Алексеев В.С. Основы электропривода. Часть 1
Подождите немного. Документ загружается.

Камчатский государственный технический университет
В.С. Алексеев
ОСНОВЫ
ЭЛЕКТРОПРИВОДА
Часть I
Учебно-методическое пособие по решению задач
и расчету электромеханических характеристик
судового электропривода для курсантов и студентов специальности
240600 «Эксплуатация судовых энергетических установок»
очной и заочной форм обучения
Петропавловск-Камчатский
2005
УДК 62-83
ББК 31.291
А47
Рецензент:
А.А. Хатылов,
заведующий кафедрой электротехники
и электрооборудования судов
Алексеев В.С.
А47 Основы электропривода. Ч.1. Учебно-методическое пособие
по решению задач и расчету электромеханических характеристик
судового электропривода для курсантов и студентов
специальности 240600 «Эксплуатация судовых энергетических
установок» очной и заочной форм обучения. – Петропавловск-
Камчатский: КамчатГТУ, 2005. – 126 с.
Пособие составлено в соответствии с рабочими программами по
дисциплинам "Основы судового электропривода", "Судовой
автоматизированный электропривод" и государственным образо-
вательным стандартом высшего профессионального образования
"Требования к минимуму содержания и уровню подготовки выпускника"
по специальностям: 240600 "Эксплуатация судового электро-
оборудования и средств автоматики".
Рекомендовано к изданию решением учебно-методического
совета КамчатГТУ (протокол № 3 от 23 декабря 2004 г.).
УДК 62-83
ББК 31.291
© КамчатГТУ, 2004
© Алексеев В.С., 2004
2
СОДЕРЖАНИЕ
Введение.
1. Механика привода 4
2. Построение механических характеристик электродвигателя
постоянного тока независимого возбуждения. 20
2.1. Построение естественной характеристики. 20
2.2. Построение пусковых реостатных характеристик. Расчёт
пусковых сопротивлений. 22
2.3. Построение тормозных характеристик. Расчёт
сопротивлений при торможении. 29
2.4. Построение механических характеристик при
регулировании частоты вращения двигателей независимого или
параллельного возбуждения. 44
3. Расчет характеристик двигателей последовательного
возбуждения. 66
3.1. Построение естественных и пусковых характеристик 66
3.2. Построение характеристик двигателя последовательного
возбуждения в режиме торможения. 73
3.3. Регулирование частоты вращения двигателя
последовательного возбуждения 76
4. Расчёт характеристик двигателя смешанного возбуждения. 88
5. Расчет характеристик асинхронных двигателей. 97
5.1. Расчет пусковых характеристик двигателя с фазным ротором 103
Приложения 133
3
ВВЕДЕНИЕ
Полный курс электропривода для судовых электромехаников
включает в себя две основные части: "Основы электропривода" и
"Судовой автоматизированный электропривод".
Для того чтобы правильно выбрать электродвигатель и рассчитать
его пусковые характеристики, в курсе "Основы электропривода"
большое внимание уделяется практическим расчетам механических
характеристик двигателей постоянного и переменного тока.
Основная цель данного пособия – помочь студенту в решении
практических задач при расчете механических и скоростных
характеристик во всех режимах работы электропривода.
С этой целью дано краткое изложение методов расчета
характеристик, а так же способы правильного подбора регулировочных
сопротивлений. Для лучшего усвоения материала предложены примеры
с решениями, а для закрепления полученных знаний в конце каждой
главы даны задачи для самостоятельного решения.
Для самостоятельной работы каждый студент выбирает в
приложении свой электродвигатель постоянного или переменного тока
согласно своему варианту и производит соответствующий расчет
согласно предложенным задачам.
4
1. Механика привода
При поступательном перемещении активная или движущая сила F
всегда уравновешивается силой сопротивления машины F
c
и
инерционной силой
dt
dV
m
, возникающей при изменении скорости.
Уравнение равновесия сил будет выглядеть:
dt
dV
mFF
C
=−
[
]
н
.
Аналогично, равновесие моментов для вращательного движения:
dt
d
JMM
C
ω
=± m
[
]
МН
⋅
,
где М – электромагнитный момент на валу двигателя.
М
С
– момент сопротивления производственного механизма.
dt
d
J
ω
- динамический момент, представляющий собой момент,
который расходуется на продолжения инерции J и сообщение
ускорения d
ω
/dt системе привода.
В расчетах электропривода возникает необходимость в приведении,
т.е. пересчете моментов и масс различных элементов. К какому – либо
одному из элементов, т.к. эти элементы движутся с различными
скоростями.
Например, момент электродвигателя в установившемся режиме
уравновешивается моментом М
С
- статистическим моментом, который
выражается через момент сопротивления производственного механизма
(рабочего органа) уравнением:
η
⋅
=
i
М
М
ор
С
.
,
где
РО
ДВ
i
ω
ω
= - передаточное число или передаточное отношение
скоростей двигателя и производственного механизма (рабочего органа);
η
- КПД передачи.
При наличии нескольких передаточных звеньев между двигателем и
рабочим органом, момент сопротивления, приведенный к валу
двигателя:
М
С
= М
РО
nn
iiii
ηηηη
...
1
...
1
321321
⋅⋅
⋅
⋅⋅
.
5
С учетом поступательного движения рабочего органа, имеем :
М
С
=
()
ηηηωη
⋅⋅
⋅+
=
⋅
=
⋅⋅
⋅
⋅
=
⋅
⋅
i
ДGG
i
ДF
iV
ДVFVF
б
бpoбpopo
222
0
дв
[
]
МН
⋅
где G – вес груза
[
]
н ;
−
0
G
вес холостого гака
[
]
н ;
Д
б
- диаметр барабана
[
]
м ;
V=
2
б
po
Д
⋅
ω
- скорость перемещения груза
[
]
см / ;
б
дв
Д
iV ⋅⋅
=
2
ω
- частота вращения двигателя выраженная через
скорость перемещения груза.
Следует учитывать, что потери определяемые трением в передаче
являются сложной функцией угловой скорости и передаваемого
момента. Поэтому в зависимости от величины нагрузки (загрузки) при
расчете привода необходимо пользоваться кривыми зависимостями
КПД передачи от загрузки (смотри Приложение, рис.1).
В случае обратного потока энергии от рабочего органа к двигателю,
значение приведенного статического момента определяется
выражением:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−=
η
1
2
..
..
i
М
М
ОР
ОБС
.
Из уравнения следует, что при КПД передачи
η
>0,5 имеет место
состояния тормозного спуска груза, когда под действием груза
двигатель будет работать в тормозном режиме (генераторном, с отдачей
энергии в сеть).
В случае
η
<0,5 тормозной спуск не возможен.
Значение обратного приведенного момента с учетом
поступательного движения рабочего органа:
(
)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
⋅
=
ηη
1
2
2
1
2
2
0
.
i
ДGG
i
ДF
М
ББ
ОБС
,
[
]
мН
⋅
.
На рис. 1.1 изображена схема приведения для грузового устройства.
6
Приведение моментов инерции к валу двигателя рассчитывают по
формуле:
2
22
2
2
1
2
2
2
1
2
2
1
10
...
1
.....
11
ρ
m
iii
J
ii
J
i
JJJJ
n
nДВ
+
⋅
++
⋅
+++= ,
где - момент инерции двигателя;
ДВ
J
0
J - суммарный момент инерции элементов, вращающихся
со скоростью
дв
ω
, кроме двигателя (например: муфты, шестерни,
шкива и т. д.);
1
1
ω
ω
дв
i = ;
i
дв
i
i
ω
ω
= - передаточное отношение между валом
двигателя и соответствующим валом электромеханической системы
привода;
i
RRV
Б
дв
Б
дв
=
⋅
==
ω
ω
ω
ρ
δ
- радиус приведения поступательно-
движущейся массы к валу двигателя;
R
Б
– радиус барабана, м;
n
iiiii ⋅⋅=
321
-общее передаточное отношение
Значение i и
ρ
определяются по конструктивным параметрам
преобразовательных механизмов. Например, передаточное число i для
пары зубчатых колес находится как отношение их чисел зубьев, а для
ременной передачи – как отношение диаметров шкивов.
Радиус приведения для шкивов и барабанов равен их
конструктивным радиусам:
Рис. 1.1 Электромеханическая система до (а) и после (б) приведения
Эл. двигатель
х
х
х
х
х
х
G
ω
ДВ
ω
δ
M
1
; I
ДВ
I
1
ω
1
I
2
ω
2
G
0
V
D
δ
ω
ДВ
M
СТ
; I
I
3
ω
3
а)
б)
7
i
R
δ
ρ
= .
А для кривошипно-шатунного механизма, при R
K
<<l
Ш
КК
R
ϕ
ρ
sin⋅=
,
где - радиус приведения кривошипа;
К
R
Ш
l - длина шатуна;
К
ϕ
- угол поворота кривошипа;
R
K
ω
K
φ
K
l
Ш
Рис. 1.2 Схема кривошипно-шатунного механизма
В расчетах обычно принимают момент инерции элементов
расположенных на валу двигателя равных 0.1 – 0.3 момента инерции
двигателя. В этом случае приведенный момент инерции
2
2
ρ
m
i
J
КJJ
мех
дв
++= ,
где К=1,1÷1,3;
мех
J - момент инерции вращающихся масс исполнительного
механизма.
Пример 1.1
Рассчитать момент инерции коленчатого вала с маховиком, если
удельный вес материала стали , а число
монтажных отверстий в маховике четыре.
3
108.7 ⋅=
γ
3
/ мкг
Чертеж маховика и коленчатого вала указанно рис. 1.3
8
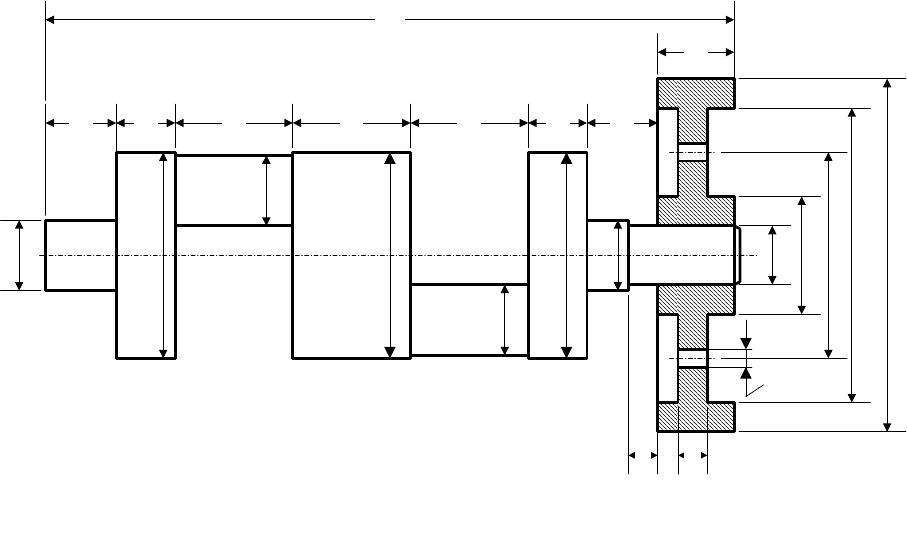
100120 200 200 200 100 120
130
50 50
1170
D
1
=600
d'
2
=200
d
1
=100
D
0
=350
d
2
=120
D
3
=350
d
3
=120
D
4
=350
d
4
=120
D
5
=350
d
6
=120
4 отв. d
0
=30
M
LK G
F
E
D
C
B
A
D
2
=500
Рис. 1.3 Чертеж маховика и коленчатого вала
9
Решение:
Расчет производят относительно оси вращения коленчатого вала. За
исходные величины принимают L – длину данного элемента и его
диаметр D или d.
Расчет для маховика.
Общий момент инерции маховика складывается из:
момента инерции маховика как полого цилиндра «А»
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
⋅⋅
=
4
1
4
1
222
dD
L
J
А
γπ
[]
2
44
3
43.8
2
1.0
2
600.0
2
13.0108.714.3
мкг ⋅=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅⋅⋅
=
;
момента инерции выемки «В» с обеих сторон
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
⋅⋅
=
4
2
4
2
222
dD
L
J
Б
γπ
[]
2
44
3
72.3
2
2.0
2
5.0
2
08.0108.714.3
мкг ⋅=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅⋅⋅
=
;
момента инерции четырех монтажных отверстий
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⎟
⎠
⎞
⎜
⎝
⎛
=Ι
822
2
4
2
0
2
0
2
0
dD
d
L
ОТВ
πγ
[]
2
2
2
2
3
0168.0
8
03.0
2
350.0
2
2
03.0
05.0108.74
мкг ⋅=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⎟
⎠
⎞
⎜
⎝
⎛
⋅⋅⋅⋅⋅
=
π
.
Общий момент инерции маховика
[
]
2
max
69,40168,072,343,8 мкгJJJJ
ОТВВA
⋅=−−=−−=
Расчет коленчатого вала.
Момент инерции коленчатого вала складывается из момента
инерции конца вала «С» под маховик:
[]
2
4
3
4
1
0136.0
2
1.0
2
18.0108.714.3
22
мкг
dL
J
С
⋅=
⎟
⎠
⎞
⎜
⎝
⎛
⋅⋅⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅=
πγ
Момент инерции вала «D»:
[]
2
4
3
4
2
0189.0
2
120.0
2
120.0108.714.3
22
мкг
dL
J
D
⋅=
⎟
⎠
⎞
⎜
⎝
⎛
⋅⋅⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
=
πγ
.
10