Абдулин С.Ф. Системы автоматики предприятий стройиндустрии
Подождите немного. Документ загружается.

g
1
g
3.5.4. Автоматическое регулирование вязкости (подвижности)
бетонной смеси
В бетоносмесителях принудительного перемешивания для
регулирования вязкости бетонной смеси можно использовать зависимость
мощности, потребляемой электродвигателем смешивающего механизма,
от водоцементпого соотношения: Р =f (В/Ц).
Наиболее точное математическое описание экспериментальной
зависимости Р =f(B/H) дает кусочно–параболическая аппроксимация, при
которой отдельные участки графика (рис. 3.67, б) заменяются параболами
вида
P = a(x–b)
2
+c, (3.44)
где а – коэффициент, зависящий от выбранного участка кривой; b –
абсцисса вершины аппроксимирующей параболы; с – ордината вершины
аппроксимирующей параболы; х – неизвестное водоцементное
соотношение.
При высокой точности дозирования компонентов водоцементное
соотношение бетонной смеси зависит от влажности заполнителей.
Поэтому для регулирования вязкости бетонной смеси необходимо
корректировать дозу воды в каждом замесе. Это можно осуществлять,
контролируя содержание воды при перемешивании компонентов и
определяя требуемую добавку воды для получения заданного
водоцементного соотношения.
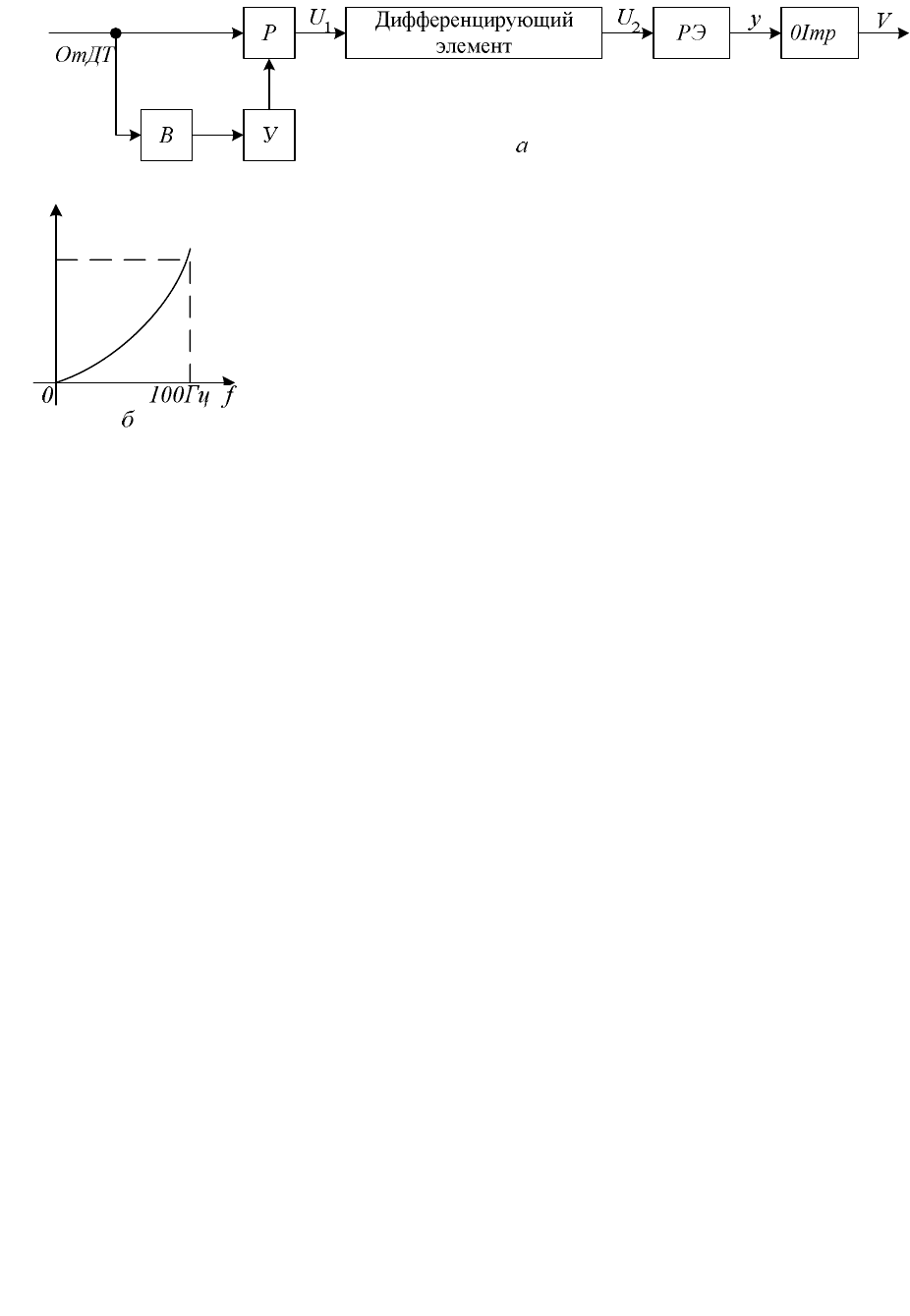
Рис. 3.66. Устройство формирования командного сигнала
по производной от тока двигателя: а–структурная схема;
б–частотная характеристика
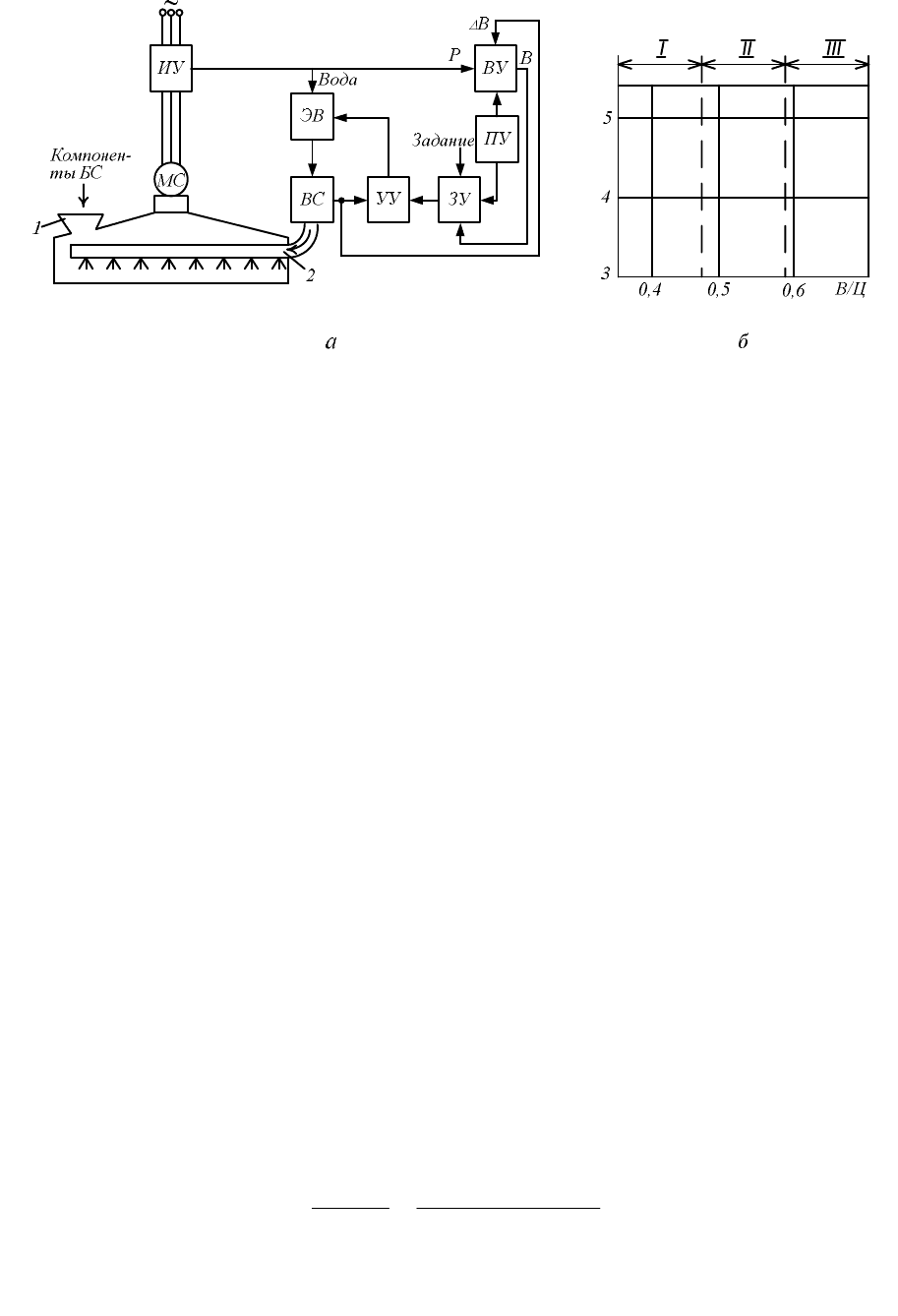
Рис. 3.67. Автоматическое регулирование технической вязкости бетонной смеси: а –
структурная схема устройства регулирования; б – зависимость мощности двигателя
смесителя от водоцементного соотношения
Если измерять мощность, потребляемую электродвигателем
бетоносмесителя при трех различных значениях водоцементного
соотношения, то получается следующая система уравнений:
ï
ï
þ
ï
ï
ý
ü
++-=
++-=
+-=
,
;
;
2
23
2
12
2
1
c)Дba(xP
c)Дba(xP
cb)a(xP
(3.45)
где
1
D
– изменение водоцементного соотношения в период между первым
и вторым измерениями;
2
D – то же в период между первым и третьим
измерениями. Чтобы исключить коэффициент с, из второго и третьего
равенств системы вычитаем первое:
[
]
[ ]
.)(2
;)(2
2213
1112
DD+-=-
D
D
+
-
=
-
bxaPP
bxaPP
(3.46)
Разделив почленно полученные равенства, исключаем коэффициент а:
[
]
[ ]
22
11
13
12
)(2
)
(
2
DD+-
D
D
+
-
=
-
-
bx
b
x
PP
P
P
. (3.47)
Из этого выражения находим
[ ]
.
)()(2
)()(
113212
2
212
2
113
D--D-
D--D-
=-
PPPP
PPPP
bx (3.48)
В данном случае изменения водоцементного соотношения
1
D
и
2
D
обусловлены добавками в бетоносмеситель воды
1
B
D
и
2
B
D
соответственно. Поэтому, подставив в выражение значения величин
В/Ц
x
=
;
Ц
В
/
11
D
D
= и
Ц
В
/
22
D=
D
, после преобразования получим
формулу, определяющую содержание воды в замесе:
[ ]
bЦ.
BPPBPP
BPPBPP
B +
D--D-
D--D-
=
113112
2
212
2
113
)()(2
)()(
Таким образом, измеряя величины P
l
, P
2
, Р
3,
1
B
D
и
2
B
D
, можно
контролировать содержание воды в замесе и корректировать ее дозу для
получения заданного водоцементного соотношения или вязкости бетонной
смеси. Рассмотрим работу системы автоматического регулирования
вязкости бетонной смеси (рис. 3.67, а). При работающем двигателе
смешивающего механизма МС в бетоносмеситель через загрузочную
воронку 1 поступают дозы цемента, песка и щебня. Вода дозируется с
помощью водомерного счетчика ВС, электромагнитного вентиля ЭВ и
управляющего устройства УУ в соответствии с сигналом задающего
устройства ЗУ. Вода подается в смеситель через сливную трубу 2.
В начале цикла в смеситель подается некоторая начальная доза воды и
компоненты предварительно перемешиваются. Затем по команде
программного устройства ПУ в вычислительном устройстве ВУ
запоминается значение потребляемой двигателем МС мощности Р
1
,
которая контролируется измерительным устройством ИУ, и увеличивается
доза воды на величину
1
ВD , что также запоминается в ВУ. Аналогично
последовательно во времени фиксируются значения Р
2
,
2
В
D
, Р
3
и
вычисляется содержание воды В в замесе. В результате сравнения
величины В с заданным значением 3 в ЗУ определяется необходимая
добавка воды ВВ
-
=
D
3
3
для получения бетонной смеси с требуемым
водоцементным соотношением.

3.6. Некоторые передовые технологии автоматизации
(ПТА) на российских бетонных заводах
Несмотря на имеющиеся сложности в развитии экономики РФ, нам
представляется, что новые передовые технологии автоматизации в
строительной индустрии всё же разрабатываются и внедряются. Так,
например, в статье [54] освещались передовые технологии автоматизации с
9 по 11 декабря 2003 года в Москве в Центре международной торговли во
время выставки «Передовые технологии автоматизации 2003» (ПТА-2003).
Рассмотрим некоторые современные разработки, которые используются на
бетонных заводах с передовой технологией автоматизации и приведем их
кратких технико-экономические характеристик.
Организатором выставки стала выставочная компания
«Экспотроника» при официальной поддержке Российского агентства по
системам управления, Российской инженерной академии, Управления по
атомному машиностроению и приборостроению Минатома РФ,
Российского представительства Общества приборостроения, систем и
автоматики (ISA), Координационного совета по проблемам стандартизации
систем промышленной автоматизации.
ПТА-2003 – это ведущая специализированная выставка оборудования
и технологий для АСУ ТП и встраиваемых систем. Главной целью
выставки является демонстрация передовых технических решений в
области промышленной автоматизации, новинок оборудования и
программного обеспечения, а также услуг по разработке и внедрению
автоматизированных систем.
Среди участников ПТА-2003 были крупнейшие российские и за-
рубежные производители оборудования и программных средств для АСУ
ТП, разработчики аппаратуры и комплексных решений автоматизации в
различных отраслях промышленности, производственно-внедренческие
фирмы, поставщики специализированных компьютеров и промышленной
электроники.
Одновременно с выставкой в конференц-зале ЦМТ прошла Все-
российская конференция по АСУ ТП и встраиваемым системам. Вни-
манию слушателей конференции предлагались доклады ведущих
поставщиков оборудования, рассказы о новинках в области программного
обеспечения SCADA и MES, о современных инструментальных средствах
и методах разработки встраиваемых систем контроля и управления.
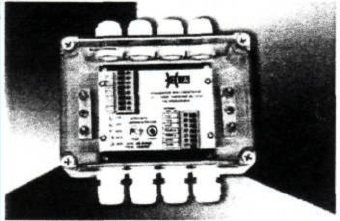
Датчик динамографа
Датчик углового положения и нагрузки стационарный «ДПН-СТ10»
предназначен для контроля работы скважины со штанговым глубинным
насосом в системах телемеханики (рис. 3.68).
Рис. 3.68 Датчик динамографа
Он служит для сбора данных, используемых при построении
динамограммы (зависимости изменения нагрузки от перемещения
полированного штока станка-качалки), и устанавливается стационарно на
балансире станка-качалки, что не мешает работам по ремонту скважин.
Для построения динамограммы датчик выдает два сигнала:
- положение штока (значение вертикальной координаты
положения);
- нагрузка на шток (значение вертикальной составляющей
растягивающего усилия, действующего на шток).
Достоинства датчика можно свести к следующим характеристикам:
- цифровые методы измерения положений и нагрузки;
- цифровая коррекция дрейфа чувствительных элементов
датчика;
- высокая чувствительность измерения;
- встроенные алгоритмы обработки данных, позволяющие
получить высокую точность измерений;
- возможность установки на значительном удалении от
контроллера;
- легкость установки на станок-качалку;
- компактность и отсутствие разъемных и движущихся частей;
- устойчивость к перепадам температуры;
- низковольтное питание датчика, малая потребляемая
мощность.
Использование датчика в системах телемеханики необходимо для
определения неисправностей насосного оборудования по форме
динамограммы, что позволяет прогнозировать очередность ремонтных и
профилактических работ на скважинах, формировать список аварийных
скважин, оптимизировать работу скважины в целом.
Вычисление дебита по динамограмме с учетом газового фактора
позволяет осуществлять текущий контроль продуктивности скважины без
замеров дебита прямыми методами.
Определение срыва подачи насоса по форме динамограммы разрешает
эксплуатировать малодебитные скважины в оптимальном, экономичном
режиме с остановками на накопление по срыву подачи.
Автоматический расчет фактического суточного дебита скважины с
учетом простоев и остановов помогает иметь четкую информацию по
потерям в добыче и причинам потерь.
Суммирование дебитов и расходов по кустам, бригадам, цехам,
промыслам позволяет автоматически контролировать баланс жидкости, а в
случае отклонений выдавать аварийные сообщения.
Система управления производством
Этим же предприятием была разработана интересная система
управления производством (рис. 3.69) [24]. Применение в качестве
контроллеров с развитыми коммуникационными функциями РС-
совместимых индустриальных компьютеров – это простое, экономичное и
проверенное решение для автоматизации множества производств, не
относящихся к высшим категориям опасности, ПО системы объединяет в
себе среду настройки и среду исполнения, что позволяет оперативно вно-
сить изменения как по ходу пусконаладочных работ, так и в течение всего
срока службы системы.
Рис. 3.69. Комплект устройств системы управления
Простота, удобство и функциональность – вот основные достоинства,
на которых строится предлагаемая АСУ ТП.
Задачи, решаемые системой, сводятся к следующим:
- измерение технологических параметров;
- визуализация процесса с иерархической структурой экранных
форм;
- сигнализация отклонений технологических параметров
посредством визуального и голосового оповещения;
- управление технологическим процессом;
- архивирование и документирование информации;
- информационное обеспечение специалистов;
- защита от несанкционированного доступа.
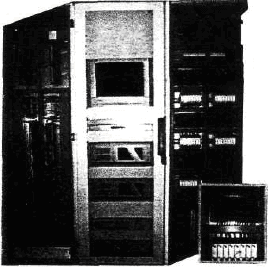
Рис. 3.70. Общий вид сервера ввода-вывода
«Прозрачность» информации внутри предприятия достигается
использованием открытых технологий и промышленных стандартов при
создании программного обеспечения сбора, обработки, хранения и обмена
данными.
Полный цикл работ от разработки, поставки и монтажа до
пусконаладки и сдачи системы «под ключ» исключает возможность
возникновения спорных вопросов между исполнителем и заказчиком по
поводу неучтенных в контракте работ, доплат, допоставок и т.д.
Центральное звено системы – «сервер ввода-вывода» (рис. 3.70) [24].
Функции «сервера» выполняют один или несколько индустриальных
компьютеров в стоечном исполнении, смонтированных непосредственно в
операторной или щитовой (например, насосной станции) и
предназначенных для непрерывной эксплуатации в промышленных
условиях, т.е. в широком диапазоне температур окружающей среды, при
наличии пыли, вибраций и электромагнитных помех. Вся информация о
состоянии технологического оборудования, сигналы от всех датчиков или
вторичных (нормирующих) преобразователей подключаются либо напря-
мую к компьютеру ввода-вывода, либо через сеть распределенных
контроллеров.
Технические характеристики
Наименование параметра Значение
Количество контролируемых
шлейфов сигнализации
(информационная емкость),
шт.
4
Диапазон рабочих токов ШС,
мА
От 0 до 60
Максимальная скорость
обмена по последовательному
интерфейсу RS–485 ModBus
RTU, кбит/с
115,2
Диапазон напряжений
питания, В
От 18 до 36
Максимальная мощность
потребления, Вт
8
Степень защиты от внешних
воздействий по ГОСТ 14254,
обеспечиваемая оболочкой
сигнализатора в зависимости
от исполнений:
- МС-АП-01-1Р
- МС-АП-01-ВЗ
- МС-АП-01-TS
- МС-АП-01-00
IP 67
IP 66
IP 20
IP 00
Габаритные размеры в
зависимости от исполнения,
не более, мм:
- МС-АП-01-00
- МС-АП-01-1Р
- МС-АП-01-TS
- МС-АП-01-ВЗ
100 x 110 x
351
175 x 180 x
85
75 х 105 х 50
300 х 250 х
70
Масса в зависимости от
исполнения, не более, кг:
- МС-АП-01-00
- МС-АП-01-1Р
- МС-АП-01-TS
- МС-АП-01-
ВЗ
0,2
1,0
0,5
3,0
Рабочий диапазон температур,
о
С
От –20 до
+60
В компьютер устанавливается необходимое количество плат ввода-
вывода унифицированных сигналов, соединенных с терминальными
модулями, которые распределены по монтажным панелям в соседних стой-
ках.
Компьютеры оснащаются гальванически развязанным интерфейсом
промышленной сети Ethernet. С помощью этой сети реализуется общее
пространство обмена данными между компьютерами системы. Физической
средой передачи данных может быть витая двухпроводная или волоконно-
оптическая линия связи.
Визуализация технологического процесса в удобном, интуитивно
понятном графическом виде осуществляется на рабочих станциях
операторов – промышленных компьютерах в настольном исполнении.
Удаленные пользователи корпоративной сети могут просматривать
мнемосхемы с оперативной технологической информацией посредством
обычного Internet Explorer. Программное обеспечение системы следующее:
· основой для написания служит специализированная среда разработки
программного обеспечения АСУ ТП-SCADA-пакет GENESIS32;
· ОРС серверы – драйверы устройств, поддерживающие интерфейс OLE
for Process Control, служат мостом между аппаратным обеспечением ввода-
вывода и любой современной SCADA-системой.
Адресуемый пожарный многоканальный сигнализатор
МС-АП-01
Многоканальный адресуемый пожарный сигнализатор [54]
предназначен для приема сигналов пожарных извещателей (ПИ), их ад-
ресации и передачи информации по последовательному интерфейсу в
составе технических средств пожарной и охранно-пожарной сигнализации,
аппаратуры автоматических систем пожаротушения типа АСПТ «ЭлеСи» и
другого аналогичного оборудования.
Рис. 3.71. Общий вид многоканального сигнализатора МС-АП-01
Сигнализатор может быть выполнен как в обычном исполнении, так и
в корпусе со степенью защиты IP67, со взрывозащитной вида
«Взрывонепроницаемая оболочка» и в корпусе с установкой на монтажный
рельс DIN35.
Все исполнения сигнализатора, выполненные по одной электрической
схеме, обеспечивают одинаковый набор функций и различаются
конструкцией корпуса. Сигнализатор имеет возможность работы со
шлейфом сигнализации (ШС) с нормально разомкнутым (NO) и нормально
замкнутым (NC) состоянием пожарных извещателей в дежурном режиме.
Сигнализатор имеет сертификат соответствия требованиям пожарной
безопасности, свидетельства о взрывозащищенности Госэнергонадзора и
разрешение на применение Госгортехнадзора РФ.
Рис. 3.72. Программный комплекс Allplan
В работе [54] предлагается современный программный комплекс
Allplan рис. 3.72 для профессиональных проектировщиков, руководителей
строительных организаций, производителей материалов, разработчиков
новых строительных технологий с целью комплексной автоматизации
проектно-строительных работ.
Идея, заложенная в разработках компании Nemetschek AG,
заключается в обеспечении документированного сопровождения объекта
строительства на всех этапах его жизненного цикла – от замысла до
утилизации (рис. 3.73) и в создании виртуальной модели объекта
строительства.
Из виртуальной модели может быть получена информация самого
разного назначения – от количества материала и объема работ до