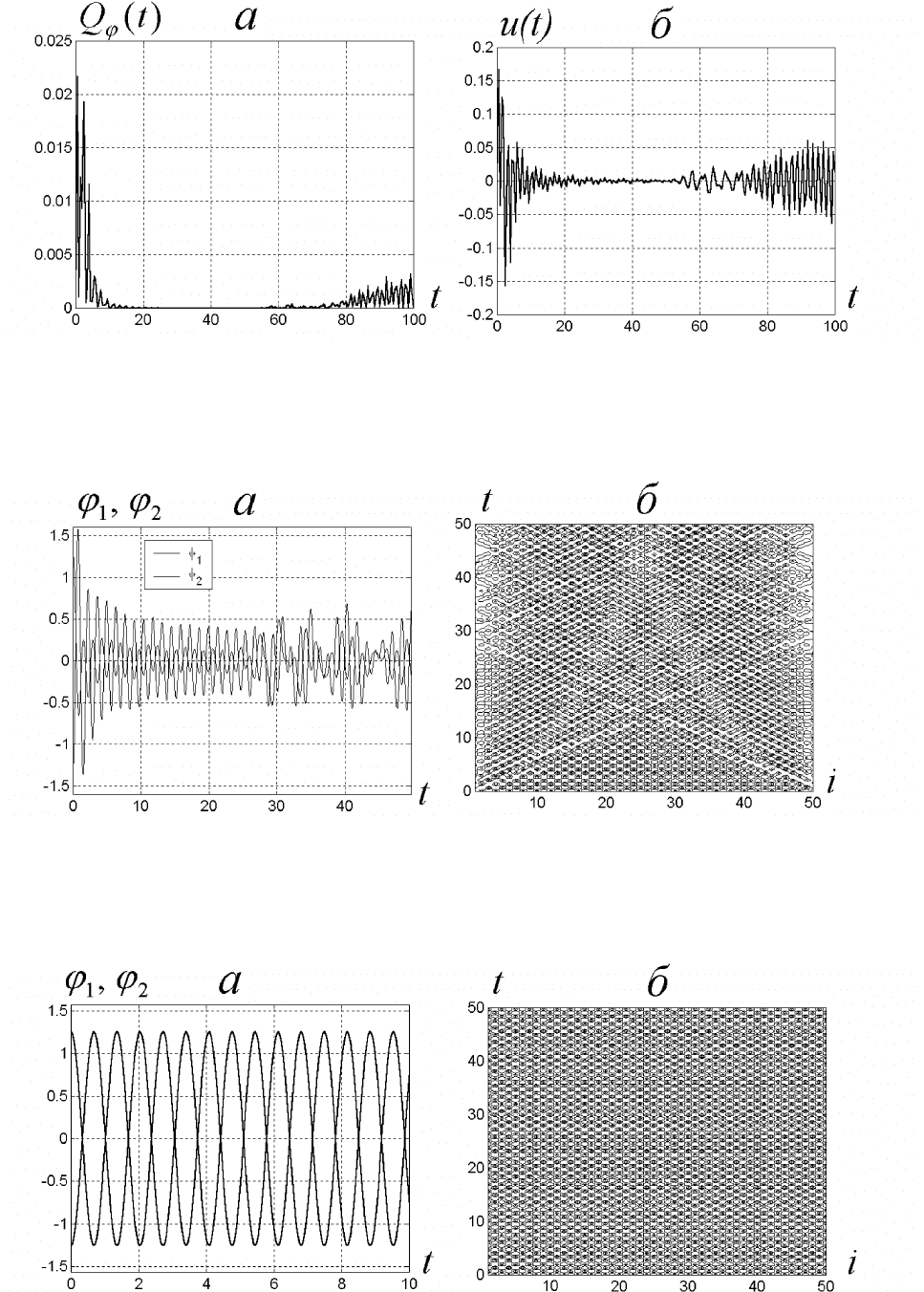
Рис. 7.6. Целевая функция Q
ϕ
и сигнал управления. N =50, α=1.
Рис. 7.7. Свободные колебания. N =50, u(t)≡0.
Рис. 7.8. Свободные колебания при циклическом соединении маятников. N =50.
150
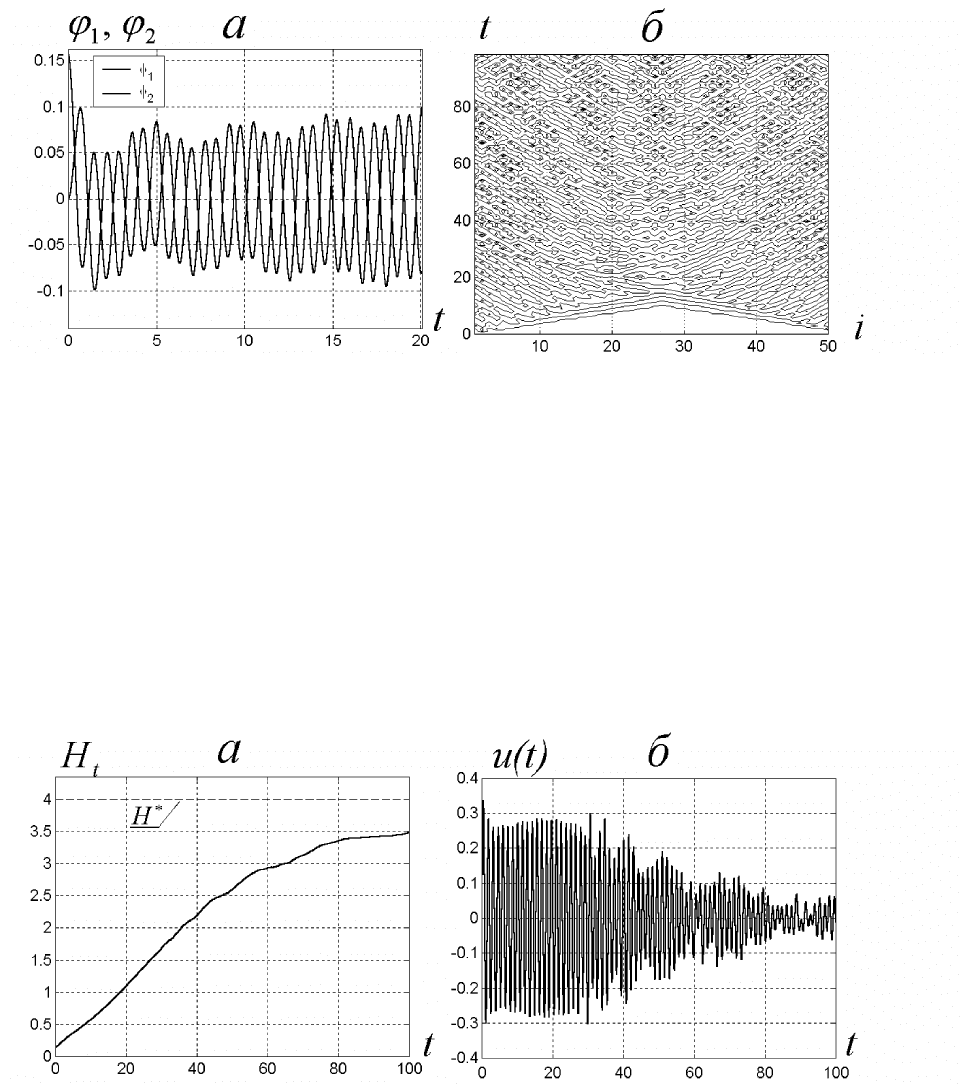
Рис. 7.9. Возбуждение колебаний при циклическом соединении маятников.
Рис. 7.10. Полная энергия и управление при циклическом
соединении маятников.
151