Білецький А.А. Організація і технологія будівельних робіт: Навч. посібник
Подождите немного. Документ загружается.

Організація і технологія будівельних робіт
71
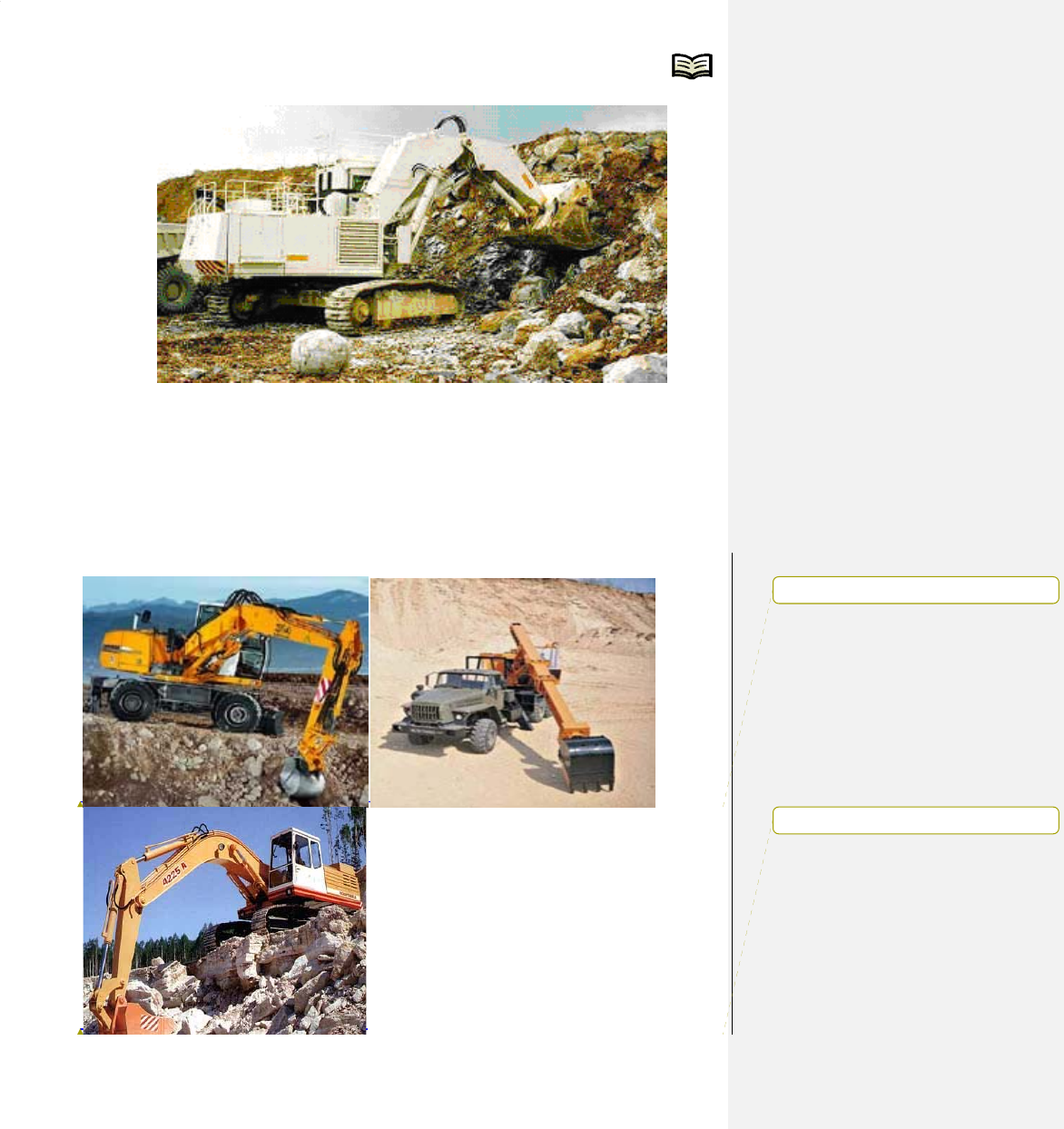
Рис. 2.27. Екскаватор з робочим обладнанням пряма лопата
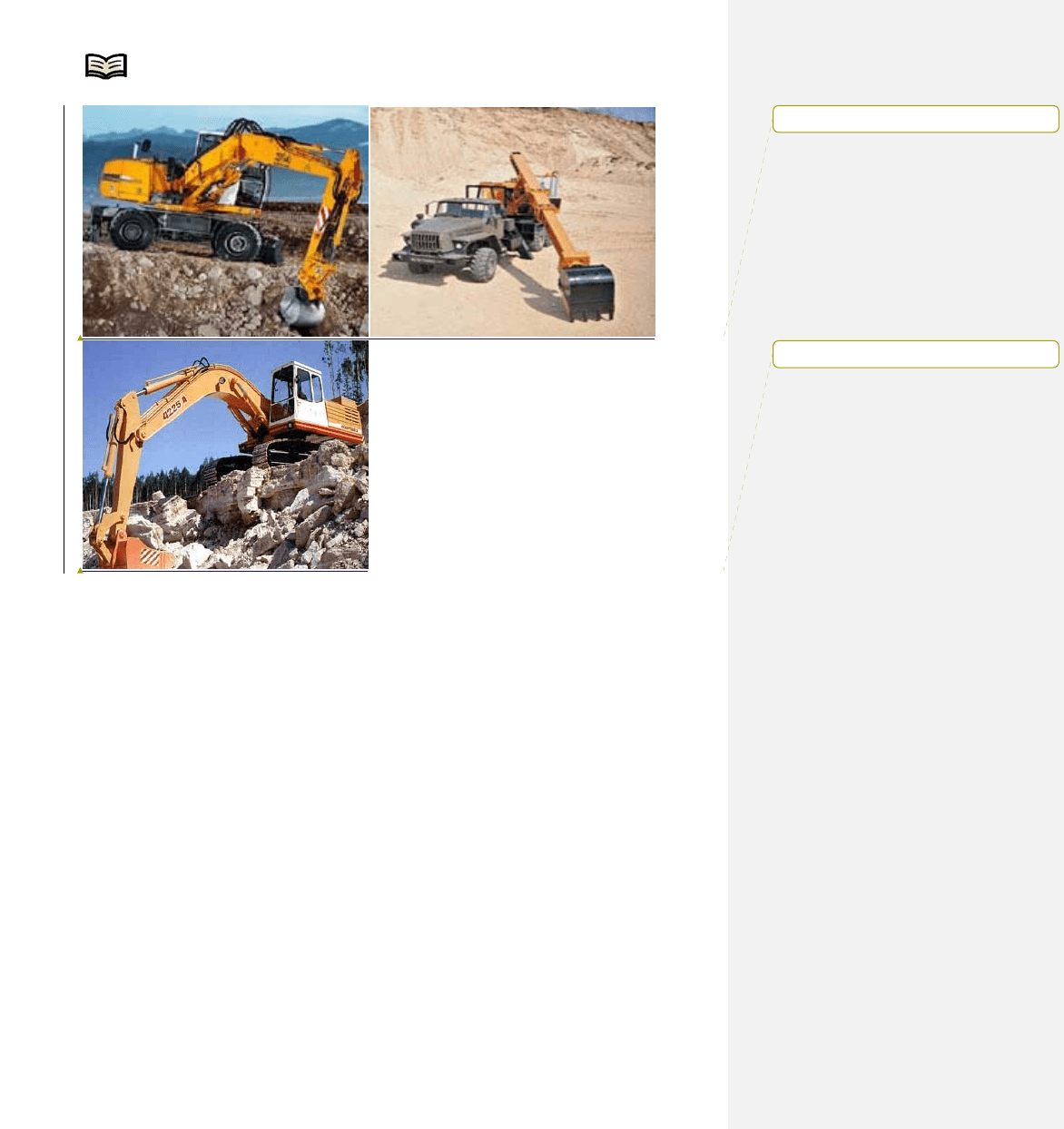
Екскаватори з робочим обладнанням зворотна лопата застосову-
ють при розробці траншей і котлованів з завантаженням транспортних
засобів, або ж у відвал (рис. 2.28).
Рис. 2.26. Екскаватори з робочим
обладнанням зворотна лопата
а – на пневмоколісному ходу; б – на
автомобільному шасі;
в – на гусеничному ходу
а
б
в
Отформатировано: Шрифт: 12 пт
Отформатировано: Шрифт: 12 пт
Організація і технологія будівельних робіт
72
Екскаватори з робочим обладнанням драглайн призначено для роз-
робки ґрунту в каналах, котлованах з вивантаженням його у відвал,
насип чи на транспортні засоби. Такі екскаватори за технічними хара-
ктеристиками мають великий радіус дії і глибину копання.
Екскаватори з робочим обладнанням грейфер застосовують на
обмеженій площі при реконструкції будівель та споруд,
влаштування
колодязів, котлованів під опори, розробленні глибоких (до 20 м) вузь-
ких траншей, зворотному засипанні ґрунту.
Екскаватори можуть бути обладнані стрілою з гаком (як підйомний
кран), трамбувальною плитою для ущільнення ґрунту, дизель-молотом
з клином для розпушування мерзлого ґрунту, дизель-молотом для за-
нурення палів.
Робота одноківшового екскаватора має циклічний характер. Робо
-
чий цикл складається з послідовно виконуваних операцій: копання
ґрунту і наповнення ковша, підйом ковша, поворот стріли навколо осі
до місця вивантаження, вивантаження ґрунту із ковша, поворот стрі-
ли, опускання ковша у вихідне положення для копання ґрунту.
Рис. 2.28. Екскаватори з робо-
чим обладнанням зворотна лопата
а – на пневмоколісному ходу;
б – на автомобільному шасі;
в – на гусеничному ходу
а
б
в
Отформатировано: Шрифт: 12 пт
Отформатировано: Шрифт: 12 пт
Екс
к
знаход
и
Після
з
міщуєт
Пос
л
місця с
т
Роб
о
метра
м
R
ma
x
R
ma
x
R
mі
n
R
ma
x
тор
а
H
m
a
H
ma
x
Ек
ті екск
р
озпіз
н
(
р
ис. 2
.
ти коп
а
к
аватор працює
у
и
ться місце йог
о
з
акінчення копа
н
ься на нову поз
и
л
ідовне перемі
щ
тояння до насту
п
о
та одноківшов
и
м
и:
x
. k
- найбільший
р
x
. к
- найбільший
n
. к
- найменший
р
x
. к
- найбільши
й
а
;
ax
. в
- найбільша
в
x
. к
- найбільша
в
к
скаватори з ро
б
аватора, облад
н
н
ають два види
в
.
30). Висота виб
о
а
ння і не меншо
ю
Організація і тех
н
73
у
вибої. Вибій -
о
стояння, з яко
г
н
ня на одному
м
и
цію.
щ
ення екскавато
р
п
ного називают
ь
и
х екскаваторів
х
р
адіус копання;
радіус копання
н
р
адіус копання
н
й
радіус виванта
ж
в
исота вивантаж
е
в
исота (глибина)
б
очим обладна
н
н
аного прямою
л
в
ибоїв: лобовий
о
ю повинна бут
и
ю
, що забезпечу
є
Рис.
р
ів
р
об
о
та:
R
к
-
р
таже
н
копа
н
R
mіn.с
т
рівні
біль
ш
найб
і
H
к
–
Рис.
2
одно
к
чим
о
R
к
- н
а
найбі
л
стоян
н
менш
и
ня ек
с
та ви
в
сота
(
ша г
л
найбі
л
н
ологія будівельни
х
це робоча зона
г
о розроблюєтьс
я
м
ісці стояння е
к
р
а при розробці
ґ
ь
проходкою.
х
арактеризуєтьс
я
н
а рівні стояння
н
а рівні стояння
е
ж
ення на рівні с
т
е
ння;
копання (вибо
ю
н
ня
м
пряма лоп
а
л
опатою (
р
ис.
2
(торцевий) і б
о
и
не більшою н
а
є
наповнення ко
в
2.29. Схема
р
о
б
одноківшового
о
чим обладнанн
я
р
адіус копання;
R
н
ня; R
max.ст
- на
й
н
ня на рівні стоя
т
- найменший р
а
стояння екскава
т
ш
а висота виван
і
льша глибин
а
н
а
висота підйому к
о
2
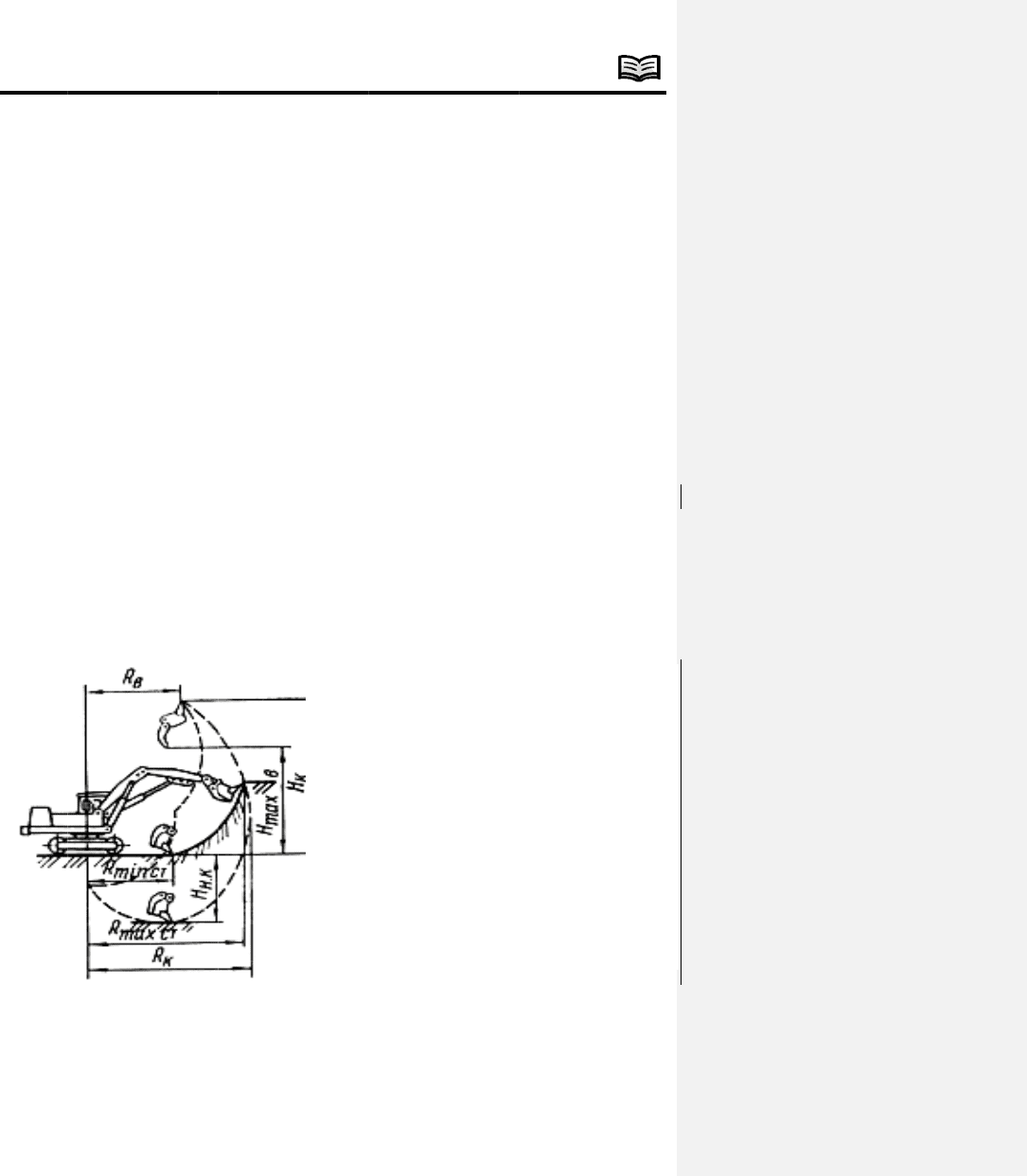
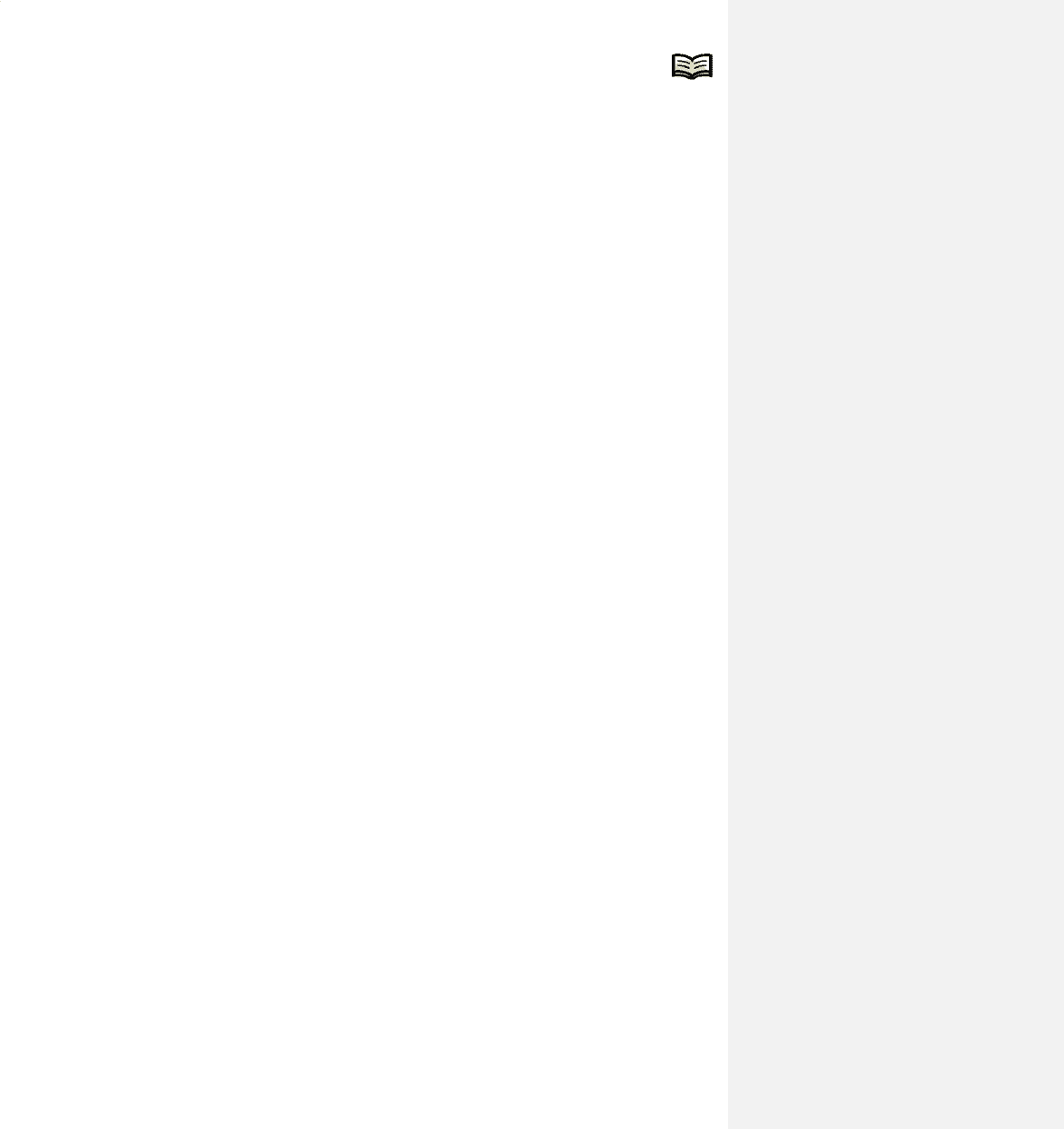
.27. Схема
р
об
о
к
івшового екск
а
о
бладнанням пр
я
а
йбільший радіус
л
ьший радіус к
о
н
я екскаватора;
и
й радіус копанн
я
с
каватора; H
max.в
-
в
антаження; H
max.
к
(
глибина) копанн
я
л
ибин
а
наповнен
л
ьша висота копа
н
х
робіт
екскаватора, де
я
масив ґрунту.
к
скаватор пере-
ґ
рунту з одного
я
такими пара-
екскаватора;
е
кскаватора;
т
ояння екскава-
ю
).
а
та. При робо-
2
.29, табл. 2.6),
о
ковий (бічний)
а
йбільшої висо-
в
ша.
б
очих парамет-
екскаватора з
я
м пряма лопа-
в
- радіус виван-
й
більший радіус
ння екскаватора;
а
діус копання на
т
ора; H
max.в
- най-
таження; H
н.к
–
а
повнення
ковша;
о
вша.
о
чих параметрів
а
ватора з робо-
я
ма лопата:
копання; R
max.ст
-
о
пання на рівні
R
mіn.ст
- най-
я
на рівні стоян-
найбільша висо-
к
- найбільша ви-
я
; H
н.к
– найбіль-
ня
ковша;
H
к
–
н
ня.
Організація і технологія будівельних робіт
74
Таблиця 2.6. Технологічні характеристики одноківшових екскаваторів
з гідравлічним приводом, обладнаних прямою лопатою
Модель
Місткість
ковша,
м
3
H
max к
–
найбільша
висота
копання, м
R
max к
- найбі-
льший радіус
копання, м
H
max в.
- най-
більша висота
вивантаження,
м
ЕО-4121А;
ЕО-4124
1,0;
1,6
7,4
7,4
7,0
7,2
5,0
4,4
ЕО-5122А;
ЕО-5124А
1,6;
2,0
9,65
9,65
7,9 5,1
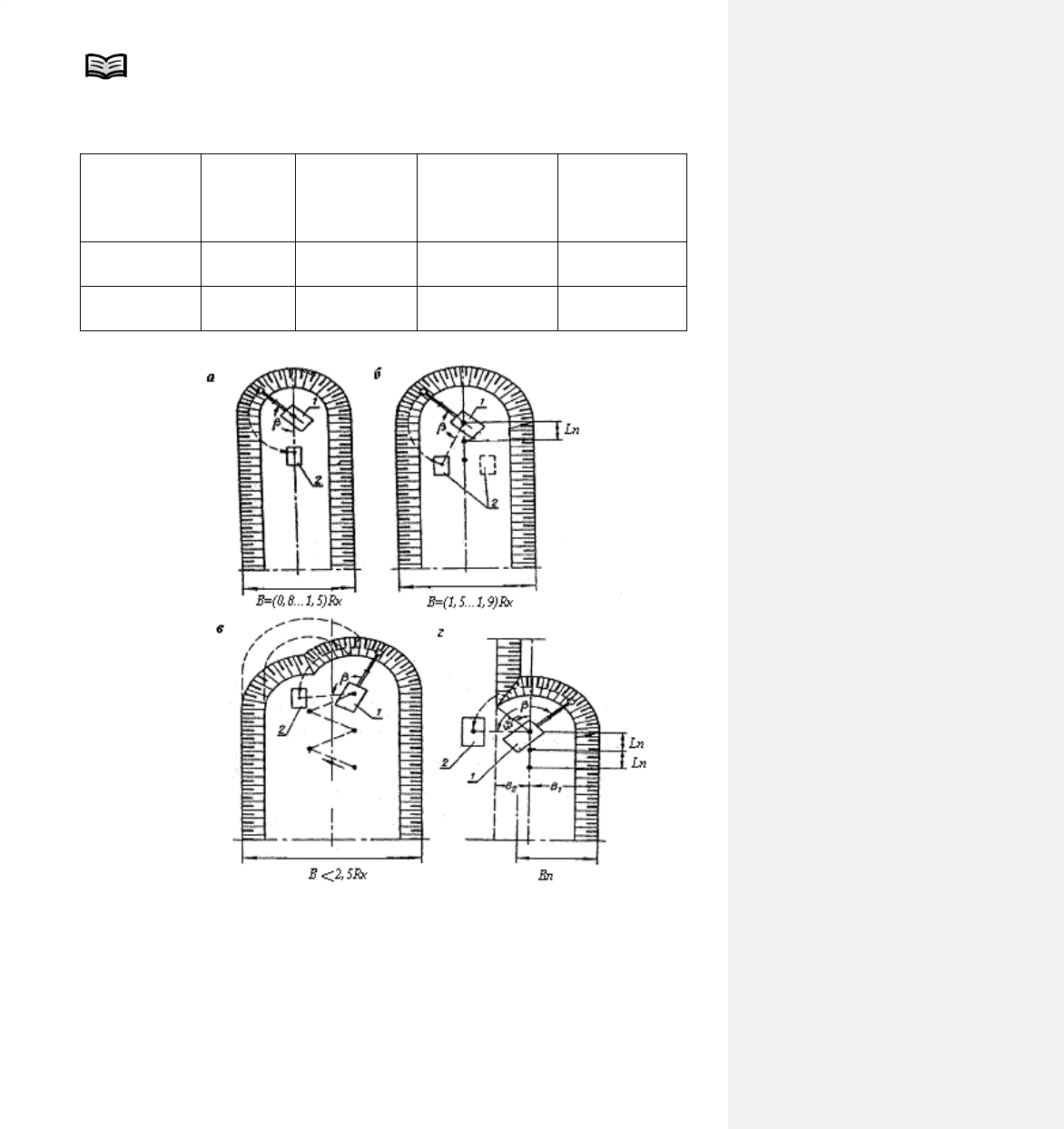
Рис. 2.30. Схеми роботи екскаватора з прямою лопатою за вибоями:
а…в – лобовим (а - при вузькому вибої; б – при вибої нормальної ширини; в –
при розширеному вибої до 2,5R
к
; г – бічним; 1 – екскаватор; 2 – автосамос-
кид.
Організація і технологія будівельних робіт
75
Крок переміщення екскаватора (
п
L
) визначається різницею між
найбільшим і найменшим радіусами копання на рівні стояння екскава-
тора
п
L
= R
max cт
- R
mіn ст ,
(2.22)
де R
max ст
- найбільший радіус копання на рівні стояння екскаватора; R
mіn ст
-
найменший радіус копання на рівні стояння екскаватора;
Лобовими вибоями розроблюють піонерні траншеї, перші проход-
ки та вузькі котловани, ширина котрих не перевищує
В
≤
3,5 R
к
(В - ширина виїмки).
Залежно від проектної ширини виїмки (
В) лобові вибої бувають ву-
зькими і нормальними. Вузький вибій має ширину
В
≤
1,5 R
к
, норма-
льний -
В ≤ (1,5...1,9) R
к
, при цьому екскаватор розробляє виїмку, ру-
хаючись по її осі. Якщо ширина виїмки
В
≥
2 R
к
, то екскаватор роз-
роблює ґрунт розширеним вибоєм, але за різними схемами перемі-
щення. При
В = (2,0...2,5) R
к
екскаватор рухається у виїмці зигзагом, а
при
В = (2,5...3,5) R
к
- поперек виїмки.
Бічний вибій використовується при значних розмірах виїмки
В ≥
3,5 R
к
. При такому вибої покращуються умови руху транспортних за-
собів для завантаження. Розробка виїмки починається з влаштування
піонерної траншеї лобовим вибоєм, а наступне розроблення викону-
ється бічними вибоями.
При виборі схеми роботи екскаватора перевага віддається розробці
ґрунту лобовими вибоями, тому що при розробці бічними вибоями
ширина виїмки завжди менша ніж при
лобовому, і не перевищує одно-
го радіуса копання, при цьому екскаватор розробляє ґрунт у положен-
ні найменшої стійкості, що є небезпечно.
Мінімальна висота вибою, що забезпечує наповнення ковша екска-
ватора ґрунтом, має бути не меншою трикратної висоти ковша, а мак-
симальна – не більшою максимальної висоти копання екскаватором.
Екскаватори з робочим обладнанням зворотна лопата.
Екскава-
тори, що оснащено зворотною лопатою, застосовують при розробці
траншей і котлованів із завантаженням транспортних засобів або ж у
відвал (рис. 2.31, табл. 2.7).
Табли
ц
з гідра
в
Моде
л
ЕО-33
2
ЕО-31
2
ЕО-43
2
ЕО-41
2
ЕО-41
2
ЕО-51
2
Організація і тех
н
ц
я 2.7. Технологі
в
лічним привод
о
л
ь
Місткість
ковша, м
3
H
г
2
2Б 0,4; 0,5;
0,63
2
1Б 0,5
2
1А 0,3
0,8
1,0
2
1А 0,65
1,0
2
4 0,65
1,0
2
2А 1,25
н
ологія будівельни
х
76
чні характерист
и
о
м, обладнаних з
в
H
max к
–
найбільша
г
либина
копання, м
R
ma
x
най
б
раді
м
5,0
4,3
4,5
6,7
5,5
5,5
7,1
5,8
7,1
5,8
6,2
Рис.
2
р
ів
о
р
обо
ч
лопа
т
R
к
- р
а
тажен
н
женн
я
Рис.
2
метрі
в
тора
зворо
т
R
к
- н
а
- раді
у
найбі
л
- найб
х
робіт
и
ки одноківшов
и
в
оротною лопат
о
x
к
–
б
ільший
ус копання,
H
m
a
най
та
в
ня,
м
8,2
7,5
7,3
10,2
9,9
9,9
10,2
9,0
10,2
9,0
10,0
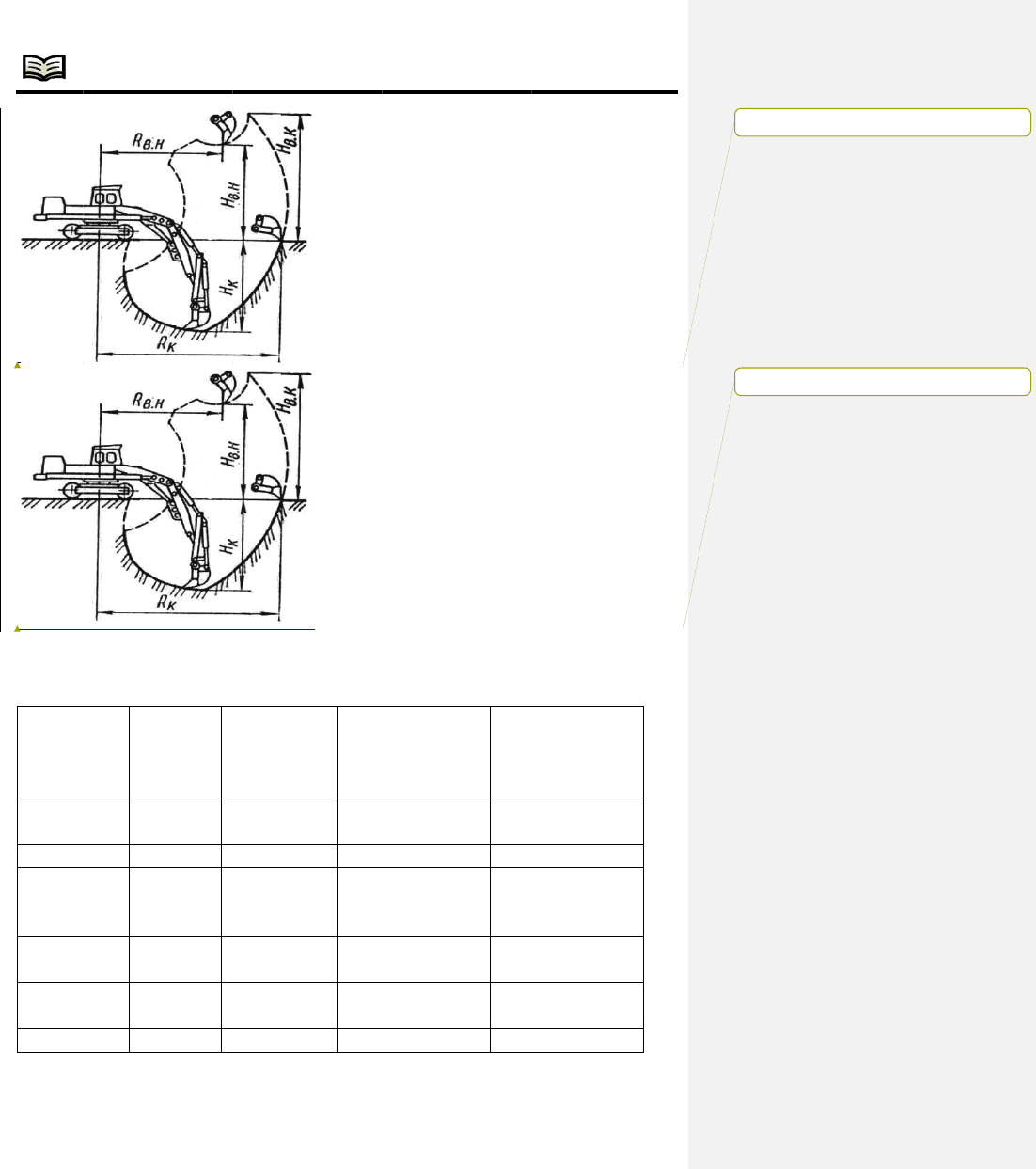
2
.31. Схеми роб
о
о
дноківшового
е
ч
им обладнанн
я
т
а:
а
діус копання;
R
в.к
н
я ковша;
H
в.к
-
в
;
H
к
- глибина ко
п
2
.29. Схеми ро
б
в
одноківшово
г
з робочим о
б
т
на лопата:
а
йбільший радіус
к
у
с вивантаження
к
л
ьша висота вива
н
і
льша глибина ко
п
и
х екскаваторів
о
ю
a
x в
–
більша висо-
в
ивантажен-
м
5,2
4,8
3,9
6,2
5,6
5,6
5,2
5,0
5,2
5,0
5,3
о
чих парамет-
е
кскаватора з
я
м зворотна
- радіус виван-
в
исота виванта-
п
ання.
б
очих пара-
г
о екскава-
б
ладнанням
к
опання;
R
в.к
к
овша;
H
в.к
-
н
таження;
H
к
п
ання.
Отформат
и
Отформат
и
и
ровано: Шрифт: 1
и
ровано: Шрифт: 1
1 пт
1 пт

Організація і технологія будівельних робіт
77
Розробка ґрунту виконується лобовим та бічним вибоями.
Лобовим вибоєм екскаватор розроблює ґрунт “на себе” нижче рів-
ня свого стояння, рухаючись вздовж осі котловану чи траншеї
(рис. 2.32), і послідовно опускає ківш для набирання ґрунту то в одну
то в другу сторону від осі
(В
≤
R
к
). Ця обставина важлива у тих випа-
дках, коли ґрунти мокрі або розроблення ведеться із-під води.
Рис. 2.32. Схеми розробки виїмок екскаватором, обладнаним зворот-
ною лопатою:
а – траншеї; б – каналу
Широкі виїмки можуть розроблюватись паралельно - торцевими
проходами при
В
≥
1,7 R
к
або зигзагом при В =(3...3,5) R
к
,
при цьому
ширина вибою
В
в
визначається за виразом
.
max
2
п
2
кв
LRB −= (2.23)
де R
max к
- найбільший радіус копання;
п
L
- крок переміщення екскаватора.
Екскаватори з робочим обладнанням драглайн. Екскаватори, що
оснащено ковшами-драглайнами, розробляють ґрунти нижче рівня
свого стояння (рис. 2.33, табл. 2.8).
Таблиця 2.8. Технологічні характеристики одноківшових екскаваторів,
обладнаних драглайнами
Моде
л
ЕО-33
1
ЕО-41
1
Е-1001
Е-1251
Це
д
нього ї
х
20 м, а
ґрунту
човник
чому а
в
Організація і тех
н
л
ь
Місткість
ковша, м
3
H
н
г
л
к
1
1Г 0,4;
1
1В 0,8
1
1Е 1,0
1
Б 1,25
д
озволяє розроб
л
х
осушення або
найбільший ра
д
в транспорт
н
ова і поздовжн
в
тосамоскиди за
ї
н
ологія будівельни
х
78
H
max к
–
н
айбільша
л
ибина
к
опання, м
R
max к
найбі
л
копа
н
7,6
7,3
9,4
9,8
л
яти мокрі і во
д
з-під води. Гли
б
д
іус на рівні сто
я
н
і засоби най
е
ьо-човникова с
х
ї
жджають у виї
м
х
робіт
–
л
ьший радіу
с
н
ня, м
H
m
a
най
та
в
ня,
м
10,0
10,0
12,2
12,4
д
онасичені ґрун
т
б
ина копання м
о
я
ння - 26 м. Пр
и
е
фективнішими
х
еми роботи е
к
м
ку (рис. 2.34).
Рис. 2.31. Схе
параметрів од
н
екскаватора з
р
ладнанням дра
г
R
р
- найбільший
ня;
R
max.n
– найб
і
набору ковша
глибині;
R
mіn.n
-
радіус набору к
о
даній глибині;
R
вантаження ков
ш
льша
висота вив
а
- найбільша гли
б
l
n
– довжина наб
о
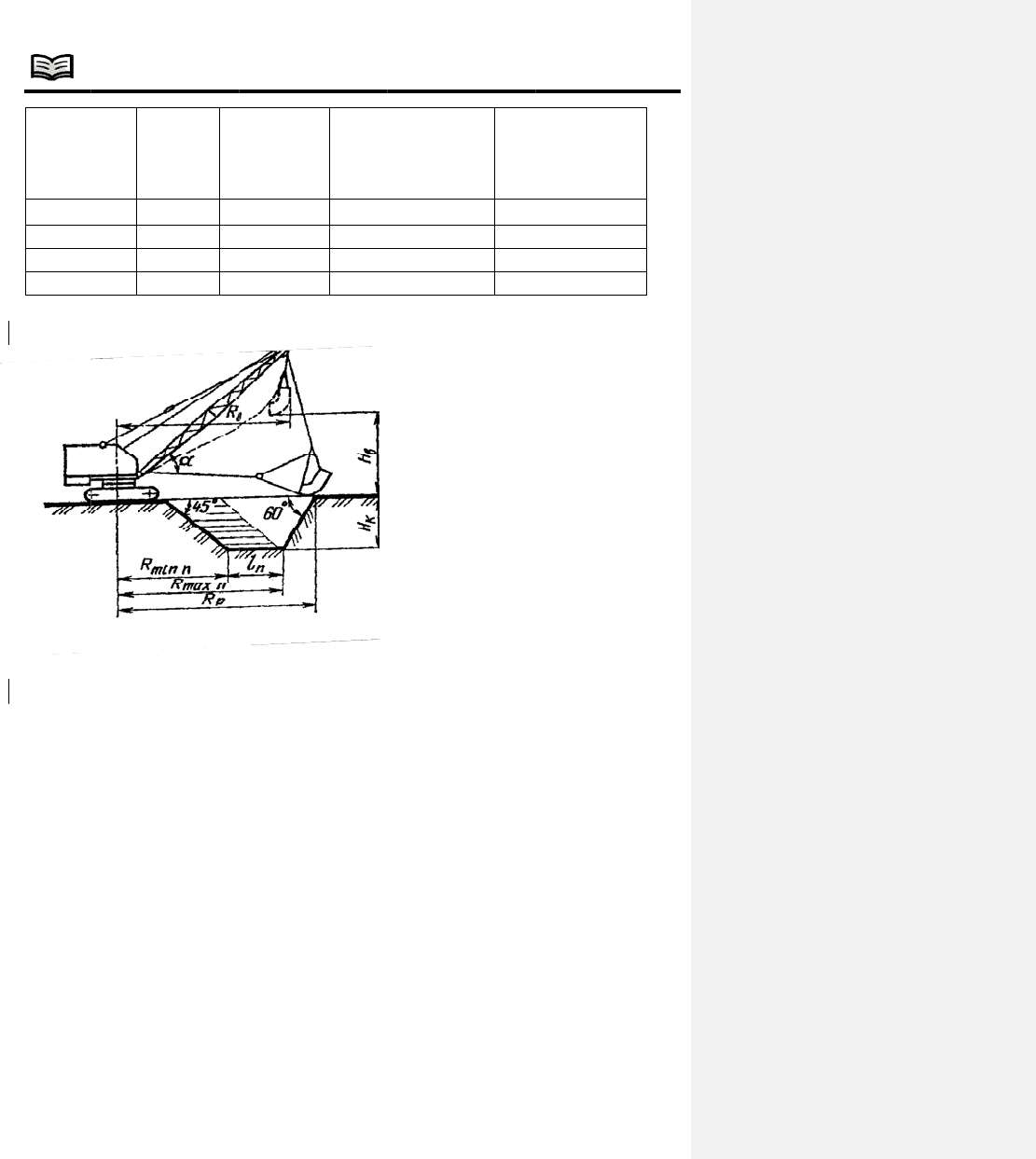
Рис. 2.33. Схе
параметрів од
н
екскаватора
з
обладнанням д
р
R
к
- радіус коп
а
найбільший раді
у
вша при зада
н
R
mіn.n
- найменш
и
бору ковша при
бині;
R
в
- радіус
в
ковша;
H
в
- ви
с
ження;
H
к
- гли
б
l
n
– довжина наб
о
a
x в
–
більша висо-
в
ивантажен-
м
6,3
5,5
6,6
6,5
т
и без поперед-
о
же досягати до
и
розвантаженні
є поперечно-
к
скаватора, при
ми робочих
н
оківшового
р
обочим об-
г
лайн:
радіус копан-
і
льший радіус
при заданій
-
найменший
о
вша при за-
в
- радіус ви-
ш
а;
H
в
- найбі-
а
нтаження;
H
к
б
ина копання;
о
ру ковша
ми робочих
н
оківшового
з
робочим
р
аглайн:
а
ння;
R
max.n
–
у
с набору ко-
н
ій глибині;
и
й радіус на-
заданій гли-
в
ивантаження
с
ота виванта-
б
ина копання;
о
ру ковша
Організація і технологія будівельних робіт
79
Таблиц.8. Технологічні характеристики одноківшових екскаватор
Розробка виїмок одноківшовими екскаваторами, обладнаними дра-
глайнами, ефективно може виконуватись як лобовим
, так і боковим
вибоями (рис. 2.35), при цьому ґрунт може розвантажуватись у відвал,
насип чи на транспорт.
Розробка виїмок лобовим вибоєм виконується при русі екскаватора
вздовж осі виїмки, а бічним вибоєм - при русі екскаватора паралельно
осі виїмки. У першому випадку розроблений ґрунт може вкладатися в
кавальєри з однієї або з двох сторін виїмки, у
другому – тільки з однієї
сторони виїмки. При великих розмірах виїмки застосовують комбіно-
вані способи розробки за декілька проходів екскаватора.
Перший прохід виконується лобовим вибоєм з відсипанням ґрунту
в проміжний тимчасовий кавальєр, який перекидають цим же екскава-
тором (або переміщують бульдозером) в постійну частину кавальєру.
Подальше розроблення виїмки до проектних розмірів
виконується бі-
чним вибоєм.
Рис. 2.34. Розробка котловану екскаватором з робочим обладнанням
драглайн із вантаженням ґрунту в транспортні засоби
Рис. 2.32. Розробка котловану екскаватором з робочим обладнанням
драглайн із розвантаженням ґрунту в транспортні засоби
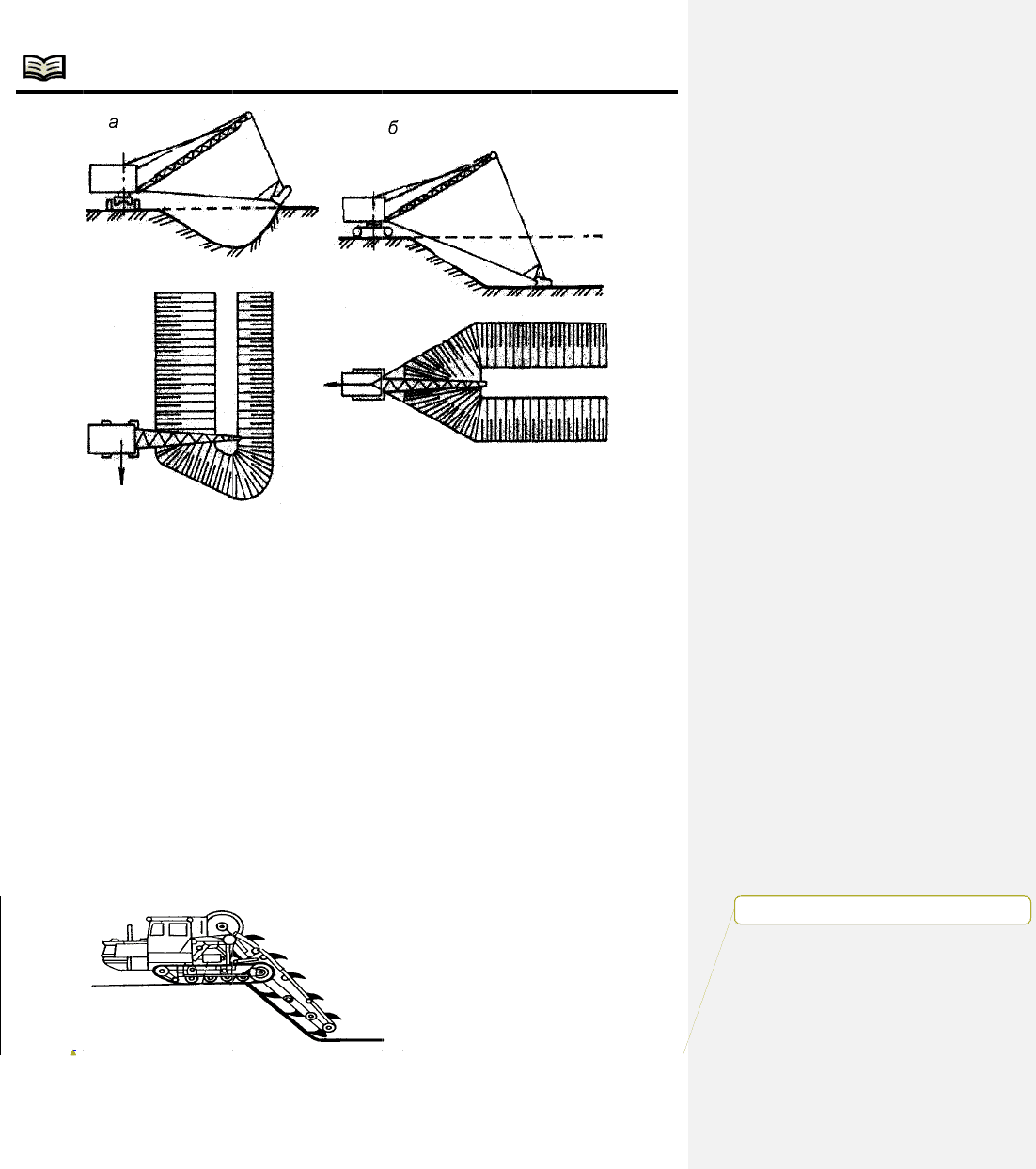
Рис. 2.
3
наним
д
а
– бок
о
При
оснащ
у
ґрунт б
Роз
р
Баг
а
говим
ч
Екс
к
ні кана
л
дамент
и
Організація і тех
н
3
5. Схеми розро
б
д
раглайном:
о
вим вибоєм;
б
–
л
плануванні у
к
у
ється ковшем
з
б
оковим вибоєм.
р
обка ґрунту ба
г
а
токівшеві екска
ч
и роторним ро
б
к
аватори повздо
в
л
ів, кюветів, тр
а
и
т
ощо (рис. 2.3
6
н
ологія будівельни
х
80
б
ки виїмок одно
л
обовим вибоєм
к
осів каналів, к
з
суцільною рі
ж
г
атоківшевими
ватори - це ма
ш
б
очими органам
и
в
жнього копанн
я
а
ншей під інжен
е
6
).
Рис. 2
екска
в
х
робіт
к
івшовим екска
в
отлованів, нас
и
ж
учою кромкою
,
екскаваторам
и
ш
ини безперервн
о
и
.
я
застосовують
п
е
рні комунікації
,
.34. Схема багат
в
ато
р
а
в
атором, облад-
и
пів екскаватор
,
розроблюючи
и
.
о
ї дії із ланцю-
п
ри влаштуван-
,
стрічкові фун-
оківшевого
Отформат
и
и
ровано: Шрифт: 1
1 пт