Baumgarte T., Shapiro S. Numerical Relativity. Solving Einstein’s Equations on the Computer
Подождите немного. Документ загружается.

2.3 Foliations of spacetime 31
Thus γ
ab
is a projection tensor that projects out all geometric objects lying along n
a
.
This metric allows us to compute distances within a slice . To see that γ
ab
is purely
spatial, i.e., resides entirely in with no piece along n
a
, we contract it with the
normal n
a
,
n
a
γ
ab
= n
a
g
ab
+ n
a
n
a
n
b
= n
b
− n
b
= 0. (2.28)
Intuitively, γ
ab
calculates the spacetime distance with g
ab
and then kills off the timelike
contribution (normal to the spatial surface) with n
a
n
b
. The inverse spatial metric can be
found by raising the indices of γ
ab
with g
ab
,
γ
ab
= g
ac
g
bd
γ
cd
= g
ab
+ n
a
n
b
. (2.29)
Next we break up 4-dimensional tensors by decomposing them into a purely spatial
part, which lies in the hypersurfaces , and a timelike part, which is normal to the spatial
surface. To do so, we need two projection operators. The first one, which projects a 4-
dimensional tensor into a spatial slice, can be found by raising only one index of the spatial
metric γ
ab
γ
a
b
= g
a
b
+ n
a
n
b
= δ
a
b
+ n
a
n
b
. (2.30)
Exercise 2.6 Show that γ
a
b
v
b
,wherev
a
is an arbitrary spacetime vector, is purely
spatial.
To project higher rank tensors into the spatial surface, each free index has to be contracted
with a projection operator. It is sometimes convenient to denote this projection with a
symbol ⊥, e.g.,
⊥ T
ab
= γ
c
a
γ
d
b
T
cd
. (2.31)
Similarly, we may define the normal projection operator as
N
a
b
≡−n
a
n
b
= δ
a
b
− γ
a
b
, (2.32)
even though in most cases it is just as easy to write out the normal vectors n
a
n
b
.We
can now use these two projection operators to decompose any tensor into its spatial and
timelike parts. For example, we can write an arbitrary vector v
a
as
v
a
= δ
a
b
v
b
= (γ
a
b
+ N
a
b
)v
b
=⊥ v
a
− n
a
n
b
v
b
. (2.33)
Exercise 2.7 Show that for the second rank tensor T
ab
we have
T
ab
=⊥ T
ab
− n
a
n
c
⊥ T
cb
− n
b
n
c
⊥ T
ac
+ n
a
n
b
n
c
n
d
T
cd
. (2.34)
Exercise 2.7 illustrates that the ⊥ symbol has to be used with some care, since it applies
only to the free indices of the tensor that it operates on. To avoid confusion, we will usually
write out the projection operators explicitly.
32 Chapter 2 The 3+1 decompostion of Einstein’s equations
It may be useful to illustrate the above concepts for a familiar example. Consider a
Schwarzschild spacetime in isotropic spherical polar coordinates
7
ds
2
=−
1 − M/(2r)
1 + M/(2r)
2
dt
2
+
1 +
M
2r
4
(dr
2
+r
2
dθ
2
+r
2
sin
2
θdφ
2
) (2.35)
and identify the spatial slices with hypersurfaces of constant coordinate time t. Then
the components of the 1-form
a
in a coordinate basis are simply
a
= (1, 0, 0, 0) (2.36)
and from its normalization (2.21)wefindthelapse
α =
1 − M/(2r)
1 + M/(2r)
. (2.37)
The normal vector n
a
is then
n
a
=−g
ab
ω
b
=
1 + M/(2r)
1 − M/(2r)
(1, 0, 0, 0), (2.38)
and the spatial metric (2.27) becomes
γ
ab
=
1 +
M
2r
4
diag
0, 1, r
2
, r
2
sin
2
θ
. (2.39)
It is evident that this metric eliminates any t-components.
Returning to our formal derivation of the 3 + 1 decomposition we will also need a
3-dimensional covariant derivative that maps spatial tensors into spatial tensors. It is
uniquely defined by requiring that it be compatible with the 3-dimensional metric γ
ab
.We
can construct this derivative by projecting all indices present in a 4-dimensional covariant
derivative into . For a scalar f , for example, we define
D
a
f ≡ γ
b
a
∇
b
f, (2.40)
and for a rank (
1
1
)tensorT
a
b
D
a
T
b
c
≡ γ
d
a
γ
b
e
γ
f
c
∇
d
T
e
f
. (2.41)
The extension to other type tensors is obvious.
Exercise 2.8 Show that the 3-dimensional covariant derivative is compatible with
the spatial metric γ
ab
, that is, show that
D
a
γ
bc
= 0. (2.42)
Exercise 2.9 Show that for a scalar product v
a
w
a
, the Leibnitz rule
D
a
(v
b
w
b
) = v
b
D
a
w
b
+ w
b
D
a
v
b
(2.43)
holds only if v
a
and w
a
are purely spatial.
7
See, e.g., Misner et al. (1973), equation (31.22).
2.4 The extrinsic curvature 33
δn
a
δn
a
∝−K
ab
n
a
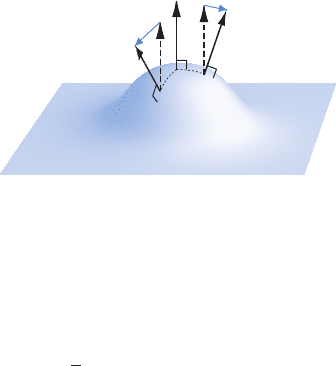
Figure 2.2 The extrinsic curvature of a hypersurface in an enveloping spacetime measures how much normal
vectors to the hypersurface differ at neighboring points. It therefore measures the rate at which the hypersurface
warps as it is carried forward along a normal vector.
The 3-dimensional covariant derivative can be expressed in terms of 3-dimensional
connection coefficients, which, in a coordinate basis, are given by
a
bc
=
1
2
γ
ad
(∂
c
γ
db
+ ∂
b
γ
dc
− ∂
d
γ
bc
). (2.44)
The 3-dimensional Riemann tensor associated with γ
ij
is defined by requiring that
8
2D
[a
D
b]
w
c
= R
d
cba
w
d
R
d
cba
n
d
= 0 (2.45)
for any spatial vector w
d
. In a coordinate basis, the components of the Riemann tensor can
be computed from
R
d
abc
= ∂
b
d
ac
− ∂
a
d
bc
+
e
ac
d
eb
−
e
bc
d
ea
. (2.46)
Contracting the Riemann tensor yields the 3-dimensional Ricci tensor R
ab
= R
c
acb
and the
3-dimensional Ricci scalar R = R
a
a
.
Einstein’s equations (1.32) relate contractions of the 4-dimensional Riemann tensor
(4)
R
a
bcd
to the stress–energy tensor. Since we want to rewrite these equations in terms of
3-dimensional objects, we decompose
(4)
R
a
bcd
into spatial tensors. Not surprisingly, this
decomposition involves its 3-dimensional cousin R
a
bcd
, but obviously this cannot contain
all the information needed. R
d
abc
is a purely spatial object and can be computed from spatial
derivatives of the spatial metric alone, while
(4)
R
d
abc
is a spacetime creature which also
contains time derivatives of the 4-dimensional metric. Stated differently, the 3-dimensional
curvature R
a
bcd
only contains information about the curvature intrinsic to a slice ,butit
gives no information about what shape this slice takes in the spacetime M in which it is
embedded. This information is contained in a tensor called the extrinsic curvature.
2.4 The extrinsic curvature
The extrinsic curvature K
ab
can be found by projecting gradients of the normal vector
into the slice (see Figure 2.2). We will also see that the extrinsic curvature is related to
8
See equation (1.20) for the 4-dimensional analog of this expression.

34 Chapter 2 The 3+1 decompostion of Einstein’s equations
the first time derivative of the spatial metric γ
ab
. The metric and the extrinsic curvature
(γ
ab
, K
ab
) can therefore be considered as the equivalent of positions and velocities in
classical mechanics – they measure the “instantaneous” state of the gravitational field,
and form the fundamental variables in our initial value formulation. Mathematicians often
refer to the metric as the first, and the extrinsic curvature the second, fundamental form.
The projection of the gradient of the normal vector γ
c
a
γ
d
b
∇
c
n
d
can be split into a
symmetric part, also known as the expansion tensor
θ
ab
= γ
c
a
γ
d
b
∇
(c
n
d)
, (2.47)
and an antisymmetric part, also known as the rotation 2-form or twist,
ω
ab
= γ
c
a
γ
d
b
∇
[c
n
d]
. (2.48)
Exercise 2.10 Show that the twist ω
ab
has to vanish as a consequence of n
a
being
rotation-free (see exercise 2.5).
We now define the extrinsic curvature, K
ab
, as the negative expansion
K
ab
≡−γ
c
a
γ
d
b
∇
(c
n
d)
=−γ
c
a
γ
d
b
∇
c
n
d
. (2.49)
By definition, the extrinsic curvature is symmetric and purely spatial. It measures the
gradient of the normal vectors n
a
. Since the latter are normalized, they can only differ
in the direction in which they are pointing, and the extrinsic curvature therefore provides
information on how much this direction changes from point to point across a spatial hyper-
surface, as illustrated in Figure 2.2. As a consequence, the extrinsic curvature measures
the rate at which the hypersurface deforms as it is carried forward along a normal.
Exercise 2.11 Show that the extrinsic curvature of t = constant hypersurfaces of
the Schwarzschild metric (2.35)vanishes.
Alternatively, we can express the extrinsic curvature in terms of the acceleration of the
unit normal vector field
a
a
≡ n
b
∇
b
n
a
. (2.50)
Exercise 2.12 Show that the acceleration a
a
is purely spatial, n
a
a
a
= 0.
Exercise 2.13 Show that the acceleration a
a
is related to the lapse α according to
a
a
= D
a
ln α. (2.51)
Exercise 2.14 Find the acceleration a
a
for the normal observer (2.38) in a Schwarz-
schild spacetime.
Expanding the right hand side of (2.49) and using the identity n
d
∇
c
n
d
= 0 together with
the definition of a
b
we find
K
ab
=−γ
c
a
γ
d
b
∇
c
n
d
=−(δ
c
a
+ n
a
n
c
)(δ
d
b
+ n
b
n
d
)∇
c
n
d
=−(δ
c
a
+ n
a
n
c
)δ
d
b
∇
c
n
d
=−∇
a
n
b
− n
a
a
b
. (2.52)

2.4 The extrinsic curvature 35
Finally, we can write the extrinsic curvature as
K
ab
=−
1
2
L
n
γ
ab
, (2.53)
where
L
n
denotes the Lie derivative along n
a
. The concept and properties of the Lie
derivative are sketched in Apppendix A. Here we simply note that the Lie derivative along
a vector field X
a
measures by how much the changes in a tensor field along X
a
differ from
a mere infinitesimal coordinate transformation generated by X
a
. For a scalar f , the Lie
derivative reduces to the partial derivative
L
X
f = X
b
D
b
f = X
b
∂
b
f ; (2.54)
for a vector field v
a
the Lie derivative is the commutator, so that in a coordinate basis,
L
X
v
a
= X
b
∂
b
v
a
− v
b
∂
b
X
a
= [X,v]
a
, (2.55)
and for a 1-form ω
a
the Lie derivative is given by
L
X
ω
a
= X
b
∂
b
ω
a
+ ω
b
∂
a
X
b
. (2.56)
It then follows that for a tensor T
a
b
of rank (
1
1
) the Lie derivative is
L
X
T
a
b
= X
c
∂
c
T
a
b
− T
c
b
∂
c
X
a
+ T
a
c
∂
b
X
c
. (2.57)
Generalization to tensors of arbitrary rank follows naturally. Lie differentiation satisfies
the chain rule and the usual addition properties obeyed by covariant differentiation. Also,
in all of the above expressions for the Lie derivative one may replace the partial derivatives
with covariant derivatives.
Since n
a
is a timelike vector, equation (2.53) illustrates the intuitive interpretation of
the extrinsic curvature as a geometric generalization of the “time derivative” of the spatial
metric γ
ab
. Obviously, the spatial metric γ
ab
on two different slices may differ by virtue of
a coordinate transformation. Equation (2.53) states that, in addition to a mere coordinate
transformation (which by itself would yield
L
n
γ
ab
= 0, see Appendix A), γ
ab
changes
proportionally to K
ab
.
To derive equation (2.53), we write γ
ab
in terms of g
ab
and n
a
and use (A.13) and (A.19):
L
n
γ
ab
= L
n
(g
ab
+ n
a
n
b
) = 2∇
(a
n
b)
+ n
a
L
n
n
b
+ n
b
L
n
n
a
= 2(∇
(a
n
b)
+ n
(a
a
b)
) =−2K
ab
. (2.58)
The last equality results from equation (2.52). The extrinsic curvature is often defined
by equation (2.53), from which our definition (2.49)aswellas(2.52) can be derived.
Obviously, this logical development is completely equivalent and the choice is merely a
matter of taste.
The trace of the extrinsic curvature, often called the mean curvature,
K = g
ab
K
ab
= γ
ab
K
ab
, (2.59)

36 Chapter 2 The 3+1 decompostion of Einstein’s equations
also has a nice geometrical interpretation. To see this, we take the trace of (2.53)tofind
K = γ
ab
K
ab
=−
1
2
γ
ab
L
n
γ
ab
=−
1
2γ
L
n
γ =−
1
γ
1/2
L
n
γ
1/2
=−L
n
ln γ
1/2
. (2.60)
Since γ
1/2
d
3
x is the proper volume element in the spatial slice , the negative of the mean
curvature measures the fractional change in the proper 3-volume along n
a
.
9
2.5 The equations of Gauss, Codazzi and Ricci
The metric γ
ab
and the extrinsic curvature K
ab
cannot be chosen arbitrarily. Instead, they
have to satisfy certain constraints, so that the spatial slices “fit” into the spacetime M.In
order to find these relations, we have to relate the 3-dimensional Riemann tensor R
a
bcd
of the hypersurfaces to the 4-dimensional Riemann tensor
(4)
R
a
bcd
of M.Todoso,
we first take a completely spatial projection of
(4)
R
a
bcd
, then a projection with one index
projected in the normal direction, and finally a projection with two indices projected in
the normal direction. All other projections vanish identically because of the symmetries of
the Riemann tensor. A decomposition of
(4)
R
a
bcd
into spatial and normal pieces therefore
involves these three different types of projections.
Exercise 2.15 Following the example of exercise 2.7, show that the 4-dimensional
Riemann tensor
(4)
R
abcd
can be written as
(4)
R
abcd
= γ
p
a
γ
q
b
γ
r
c
γ
s
d
(4)
R
pqrs
− 2γ
p
a
γ
q
b
γ
r
[c
n
d]
n
s (4)
R
pqrs
−2γ
p
c
γ
q
d
γ
r
[a
n
b]
n
s (4)
R
pqrs
+ 2γ
p
a
γ
r
[c
n
d]
n
b
n
q
n
s (4)
R
pqrs
−2γ
p
b
γ
r
[c
n
d]
n
a
n
q
n
s (4)
R
pqrs
. (2.61)
The above projections give rise to the equations of Gauss, Codazzi and Ricci, which we
will derive below. Given that
(4)
R
a
bcd
involves up to second time derivatives of the metric,
while R
a
bcd
only contains space derivatives, we may already anticipate that these relations
will involve the extrinsic curvature and its time derivative.
The Riemann tensor is defined in terms of second covariant derivatives of a vector. To
relate the 4-dimensional Riemann tensor to its 3-dimensional counterpart, it is therefore
natural to start by relating the corresponding covariant derivatives to each other. We first
expand the definition of the spatial gradient of a spatial vector V
b
as
D
a
V
b
= γ
p
a
γ
b
q
∇
p
V
q
= γ
p
a
(g
b
q
+ n
q
n
b
)∇
p
V
q
= γ
p
a
∇
p
V
b
− γ
p
a
n
b
V
q
∇
p
n
q
= γ
p
a
∇
p
V
b
− n
b
V
e
γ
p
a
γ
q
e
∇
p
n
q
= γ
p
a
∇
p
V
b
+ n
b
V
e
K
ae
, (2.62)
wherewehaveusedn
q
V
q
= 0, and hence n
q
∇
p
V
q
=−V
q
∇
p
n
q
, as well the definition of
the extrinsic curvature (2.49).
9
See also Poisson (2004), Section 2.3.8. Alternatively, from equation (2.49)or(4.7)wehavethatK =−∇
a
n
a
=
−(1/V )dV/dτ , hence K measures the expansion of normal observers, or the fractional rate of change, with respect to
proper time τ , of the proper volume V of a bundle of normal observers; see, e.g., Misner et al. (1973), equation (22.2).

2.5 The equations of Gauss, Codazzi and Ricci 37
Exercise 2.16 Show that
∇
a
V
a
=
1
α
D
a
(αV
a
) (2.63)
for any spatial vector V
a
.
Hint: One possible derivation uses equations (2.51)and(2.62); a more elegant
approach starts with the identity (A.44).
Exercise 2.17 Show that
D
a
D
b
V
c
= γ
p
a
γ
q
b
γ
c
r
∇
p
∇
q
V
r
− K
ab
γ
c
r
n
p
∇
p
V
r
− K
c
a
K
bp
V
p
. (2.64)
We can now use equation (2.64) to relate the 3- and 4-dimensional Riemann tensors to
each other. Writing the definition of the 3-dimensional Riemann tensor (2.45)as
R
dc
ba
V
d
= 2D
[a
D
b]
V
c
(2.65)
we can insert the second derivative (2.64)tofind
R
dc
ba
V
d
= 2γ
p
a
γ
q
b
γ
c
r
∇
[p
∇
q]
V
r
− 2K
[ab]
γ
c
r
n
p
∇
p
V
r
− 2K
c
[a
K
b] p
V
p
. (2.66)
The second term on the right hand side vanishes because K
ab
is symmetric, and the first
term can be rewritten in terms of the 4-dimensional Riemann tensor, which yields
R
dcba
V
d
= γ
p
a
γ
q
b
γ
r
c
(4)
R
drqp
V
d
− 2K
c[a
K
b]d
V
d
(2.67)
after relabeling some indices and lowering the index c. Since this relation has to hold for
any arbitrary spatial vector V
d
,wehave
R
abcd
+ K
ac
K
bd
− K
ad
K
cb
= γ
p
a
γ
q
b
γ
r
c
γ
s
d
(4)
R
pqrs
. (2.68)
This equation is called Gauss’ equation. It relates the full spatial projection of
(4)
R
a
bcd
to
the 3-dimensional R
a
bcd
and terms quadradic in the extrinsic curvature.
Next, we want to consider projections of
(4)
R
a
bcd
with one index projected in the normal
direction. This will involve a spatial derivative of the extrinsic curvature
D
a
K
bc
= γ
p
a
γ
q
b
γ
r
c
∇
p
K
qr
=−γ
p
a
γ
q
b
γ
r
c
(∇
p
∇
q
n
r
+∇
p
(n
q
a
r
)). (2.69)
Since γ
q
b
n
q
= 0, only the gradient of n
q
will give a nonzero contribution in the second
term, namely
γ
p
a
γ
q
b
γ
r
c
a
r
∇
p
n
q
=−a
c
K
ab
. (2.70)
We therefore have
D
a
K
bc
=−γ
p
a
γ
q
b
γ
r
c
∇
p
∇
q
n
r
+ a
c
K
ab
. (2.71)
Since K
ab
is symmetric, the last term disappears when antisymmetrizing to give
D
[a
K
b]c
=−γ
p
a
γ
q
b
γ
r
c
∇
[p
∇
q]
n
r
. (2.72)

38 Chapter 2 The 3+1 decompostion of Einstein’s equations
By the definition of the Riemann tensor, this can be rewritten as
D
b
K
ac
− D
a
K
bc
= γ
p
a
γ
q
b
γ
r
c
n
s (4)
R
pqrs
. (2.73)
This equation is known as the Codazzi equation. Note that Gauss’ equation (2.68)and
the Codazzi equation (2.73) depend only on the spatial metric, the extrinsic curvature
and their spatial derivatives. They can be thought of as the integrability conditions allow-
ing the embedding of a 3-dimensional slice with data (γ
ab
, K
ab
) inside a 4-dimensional
manifold M with g
ab
. As we will see in the next section, these two equations give rise to
the “constraint” equations.
However, before deriving the constraint equations in the next section, we first consider
the last remaining projection of
(4)
R
a
bcd
, namely with two indices projected in the normal
direction. This will involve a “time” derivative of K
ab
, and therefore we first compute
L
n
K
ab
= n
c
∇
c
K
ab
+ 2K
c(a
∇
b)
n
c
=−n
c
∇
c
∇
a
n
b
− n
c
∇
c
(n
a
a
b
) − 2K
c(a
K
c
b)
− 2K
c(a
n
b)
a
c
. (2.74)
Here we have used equation (2.52) to expand both terms. We can now insert
(4)
R
dbac
n
d
= 2∇
[c
∇
a]
n
b
, (2.75)
which yields
L
n
K
ab
=−n
d
n
c (4)
R
dbac
− n
c
∇
a
∇
c
n
b
− n
c
a
b
∇
c
n
a
−
n
c
n
a
∇
c
a
b
− 2K
c
(a
K
b)c
− 2K
c(a
n
b)
a
c
. (2.76)
Using the definition of a
b
= n
c
∇
c
n
b
and the relation
n
c
∇
a
∇
c
n
b
=∇
a
a
b
− (∇
a
n
c
)(∇
c
n
b
) =∇
a
a
b
− K
c
a
K
cb
− n
a
a
c
K
cb
(2.77)
several terms cancel and we find
L
n
K
ab
=−n
d
n
c (4)
R
dbac
−∇
a
a
b
− n
c
n
a
∇
c
a
b
− a
a
a
b
− K
c
b
K
ac
− K
ca
n
b
a
c
. (2.78)
Exercise 2.18 Show that L
n
K
ab
is purely spatial,
n
a
L
n
K
ab
= 0. (2.79)
Since L
n
K
ab
is purely spatial, projecting the two free indices in (2.78)leavestheleft
hand side unchanged and results in
L
n
K
ab
=−n
d
n
c
γ
q
a
γ
r
b
(4)
R
drqc
− γ
q
a
γ
r
b
∇
q
a
r
− a
a
a
b
− K
c
b
K
ac
. (2.80)
Exercise 2.19 Show that
D
a
a
b
=−a
a
a
b
+
1
α
D
a
D
b
α. (2.81)
2.6 The constraint and evolution equations 39
Finally, we simplify (2.80) with the help of equation (2.81), and find
L
n
K
ab
= n
d
n
c
γ
q
a
γ
r
b
(4)
R
drcq
−
1
α
D
a
D
b
α − K
c
b
K
ac
. (2.82)
Equation (2.82) is Ricci’s equation.
10
It relates the “time” derivative of K
ab
to a pro-
jection of the 4-dimensional Rieman tensor with two indices projected in the “time”
direction.
2.6 The constraint and evolution equations
Now we have assembled all the necessary tools, and can rewrite Einstein’s field
equations in a 3 + 1 form. Basically, we just need to take the equations of Gauss,
Codazzi and Ricci and eliminate the 4-dimensional Rieman tensor using Einstein’s
equations
G
ab
≡
(4)
R
ab
−
1
2
(4)
Rg
ab
= 8π T
ab
. (2.83)
The last few sections dealt with purely geometrical objects; we will now invoke Ein-
stein’s equations to link these geometrical objects to physical properties of spacetimes.
We will first derive the constraint equations from Gauss’ equation (2.68) and the Codazzi
equation (2.73), and will then derive the evolution equations from (2.53) and the Ricci
equation (2.82).
Contracting Gauss’ equation (2.68) once, we find
γ
pr
γ
q
b
γ
s
d
(4)
R
pqrs
= R
bd
+ KK
bd
− K
c
d
K
cb
, (2.84)
where K is the trace of the extrinsic curvature, K = K
a
a
. A further contraction yields
γ
pr
γ
qs (4)
R
pqrs
= R + K
2
− K
ab
K
ab
. (2.85)
The left hand side can be expanded into
γ
pr
γ
qs (4)
R
pqrs
= (g
pr
+ n
p
n
r
)(g
qs
+ n
q
n
s
)
(4)
R
pqrs
=
(4)
R + 2n
p
n
r (4)
R
pr
. (2.86)
Note that the term n
p
n
r
n
q
n
s (4)
R
pqrs
vanishes identically because of the symmetry prop-
erties of the Riemann tensor. We also have
2n
p
n
r
G
pr
= 2n
p
n
r (4)
R
pr
− n
p
n
r
g
pr
(4)
R = 2n
p
n
r (4)
R
pr
− n
p
n
r
(γ
pr
− n
p
n
r
)
(4)
R
= 2n
p
n
r (4)
R
pr
+
(4)
R = γ
pr
γ
qs (4)
R
pqrs
, (2.87)
10
In the general relativity literature, equations (2.68)and(2.73) are often jointly referred to as the Gauss–Codazzi
equations. In the differential geometry literature, however, (2.68) is known as the Gauss equation (which represents a
generalization of Gauss’s Theorema Egregium), while (2.73) is called the Codazzi or Codazzi–Mainardi relation.The
name Ricci equation for (2.82) is also more commonly used in differential geometry books than in general relativity
books.
40 Chapter 2 The 3+1 decompostion of Einstein’s equations
wherewehaveusedequation(2.86) in the last equality. Inserting this into the contracted
Gauss’ equation (2.85) yields
2n
p
n
r
G
pr
= R + K
2
− K
ab
K
ab
. (2.88)
We now define the energy density ρ to be the total energy density as measured by a normal
observer n
a
,
ρ ≡ n
a
n
b
T
ab
. (2.89)
Using Einstein’s equation (2.83) together with equations (2.88) and (2.89), we obtain
R + K
2
− K
ab
K
ab
= 16πρ. (2.90)
Equation (2.90)istheHamiltonian constraint.
Contracting the Codazzi equation (2.73) once yields
D
b
K
b
a
− D
a
K = γ
p
a
γ
qr
n
s (4)
R
pqrs
. (2.91)
The right hand side is
γ
p
a
γ
qr
n
s (4)
R
pqrs
=−γ
p
a
(g
qr
+ n
q
n
r
)n
s (4)
R
qprs
=−γ
p
a
n
s (4)
R
ps
− γ
p
a
n
q
n
r
n
s (4)
R
qprs
.
(2.92)
The last term vanishes again because of the symmetries of
(4)
R
efgd
, while the first term on
the right hand side can be rewritten using
γ
q
a
n
s
G
qs
= γ
q
a
n
s (4)
R
qs
−
1
2
γ
q
a
n
s
g
qs
(4)
R = γ
q
a
n
s (4)
R
qs
. (2.93)
Here the last equality holds because γ
q
a
n
s
g
qs
= γ
as
n
s
= 0. Collecting terms and inserting
into equation (2.91) we obtain
D
b
K
b
a
− D
a
K =−γ
q
a
n
s
G
qs
. (2.94)
We now define S
a
to be the momentum density as measured by a normal observer n
a
,
S
a
≡−γ
b
a
n
c
T
bc
, (2.95)
and find
D
b
K
b
a
− D
a
K = 8π S
a
. (2.96)
Equation (2.96)isthemomentum constraint.
Exercise 2.20 Consider a swarm of particles of rest-mass m and proper (comoving)
number density n, all moving with the same 4-velocity u
a
. The stress-energy tensor
for such a swarm is T
ab
= mnu
a
u
b
. Determine the energy density ρ and momentum
density S
a
for the swarm and provide a simple physical interpretation for the terms
in your expressions.