Фалк Г.Б., Иванько А.Ф. САПР средств и систем управления
Подождите немного. Документ загружается.

Министерство общего и профессионального образования
Российской Федерации
Московский Государственный Университет Печати
Московский Государственный Институт электроники и математики —
технический Университет
САПР средств и систем управления
Методические указания
к курсовому проекту
на тему: “Выбор элементов и устройств автоматики
для систем автоматического управления с использованием персональных ЭВМ и
удаленных баз данных.”
по направлению: “Автоматизация и управление (550200)”
Кафедра “Управление и информатика в технических сисмтемах ”
Кафедра “Автоматизация полиграфического производства”
Москва -2000.
2
Издательство МГУП “Мир книги”
Составители: к.т.н., проф. Г.Б. Фалк
к.т.н., доц. А.Ф. Иванько
В подготовке программного обеспечения для работы с удаленными базами данных
активное участие принимал студент МГИЭМ С.Потомский.
Курсовая работа ‘‘Выбор элементов и устройств автоматики для систем
автоматического управления с использованием персональных ЭВМ и удаленных баз
данных” предназначена для студентов, обучающихся по специальности 210100
“Управление и информатика в технических системах” и имеет целью выработать у
студентов практические навыки по дисциплинам: “Электромеханические устройства
автоматики”, “Электромеханические системы”, “САПР средств и систем управления”,
“Базы данных и информационно-поисковые системы”.
Курсовая работа может выполняться двумя способами:
1.С использованием информационно-поисковой системы, реализованной на автономной
персональной ЭВМ типа IBM PC/AT. Система представляет собой СУБД на языке
управления данными dBASE.
2.С использованием информационно-поисковой системы,расположенной на сервере
МГИЭМ,дистанционое обращение к которому осуществляется через сеть Internet.
3
ВВЕДЕНИЕ
В.1 ОБЩИЕ СВЕДЕНИЯ
В локальных системах автоматического управления (САУ), электроприводах
промышленных роботов и технологического оборудования гибких автоматизированных
производств (ГАП) широко применяются коллекторные и бесколлекторные двигатели
постоянного тока, синхронные и асинхронные переменного тока, шаговые двигатели. При
выборе необходимо учитывать следующие основные факторы:
1) функциональное назначение (исполнительный в системе автоматического
управления, силовой приводной, приводной в программно-временном устройстве и т.д.);
2) тип, возможности и ограничения источника питания двигателя и усилителя
мощности;
3) тип системы управления и требования к ее статическим и динамическим
характеристикам (цифровые системы управления, аналоговые, комбинированные и т.д.);
4) конструкцию, характер нагрузок и движений объекта управления, с которым
соединен двигатель;
5) условия работы (степень агрессивности среды, ее давление, температуру,
влажность, вибрации, инерционные нагрузки), время работы двигателя и требуемый
ресурс безотказной работы в заданных условиях;
6) ориентировочное значение предполагаемой выходной мощности и требуемый
к.п.д. , необходимую мощность управления;
7) условия эксплуатации (возможность контроля, возможность восстановления при
отказе, время приведения в готовность);
8) стоимость и эксплуатационные расходы.
В зависимости от интересов и возможностей студента курсовая работа может
выполняться двумя способами:
1.С использованием информационно-поисковой системы, реализованной на автономной
персональной ЭВМ типа IBM PC/AT. Система представляет собой СУБД на языке
управления данными dBASE.
2.С использованием информационно-поисковой системы,расположенной на сервере
МГИЭМ,дистанционое обращение к которому осуществляется через сеть Internet.
4
В.2 ОБЪЕКТ ПРОЕКТИРОВАНИЯ
В настоящей курсовой работе осуществляется один из этапов проектирования
локальных САУ и электроприводов ГАП, связанный с выбором электрических
двигателей. Необходимо выбрать электрические двигатели для электроприводов
кинематических звеньев промышленного робота, входящего в модуль ГАП; для привода
координатного стола, перемещающего обрабатываемые изделия; для силового
программно-временного привода силовой части оборудования модуля ГАП и для
приборной следящей системы, входящей в комплект измерительной аппаратуры модуля
ГАП.
Исходя из оценки факторов, приведенных в п. В.1, рекомендуется выбирать
следующие типы двигателей:
а) для силового программно-временного привода — трехфазный асинхронный
двигатель;
б) для приборной следящей системы — исполнительный двухфазный
асинхронный микродвигатель;
в) для привода координатного стола — синхронный шаговый двигатель;
г) для привода кинематического звена промышленного робота — исполнительный
двигатель постоянного тока.
В.3 ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ВЫБОР ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
В.3.1 Техническое задание на трехфазный асинхронный двигатель силового
привода
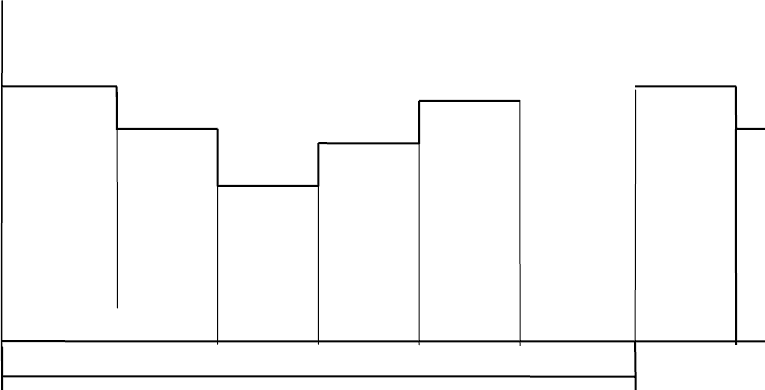
Режим работы двигателя: повторно-кратковременный.
Нагрузочная диаграмма двигателя в виде графика зависимости мощности нагрузки
Р от времени t (рис. В.1). Мощность Р задана с учетом потерь мощности в механическом
передаточном устройстве.
5
P
P
1
P
5
P
1
P
2
P
4
P
2
t
p1
t
p2
t
p3
t
p4
t
p5
t
0
t
p1
t
T
ц
рис. В.1
На этом рисунке:
t
p
— время работы
t
0
— время паузы
T
ц
— время цикла.
U
ном
— номинальное напряжение питания.
n
1
— синхронная частота вращения.
Список разрешенных к применению серий:
- трехфазные асинхронные двигатели с повышенным скольжением 4АС,
предназначенные для работы при различной относительной продолжительности
включения.
Схема управления.
Примечание: Пример Т3 для одного из вариантов приведен в таблице 1 приложений
P
3
6
В.3.2 Техническое задание на исполнительный асинхронный микродвигатель
приборной следящей системы
Способ управления — амплитудный или амплитудно-фазовый с конденсатором в
цепи возбуждения.
U
max
,, U
min
— верхняя и нижняя границы номинального напряжения управления.
f — номинальная частота.
ω
нг.max
— максимальная угловая скорость исполнительной оси (нагрузки)
ε
нг.max
— максимальное угловое ускорение исполнительной оси.
М
нг
— максимальный статический момент сопротивления (нагрузки) на
исполнительной оси.
i
ред.max
— максимальное значение передаточного отношения редуктора.
Список разрешенных к применению серий:
- двухфазные исполнительные асинхронные микродвигатели с полым немагнитным
ротором ДИД.
Схема управления.
Примечание: Пример Т3 для одного из вариантов приведен в таблице 2 приложений.
В.3.3 Техническое задание на шаговый двигатель координатного стола.
U
ном
— номинальное напряжение управления.
f
ш.дв.min
— нижняя граница приемистости при номинальной нагрузке.
M
нг
— максимальный статический момент сопротивления (нагрузки) на
исполнительной оси.
ω
нг.max
— максимальная угловая скорость исполнительной оси (нагрузки)
при номинальной частоте приемистости.
J
нг
— максимальный момент инерции на исполнительной оси (нагрузки).
Δθ
нг
— максимально допустимая дискретность отработки угла поворота
исполнительной оси.
Список разрешенных к применению серий:
- активные шаговые двигатели ШДА и ДШ.
Схема управления.
7
Примечание: Пример Т3 для одного из вариантов приведен в таблице 3 приложений.
В.3.4 Техническое задание на исполнительный двигатель постоянного тока
промышленного робота
Способ управления — якорный.
U
max
, U
min
— верхняя и нижняя границы номинального напряжения
управления.
Δω
*доп
— допустимое изменение угловой скорости при заданном изменении
момента
Δ
М
*зад
= 10% в номинальном режиме.
ω
нг.max
— максимальная угловая скорость исполнительной оси (нагрузки).
ε
нг.max
— максимальное угловое ускорение исполнительной оси.
М
нг
— максимальный статический момент сопротивления (нагрузки) на
исполнительной оси.
J
нг
— максимальный момент инерции на исполнительной оси (нагрузки).
i
ред.max
— максимальное значение передаточного отношения редуктора.
Список разрешенных к применению серий:
- двигатели с постоянными магнитами ДПМ.
Примечание: Пример Т3 одного из вариантов приведен в таблице 4 приложений.
1. ВЫБОР ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С
КОРОТКОЗАМКНУТЫМ РОТОРОМ ДЛЯ ПОВТОРНО- КРАТКОВРЕМЕННОГО
РЕЖИМА, ЗАДАННОГО НАГРУЗОЧНОЙ ДИАГРАММОЙ
1.1 Выбор двигателя для повторно-кратковременного режима работы, заданного
нагрузочной диаграммой Р(t) (рис. В.1), целесообразно проводить методом
эквивалентной мощности.
1.2 Эквивалентная мощность, соответствующая нагрузочной диаграмме,
определяется по формуле
Р
pt
t
экв
ipi
pi
.
=
⋅
∑
∑
2
. (1.1)
где i=1…5
Относительная продолжительность включения

8
ПВ
t
T
pi
ц
=⋅
∑
100% (1.2)
С учетом полученного значения ПВ необходимо пересчитать эквивалентную
мощность к ближайшему стандартному значению ПВ
ст
= 15, 25, 40 (номинальное), 60,
100%.
РР
ПВ
ПВ
экв ст экв
ст
.. .
.
=⋅ (1.3)
Предварительный выбор двигателя может быть осуществлен двумя способами:
а) с использованием автоматизированной системы, реализованной на ПЭВМ;
б) по каталогу двигателей (л.5, табл.2.4 и 2.6).
В обоих случаях выбирается двигатель с указанной в Т3 синхронной частотой вращения, у
которого при выбранном П
вст
максимально допустимая мощность
Р
2пвст
≥ Р
экв.ст
(1.4)
и разность между Р
2пвст
и Р
экв.ст
минимальная.
1.3 Выбранный двигатель проверить по условиям пуска и перегрузочной
способности. Условия проверки в первом приближении имеют вид
m
Р
Р
п
пвст
>
1
2.
m
Р
Р
к
пвст
>
max
.2
(1.5)
где
m
п
и m
к
— отношение пускового и максимального момента к номинальному по
каталогу (л.5, табл.3.4) или по списку технических данных двигателя, полученных от
ПЭВМ.
Р
1
и Р
max
— первое и максимальное в пределах цикла значение мощности
на нагрузочной диаграмме.
Если для выбранного двигателя условия (1.5) не выполняются, то выбирается
следующий по порядку более мощный двигатель. Для него осуществляется только
проверка по условиям пуска и перегрузочной способности.
9
1.4 Для выбранного двигателя по формуле Клосса рассчитать и построить
механическую характеристику.
1.4.1 Формула Клосса для расчета механической характеристики имеет вид
М
МаS
S
S
S
S
aS
эм
к
к
к
к
=
⋅⋅
+
⋅
++⋅⋅
21
2
max
()
(1.6)
где S — скольжение;
S
k
— критическое скольжение;
а
R
R
=
′
′′
1
2
— коэффициент;
R
′
1
, R
′′
2
— относительные значения активных сопротивлений статора и ротора на
Г-образной схеме замещения.
Примечание: Значения S, S
к
и S
ном
следует брать в относительных единицах.
1.4.2 Порядок расчета механической характеристики
ω
2
=f(М
эм
) по формуле (1.6)
следующий:
По каталогу (л.5, табл. 2.4 и 3.4) или по списку технических данных двигателя,
полученных от ПЭВМ, подставить в формулу (1.6) значения
Sк, R
′
1
, и R
′′
2
и выполнить замену
М
max
= m
к
⋅
М
ном
,
где М
ном
может быть определен исходя из значений номинальной мощности (л.5, табл.
2.4), номинального скольжения (табл. 3.4) и синхронной частоты вращения, или по
списку технических данных двигателя, полученных от ПЭВМ.
Подставить значение М
max
в (1.6) и рассчитать значения М
эм
при изменении
скольжения S в диапазоне от 0 до 1 ( 6-7 точек, включая S
ном
и S
к
).
Рассчитать значения угловой скорости ротора
ω
2
, соответствующие выбранным
значениям S.
1.4.3 Построить механическую характеристику выбранного асинхронного
двигателя
ω
2
= f( М
эм
).
1.5 Найти рабочую точку привода на механической характеристике двигателя при
характеристике нагрузки, определяемой уравнением

10
)1.01(
1
2
ω
ω
⋅−⋅=
стпст
ММ
где М
ст
— статический момент сопротивления (при нулевой частоте вращения
ротора принять М
ст.п
= 1/3М
п
);
ω
1
— синхронная угловая скорость двигателя;
М
п
— расчетное значение пускового момента двигателя.
2. ВЫБОР ИСПОЛНИТЕЛЬНОГО АСИНХРОННОГО
МИКРОДВИГАТЕЛЯ (ИАД) ДЛЯ ПРИБОРНОЙ СЛЕДЯЩЕЙ
СИСТЕМЫ МАЛОЙ МОЩНОСТИ
2.1 В приводах приборных следящих систем мощностью от десятка до долей
ватта момент инерции нагрузки обычно очень мал, невелик и момент инерции ротора.
Поэтому в общем моменте инерции возрастает доля, вносимая моментом инерции
редуктора.
При этих условиях задача расчета оптимального передаточного отношения
редуктора не имеет смысла. Передаточное отношение определяется соотношением
номинальной частоты вращения двигателя и заданной частоты вращения выходного вала.
Проверку на нагрев таких двигателей не производят, т.к. их обмотка возбуждения
рассчитана на длительный режим включения при неподвижном роторе двигателя, а ток по
обмотке управления протекает только при вращении ротора.
2.2 Предварительные оценки и расчеты выполняются исходя из параметров
статического
(без ускорения) режима работы привода.
2.2.1 Предварительная оценка диапазона номинальной мощности Р
ном
для выбора
двигателя может быть сделана по максимальному значению статического момента
нагрузки М
нг
(Н⋅м) и максимальной угловой скорости исполнительной оси
ω
нг.max
(рад/с)
Р
ном
= (1,2
÷
2,5)
⋅
М
нг
⋅ω
нг.max
(Вт) (2.1)
Выбор двигателя завышенной (по отношению к 2.1) мощности приведет к
увеличению габаритов и массы привода, повышенному расходу электроэнергии.
Завышение мощности может отрицательно сказаться на динамических свойствах системы,
т.к. с увеличением мощности двигателя растут размеры и, соответственно, момент
инерции ротора. Двигатели заниженной (по отношению к 2.1) мощности практически