Бокр Й. Новая парадигма логического управления
Подождите немного. Документ загружается.

21
так, что в их состав вводят всякого рода движители, как например ходовые винты; тяговые,
цепные, ременные, зубчатые и гидромеханические передачи; подающие механизмы,
сбрасыватели, электро-передачи, продуктопроводы и т.п., обеспечивающие, по сути дела,
кажущееся стихийное выполнение траекторий в объекте. Хотя движители естественно
движутся, в системе автоматического логического управления, как ни
странно, играют роль
статических элементов. Но, упомянутые управляющие движители не считают, почему-то,
Рис. 4. 1. Земное тяготение (mg), субъект и потенциально-динамический бак как доли
целостного динамического агрегата.
достаточно важными, чтобы войти в состав управляющего автомата. И бывает, что
разработчику автомата заданного объекта, в самом деле, нечего делать, ибо
объект
„самоуправляем“, т.е. объект уже не потенциально-динамический, а в месте с движителами
образует динамическую систему управления. Ярким примером выше сказанного может
служить стрелковое оружие – автомат АК – 47. Перед выстрелом заводится замок, патрон
вводится и возвращая пружиной сжатия затвора замок, патрон попадает в патронник.
Нажимая спусковой крючок, подводят патрон к
выстрелу. Часть газов, возникших
выстрелом, отводится к обратному поршню, повторно, вместе с пружиной сжатия,
заводяшему затвор и, таким образом, стрельба автоматически продолжается. Применив
холостой патрон и не используя стволную насадку, автомат станет не управляемой
винтовкой. Короче говоря, AK – 47 без стволной насадки и с холостыми патронами не
является динамическим логическим объектом.
Стало
быть, проектировщик автоматики заданного объекта, считает объект всегда
динамическим или в своем воображении, или игнорируя управляющие движители,
внедренные в объект технологом.
В случае объекта виднее чем в случае логических цепей с обратными связями, что
переход между состояниями объекта не вызывает одно лишь управляющее воздействие,
возможно вместе с возмущением. Внешнее воздействие
на систему управления переход
в системе лишь инициирует, а исполняет переход его исходное состояние. Например, вряд
ли можно утверждать, что нажатие спускового крючка AK – 47 вызывает автоматически
повторяемые выстрелы, но можно согласиться, что нажатие спускового крючка разрешает
стрельбу, а сам выстрел автомата приводит к последовательному выстрелу. Или, сигнал
дежурного по станции инициирует отправление
поезда, находящегося в станции, но едва
ли сигнал отправления его исполняет, ибо только движение двигателя перемещает поезд
☺
задвижка
открыта
закрыта
резервуар
Д
1
Д
2
mg

22
из остановки в остановку. Или, в случае лягушки, прыгающей из одного листа кувшинки на
другой, вряд ли один стимул может вызвать прыжок лягушки; стимул прыжок лишь
инициирует, а исполняет прыжок сама лягушка. Приведенный факт иллюстрируют примеры
3.2. и 3.3., где аппаратура, состоящая из насоса и двух резервуаров и кабина лифта
представляют
собой лишь потенциально-динамические объекты, которые только совместно
с управляющими автоматами образуют динамическую систему автоматического
управления. Метафорически сказано: управляющий автомат „оживляет“ „мертвый“
потенциально-динамический объект управления. Следует однако отметить, что потенциаль-
но-динамический объект не есть статический.
Способы построения конечно-автоматных моделей и наложения их на объекты управле-
ния в
теорию логического управления обычно не входят; анализ этих способов важная
нерешенная проблема. Факт, что хотя конечные автоматы объектов управления приходится
разрабатывать по интуизции, не дает основание ими, как правило, не пользоваться. Тем
более не уместно игнорировать конечные автоматы с возмущающими входами, хотя
нередко на объекты измеримые возмущения воздействуют, а наоборот, не
воздействуют ли
измеримые возмущения на объект управления, воздействуют иногда на управляющий
автомат [6,14,21]. Более того, хотя и упоминаются фундаментальные понятия как
наблюдаемость и управляемость объектом [17], считают, хотя объект управления, как
правило, задается лишь вербально и зачастую не на состоянческом уровне детализации (см.
пример 3.4.), по умолчанию, объект управления,
как будто само собой разумеется,
наблюдаемым и управляемым [4,5,8,11,12,13,17]. Главное внимание уделяется построению
конечно-автоматной модели управляющего автомата [4,5,7,8,9,11,12,13.15,17,23], который
представляет собой, таким образом, некоторый „суррогат“ объекта управления, не
располагая моделью объекта.
Стараясь управлять недетерминированным динамическим объектом, т.е. заставляя
объект автоматически двигаться вдоль принужденной траектории состояний, ибо
собственные траектории состояний в объекте не устраивают технолога, и не распологая
измеримыми возмущениями или задающим управлением или игнорируя требование,
накладываемое на собственные траектории состояний, вряд ли можно обратиться к системе
управления по Глушкову.
Статический, в отличие от динамического, управляющий автомат не распологает
„памятью“ для того, чтобы, в случае импульсных датчиков
состояний объекта управления,
проложить мост над продолжительностью перехода между состояниями в объекте
управления. Пусть состояния двоичного объекта кодируются унитарно
{
}
(
:1 ,0:
S
Sk →
... 0 0
21
a
i
s
(
)
(
)
)
Хемминга вес где ,1 е. т ,0 ... 0 1 0
11
−
=
+− HiH
S
iii
wskw
. Тогда, если авто-
мат статический и если датчики состояний в объекте потенциальные (уровневые) Д
у
или
импульсные Д
и
, то для, без потери общности, достоверного перехода
[]
()
, , zxss
O
δ
=
′
имеет
место рис.4.2., где элементы запрета или задержек препятствуют состязаниям в кодовых
словах состояний s и s′, а Д
у
или опорный RS – триггер “отождествляют“ промежуточное
состояние перехода из s в s′ с исходным состоянием s перехода (см. приложение 3) [24,25].
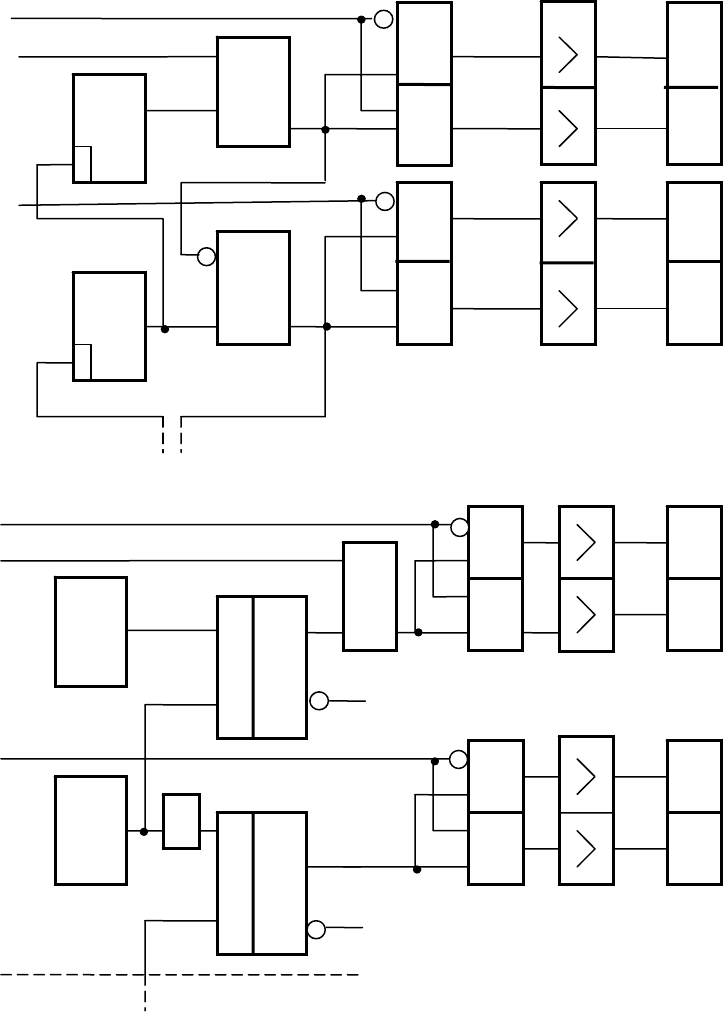
23
Рис.4. 2 Фрагменты цепочек состоящих из: а) потенциальных (Д
у
), b) импульсных (Д
и
)
датчиков, совершающих переход
[
]
(
)
, , zxss
O
δ
=
′
в двоичной системе управ-
ления, из усилителей, логических переходных устройств и исполнительных
механизмов (акторов) А.
Займемся еще раз минимальным, по числу состояний, управляющим автоматом Мили.
Интересно отметить, что автор, когда независимо от Беллмана показал, что управляющий
автомат Мили статический [24], встретился с преобладающей отрицательной реакцией
теоретиков, а не
практиков. Но, защитившись авторитетом и назвав статический
управляющий автомат Беллмановым [26], возражения утихли. Поскольку принцип
Д
у
Д
у
&
&
&
&
z
&
z′
y
y′
a)
start
&
A
A
A
R
R
A
Д
и
b)
&
&
R
S
A
z′
z
Д
и
R
S
H
y
′
y
A
A
A
&
&
&
start
24
управления по Беллману:
управление динамическим объектом является функцией
состояния объекта управления, лишь постулируется, стоит его доказать. Действительно,
поскольку исходное состояние любого перехода каждой принужденной траектории
состояний в объекте управления является необходимой причиной перехода, то, подводя
реакцию
()(
,
0
syy Λ= или же
(
))
ys
1
0
−
Λ= на вход объекта управления, распологают так-же
причиной достаточной перехода. Таким образом, состояние объекта управления становится
одновременно необходимой и достаточной причиной перехода в объекте управления в
системе управления – рис.3.1.а).
4. Нововведенное традиционное логическое управление динамическим объектом
Напомним, что если собственные траектории состояний (2)/(3) в объекте устраивают
технолога, то хватит управлять объектом директивно.
Гораздо интереснее выглядит случай, когда, хотя распологаем динамическим объектом
О (1), его собственные траектории состояний не устраивают заказчика. Пусть поэтому
технолог настаивает на выполнении собственных траекторий состояний, избыраемых
задающим управлением, устраивают его которые в задуманном конечном
автомате
(прототипе)
[
]
HTT
qVQZUT , , , , , Λ×=
δ
, (13)
где U, Q, V – алфавит соответственно задающих управлений для
выбора требуемых
собственных траекторий
состояний в системе управления, состояний, выходов, δ
Т
– от-
ношение
qq, u, QUQ
T
′
×× : :
δ
,
в частности функция
[
]
[
]
qzq, u,QZUQ
T
′
→××
a : :
δ
,
переходов, Λ
Т
– функция (инъективная)
vqVQ
T
a : : →Λ
выходов и q
H
– начальное состояние.
Рассмотрим систему управления из рис.3.1.b). Моделью статического управляющего
автомата есть т.н. автомат без памяти
[
]
A
XZYUA
λ
ˆ
, ,
ˆ
××= , (14)
где X – алфавит машинного управления
A
λ
ˆ
– функция выходов (машинных управлений)
[
]
[
]
xzu, y, XZYU
A
a : :
ˆ
→××
λ
.
Располагаем, надеясь, что наблюдаемым и управляемым, динамическим объектом
25
[
]
HOO
sYSZXO , , , , , Λ×=
δ
, (15)
где S, Y – aлфавит соответственно состояний, выходов, δ
O
– отношение
s xsSXS
O
′
×× ,, : :
δ
,
в частности функция
[
]
[
]
sz xsSZXS
O
′
→××
a ,, : :
δ
переходов, Λ
О
– функция выходов
ysYS
O
a : : →
Λ
и s
H
– начальное состояние. Моделью инновированной системы автоматического
логического управления служит конечный автомат
(
)
[
]
HL
sSZUOAN , , , ,
ˆ
δ
×= , (16)
где δ
L
– отношение, в частности функция, переходов
(
)
(
)
(
)
(
)
ssususss, u, SUS
OAOL
′
Λ=
′
×× , ,
ˆ
, proj , , : :
3
λδδ
,
спец.
[]
[
]
(
)
(
)
[
]
(
)
(
)
, ,
ˆ
, : : zsusszs, u, SZUS
OAOL
Λ=
′
→××
λδδ
a
Пусть требуется в концепционном объекте (образце) Т (13) выполнение некоторой
собственной траектории, причем распологаем объектом О (15), в котором (после кодирова-
ния состояний) желаемая траектория представляет собой не собственную, а некоторую
траекторию состояний принужденную.
Т е о р е м а 4. 1. Выше упомянутый имеющийся объект О (15) представляет собой
возможного заменителя в декомпозиции концепционного объекта Т (13) прототипа – рис.
3.1.b) [27,28] (см. приложение 4).
Д о к а з а т е л ь с т в о : Пусть заланы кодирования состояний sqSQk a:: → и вы-
ходов yvYV
a:: →
κ
. Требуется найти автомат
[
]
A
XZYUA
λ
ˆ
, ,
ˆ
××= , или же
A
λ
ˆ
, при
существовании мономорфизма
〈k, κ〉 образца T (13) в систему управления
(
)
OAN ,
ˆ
(16).
Иными словами, выполняется ли импликация
() ()
(
)()
(
)
(
)
(
)
(
)()
(
)
qkqkuqkqkuqkquq
OAOLT
′
Λ⇒
′
⇒
′
, ,
ˆ
, , , , ,
λδδδ
, ( 17)
в частности равенство
LT
kk
δ
δ
oo
=
,
или же
[]
()()
(
)
[
]
()
(
)
(
)
(
)
[]
(
)
(
)
zqkuqkzuqkzuqk
OAOLT
, ,
ˆ
, , , , , Λ==
λδδδ
, (18 )
и равенство
26
OT
k
Λ
=
Λ oo
κ
,
или же
(
)()
(
)
(
)
qkq
OT
Λ
=
Λ
κ
.
ибо диаграмма композиций функций (рис.4.1.) коммутативна, то находим машинное
управление
()()(
, ,
ˆ
qkux
OA
Λ=
λ
[]
z
).
О п р е д е л е н и е 4. 1. Удастся ли по импликации (17), спец. по равенству (18)
определить функцию выходов управляющего автомата
A
ˆ
(14) при заданном кодировании
состояний, то заданный объект является
управляемым.
Сказано по другому, управляемый объект управления (заменитель желаемого автомата)
способен посредством своих, машинным управлением принужденных траекторий состоя-
ний, иммитировать требуемые собственные траектории состояний в конечном автомате, Т
(13).
О п р е д е л е н и е 4. 2. Заменитель или управляемый объект управления назовем
универсальным заменителем или абсолютно управляемым объектом, имеет ли место
равенство
()
(
)
(
)
(
)
s , , ,
′
∃
′
∀ xsxss
O
δ
,
в частности
[3]
()
()
[
]
(
)
[
]
(
)
(
)
szxszxss
O
′
=∃∃
′
∀ , , ,
δ
.
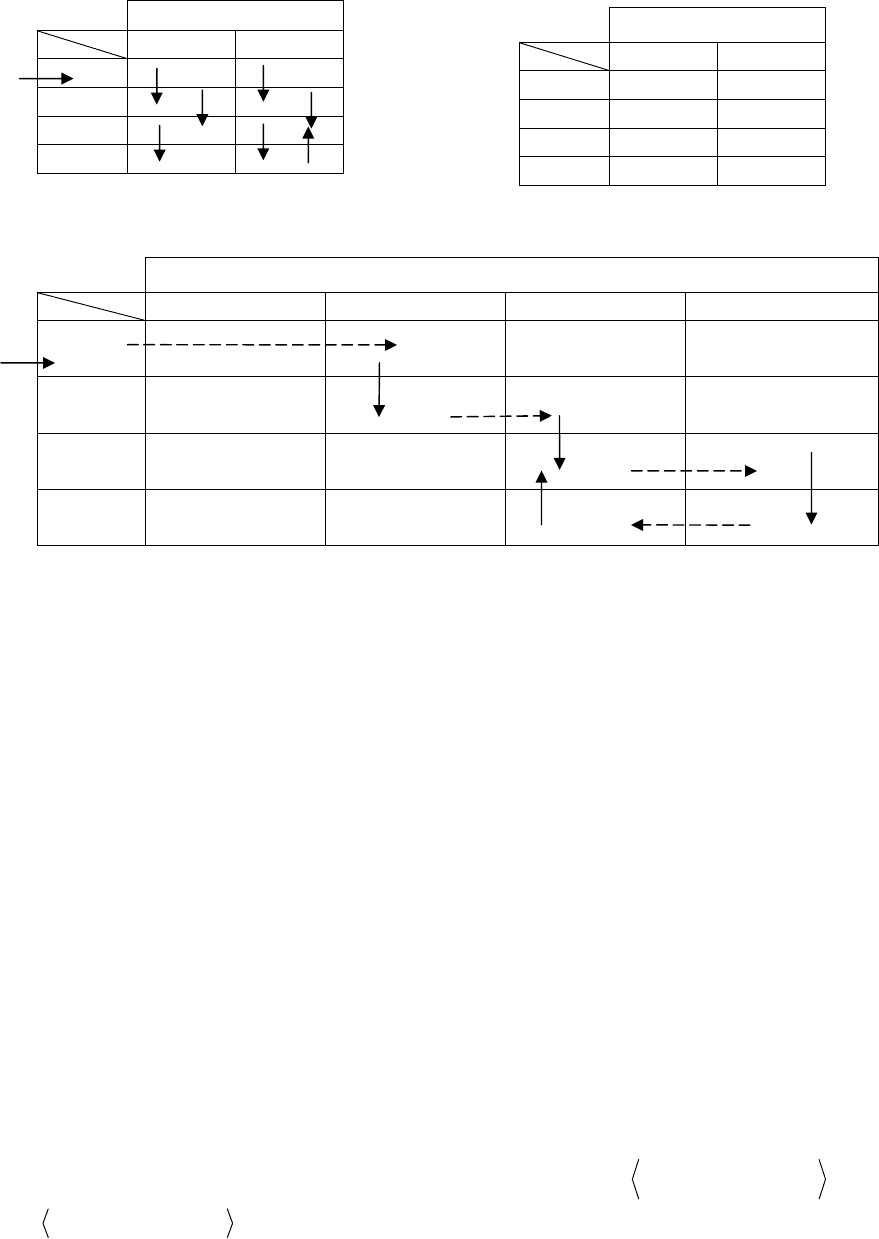
Пример 4. 1.: Найти принужденные траектории состояний в универсальном детерми-
нированном заменителе (абсолютно управляемом детерминированном объекте), представ-
ленном параллельным регистром из двух элементов задержек, т.е. в таблице переходов
заменителя (таб.4.1.c)), если желаемый объект задан таблицей переходов (таб.4.1.a)), причем
кодирование состояний прототипа
{
}
{
}
104 ,113 ,012 ,001:1,04,3,2,1
2
aaaa→ , преоб-
разует таб.4.1.а) в таб.4.1.b).
Q × U × [Z]
S
× U × [Z]
Q
S
k k
δ
T
δ
L
Рис.4.1. Диаграммы композиций
k
T
o
δ
и
L
k
δ
o или
κ
o
T
Λ
и
O
k
Λ
o функций δ
T
, δ
L
,
Λ
T
, Λ
O
, k, κ.
k
Q
S
V
Y
κ
Λ
T
Λ
O
27
Таб. 4. 1.
a) b)
s
′
s x a b
1 2 2
2 3 3
3 4 4
4 (4) 3
c)
21
qq
′
′
q
1
q
2
D
1
D
2
00 01 11 10
0 0
a, b
(0 0)
0 1
1 1
1 0
0 1
0 0
a, b a,
(0 1)
b
1 1
1 0
1 1
0 0
0 1 a, b a,
(1 1)
b
1 0
1 0
0 0
0 1
b b
1 1
a, b
(1 0)
Совпадают ли задуманные собственные траектории прототипа с собственными
траекториями заменителя (при некотором кодировании состояний), то естественно u = x и
заменителем хватит управлять директивно.
5. Новая парадигма логического управления
Преобладающие технологические машины и устройства только кажутся динамическими
объектами, ибо лица, идентифицирующие машины и устройства, неумышленно отождест-
вляются с соответствующими концепционными управляющими автоматами, образуя, тем
самым, совместно с технологическими устройствами или машинами, динамические
системы управления.
О п р е д е л е н и е 5. 1. Объекты, в которых не выполняются собственные
траектории состояний под воздействием лишь задающего управления, назовем
потенци-
ально
- динамические [25,29].
Т е о р е м а 5. 1. В потенциально-динамических объектах выполняются собственные
траектории тогда, когда потенциально-динамические объекты входят в состав системы
управления (рис.3.1.b)) как объекты управления.
Д о к а з а т е л ь с т в о : Пусть
[
]
,
ˆ
, ,
ˆ
A
XZYUA
λ
××=
(
)
=,nOAN
ˆ
[]
HL
sSZU , , ,
δ
×= суть конечно-автоматные модели соответственно искомого управляю-
щего автомата (14) и системы управления (16) из рис.3.1.b) и пусть упорядоченная шестерка
21
qq
′
′
q
1
q
2
x
a b
0 0 0 1 0 1
0 1 1 1 1 1
1 1 1 0 1 0
1 0 (1 0) 1 1

28
nО =
[
]
HOnО
sYSZX , , , , , Λ×
δ
(19)
есть конечный, отнюдь не автомат, а псевдоавтомат, где
δ
nО
– отношение
sxSX
nО
′
×= , :
δ
,
в частности функция
[
]
[
]
szxSZX
nO
′
→×
a ,: :
δ
псевдопереходов, моделирующий потенциально-динамический объект управления.
Действительно, по рис.3.1.b) имеет место равенство
nОAOL
δλδ
oo
ˆ
Λ=
,
т.е.
()
()
(
)
(
)
SXXUYYSSUS
A
O
×⎯→⎯×⎯→⎯=××
Λ
oo
λ
ˆ
,
в частности
[]
()
()
[
]
(
)
[]
(
)
SZXXZUYYSSZUS
nO
A
O
L
⎯→⎯×⎯→⎯××⎯→⎯=⎯→⎯××
Λ
δ
λδ
oo
ˆ
.
Поскольку для любого перехода
(
)
sus
L
′
, ,
δ
, спец.
[
]
(
)
szus
L
′
=
, ,
δ
, каждой собственной
траектории, выбранной задающим управлением u
(
)
Uu
∈
, имеет силу
()
(
)
(
)
(
)
s , proj , , proj
23
′
Λ
=
′
ussus
OAnОL
λ
δ
δ
,
спец.
[]
()
(
)
[
]
(
)
[
]
(
)
zzuszus
OAnОL
, , , , ,
Λ
=
λ
δ
δ
,
то любой переход
()
sus
L
′
, ,
δ
, спец.
[
]
(
)
szus
L
′
=
, ,
δ
, каждой собственной траектории,
выбранной u, исполнен своим исходным состоянием s. Таким образом, выполнение любой
собственной траектории в системе управления по рис.3.1.b) обеспечено.
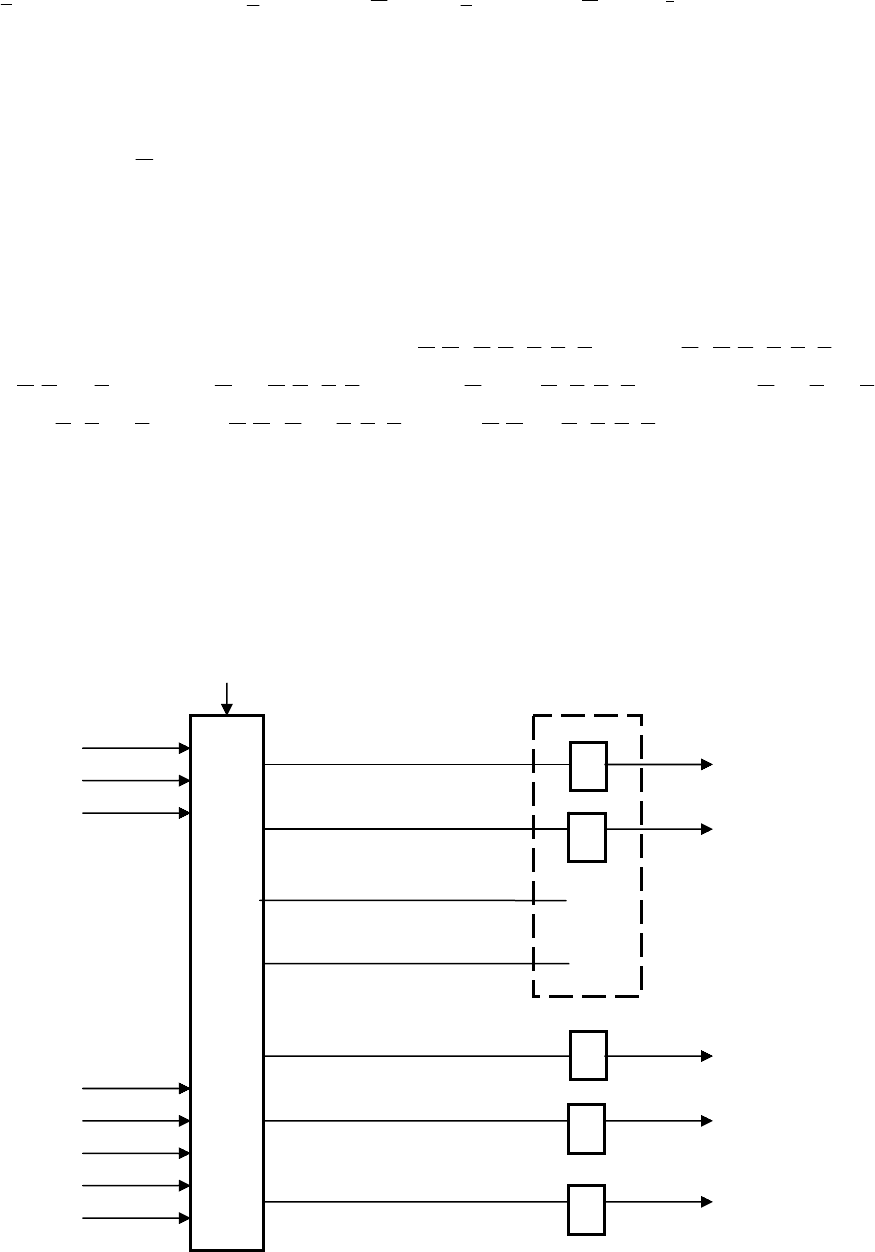
Пример 5.1. Система воздуха
[17] среднего давления состоит из клапана (K), компрессора
(C) и манометра (M). Акторы клапана (k) и компрессора (c) являются одновходовыми и
потенциональными (рис.5.1.). Состояние потенциально-динамического объекта управления
– упорядоченная семерка
321
~~~
~
~
~
~
TTTENCK
, где N – нормальная работа установки, E – не-
исправность работы, T
i
– выдержка во времени (i = 1,2,3) с тем, что:
,
стьнеисправно
ьисправност
~
,
норм.
ненорм.
~
,
открыт
закрыт
~
,
вкл.
выкл.
~
⎩
⎨
⎧
−
−
=
⎩
⎨
⎧
−
−
=
⎩
⎨
⎧
−
−
=
⎩
⎨
⎧
−
−
=
E
E
E
N
N
N
K
K
K
C
C
C
⎩
⎨
⎧
−
−
=
истекло
истекло не пока
~
ii
ii
i
TT
TT
T
. Машинное управление:
,
открыть
закрыть
~
⎩
⎨
⎧
−
−
=
Kk
Kk
k
29
⎩
⎨
⎧
−
−
=
⎩
⎨
⎧
−
−
=
⎩
⎨
⎧
−
−
=
⎩
⎨
⎧
−
−
=
включает уже
включает не пока
~
,
сигнал
сигнал
~
,
сигнал
сигнал
~
,
включить
выключить
~
i
i
i
t
t
t
Ee
Ee
e
Nn
Nn
n
Cc
Сc
c
.
Задающее управление: start, stop и R – разблокировка. При нажатии кнопки start
открывается K. После его открытия включается C и через 5 c после пуска C закрывается K.
Если через 20 c после пуска C давление M достигнет М
норм
, т.е. если на УА воздействует
возмущение
⎩
⎨
⎧
≥−
≤−
=
~
норм
норм
MMD
MMD
D , то горит лампочка N. В противном случае открывается
K, а затем горит лампочка E. Через 10 c после открытия K компрессор C останавливается и
K закрывается. Последующий запуск системы управления возможен после снятия E
нажатием кнопки R. При нажатии кнопки stop, когда C работает, открывается K. Через 10 c
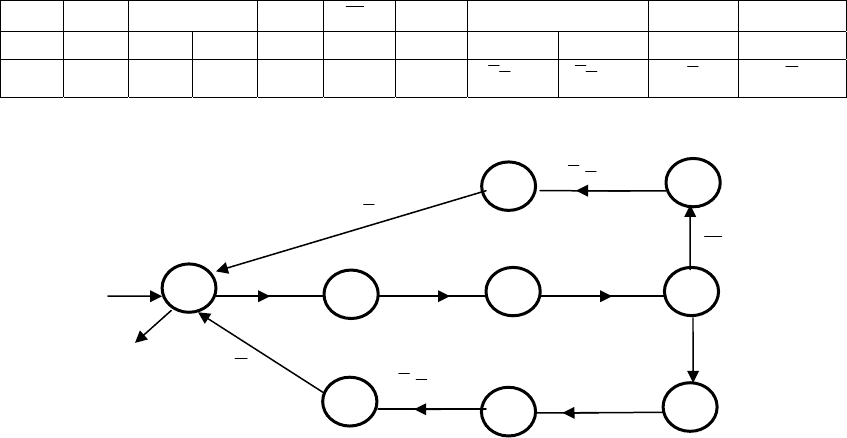
после открытия K остановливается C, а K закрывается. Диаграмма переходов системы
управления имеется на рис
. 5. 2. где 0 –
(
)
,
321
TTTENCK 1
()
,
321
TTTENCK− 2 –
–
()
,
321
TTTENCK 3 –
()
,
321
TTTENCK 4 –
(
)
,
321
TTTENCK 5
()
,
321
TTTENCK−
6 –
()
,
321
TTTENCK 7 –
()
,
321
TTTENCK 8 –
(
)
321
TTTENCK . Таб. 5. 1. – таблица
выходов управляющего автомата. Отметим, что срабатывание некоторых частей системы
воздуха среднего давления через определенное время осуществляется посредством
динамических функциональных элементов задержки (таймеров) – см. приложение 3.
Таймерами управляют лишь директивно, а обратные связи, в которых таймеры находятся,
не служат для управления ими, а лишь
для подачи осведомляющих сигналов об истечении
заданного времени в управляющий автомат.
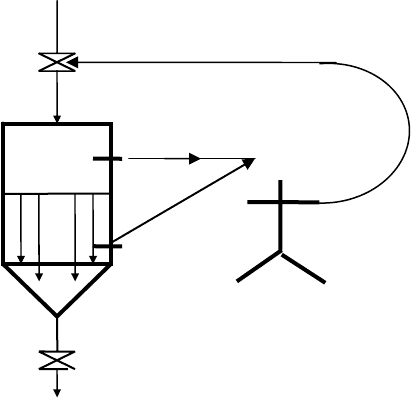
Рис. 5. 1. Система воздуха среднего давления из примера 5.1.
⊗
⊗
D
R
stop
start
K
C
K
K
C
C
N
E
k
T
1
c
n
e
t
1
t
2
t
3
T
2
T
3
T
1
T
2
T
3
5
10
20
A
ˆ
nО
Н
Н
Н
30
Таб. 5.1.
u , z start
D
D
stop R
s
0 1 2 3 3 4 5 6 7 8
x k c
t
1
t
3
nt
3
t
3
e
kn
ckt
2
e ntck
2
e n
Рис. 5. 2. Диаграмма переходов системы управления из примера 5.1.
Отношение δ
nО
псевдопереходов в nO можно, как неинтересное, игнорировать, а
функция λ
А
выходов (машинного управления) получается просто из конечно-автоматной
модели системы управления.
Требуется ли, чтобы эволюция системы N
(
A
ˆ
, nO) (16) протекала вдоль принужденных
траекторий состояний, строят состему N
(
h
A
ˆ
,N (
A
ˆ
, nO)) – рис. 3. 1. c), где
h
A
ˆ
– иерархи-
чески выше стоящий управляющий автоиат, управляет который динамической сыстемой
N
(
A
ˆ
, nO).
Пример 5. 2: Пусть дана квадратная игральная коробка длиной в d и три игральные кости
длиной в d/2 (рис.5.2.а)). Стараемся освободить левую верхнюю клетку коробки,
захвачивая, пока пустую, нижнюю клетку, передвигая кости вниз или направо через
отдельные клетки 1,2,3,4 вдоль траекторий или α : 4 → 2 → 1, или β : 4 → 3 → 1.
Свободную клетку
примем за состояние конечно-автоматной модели коробки. Не
пологается ли любезный читатель на сомнительный телекинез, ясно, что передвижение
костей в коробке обеспечивает собственноручно статический игрок1 (рис.5.2.c)). Моделью
динамической системы N
(игрок1, коробка) является полуавтомат с функцией переходов
по таб.5.2.а) с помеченными собственными траекториями состояний. Отсюда таблица
выходов игрока1 (таб.5.2.b)) и таблица псевдопереходов коробки (таб.5.2.c)). Функция
переходов системы N
(игрок1. коробка) с помеченными принужденными траекториями
состояний α, β (α - сплошная, β - штрихованная линия) имеется в таб.5.2.d). Пусть игрок1
и над ним вышестоящий игрок2 образуют двухединного игрока (рис.5.2.b)). Модель систе-
мы N
(игрок2, N (игрок1, коробка)), есть функция переходов (таб.5.2.e)), где stop, start α, start
β – управление задаваемое игроку2 распорядителем. Функция выходов игрока2 имеется
в таб. 5.2.f).
c
start k
D t
3
n
t
1
t
3
etck
2
eR
n
ntck
2
etD
3
7
5
3
4
2
1
0
6
8
stop kn