Автор не известен - Мобильный кран LTM 1050 3.1
Подождите немного. Документ загружается.

LTM 1050-3.1
Мобильный кран
Макс. грузоподъемность: 50 т
Макс. высота подъема: 54 м
Макс. вылет стрелы: 44 м
LTM 1050-3.1
2
Мобильный кран LTM 1050-3.1
Новаторское и экономичное решение
LTM 1050-3.1
3
ОсновнымиособенностямимобильногокранаLTM1050-3.1производстваконцерна„Либхерр“явля-
ютсядлиннаятелескопическаястрела,высокаягрузоподъемность,исключительнаяманевренность,а
такжеширокийнабороборудования,обеспечивающегокомфортибезопасностьрабобты.Кранклас-
са50тоннотличаетсясамымисовременнымитехнологическимихарактеристиками,необходимыми
дляпрактическогоприменения.
• Телескопическая стрела длиной 38 м
• Двухсекционный откидной удлинитель длиной 16 м, со встроенным монтажным удлинителем
• Общая масса 36 т, включая противовес 7 т, при нагрузке на ось 12 т
• Ширина автомобиля 2,55 м при шинах 16.00 R 25
• Универсальность применения благодаря высоким значениям грузоподъемности с полным и
частичным противовесом
• Активное зависящее от скорости рулевое управление задними осями
• Пневматические дисковые тормоза
• Возможность очень точно выполнять работу благодаря электронному управлению крана

LTM 1050-3.1
4
Ходовая часть
•Шестицилиндровыйтурбодизельный
двигательЛибхерр,270кВт/367л.с.
при2000об./мин,макс.крутящиймо-
мент1720Нмпри1000–1500об./мин
•Автоматизированнаякоробкапередач
ZFAS-TRONIC,12передачпереднего
хода,2передачизаднегохода
•2-ступенчатаяраздаточнаякоробка,
замедленныйход0,73км/час
•Мосты2и3-ведущие,мост1-позаказу
9110
20°
22°
11830
3835
2550
4500
6400
7169
7151
R = 7400
R = 8510
3508
11527
R = 9000
12 t 12 t 12 t16.00 R 25
LTM 1050-3.1
5
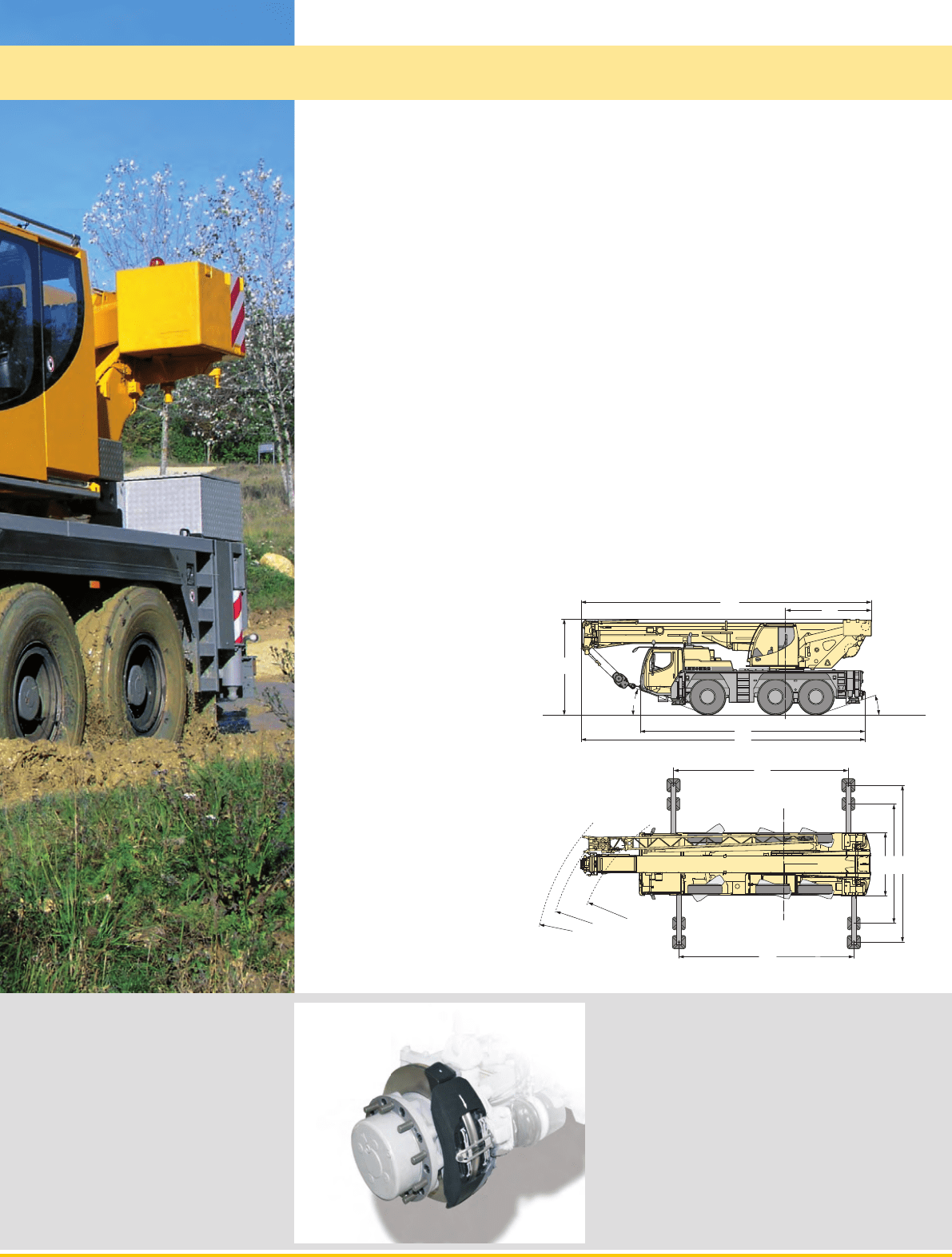
Современная концепция привода
Гидропневматическая подвеска
мостов „Niveaumatik“
•Нетребующиеуходацилиндры
подвески
•Большойзапаспрочностидляна-
грузкинаосьдо40т
•Ходподвески+100/-100мм
•Высокаябоковаяустойчивость
припрохожденииповоротов
•Широкийспектрпрограммрежи-
мовдвижения
Пневматические дисковые тормоза
•Высокоеусилиеторможения,улучшенная
управляемость
•Улучшеннаякурсоваяустойчивость
•Отсутствуетфединг(фединг-снижение
эффективноститормознойсистемыпри
нагреветормозов)
•Повышенныйсрокслужбы
•Сокращениевремениназаменунакладок
•Тормозныенакладкисиндикациейизноса
Высокая мобильность и экономичность
Мощный6-цилиндровыйдизельныйдвигательстурбонаддувомпроиз-
водстваЛибхерр,мощность270кВт/367л.с.,обеспечиваетпрекрасные
ходовыекачества.12-ступенчатаякоробкапередачфирмыZFсавтома-
тизированнойсистемойпереключенияAS-TRONICобеспечиваетвысо-
куюэкономичностьикомфорт.
•Пониженныйрасходтопливаблагодарябольшомучислупередачивы-
сокойэффективностисухогосцепления
•Прекраснаяманевренностьиминимальнаяскоростьзамедленного
ходаблагодарядвухступенчатойраздаточнойкоробке
•ABV–автоматическаясистемапредотвращенияблокировкитормозов
спротивобуксовочнойсистемойASR
Компактный, маневренный и оптимальный по массе
Благодарясвоейкомпактнойконструкции,LTM1050-3.1можетманеври-
роватьвсамыхстесненныхусловиях.Этоткранпринагрузке12тнаось,
перевозитссобойдо7тпротивовеса,чтообеспечиваетегоунивер-
сальноеиэкономичноеиспользование.
•Длинаходовогоустройствасоставляетвсего9,11м
•Наименьшийрадиус
поворота–всего7,4м
•Ширинаавтомобиляс
шинами16.00R25все-
го2,55м
•Радиусповоротапро-
тивовесасоставляет
всего3,5м

LTM 1050-3.1
6
5 программ рулевого управления
•Выборпрограммпростымнажати-
емклавиши
•Наглядноерасположениеэлемен-
товобслуживанияииндикации
•Допускаетсяпереключениепро-
граммвпроцесседвижения
•„Боковойход“легкоуправляется
рулевымколесом,нетнеобходи-
мостиподъемасреднегомоста

LTM 1050-3.1
7
Гибкая концепция рулевого управления
Активное рулевое управление задними мостами
Электро-гидравлическоерулевоеуправлениезаднимимостамипроис-
ходитвзависимостиотскоростииуглаповоротапереднегомоста.
Выбороднойизпятипрограммрулевогоуправления(Р)осуществляет-
сяприпомощиклавиш.
•Существенноеснижениеизносашин
•Повышениеманевренности
•Высокаяустойчивостьприбольшихскоростях
•Все3мостауправляемые
Высокий уровень безопасности –
разработка концерна Либхерр
•Центрирующийцилиндрдляавтоматическоговыставлениязадних
мостоввпрямоеположениепринеисправностивсистемеактивного
управлениязаднимимостами
•Дванезависимыхгидравлическихконтурасприводомгидронасосов,
отколесиотдвигателя
•Дванезависимыхуправляющихпроцессора
P1 Движение по дорогам общего поль-
зования
Рулевоеуправлениемоста1осущест-
вляетсямеханическирулевымколесом.
Рулевоеуправлениемоста3является
«активным»взависимостиотскорости
иповоротаколеспереднегомоста.При
скоростивыше30км/часоновстаетв
прямоеположение.
P2 Минимальный радиус поворота
Взависимостиотповоротаколеспервого
мостаможнорулевымколесомтакраз-
вернутьколесамостов2и3,чтобудетпо-
лученминимальныйрадиусповорота.
P3 Диагонально-боковой ход
Рулевымколесомосуществляетсяпово-
ротколесмостов2и3втомженаправ-
лении,вкоторомповорачиваютсяколеса
моста1.
P4 Отъезд без заноса
Рулевоеуправлениеколесамимостов2и
3осуществляетсявзависимостиотпово-
ротаколеспервогомостатак,чтоотсут-
ствуетзаносзаднейчасти.
P5 Независимое управление задними
мостами
Управлениеколесамимоста1осущест-
вляетсярулевымколесом;управление
колесамимостов2и3выполняетсяпри
помощиклавишнезависимоотповоротако-
лесмоста1.
Центрирующий цилиндр управ-
ления задними мостами
•Автоматическоевыставлениеза-
днихмостоввпрямоеположение
принеисправностивсистеме
активногоуправлениязадними
мостами
LTM 1050-3.1
8
Кабина водителя
•Коррозионностойкаяконструкцияизлисто-
войстали,катафорезноегрунтованиепо-
гружением
•Двериизволокнистыхкомпозитныхмате-
риаловсэлектрическимистеклоподъемни-
ками
•Полноезащитноеостекление
•Тонированныестекла
•Зеркаласэлектрообогревомиуправлением
•Сиденьеводителяспневмоподвескойи
опоройдляпоясницы
700
LTM 1050-3.1
9
Кабина крана
•Самонесущаяконструкцияизволокнистых
композитныхматериалов
•Оптимизированнаясистемаобогреваивен-
тиляции,автоматическаярегулировкатемпе-
ратуры,кондиционер–позаказу
•Открываемыепотолочноеизаднееокна
•Обзорувеличенблагодарябольшимокнам
•Сиденьемашинистакранаспоясничнойопо-
рой,множествовозможностейрегулировки
•Электрическивыдвигаемаябоковаяподножка
•Кабинаможетбытьотклоненаназадна20°–позаказу
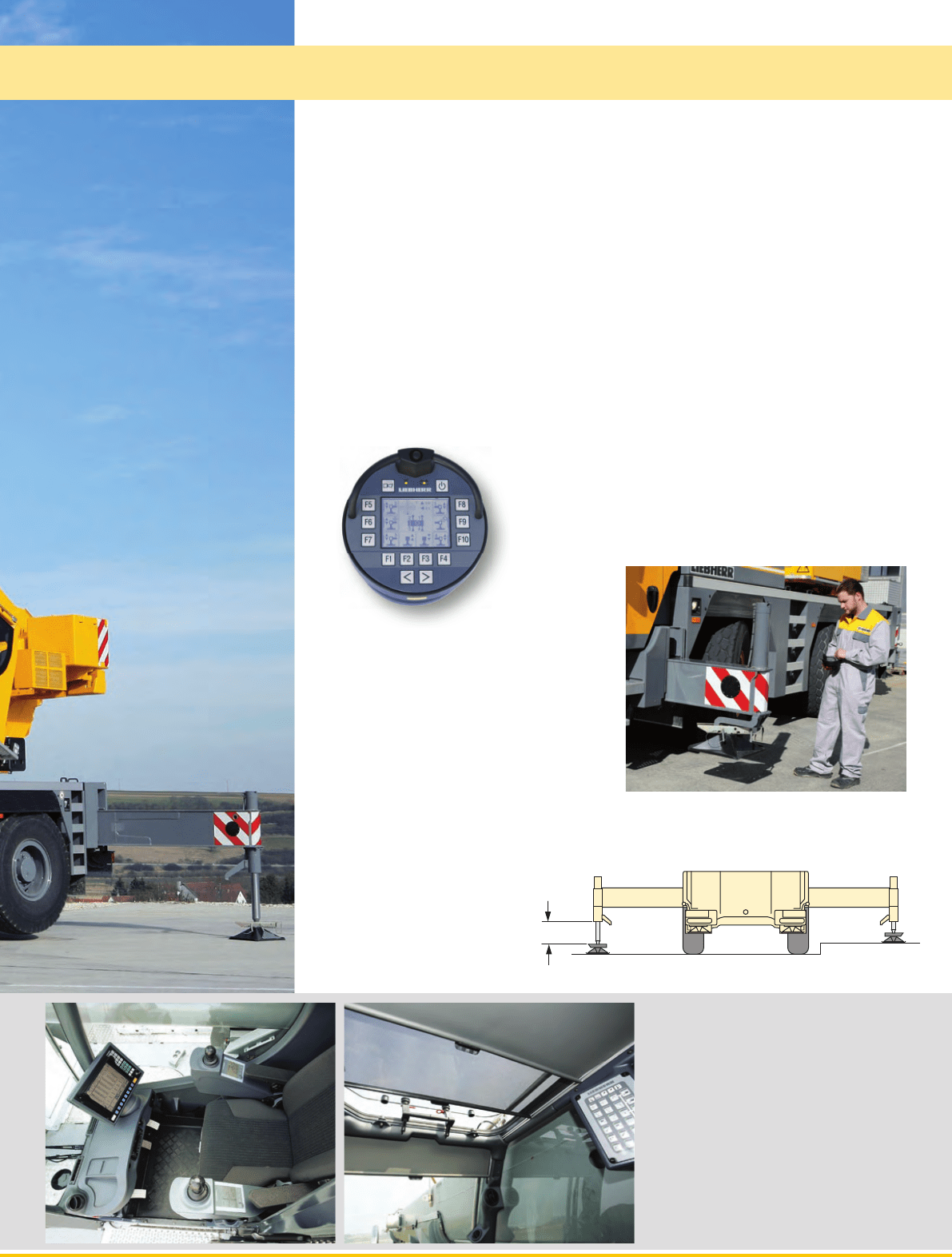
Установка крана на опоры –
быстро, удобно, надежно
•BTT-Bluetoothтерминал,дистанцион-
ноеустройствоуправленияииндика-
ции
•Электроннаяиндикациянаклона
•Запуск,остановкаирегулировкачисла
оборотовдвигателяспанелиуправле-
ния
•Освещениезоныустановкинаопоры
четырьмявстроеннымипрожекторами
•Ходопорныхцилиндров:передних
650мм,задних700мм
•Выдвижные1-ступенчатые
балкисгидравлическойси-
стемойвыдвижения,нетре-
бующейтехобслуживания
Современные кабины водителя и крановщика
Современнаякабинаводителяиотклоняемаякабинакрановщикаобе-
спечиваютудобствоикомфортнарабочемместе.Элементыуправления
ииндикациирасположенывсоответствиистребованиямиэргономики.
Врезультатеработастановитсяболеебезопаснойименееутомитель-
ной.
Быстрое и надежное оснащение
Конструкциякранапозволяетбыстро,безопасноисудобствомпроиз-
водитьустановкунаопоры,монтажпротивовеса,атакжеустановкудо-
полнительногооборудования.Лестницы,подножки,ручкииперилаобе-
спечиваютповышеннуюбезопасностьобслуживающегоперсонала.
Удобство управления и комфорт
LTM 1050-3.1
10
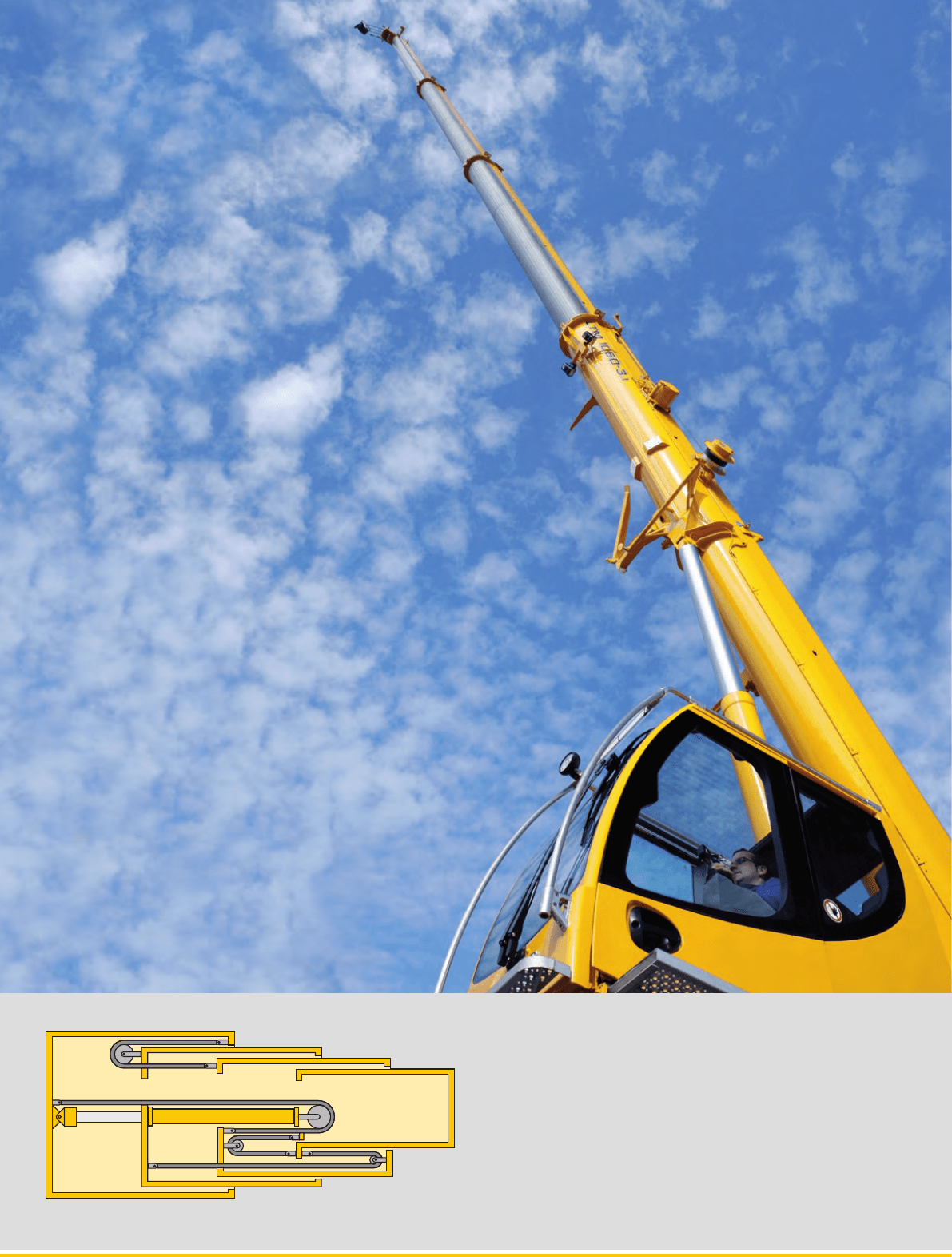
Проверенная в работе гидромеханическая система
телескопирования
•Надежныйодноступенчатыйгидравлическийцилиндр
двойногодействия
•Низкоерасположениецентратяжестистрелыблагода-
рядвойномуполиспастудлявыдвижныхсекций2и3
•Выдвижениеивтягиваниесекции1телескопической
стрелывыполняетгидравлическийцилиндр;секций
2и3-канаты
•Высокаягрузоподъемностьпрителескопировании