Allman E.S., Rhodes J.A. Mathematical Models in Biology: An Introduction
Подождите немного. Документ загружается.

96 Nonlinear Models of Interactions
1
r/s
P
Q
P=u/v
Q=(r/s)(1-P)
P=0
∆
Q=0
∆
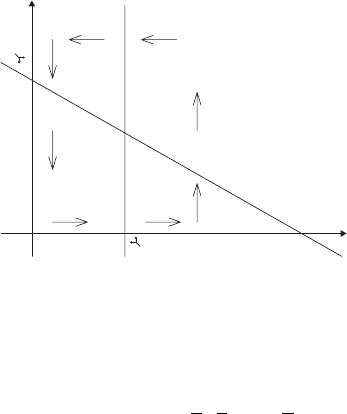
Figure 3.4. Nullclines, P = 0 and Q = 0, for the predator–prey model.
A little algebra to find the points of intersection of the nullclines gives us
formulas for the equilibria:
(0, 0), (1, 0), and
u
v
,
r
s
1 −
u
v
.
Although we can use the formula for this last equilibrium to see how it changes
if the parameters are varied, it’s more interesting to investigate this graphically
through Figure 3.4.
If either r or s is changed, the Q-nullcline is unaffected. However, either
increasing r or decreasing s causes r/s to increase, causing the downward
sloping line in the P-nullcline to intersect the Q-axis higher up. Note the
P-nullcline still crosses the P-axis at 1. This means that the equilibrium
(u/v, (r/s)(1 − u/v)) will simply move higher, so that P
∗
is unchanged while
Q
∗
increases.
From the model equations, increasing r or decreasing s seems to be
likely to benefit the prey population. If the populations are at equilib-
rium, is that how things turn out?
To think through the implications of this, suppose we imagine our model
applies to a certain agricultural crop (the prey) and an insect that eats it (the
predator). To get a higher yield, a new crop variety is introduced with a larger
value of r . The carrying capacity does not change, but we hope to “outgrow”
the predator, so that we end up with a greater crop. But, according to our
model, assuming the system settles into the equilibrium, this will cause P
∗
to remain unchanged while Q
∗
increases. In other words, the insect predator
actually benefits whereas the crop prey gains nothing.
3.2. Equilibria of Multipopulation Models 97
Although this may seem surprising at first, on further reflection you might
convince yourself it is reasonable. Even if you find it unreasonable, or not
in accord with observation of a real predator–prey interaction, and there-
fore decide to reject our model as not applicable, you have learned some-
thing. By writing our assumptions of the predator–prey interaction mathe-
matically in the form of a model and then analyzing it, we were able to
deduce the consequences of our assumptions. If these consequences are not
in accord with a real population, then we need to rethink our assumptions and
try to see what important features of the real situation our model has over-
looked.
Even if our goals are more theoretical, and we are not interested in pre-
cisely predicting future populations, the mathematical model is a tool both
for expressing our beliefs as to what factors affect population changes, and
for deducing the effects of those factors alone. If the deduced effects do not
fit with observation, we have discovered a gap in our knowledge. Identifying
such a gap could be viewed as progress toward both producing a better model
and understanding the real interspecies interaction.
Of course we can analyze the affect of varying u and v on the equilibrium
also and think through the biological implications similarly. We’ll leave that
as an exercise.
Nullclines and the direction of orbits. The nullclines are actually of
use not only for determining equilibria, but also for understanding better the
dynamics of the model. Consider again the P-nullcline, which consists of a
vertical line and a downward sloping line. This nullcline divides the plane
into several regions. Inside any of these regions, P must always be positive
or always be negative. This is because if it is positive at one point and negative
at another point, then at some point lying between the two it would have to be
zero. That point would lie on the nullcline, and so the nullcline must separate
the points where P has different signs. (We have implicitly assumed that
P is a continuous function of P and Q, so that there are no sudden jumps
in the value of P.)
To determine whether P is positive or negative on one of the regions, we
simply pick one point and evaluate. For instance, below the sloping line, pick a
point where P and Q are both quite small, but positive. Then, because P =
P(r(1 − P) − sQ), we can analyze the sign of P as follows: Because P
is small, 1 − P will be near 1, so r(1 − P) will be near r. Because Q is
small, sQ will be near 0. Thus, (r(1 − P) − sQ) > 0, and because P > 0,
then P = P(r(1 − P) − sQ) > 0.
98 Nonlinear Models of Interactions
If P is positive on a region in the phase plane, that means that any
population values in that region will produce an increase in P over the next
time step. In other words, the orbit will move to the right (and possibly up or
down as well, depending on the sign of Q). In Figure 3.4 we have placed
horizontal arrows pointing to the right on the region where we have shown
P > 0.
Why do we mark two regions in Figure 3.4 with arrows pointing to the
right, rather than just one?
As an exercise, you can show that P < 0 above the sloping line of the
P-nullcline. Thus, in that region, each time step will produce a decrease in
the value of P, and so arrows pointing to the left have been drawn there in
Figure 3.4. A similar analysis can be done of the sign of Q, which gives the
upward and downward pointing arrows in the figure.
Notice that these arrows strongly suggest that orbits will move in a coun-
terclockwise fashion around the interesting equilibrium, as in fact we have
seen in numerical experiments. However, from these arrows, we are unable
to tell if the orbit will spiral in toward the equilibrium or spiral outward, so
we cannot draw conclusions as to the stability of the equilibrium.
We also need to be slightly careful because with a discrete model, the
populations at successive time steps may well jump over the nullclines from
one time step to the next. This can lead to more erratic behavior, although often
it is transient. In fact, this happened in the orbit beginning near (1.35, 0.42) in
Figure 3.3 that appears to start moving around the equilibrium in a clockwise
direction before falling into the counterclockwise pattern. If you sketch the
nullclines in on Figure 3.3, you will see even this first step is in the general
direction predicted by the arrows of Figure 3.4.
Problems
3.2.1. The nullclines in Figure 3.4 are drawn assuming u/v < 1. What would
they look like If u/v = 1? If u/v > 1? Are there still three equilibria in
these situations? Are all equilibria biologically meaningful? Explain.
3.2.2. What is the effect of varying u and v on the equilibrium of the predator–
prey model of the text. Explain by describing the effects of these param-
eters on the locations of the nullclines in Figure 3.4. Do these effects
seem reasonable biologically?
3.2.3. For each of the cases u/v = 1 and u/v > 1, draw the correct version
of Figure 3.4 and on it draw arrows indicating where P and Q are
3.3. Linearization and Stability 99
positive and negative. Use your diagrams to predict the behavior of
some orbits, and then check your predictions using twopop.
3.2.4. Using the specified values of r , s, u, and v, sketch the nullclines in on
a copy of Figure 3.3, and mark arrows showing where P and Q
are positive and negative.
a. Are all orbit steps in the figure in accord with the arrows you drew?
b. If a point lies exactly on top of the P nullcline, do the arrows
indicate the correct direction of the orbit over the next time step?
c. If a point lies exactly on top of the Q nullcline, do the arrows
indicate the correct direction of the orbit over the next time step?
3.2.5. For the predator–prey model of the text, complete the work of analyzing
the signs of P and Q on each region created by the nullclines,
justifying all the arrows shown in Figure 3.4.
a. Show that above the sloped line of the P-nullcline, P < 0.
b. Show that to the left of the vertical line of the Q-nullcline, Q < 0.
c. Show that to the right of the vertical line of the Q-nullcline, Q > 0.
3.2.6. Analyze the predator–prey model given in Problem 3.1.10 of the last
section by doing the following:
a. Plot the nullclines and label regions in the phase plane with arrows
indicating the signs of P and Q.
b. Find all equilibria in terms of the parameters of the model, if pos-
sible.
3.2.7. A simple model for a predator–prey interaction where the predator has
a source of food in addition to the prey is:
P = rP(1 − P/K
1
) − sPQ,
Q = uQ(1 − Q/K
2
) + v PQ.
a. Explain why these equations model the described situation.
b. Choosing units so that K
1
= K
2
= 1, find and plot the nullclines for
this model. Draw arrows on your plot indicating the signs of P
and Q.
c. Compute all equilibria for the model.
d. What does your analysis of this model lead you to expect as typical
behavior of orbits? Check your predictions with a computer.
3.3. Linearization and Stability
An intuitive concept of stability of an equilibrium has already been used in our
discussion of the predator–prey model. Because in Figure 3.2 we observed
100 Nonlinear Models of Interactions
population values close to (P
∗
, Q
∗
) = (.4375, 1.4625) appear to move closer
to those equilibrium values as we follow their orbit, we said that equilibrium
appeared to be stable. Notice, however, that the movement toward equilibrium
is not simple. Because the inward spiral of the orbit has an oval shape, the orbit
is closer to the equilibrium on the more vertical parts of the spiral than on the
more horizontal parts. The orbit gets closer to the equilibrium, then further
away, then closer, then further away, and so on. The oscillatory overshoot is
even clearer in Figure 3.1. However, the overshoot does damp out, so that
over time populations near the equilibrium do seem to approach it, and never
again move as far away as they were.
As compelling as a computer simulation can be, it is also desirable to be
able to show mathematically the stability of the model. To do this, we use the
same basic approach as developed earlier for one-population models, such as
the logistic model.
To focus attention at the equilibrium, we let
P
t
= P
∗
+ p
t
,
Q
t
= Q
∗
+ q
t
,
where p
t
and q
t
represent small perturbations from the equilibrium. We are
interested in seeing how these perturbations change over time. Do they grow
or do they shrink?
For the model
P
t+1
= P
t
(1 + 1.3(1 − P
t
)) − .5P
t
Q
t
,
Q
t+1
= .3Q
t
+ 1.6P
t
Q
t
,
with equilibrium (P
∗
, Q
∗
) = (.4375, 1.4625), substituting in the expressions
for populations in terms of perturbations from equilibria, gives
.4375 + p
t+1
= (.4375 + p
t
)(1 + 1.3(1 − (.4375 + p
t
)))
− .5(.4375 + p
t
)(1.4625 + q
t
),
1.4625 + q
t+1
= .3(1.4625 + q
t
) + 1.6(.4375 + p
t
)(1.4625 + q
t
).
Some rather messy algebra, which is nonetheless worth checking, gives us
p
t+1
= .43125 p
t
− .21875q
t
− 1.3 p
2
t
− .5 p
t
q
t
,
q
t+1
= 2.34 p
t
+ q
t
+ 1.6 p
t
q
t
.
Now we are imagining population values P
t
and Q
t
that are close to P
∗
and Q
∗
, and so p
t
and q
t
are near 0. But then all second-order terms p
2
t
, p
t
q
t
,
and q
2
t
will be much smaller than the first-order terms p
t
and q
t
, because the

3.3. Linearization and Stability 101
product of two small numbers is much smaller than the original numbers. We
can therefore approximate our model by simply discarding the second-order
terms, since they are of negligible size. This gives
p
t+1
≈ .43125 p
t
− .21875q
t
,
q
t+1
≈ 2.34 p
t
+ q
t
.
Of course the accuracy of this approximation increases the closer p
t
and q
t
are to 0. Thus, we have approximated our nonlinear model, at least near the
equilibrium, by a linear one.
Now we can address the question of whether the equilibrium is stable or
not, by using our understanding of linear models. As was shown in Chapter
2, the eigenvalues of a linear model indicate whether the model predicts long-
term growth or decay.
Because
p
t+1
q
t+1
≈
.43125 − .21875
2.34 1
p
t
q
t
,
we just need to compute the eigenvalues of the matrix. Using MATLAB to do
this gives the two complex eigenvalues λ = .7156 ± .6565i. Computing the
absolute value of both eigenvalues yields |λ|=
√
.7156
2
+ .6565
2
= .9711.
Since this number is less than 1, the perturbations from equilibrium must get
smaller over time. Thus, the equilibrium really is stable as suspected.
As when we linearized the logistic model to understand its stability, we
could reinterpret the linearization process in terms of the calculus concept of
derivatives. Here, however, because the model tracks several different vari-
ables, we need partial derivatives, which are usually taught in multivariable
calculus. Therefore, we’ll omit that discussion, although one of the exercises
does move in that direction.
While the particular model and equilibrium we analyzed above turned
out to be stable, how else could the analysis have turned out? What would
instability look like? Are there different types of stability and instability?
As long as we look at a model of only two interacting populations, once
we find an equilibrium and linearize the model near the equilibrium, we
get a model described by a 2 × 2 matrix. Therefore, when the eigenvalues
are computed for this matrix, we will find two of them. Denoting the two
eigenvalues by λ
1
and λ
2
, we might see several different types of behavior
around the equilibrium, depending on the sizes of λ
1
and λ
2
.
r
If both |λ
1
| < 1 and |λ
2
| < 1, as was the case in our example, then
all small perturbations from the equilibrium shrink. In this case, nearby
102 Nonlinear Models of Interactions
populations values get closer to the equilibrium values, and so the equilib-
rium is stable.
r
If both |λ
1
| > 1 and |λ
2
| > 1, then all small perturbations from the equi-
librium grow, and so the equilibrium is unstable.
r
If |λ
1
| > 1 and |λ
2
| < 1, or vice versa, then different perturbations behave
qualitatively differently. A perturbation that is an eigenvector with eigen-
value λ
1
will grow, whereas one that is an eigenvector with eigenvalue λ
2
will shrink. Most perturbations are some combination of these, and so will
exhibit a combined behavior.
An equilibrium that exhibits this last type of behavior is a new sort that is
often referred to as a saddle equilibrium. To understand the name, imagine
a ball placed on a saddle, where a horse rider normally sits. If the ball is
pushed slightly forward or backward, so that it is forced to move in an uphill
direction, it will tend to move back toward the saddle point, as if it is at a
stable equilibrium. On the other hand, if it is pushed to the sides, where the
saddle goes downhill, it will tend to roll away from the saddle point, behaving
as if the equilibrium is unstable. Actually, most directions in which the ball
can be pushed move it in a combination of these directions, and it responds
by a combination of these behaviors. The net effect is that, although it may
move back toward the saddle point for a bit, it typically then heads downhill.
A saddle equilibrium, then, should be thought of as having a special type of
instability.
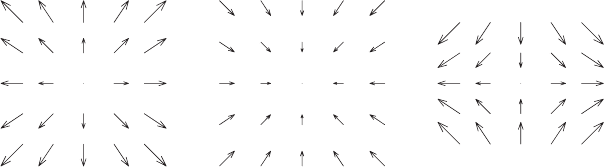
Schematically, these three cases are represented in Figure 3.5.
Figure 3.5 should be taken rather loosely, since we’ve ignored information
about the sign of the eigenvalues. If an eigenvalue is negative (or complex),
it will produce oscillatory behavior around the equilibrium as populations
move toward or away from the equilibrium. After all, that is what we saw in
studying linear models earlier, and our analysis here is based on analyzing a
|
| < 1
λ|λ |,
1
2
|
| > 1
λ|λ |,
1
2
|λ | > 1,
1
|
| < 1
λ
2
Figure 3.5. Possible behaviors near equilibrium points.
3.3. Linearization and Stability 103
linear approximation to our model. In our predator–prey example, the complex
nature of the eigenvalues explains why the approach to the stable equilibrium
involved the oscillations of the predator and prey populations, and hence the
spiral orbit in the phase plane.
Keep in mind that we have ignored the possibility that |λ
i
|=1, where we
may not be able to draw conclusions as to stability.
Also, it is important to realize that we have only discussed local stability of
a model – that is, what happens in close proximity to an equilibrium. Because
discrete population models can result in large jumps of populations from one
time step to the next, it is much harder to analyze global stability – that is,
whether all initial populations eventually approach an equilibrium or not.
Finally, imagine modeling n interacting populations. Such a model is given
by n equations, and on computing equilibria, will have an n × n matrix model
as its linearization at an equilibrium. Thus, there will be n eigenvalues to
consider. Only when all eigenvalues are less than one in absolute value can
we conclude that an equilibrium is stable.
Problems
3.3.1. In the text, the equilibrium (.4375, 1.4625) of the predator–prey model
was investigated for stability by linearizing and computing eigenvalues.
Investigate the stability of its other two equilibria the same way. Are
your results biologically reasonable? Do they agree with numerical
experiments?
3.3.2. For the predator–prey model,
P
t+1
= P
t
(1 + .8(1 − P
t
)) − 4P
t
Q
t
,
Q
t+1
= .9Q
t
+ 2P
t
Q
t
,
a. Compute the equilibria.
b. Use MATLAB and twopop to make an informed guess as to whether
the equilibria are stable or unstable.
c. Linearize the model at each of the equilibria and compute eigenvalues
to determine stability.
3.3.3. For the predator–prey model,
P
t+1
= P
t
(1 + 1.6(1 − P
t
)) − .1P
t
Q
t
,
Q
t+1
= .3Q
t
+ .6P
t
Q
t
,

104 Nonlinear Models of Interactions
a. Compute the equilibria. Which ones are biologically meaningful?
b. Use MATLAB and twopop to make an informed guess as to
whether the equilibria are stable or unstable.
c. Linearize the model at each of the equilibria and compute eigenval-
ues to determine stability.
3.3.4. Rolling a ball on a saddle provided a good image for the third type of
equilibrium in Figure 3.5. On what surface would a ball roll to depict
the first type? The second type?
3.3.5. Determining the stability of a model only makes sense at an equi-
librium. If a point (P
#
, Q
#
) is not an equilibrium of a model, it is
meaningless to ask whether it is stable or unstable.
Suppose, however, you mistakenly thought (.5, 1.5) was an equilib-
rium of the predator–prey model analyzed in the text. What happens
mathematically if you attempt to determine its stability through lin-
earization? What indications are there that you have made a mistake?
3.3.6. For the predator-prey model of this chapter, the equilibrium (0,0) is
always a saddle, regardless of parameter values.
a. Explain why this is so intuitively, by considering initial populations
of (P
0
, 0) and (0, Q
0
), for small P
0
and Q
0
.
b. Show the linearization of the model at (0,0) gives
1 + r 0
01− u
.
What are the eigenvalues of this matrix? Explain why, for biolog-
ically reasonable values of the parameters, this means (0,0) is a
saddle.
3.3.7. (Calculus) Stability of equilibria can be determined through deriva-
tives, as in Chapter 1, provided you understand partial derivatives. The
Jacobian matrix of a model
P
t+1
= F(P
t
, Q
t
),
Q
t+1
= G(P
t
, Q
t
)
is the matrix
∂ F
∂ P
t
∂ F
∂ Q
t
∂G
∂ P
t
∂G
∂ Q
t
.
a. For the predator–prey model,
P
t+1
= P
t
(1 + 1.3(1 − P
t
)) − .5P
t
Q
t
,
Q
t+1
= .3Q
t
+ 1.6P
t
Q
t
compute the Jacobian matrix.

3.4. Positive and Negative Interactions 105
b. Evaluate the Jacobian matrix at the point (P
∗
, Q
∗
) = (.4375,
1.4625). Is it the same matrix obtained in the text by linearizing
algebraically?
3.3.8. (Calculus) Repeat the last problem more generally, without specifying
parameter values.
a. For the predator–prey model,
P
t+1
= P
t
(1 + r (1 − P
t
)) − sP
t
Q
t
,
Q
t+1
= uQ
t
+ v P
t
Q
t
,
compute the Jacobian matrix.
b. Evaluate the Jacobian matrix at the three equilibria (P
∗
, Q
∗
) =
(0, 0), (1, 0), and (
u
v
,
r
s
(1 −
u
v
)) to get linearizations of the model
at those points.
3.4. Positive and Negative Interactions
So far in this chapter, a predator-prey model has been the guiding example for
the development and mathematical analysis of a two-population model. Now
that the tools have been introduced, they can be applied to models of other
interactions as well. By linking the basic elements of the models we have
already developed in new ways, a surprisingly wide range of phenomena
can be modeled. As illustrations, we present three examples. We’ll leave
the complete analysis to you, but give some simple examples of models of
interesting interactions.
Competition. Competition between two species that fill the same niche
in an environment might be modeled by the equations
P = rP(1 − (P + Q)/K ),
Q = uQ(1 − (P + Q)/K ).
As written, these equations show the competition occurring solely through
the struggle for the resources represented by the carrying capacity. Each
population grows according to the logistic model if the other population is
absent. The presence of the second population acts to reduce the growth of
the first, just as the presence of the first reduces the growth of the second.
Note also that the two species may have different intrinsic growth rates.
A natural question about competing species is whether one always “wins,”
or if coexistence is possible. Because the only allowed difference between
the two populations in the model is their intrinsic growth rates r and u, you