Дибров М.В. Маршрутизаторы
Подождите немного. Документ загружается.


Такое предположение основывается на классе IP адреса. После получения па-
кета с обновлением маршрутизатор чтобы определить сетевую составляю-
щую IP адреса делает следующие:
– Если обновление маршрутизации содержит тот же адрес сети, что на-
строен на интерфейсе, на который пришло обновление. Маршрутизатор до-
бавляет к маршруту маску подсети, которая назначена на интерфейсе.
– Если обновление содержит адрес сети отличный от настроенного на
интерфейсе. Маршрутизатор назначает адресу сети маску стандартную для
класса, к которому принадлежит адрес сети.
Все подсети сети класса A, B или C при использовании классового про-
токола маршрутизации должны иметь туже маску подсети. Когда производит-
ся деление на подсети адресного пространства для классовых протоколов
маршрутизации, используются маски подсетей фиксированной длины FLSM.
Если это не соблюдать, то маршрутизатор может неправильно назначать мас-
ку подсети для полученных маршрутов.
3.3.1 Суммирование маршрутов при классовой маршрутизации
Классовые протоколы маршрутизации могут производить только авто-
матическое суммирование маршрутов на границах сети. Когда маршрутизатор
посылает обновление маршрутной информации за границу сети, производиться
автоматическое суммирование маршрута до маршрута на полную классовую
сеть.
В виду того, что в обновлениях маршрутной информации не содержится
маска подсети, маршрутизатору при получении каждого пакета необходимо
самостоятельно дополнять полученную информацию необходимыми сведения-
ми. По алгоритму работы классовых протоколов маршрутизации автоматиче-
ское суммирование маршрутов происходит при получении маршрутизатором
информации о сети, к которой у него не подключен ни один интерфейс, когда
маршрутизатор вынужден назначать стандартную маску для класса, к которому
принадлежит полученная сеть.
R1 R2 R3
172.16.2.0/24 172 .16.1.0/2410.1.0.0/16 10.2.0.0/16
10.1.0.0
10.2.0.0
172.16.0.0
10.1.0.0
10.2.0.0
172.16.1.0
172.16.2.0
10.0.0.0
172 .16.1.0
172 .16.2.0
Рисунок 3.7 – Суммирование маршрутов в классовых протоколах
На рисунке 3.7 маршрутизатор R1 посылает маршрут на подсеть 10.1.0.0
маршрутизатору R2, так как он имеет подключение к нему с адресом принадле-
51
жащему той же сети 10.0.0.0. Маршрутизатор R2 используя маску подсети ин-
терфейса, с которого он получил обновление, устанавливает маску подсети для
принятого маршрута равную 16 битам.
Маршрутизаторы R2 и R3 точно также передают в обновлениях между
собой информацию о подсетях сети 172.16.0.0, потому что они имеют непо-
средственное подключение в этой сети.
Маршрутизатор R2 знает обо всех подсетях как сети 10.0.0.0, так и сети
172.16.0.0. Однако маршрутизатор R2 сначала суммирует информацию о подсе-
тях 10.1.0.0 и 10.2.0.0, прежде чем передать ее маршрутизатору R3, потому что
тот не имеет интерфейсов подключенных к сети 10.0.0.0. Маршрутизатор R2
передает маршрут 10.0.0.0 в сеть 172.16.0.0, точно также R2 передает маршрут
172.16.0.0 в сеть 10.0.0.0.
3.3.2 Суммирование маршрутов в разобщенных классовых сетях
На рисунке 3.8 показана ситуация в которой две подсети сети 10.0.0.0
подключаются через маршрутизатор принадлежащей сети 172.16.0.0.
R2 R1 R3
172.16.1.0 10.2.0.010.1.0.0
10.1.0.0
172.16.1.0
172.16.2.0
10.0.0.0 S0
10.0.0.0 S1
172.16.1.0
172.16.2.0
10.2.0.0
172 .16.1.0
172 .16.2.0
172 .16.2.0
S0 S1
Рисунок 3.8 – Суммирование маршрутов при разделении сети
Так как маршрутизатор R1 использует описанный выше алгоритм назна-
чения масок подсетей для полученных маршрутов, его таблица маршрутизации
будет содержать две записи о сети 10.0.0.0, что эта сеть находиться и за интер-
фейсом S0 и за интерфейсом S1.
В такой ситуации в среднем половина пакетов для подсетей сети 10.0.0.0
будет уходить не на тот интерфейс, а, следовательно, теряться.
Поэтому при использовании классовой маршрутизации не разрешается
разобщать подсети, принадлежащие одной сети.
Протоколы классовой маршрутизации не поддерживают суммирование
маршрутов в произвольных точках адресного пространства. Это связано с тем,
что при классовой маршрутизации используется технология FLSM, а при ис-
пользовании механизма суммирования полученный маршрут получает мень-
шую маску подсети, что невозможно при использовании данной технологии.
52
3.4 Обзор бесклассовых протоколов маршрутизации
Бесклассовые протоколы маршрутизации можно назвать вторым поколе-
нием протоколов маршрутизации, потому что они разрабатывались, чтобы
снять ограничения которые накладывали классовые протоколы маршрутизации.
К бесклассовым протоколам относятся такие протоколы как RIP v2, EIGRP и
OSPF.
Главным недостатком классовых протоколов маршрутизации являлось
то, что маска подсети не передается в обновлениях маршрутной информации,
поэтому необходимо использования одной и той же маски подсети для всех
подсетях в пределах одной сети. При использовании бесклассовых протоколов
маршрутизации применяется технология VLSM, подсети одной сети могут
иметь маски переменной длины (Рисунок 3.9).
R2
R4
R3
R1
172.16.14.0/27
172 .16.14.32/27
172 .16.14.64/27
172.16.13.0/24
172.16.12.0/24
172 .16.14.228 /30
1
7
2
.
1
6
.
1
4
.
2
2
4
/
3
0
1
7
2
.
1
6
.
1
4
.
2
3
2
/
3
0
Рисунок 3.9 – Бесклассовая маршрутизация
При использовании бесклассовых протоколов маршрутизации информа-
ция о маске подсети передается в пакете обновления маршрутной информа-
ции. Исходя из этого, таблицы маршрутизации также содержат маршруты с
указанием масок подсетей. При обработке трафика, в качестве маршрута по
которому он будет отправлен, выбирается маршрут с наибольшим совпадени-
ем префикса сети, действует принцип наибольшего совпадения маршрута.
3.4.1 Суммирование маршрутов при бесклассовой маршрутизации
Другим недостатком классовых протоколов маршрутизации является
автоматическое суммирование маршрутов при переходе через границу сети.
В бесклассовых протоколах маршрутизации процесс суммирования маршру-
тов можно контролировать вручную, создавая суммарные маршруты в ключе-
вых точках сети, причем можно производить суммирование на любое количе-
ство бит в пределах адреса. Поскольку маршруты на подсети распространя-
53
ются в пределах всего домена маршрутизации, ручное суммирование марш-
рутов может позволить уменьшить размер таблиц маршрутизации.
По умолчанию бесклассовые протоколы маршрутизации, такие как RIP
v2 и EIGRP производят автоматическое суммирование на границе сети, так
же как это делают протоколы классовой маршрутизации. Автоматическое
суммирование в эти протоколы добавлено для совместимости с их предше-
ственниками RIP v1 и IGRP. В отличие от предшественников, в протоколах
RIP v2 и EIGRP можно отключить автоматическое суммирование, используя
команду no auto–summary в настройках протокола маршрутизации, причем,
начиная с версии IOS 12.2(8)T для протокола EIGRP функция автоматическо-
го суммирования по умолчанию отключена. Протокол OSPF не использует
автоматическое суммирование.
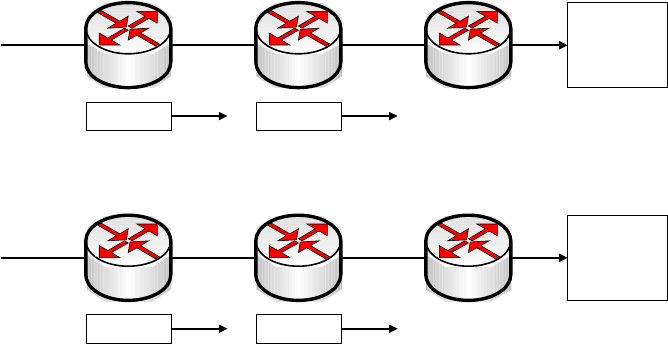
На рисунке 3.10 изображены сети с протоколом маршрутизации RIP v2
и EIGRP и протоколом OSPF.
R1 R2 R3
172 .16.2.0/24 172.16.1.0/24 10.1.0.0/16
172 .16.2.0/24
Таблица
маршрутизации
10.1.0.0/16
172.16.0.0/16
172 .16.0.0/16
RIP v 2
EIGRP
R1 R2 R3
172 .16.2.0/24 172.16.1.0/24 10.1.0.0/16
172 .16.2.0/24
Таблица
маршрутизации
10.1.0.0/16
172.16.1.0/24
172.16.2.0/24
172 .16.1.0/24
172 .16.2.0/24
OSPF
Рисунок 3.10 – Эффект использования автосуммирования
В сети RIP v2 или EIGRP, маршрутизатор R2 автоматически производит
суммирование маршрутов до 172.16.1.0/24 и 172.16.2.0/24 в маршрут
172.16.0.0/16 перед отправкой маршрутизатору R3. Поэтому маршрутизатор
R3 в своей таблице маршрутизации имеет запись только о суммарном марш-
руте на сеть 172.16.0.0/16.
В сети OSPF, маршрутизатор R2 не производит автоматического сум-
мирования маршрутов и отправляет маршрутизатору R3 полную маршрутную
информацию, содержащую подсеть и маску подсети. Поэтому маршрутизатор
R3 имеет в своей таблице маршрутизации записи маршрутов до обеих подсе-
тей сети 172.16.0.0/16.
54
R1 R2 R3
172 .16.2.0/24 172.16.1.0/24 10.1.0.0/16
172 .16.2.0/24
Таблица
маршрутизации
10.1.0.0/16
172.16.1.0/24
172.16.2.0/24
172 .16.1.0/24
172 .16.2.0/24
RIP v 2
EIGRP
R1 R2 R3
172 .16.2.0/24 172.16.1.0/24 10.1.0.0/16
172 .16.2.0/24
Таблица
маршрутизации
10.1.0.0/16
172.16.1.0/24
172.16.2.0/24
172 .16.1.0/24
172 .16.2.0/24
OSPF
Рисунок 3.11 – Эффект отключения автосуммирования
Когда автоматическое суммирование маршрутов отключено (Рисунок
3.11) протоколы RIP v2 и EIGRP, так же как и OSPF при рассылке обновлений
маршрутной информации через границу класса сети включают в нее инфор-
мацию о масках подсетей.
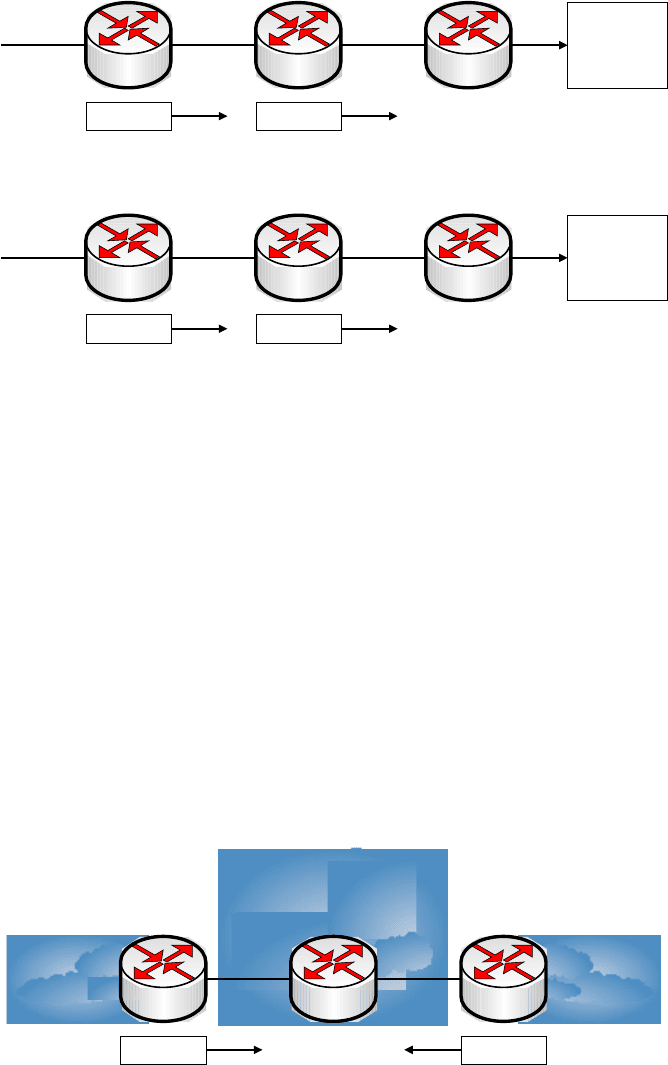
3.4.2 Суммирование маршрутов в разобщенных классовых сетях
Использование автоматического суммирования маршрутов в бесклассо-
вых протоколах маршрутизации вызывает такие же проблемы что и классовое
суммирование маршрутов, если появляются разобщенные подсети (Рисунок
3.12).
192.168.1.0/24
172 .16.5.0/24
172 .16.7.0/24
172 .16.6.0/24
172 .16.9.0/24
172 .16.0.0/16 172 .16.0.0/16
R2 R1 R3
Рисунок 3.12 – Суммирование в бесклассовых
протоколах маршрутизации
Маршрутизатор R1 не может определить какие подсети подключены к
маршрутизаторам R2 и R3, т.к. но получает только суммарный маршрут на
сеть 172.16.0.0/16.
В протоколах бесклассовой маршрутизации такие проблемы решаются
отключением автоматического суммирования маршрутов хотя бы на одном из
55

маршрутизаторов. Протоколы бесклассовой маршрутизации используют ме-
ханизм наибольшего соответствия при выборе маршрута. Поэтому если
маршрутизатор R1 будет знать маршруты на 172.16.6.0/24, 172.16.9.0/24 и
суммарный маршрут на 172.16.0.0/16, он сможет правильно маршрутизиро-
вать трафик к маршрутизаторам R2 и R3. Трафик до R3 будет использовать
маршруты до подсетей 172.16.6.0/24 и 172.16.9.0/24, а трафик до маршрутиза-
тора R2 будет отправляться по суммарному маршруту 172.16.0.0/16.
3.5 Категории алгоритмов маршрутизации
Большинство алгоритмов маршрутизации может быть отнесено к одной
из трех категории:
– дистанционно-векторные протоколы;
– протоколы с учетом состояния канала;
– сбалансированные гибридные протоколы.
Дистанционно-векторный протокол (distance vector routing protocol)
определяет направление, или вектор, и расстояние до нужного узла объеди-
ненной сети.
Протокол с учетом состояния канала (link-state routing protocol), также
называется алгоритмом выбора кратчайшего пути (shortest path first – SPF),
воссоздает топологию сети на каждом маршрутизаторе.
Сбалансированный гибридный протокол (balanced hybrid routing pro-
tocol) соединяет в себе определенные черты обоих предыдущих типов алго-
ритмов.
3.5.1 Особенности дистанционно-векторных протоколов
При использовании дистанционно-векторных алгоритмов между марш-
рутизаторами происходит периодическая пересылка копий таблиц маршрути-
зации друг друга. В таких регулярных обновлениях маршрутизаторы сообща-
ют друг другу об изменениях в топологии сети. Дистанционно-векторные ал-
горитмы маршрутизации также называются алгоритмами Белламана–Форда
(Bellaman–Ford).
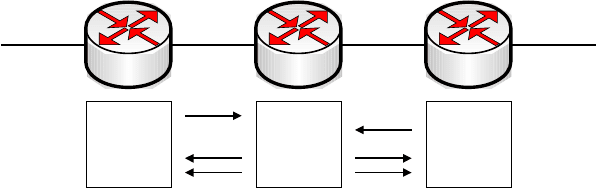
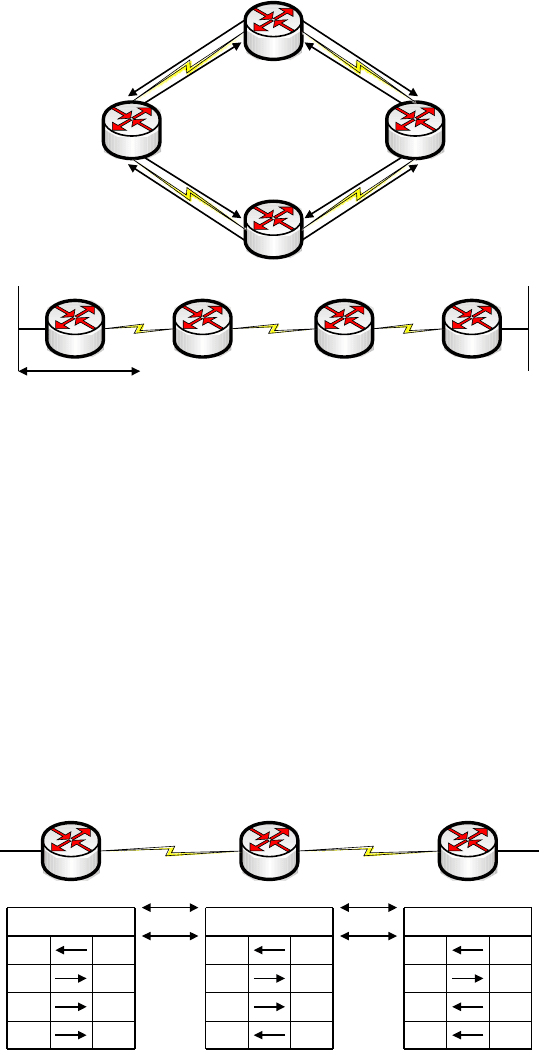
На рисунке 3.13 каждый маршрутизатор получает таблицу маршрутиза-
ции от соседних маршрутизаторов. В частности маршрутизатор R2 получает
информацию от маршрутизатора R1. Маршрутизатор R2 добавляет значение
вектора расстояния, количества переходов, что увеличивает результирующий
вектор расстояния. После этого маршрутизатор R2 передает свою новую та-
блицу маршрутизации своему соседу, маршрутизатор R3. Такой пошаговый
процесс происходит на всех соседних маршрутизаторах.
56
R1
R2
R3
R4
R1R2R3R4
Рисунок 3.13 – Концепция дистанционно-векторной маршрутизации
В дистанционно-векторном алгоритме накапливаются расстояния в
сети, что позволяет поддерживать базу данных, содержащую информацию о
топологии сети. Однако дистанционно-векторные алгоритмы не предостав-
ляют маршрутизаторам точную топологию всей сети, поскольку каждому
маршрутизатору известны только соседние с ним маршрутизаторы.
Каждый маршрутизатор, использующий дистанционно-векторную
маршрутизацию, начинает свою работу с определения соседних маршрутиза-
торов.
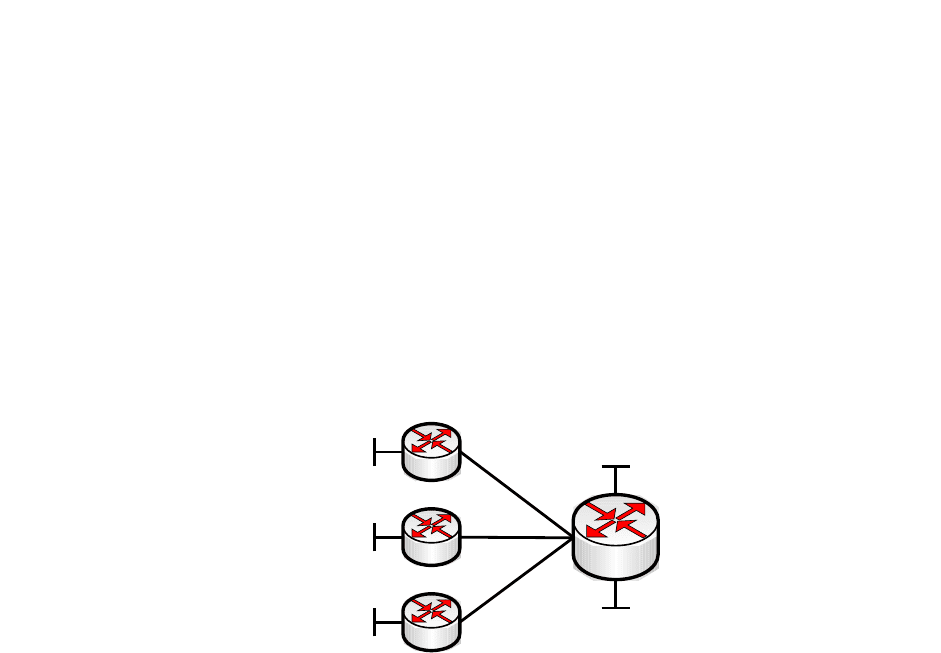
R1 R2 R3
X Y ZW
Таблица
маршрутизации
W 0
0
1
2
X
Y
Z
Таблица
маршрутизации
X 0
0
1
1
Y
Z
W
Таблица
маршрутизации
Y 0
0
1
2
Z
X
W
Рисунок 3.14 – Процесс построения структуры сети в
дистанционно-векторной маршрутизации
На рисунке 3.14 проиллюстрировано формирование вектора расстоя-
ния. Для каждого интерфейса, ведущего к непосредственно подключенной
сети, вектор расстояния устанавливается равным нулю. По мере того, как
процесс расчета вектора расстояния продолжается маршрутизаторы находят
наилучший маршрут к сетям получателям на основе информации, которую
они получили от своих соседей.
57
Применение дистанционно-векторной маршрутизации накладывает
жесткие ограничения по диаметру сети передачи данных. Такие протоколы
маршрутизации не предназначены для функционирования в больших объеди-
ненных сетях с множеством каналов связи, где маршрутизаторы соединяют
сотни или даже тысячи сетей. Максимальный диаметр сети определяет рас-
стояние, на которое можно передать пакет, после чего пункт назначения счи-
тается недостижимым. Это максимальное расстояние измеряется числом
пересылок от отправителя к получателю. Правило максимального расстояния
гласит: Между двумя нельзя установить соединение, если они находятся на
расстоянии более чем X пересылок.
Для протоколов RIP v1 и v2 максимальное число пересылок равно 15.
Это означает, что диаметр сети не должен превышать 15 маршрутизаторов.
Еще одним важным понятием в дистанционно-векторных алгоритмах
маршрутизации является сходимость сети. Сходимость достигается, когда все
маршрутизаторы внутри домена маршрутизации имеют согласованную ин-
формацию о доступных маршрутах. Дистанционно-векторные протоколы тре-
буют рассылки маршрутизаторами своей таблицы маршрутизации всем своим
соседям. Частотой рассылки управляют таймеры. Когда маршрутизатор полу-
чает обновление маршрутной информации, он, прежде чем передавать тра-
фик, должен произвести пересчет всех маршрутов и обновить таблицу марш-
рутизации.
Дистанционно-векторные протоколы отличаются медленной сходимо-
стью, и поэтому весьма подвержены возникновению петель маршрутизации.
Время, которое требуется, для того чтобы все маршрутизаторы обработали
обновление маршрутной информации и обновили свои таблицы маршрутиза-
ции, называется временем сходимости. Это очень важный параметр сети, по-
скольку при отказе канала или маршрутизатора данные не передаются в
объединенной сети до тех пор, пока все таблицы маршрутизации не будут
полностью обновлены.
3.5.2 Маршрутизация по состоянию канала
Вторым базовым алгоритмом маршрутизации является алгоритм выбо-
ра маршрута по состоянию канала. Такие алгоритмы известны как алгоритмы
Дейкстры (Dijkstra) или как алгоритмы выбора кратчайшего пути (Shortest
Path First – SPF). Они поддерживают сложную базу топологии сети. Дистан-
ционно-векторные алгоритмы не содержат определенной информации об уда-
ленных сетях и маршрутизаторах, алгоритмы с использованием состояния ка-
нала поддерживают полную информацию об удаленных маршрутизаторах и
их соединениях друг с другом. Одним из самых широко распространенных
протоколов маршрутизации с учетом состояния канала является протокол
OSPF. Ключевыми понятиями алгоритмов по состоянию канала являются:
58
– сообщение о состоянии канала (Link-State Advertisement - LSA). Эти
объявления представляют собой небольшие пакеты, которые содержат ин-
формацию об известных маршрутизатору каналах связи;
– база данных топологии (Topological Database). Эта база данных содер-
жит информацию, полученную в сообщениях LSA;
– алгоритм выбора кратчайшего пути (Shortest Path First – SPF). Алго-
ритм осуществляет вычисления над базой данных топологии сети, результа-
том чего является построение связующего дерева протокола SPF.
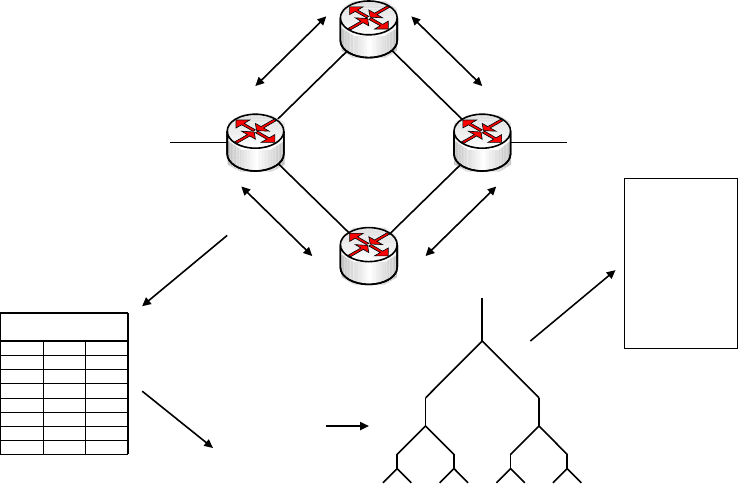
На рисунке 3.15 проиллюстрированы основные операции алгоритма
маршрутизации на основе состояния канала.
База данных
топологии сети
SPF
Таблица
маршрутизации
Дерево SPF
L
S
A
L
S
A
L
S
A
L
S
A
Рисунок 3.15 – Основные действия алгоритма маршрутизации
на основе состояния канала
Маршрутизаторы обмениваются сообщениями LSA, начиная с непо-
средственно подключенных сетей. Каждый маршрутизатор параллельно с
остальными создает свою базу данных топологии сети, состоящую из инфор-
мации, полученной из сообщений LSA.
Алгоритм SPF вычисляет доступность сетей. Маршрутизатор строит ло-
гическую топологию в виде дерева, корнем которого является он сам, а ветвя-
ми - все возможные маршруты ко всем сетям, входящим в домен маршрутиза-
ции. Потом алгоритм SPF удаляет излишние связи в дереве, оставшееся дере-
во является деревом кротчайших путей ко всем известным сетям домена
маршрутизации, в который входит данный маршрутизатор. Полученные
маршруты до сетей получателей вносятся в таблицу маршрутизации.
59
Если маршрутизатор узнает об изменении состояния канала, он рассы-
лает эту информацию остальным маршрутизаторам домена маршрутизации с
тем, чтобы они смогли отразить ее в своих базах топологии сети. При получе-
нии маршрутизатором пакета LSA его база топологии сети обновляется в со-
ответствии с последней полученной информацией. При получении каждого
пакета LSA, содержащего изменения состояний каналов, алгоритм SPF заново
вычисляет наилучшие маршруты и обновляет таблицу маршрутизации.
Время сходимости протоколов маршрутизации с учетом состояния ка-
налов связи значительно меньше, чем у дистанционно-векторных протоколов
маршрутизации. Это связано с тем, что каждый маршрутизатор в домене
маршрутизации имеет информацию о реальной топологии сети и может само-
стоятельно производить пересчет маршрутов к сетям получателям при полу-
чении пакетов LSA с изменениями топологии сети. Фактически временем
сходимости сети будет время необходимое для расчета нового SPF дерева по-
сле получения изменений топологии сети.
При использовании протоколов состояния канала возникают две основ-
ные проблемы:
– перегрузка процессора служебной информацией;
– повышение требований к оперативной памяти.
Маршрутизаторы, на которых работают протоколы маршрутизации с
учетом состояния канала, требуют большего объема памяти и выполняют
больший объем обработки данных, чем при использовании дистанционно-
векторных протоколов маршрутизации.
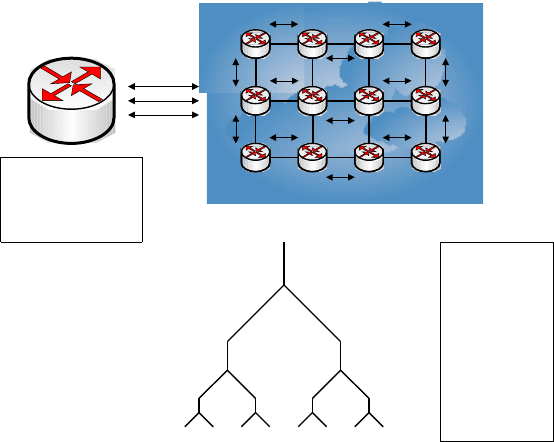
Как показано на рисунке 3.16, маршрутизаторы должны иметь доста-
точно памяти для сохранения большого объема информации в базе топологии
сети.
Таблица
маршрутизации
Дерево SPF
SPF
База данных
топологии сети
Рисунок 3.16 – Проблемы протоколов состояния канала
60