Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.


SECTION 8.8 FURTHER READING 239
= −
k
i=1
(R
∗
u
i
R
∗
) ∧ v
i
= 0.
This kind of pulling out a differentiation operator is a good trick to remember. The result-
ing equation expresses the fact that R
∗
f[x]
R
∗
is a symmetric function of x. The function
f itself is therefore the
R
∗
-rotated version of a symmet rical function.
We could proceed symbolically with geometric algebra to find the sy mmetric par t of R
∗
[f]
(by adding the adjoint
f[R
∗
] and dividing by two), and its inverse (using (4.16)), and tak-
ing that out of the function; what remains is then the rotation by the desired rotor. How-
ever, [36] at this point switches over to using numerical linear algebra. In linear algebra,
any linear function f has a polar decomposition in a symmetric function followed by an
orthogonal transformation, and this can be computed using the singular value decom-
position (SVD) of its mat rix [[f]] as
f
≡ [[ U]] [[ S]] [[ V]]
T
= ([[U]] [[ V]]
T
)([[V]] [[ S]] [[ V]]
T
).
Using this result, the matrix of the optimal rotation
R
∗
is [[ V]] [[ U]]
T
,where[[ U]] and [[ V]]
are derived from the SVD of [[f]] ≡
k
i=1
[[ u
i
]] [[ v
i
]]
T
. This rotation matrix is easily con-
verted back into the optimal rotor R
∗
, see Section 7.10.4.
This simple matrix computation algorithm is indeed the standard solution to the Pro-
crustes problem. In the usual manner of its derivation, formulated in terms of involved
matrix manipulations, one may have some doubts as to whether the SVD (with its inher-
ent use of the Frobenius metric on matrices) is indeed the optimal solution to origi-
nal optimization problem (which involved the Euclidean distance). In the formulation
above, the intermediate result (8.17) shows that this is indeed correct, and that the
SVD is merely used to compute the decomposition rather than to perform the actual
optimization.
From a purist point of view, it is of course a pity that the last part of the solution had
to revert temporarily to a matrix formulation to compute a rotor. We expect that appro-
priate numerical techniques will be developed soon completely within the framework of
geometric algebra.
8.8 FURTHER READING
The main reference for further reading on geometric calculus is the classic book by
Hestenes [33], which introduced much of it. It contains a wealth of material, including
an indication of how geometric calculus could be used to rephrase differential geometry.
His web site contains more material, including some new introductions such as [26].
The approach in Doran and Lasenby’s book [15] is tailored towards physicists, and it has
good and practical introductions to the techniques of geometric calculus. Read them for
directed integration theory. They are practitioners who use it daily, and they give just the
right amount of math to get applicable results.

240 GEOMETRIC DIFFERENTIATION CHAPTER 8
8.9 EXERCISES
8.9.1 DRILLS
1. Compute the radius of the tangent circle for the circular motion
r(τ) = exp(−Iτ) e
1
in the plane I = e
1
∧ e
2
, at the general location r(τ).
2. Compute the following derivatives:
1. (a ∗
∂
x
) x
3
2. ∂
x
x
3
3. (a ∗ ∂
x
)(xb/x)
4.
∂
x
(xb/x)
5.
`
x
`
∂
x
6.
`
x ∧
`
∂
x
7.
`
x ·
`
∂
x
.
3. Show that the coordinate vectors are related to differentiation through e
k
=
∂
∂x
k
x.
4. Show that the reciprocal frame vectors are the gradients of coordinate functions:
e
k
= ∂
x
x
k
.
8.9.2 STRUCTURAL EXERCISES
1. Prove the Jacobi identity (8.2) and relate it to nonassociativity of the bivector
algebra.
2. Derive the Taylor expansion of a rotor transformation:
e
−B/2
Xe
B/2
= X + X x B +
1
2
((X x B) x B) + ···.
Do this by assuming that the first-order term is correct for small bivectors, it is eas-
ily derived by setting exp(−B/2) ≈ 1 − B/2. Now write a versor involving a finite
B as versors involving B/2, B/4, B/8, and so on and build up the total form through
repeated application of the smallest bivector forms. That should give the full
expansion.
3. The Baker-Campbell-Hausdorff formula writes the product of two exponentials as
a third, and gives a series expansion of its value:
e
C
= e
A
e
B
with
C = A + B + A
x B +
1
3
(A x (A x B) + B x (B x A)) + ···.
Show that these first terms of the ser ies are correct. This formula again shows the
importance of the commutator A
x B in quantify ing the difference with fully com-
muting variables. We should warn you that the general terms of the series are more
complicated than the first few suggest.
SECTION 8.9 EXERCISES 241
x
+
a
x
a
x/
⎜⎜x⎜⎜
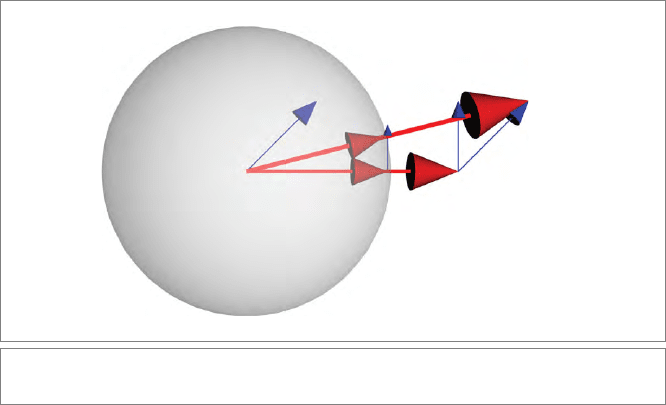
Figure 8.3: The directional derivative of the spherical projection.
4. Directional differentiation of spherical projection.
Suppose that we project a vector x on the unit sphere by the function x → P[x] =
x/||x||. Compute its directional derivative in the a direction, as a standard differ-
ential quotient using Taylor series expansion. Use geometric algebra to write the
result compactly, and give its geometric meaning. (Hint: See Figure 8.3.)
5. Justify the following form of Taylor’s expansion formula of a function F around the
location x:
F(x + a) = e
a∗∂
x
F(x),
where you can interpret the exponent in a natural manner as a symbolic expansion
instruction.
6. For variable I(τ), the resulting
∂
τ
X(τ) of (8.8) can still be written as a commutator
X
x B with a bivector B. Derive the explicit expression for B:
B = I
∂
τ
[] +
∂
τ
[I](e
I
− 1)/I.
Hint: One way is to use the result B = −2
∂
τ
[R]
R from [15].
9
MODELING GEOMETRIES
So far we have been treating only homogeneous subspaces of the vector spaces (i.e.,
subspaces containing the origin). We have spanned them, projected them, and rotated
them, but we have not moved them off the origin to make more interesting geometri-
cal structures such as lines floating in space. You might fear that we need to extend our
framework considerably to incorporate such new geometr ical elements and their algebra,
introducing offset blades as algebraic primitives.
However, significant extensions turn out to be unnecessary, by using a simple trick that
is a lot more generic than it appears at first: these offset elements of geometry in a vector
space
R
n
can also be represented by blades, but in a representational space R
n+1
with
one extra dimension. The geometric algebra of that space then gives us most of what
we need to compute in
R
n
. Since the blades of that higher-dimensional space R
n+1
are
its homogeneous subspaces, this is called the homogeneous model of geometry (though
“homogenized” might be more accurate, for we have made things homogeneous in
R
n+1
that were not in R
n
).
In this view, more complicated geometrical objects do not require new operations or tech-
niques in geometric algebra, merely the standard computations in a higher-dimensional
space, followed by an interpretation step. The geometric algebra approach considerably
extends the classical techniques of homogeneous coordinates, so it pays to redevelop this
fairly well-known material. The homogeneous model permits us to represent offset
subspaces as blades, and transformations on them as linear transformations and their
outermorphisms. As we develop the details in Chapter 11, we find that the geometric
245
246 MODELING GEOMETRIES CHAPTER 9
algebra approach exposes some weaknesses in the homogeneous model. It turns out that
we cannot really define a useful inner product in the representation space
R
n+1
that
represents the metric aspects of the original space
R
n
well; we can only revert to the
inner product of
R
n
. As a consequence, we also have no compelling geometric product,
and our geometric algebra of
R
n+1
is impoverished, being reduced to outer product and
nonmetric uses of duality (such as
meet and join). This restr icts the natural use of the
homogeneous model to applications in which the metric is less important than the aspects
of spanning and intersection. The standard example is the projective geometry involved
in imaging by multiple cameras, and we treat that application in detail in Chapter 12. Still,
the quantitative capabilities of geometric algebra do help in assigning some useful relative
metrical meaning to ratios of computed elements.
The better model to treat the metric aspects of Euclidean geomet ry is a representation
that can make full use of the power of geometric algebra. That is the conformal model
of Chapter 13, which requires two extra dimensions. It provides an isometric model of
Euclidean geometry. In this representation, all Euclidean transformations become repre-
sentable as versors, and are therefore manifestly structure-preserving. This gives a satis-
fyingly transparent structure for dealing with objects and operators, far transcending the
classical homogeneous coordinate techniques. We initially show how this indeed extends
the homogeneous model with metric capabilities, such as the smooth interpolation of
rigid body motions in Chapter 13. Then in Chapter 14 we find that there are other
elements of Euclidean geometry naturally represented as blades in this model: spheres,
circles, point pairs, and tangents. These begin to suggest applications and algorithms that
transcend the usual methods. To develop the tools for those, we look at the new construc-
tions in detail in Chapter 15. In the last chapter on the conformal model, we find the
reason behind its name: all conformal (angle-preserving) transformations are versors,
and this now also gives us the possibility to smoothly interpolate rigid body motions with
scaling. In all of these chapters, the use of the interactive software is important to convey
how natural and intuitive these new tools can become.
But first, we should make more explicit how the regular n-dimensional geometric alge-
bra, used as a vector space model, gives us tools to treat the directional aspects of an
n-dimensional space. This capability of computing with an algebra of directions will
transfer to the more powerful models as a directional submodel at every location in space.
10
THE VECTOR SPACE
MODEL: THE ALGEBRA
OF DIRECTIONS
When we developed geometric algebra in the first part of this book, we illustrated the
principles with pictures in which vectors are represented as arrows at the origin, bivectors
as area elements at the origin, and so on. This is the purest way to show the geometric
properties corresponding to the algebra.
The examples showed that you can already use this algebra of the mathematical vector
space
R
n
to model useful aspects of Euclidean geometry, for it is the algebra of directions
of n-dimensional Euclidean space. We explore some more properties of this model in this
chapter, with special emphasis on computations with directions in 2-D and 3-D. Most
topics are illustrated with programming exercises at the end of the chapter.
First we show how the vector space model can be used to derive fundamental results in the
mathematics of angular relationships. We give the basic laws of trigonometry in the plane
and in space, and show how rotors can be used to label and classify the crystallographic
point groups.
Then we compute with 3-D rotations in their rotor representation, establishing some
straightforward techniques to construct a rotor from a given geometrical situation, either
deterministically or in an optimal estimation procedure. The logarithm of a 3-D rotor
enables us to interpolate rotations.
247
248 THE VECTOR SPACE MODEL: THE ALGEBRA OF DIRECTIONS CHAPTER 10
Finally, we give an application to external camera calibration, to show how the vector
space model can mix directional and locational aspects.
10.1 THE NATURAL MODEL FOR DIRECTIONS
There are n independent 1-D directions in an n-dimensional physical space, and they can
conveniently be drawn as vectors at the origin. Mathematically, they form a vector space
R
n
, for they can be added and scaled with real numbers to produce other legitimate 1-D
directions. The metric of the directions in the physical space (typically Euclidean) can be
used to induce a metric in this mathematical representation. That gives a model of the
directions in physical space in terms of the geometric algebra of a metric vector space
R
n
.
The vector space model thus constructed is indeed a good computational representation of
spatial directions at the origin. We have used it in all our illustrations of the geometrical
properties of geometric algebra in Part I. This already gave a list of powerful abilities,
directly applicable to computations with directions. We list the main results.
•
The k-dimensional directions in n-dimensional space can be composed as outer
products of k 1-D directions (represented as vectors). These k-blades can be decom-
posedonan
n
k
-dimensional basis. Only for grades 0, 1, (n−1), and n can k-blades
be constructed by arbitrary addition of basis elements.
•
Directions have an attitude, a weight, and an orientation.
•
Relative angles between k-dimensional directions can be computed using the con-
traction, even when they are of different grades. A k-direction can be represented
by its dual, the direction of its orthogonal complement.
•
Intersection and union of k-directions is defined by meet and join,whicharea
specific combination of outer product and duality. The orthogonal projection of
k-directions is also well defined by the contraction.
•
Directions can be used to reflect other directions using sandwiching products
(where some care is required to process their orientation properly).
•
Directions can be rotated using rotors and multiplied by the geometric product to
produce such rotors.
Beyond these structural properties, true for the abstract directions of a general vector
space
R
n
, we need specific techniques to use the blades of the vector space model to solve
particular geometrical problems, notably in the Euclidean spaces
R
2
and R
3
.
10.2 ANGULAR RELATIONSHIPS
The vector space model is the natural model to treat angular relationships at a single
location. To show this, we derive the elementary laws of sines and cosines in a
SECTION 10.2 ANGULAR RELATIONSHIPS 249
planar triangle; some similar relationships in a spherical triangle; and the point groups
of crystallography. The results are not new, but intended as examples of how you can
now think about such problems in a purely directional manner using geometric algebra.
Especially the ability to divide and multiply vectors will simplify both the computations
and the definition of the oriented angular parameters in the configurations.
10.2.1 THE GEOMETRY OF PLANAR TRIANGLES
The combination of rotors in the same plane is sufficient to derive the various relation-
ships between sides and angles in triangles. We repeat the derivation of these laws as given
in [29], pp. 68–70, since this application shows the simplicity and power of geometric
algebra nicely. Quantities that are required to characterize the properties are completely
definable in terms of the original elements of the problem.
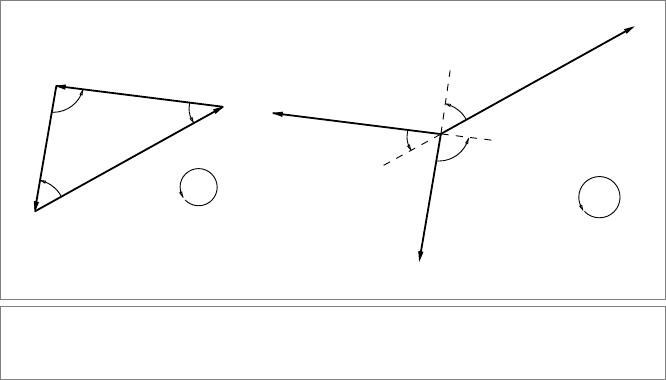
In Figure 10.1(a) we have indicated a triangle in the 2-D Euclidean I-plane, composed of
three vectors a, b, c that have the relationship
a + b + c = 0.
(10.1)
These vectors indicate weighted directions, and their weights can be drawn as their
lengths. Although they have been drawn offset from the origin, there are no actual posi-
tional aspects to this triangle and its relationships. This is shown by redrawing all vectors
involved as emanating from the origin, in a purist version of the triangle, as Figure 10.1(b).
The relevant geometric algebra of both figures is the same.
γ
α
β
c
b
a
I
γ
α
β
c
a
I
b
(a) (b)
Figure 10.1: A triangle a + b + c = 0 in a directed plane I, and an equivalent configuration for
treatment with the vector space model.
250 THE VECTOR SPACE MODEL: THE ALGEBRA OF DIRECTIONS CHAPTER 10
Solving this equation a + b + c = 0 for c, and squaring, we get
c
2
= (a + b)
2
= a
2
+ b
2
+ ab + ba = a
2
+ b
2
+ 2a · b. (10.2)
We may introduce the angle α between c and −b (in that order), and similarly β and γ
(see Figure 10.1), and we can introduce the lengths of the sides a, b, and c.The
picture defines what is meant, but in geometric algebra we would rather define those
elements unambiguously as properties of the geometric ratios of the original vectors.
Section 6.1.6 gives the principle. Carefully observing the required angles and signs leads
to the exact definitions:
−b/a ≡b/ae
Iγ
, −c/b ≡c/be
Iα
, −a/c ≡a/ce
Iβ
.
(10.3)
Daring to make such definitions is a skill that you should master, for it is the transition
from the classical methods of thinking about angles (with the associated headaches on
the choice of signs) to the automated computations of geometric algebra. Make sure
you understand the precise relationship between these definitions and the figure they
represent!
When combined with the basic property (10.1), the angle definitions (10.3) fully define
all relationships in the triangle. It just takes geometrically inspired algebraic manipula-
tion to bring them out. For instance, we can multiply these equations. Remembering that
exponentials of commuting arguments are additive, we obtain by (10.3)
e
I(α+β+γ)
= e
Iα
e
Iγ
e
Iβ
= (−c/b)(−b/a)(−a/c) = −1 = e
Iπ
(10.4)
This implies that
α + β + γ = π mod (2π), (10.5)
which is a rather familiar result.
To obtain other classics, we split the geometric product in a contraction and an outer
product, thereby separating the equations into their scalar and bivector parts. This auto-
matically introduces the trigonometric functions as components of the rotors.
We multiply both sides of (10.3) by a
2
, and so on, and obtain six equations:
−b · a = ba cos γ, − b ∧ a = baI sin γ,
−c · b = cb cos α, − c ∧ b = cbI sin α,
−a · c = ac cos β, − a ∧ c = acI sin β.
Then the earlier results can be put into the classical form. Equation (10.2) is the law of
cosines:
c
2
= a
2
+ b
2
− 2ab cos γ.
(10.6)
SECTION 10.2 ANGULAR RELATIONSHIPS 251
Taking the outer product of (10.1) with a, b, and c, we obtain
a ∧ b = b ∧ c = c ∧ a, (10.7)
which leads to the law of sines in the I-plane:
sin α
a
=
sin β
b
=
sin γ
c
. (10.8)
We have divided out the plane I in which this holds to achieve this classical form. But in
fact, (10.7) is more specific and is valid in any plane I in n-dimensional space.
In the classical formulation, the area of the triangle is
1
2
absin γ (or a similar expres-
sion). We see that in the directed plane I, we can define the oriented area Δ of the triangle
naturally by the equivalent ratios
Δ=
a ∧ b
2 I
=
b ∧ c
2 I
=
c ∧ a
2 I
. (10.9)
This is a proper geometric quantity that relates the area to the orientation of the plane it
is measured in.
10.2.2 ANGULAR RELATIONSHIPS IN 3-D
In a 3-D Euclidean space, geometrical directions can be indicated by vectors or bivectors
(which are always 2-blades). The scalars and trivectors have trivial directional aspects and
are mostly used for their orientations and magnitudes.
Relative angles between the directional elements are fully represented by their geometric
ratios. Let us consider only unit elements, so that we can fully focus on the angles. Between
two unit directional elements, there are three possibilities:
•
Two Vec t o r s. The geometric ratio of two unit vectors u and v isarotorR = v/u.It
contains in its components both the rotation plane I and the relative angle of the
two vectors. These can be retrieved from the rotor as the bivector angle I, using
the logarithm function defined below in Section 10.3.3. Note that only the product
of plane and angle is a well-defined geometric quantity, since each separately has an
ambiguity of magnitude and orientation. In that sense, scalar angles are ungeomet-
rical and should be avoided in computations, since they necessitate the nongeomet-
rical choice of standard orientation for the I-plane. Since you probably only need
the angles to use them in a rotation operator anyway, you may as well keep their
bivector with their magnitude as a single bivector angle.
•
Two Bivectors (2-Blades). The geometric ratio of two unit 2-blades U and V also
defines a rotor R = V/U. This is most easily seen by introducing their normal
vectors u ≡ U
∗
= U/I
3
and v ≡ V
∗
= V/I
3
. Substituting gives R = V/U = v/u.
Therefore, this reduces to the previous case. The bivector angle between two